Proe运动仿真实例
PROE仿真与动画(有实例讲解)

组 根据 锁 或 锁任意 体或 连接:打开“连接 件”对话框,使用此对话框可 需要 定 解
主 连接,
组 并运行 件分析。 添 辑 移除 复 或 分析:打开“分析”对话框,使用此对话框可 加、编 、
、 制 运行分析。
回放 回放 回放 将 保存 :打开“ ” 对话框,使用此对话框可 分析运行的结果。也可 结果
初始 初始 指 初始 为 条件:打开“ 条件”对话框,使用此对话框可 定
体或槽 初始 连接轴、主
定义速度 条件。
位置快照,并可 点、
属性 属性 指 属性 指 质量 :打开“质量 组件的密度。
”对话框,使用此对话框可 定零件的质量
,也可 定
拖 拖 将 拖 至 拍取 动:打开“ 动”对话框,使用此对话框可 机构 动 所需的配置并 快照。
1.销钉连接
,重新 定 件 件参照,如图 1-6 所示。
指 公差 设置:打开“设置” 对话框,使用此对话框可 定"机械设计"用来装配机构的 ,
指 失败 将采取 否发 警 声 失败 也可 定在分析运行
否暂停 或 继续 该 利 完 时是
运行 是
时“机械设计”
的操作。如是 出 告 ,操作
运行等等, 配置有 于设计者高效率的 成工作。如图 1-7
复 齿 制现有的 轮副。 辑 伺服电动机:打开“伺服电动机”对话框,使用此对话框可定义伺服电动机,也可编 、
移除或复制现有的伺服电动机。
执 执 执 辑 行电动机:打开“ 行电动机”对话框,使用此对话框可定义 行电动机,也可编 、 移除或复 执 制现有的 行电动机。
辑 移除或复 弹簧:打开“弹簧” 对话框,使用此对话框可定义弹簧,也可编 、
第 1 章 运动仿真
ProE Wildfire 5.0高级案例-齿轮机构仿真

案例:齿轮机构运动仿真
案例背景:
齿轮机构是用来传递空间任意两轴间的运动和动力. 齿轮机构的有点就是:结构紧凑,工作可靠,效率高,寿命长.
模型文件
案例建模所要用到的工作台:
装配工作台
案例建模时间 1.5小时
视频文件在光盘Pre/E-A05中
机构分析:
机构分析
该机构包括齿轮和齿条两种传动零件.
设计步骤
步骤8:选择菜单"应用程序"|"机构"进入机构环境
设计步骤
步骤9:选择菜单"编辑"|"连接",检查装配连接.
设计步骤
步骤10:单击"定义齿轮副连接"按钮 置传动比为14:34. ,定义圆锥齿轮连接,设
设计步骤
步骤11:单击"定义齿轮副连接"按钮 条比为180. ,定义齿条连接,设置齿
设计步骤
步骤16:定义质量属性,单击"定义质量属性"按钮 下拉类表中选择"组件",选择整个机构. ,在"参照类型"
设计步骤
步骤17:单击"定义阻尼器"按钮 20. ,添加阻尼器,将阻尼系数定义为
设计步骤
步骤18:单击"机构分析"按钮 单击"运行"按钮. ,在"类型"下拉列表中选择"动态",
设计步骤
步骤19:单击"生成分析的测量结果"按钮 ,进行结果分析.
小结
通过本例可以具备以下软件使用能力 创建凸轮机构运动仿真环境的能力. 创建带有载荷的运动仿真能力. 测量项目设置和检测结果的获取能力.
PROE中齿轮副运动仿真的制作

在PROE中进行单级圆柱齿轮副的运动仿真 在新的PROE(3以上版本)中可以使用齿轮副连接方式控制两个连接轴之间的速度关系,齿轮副中的每个齿轮都需要有两个主体和一个接头连接。
第一主体(指定为托架)通常保持固定不动。
第二主体能够运动,根据所创建的齿轮副的类型,可称为齿轮 、小齿轮或齿条。
齿轮副连接可约束两个连接轴的速度,但是不能约束接头连接的主体相对空间方位。
在齿轮副中,两个运动主体的表面不必相互接触就可以工作,因为齿轮副被视为速度约束。
并非基于模型几何,因此可直接指定齿轮比。
下面结合实例介绍使用齿轮副连接方式控制输入轴与输出轴之间速度比的基本操作方法,请注意体会其中的技巧知识。
创建单级圆柱齿轮减速器机构,然后进行运动仿真。
设计步骤一.新建一个名为“asm17-2”的文件(装配文件),采用毫米、牛、秒单位制,进入PROE的装配模块二.首先向装配文件中调入第一个零件“BASE.prt”,(这是一个装配的支架性的零件)操作过程如图所示:1选择“插入”,“元件”,“装配”命令或单击调入按钮,然后在系统弹出的“打开”对话框中选取零件“BASE”后,单击“打开”按钮,系统立即在绘图区中调入该零件。
2同时系统还弹出装配操控板,要求用户将打开的零件按照一定的装配约束关系进行空间定位,单击常规装配约束类型中的按钮表示系统将在默认位置装配该元件,即将该零件定义为机构的基础主体。
三.调入零件“gear1.prt”,然后创建第一个销钉连接,操作过程如下1选择“插入”,“元件”,“装配”命令或单击调入按钮然后在系统弹出的“打开”对话框中选取零件“gear1.prt”后,单击“打开”按钮,系统立即在绘图区中调入该零件。
2同时系统还弹出装配操控板,要求用户将打开的零件按照一定的装配约束关系进行空间定位,单击预定的连接集中的“销钉”连接方式。
在该零件(gear1)上选择轴线,在第一个零件(BASE)上选择轴线以定义轴对齐约束,然后分别选择两零件的对应圆柱端面以定义平移约束。
proe仿真分析特例——自卸汽车举升机构的动态仿真设计

图2 车厢某点速度的仿真测量定义
三、结论
通过对加伍德举升机构运动仿真的具体实践,实现了运动学、动力学分析及装配干涉、运动协调性的验证。揭示了运动仿真的特点、方法、对象和主要应用范围,论证了仿真运动分析对机构设计的指导作用。特别是仿真测量分析,对获得机构运动位置、速度、运动副之间相互关系及机构零件载荷情况的综合数据有着创造性的重要意义。使设计者能够直接在计算机上修改模型参数,达到机构优化的目的。
【参考文献】
[1]黄圣杰,等.Pro/ENGINEER.2001高级开发实例[M].北京:电子工业出版社,2002.
[2]王雄,谢金元.自卸车倾卸机构设计的研究[J].汽车技术,1992,(10).
2.创建阻尼器:当运动分析必要时,可在各连接轴上及两主体摩擦面之间设定阻尼要素,建立相应的运动阻尼力。通过点击菜单Mechanism→阻尼器→新建,在阻尼器定义对话框中,选择建立阻尼器的方式,设定阻尼器系数的大小。
3.创建外力和外力矩:通过点击下拉菜单Mechanism→力/力矩 →新建,来模拟机构运动的外部环境。其类型有“点力”与“主体扭矩”,必须指出“模”和“方向”,要特别注意。
(七)执行动力学仿真分析
定义完成后,点击“运行”按钮,系统就会根据运动模型和运动环境对机构进行分析,通过分析反馈信息,完善运动模型,变化运动环境,最终使结果趋向满意。
(八)定义分析测量特征
加伍德举升机构设计主要仿真分析的对象为:三角臂总成与车箱底板铰接座、拉杆前端销孔、联轴节销轴之间的位移、速度、加速度与净负荷。点击菜单Mechanism→测量,弹出“测量结果”对话框,选定位移、速度与加速度、净负荷等测量对象,输入相关零件欲求点的相应分量或直接选定某一轴确定后,即可获得仿真测量定义物理量的相关图显,如图2所示。返回测量结果集。在结果集中单击“分析定义名”,在测量选项的名称后可显示测量分析的数值。再单击“测量名称”和“测量”钮,系统弹出“图形工具”框,显示特指测量对象的动态曲线图。通过上述仿真分析测量,获得机构零件各模块运动学、动力学过程各计算要素的精确参数。
ProE丝杠螺杆螺母的运动仿真教程

第一步当然是建模咯,这个我就不说了
第二步新建组件,创建一根轴,这根轴是用来给螺杆做销钉定义用的
第三步插入螺杆元件,用销钉~~~怎么定义应该知道吧,轴对齐,面对齐,不知道的先学装配的基础教程
第四步插入螺母元件,先用圆柱连接,使两个元件同轴
定义好之后别急着打钩~~~按左下角的新设置
第五步新设置一个槽连接(槽连接就是点在线上运动~~),这个是最关键的,先选螺杆上的一条螺纹边
一定要是同一条线~~~~螺纹线会分成很多段,按ctrl把整条线都选上,建议选内螺纹,好选
选好线后选点,这个点毫无疑问在螺母上,可以选螺母的内螺纹的一个定点,一定要是和在螺杆上的那条螺纹线匹配的那条!!!
意思就是这一点是在刚才选的螺纹线上运动的
这个定义好之后槽连接就定义好了,别急着打钩,还有呢
第六步因为现在的螺母还会旋转
所以我们再定义一个平面连接,使它不会转动,选择面的时候要注意,不要选到螺杆的平面,到时候螺母随螺杆一起旋转了
现在终于可以打钩了~~~到此,装配就完成了
接下来就是仿真了
第七步在应用程序里选机构
第八步定义一个伺服电机,轴在螺杆上,选速度,A=100
第九步就可以分析了
类型选动态,时间稍微长点吧,如果你觉得分析有可能失败,那就短点,因为如果装配有问题,或计算两很大的话电脑计算的会很慢
点运行就可以看到动了
每次看不一定都要在分析里看,因为那计算,可能会很慢,可以在回放里看记得要保存哦,不然下次就又要分析了
终于完成了。
写图文教程真累
而且表达能力欠缺,希望朋友们多多提意见啊
本来想做视频的,老大说有可能会出期刊。
只好图文了。
项目一四连杆机构运动仿真
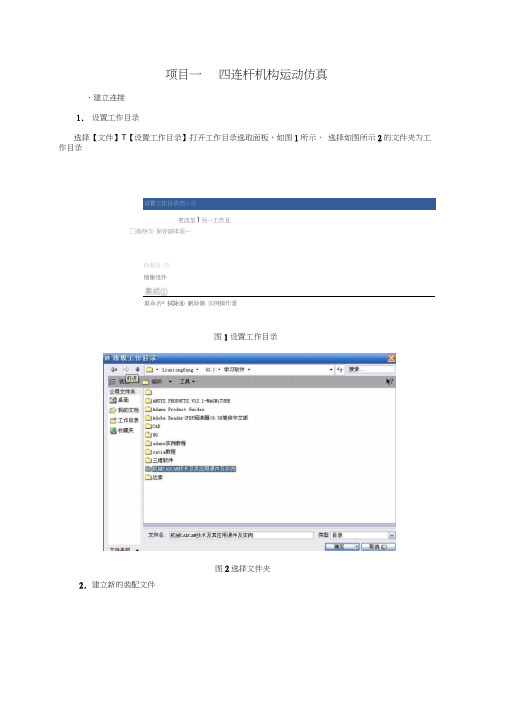
项目一四连杆机构运动仿真、建立连接1.设置工作目录选择【文件】T【设置工作目录】打开工作目录选取面板,如图1所示,选择如图所示2的文件夹为工作目录设置工作目录凹)小更改至1另一工作且□保存⑸ 保存副本⑥…負制目:苏镜像组件重命名® 拭除⑥ 删除側实例操作蛋图1设置工作目录图2选择文件夹2.建立新的装配文件打开PROE软件,点击’文件’,选择’新建’,有如下对话框弹出(如图3所示),在类型项选择‘组件’,子类型项选择‘设计’,名称改为‘ 2009109120',不使用缺省模板,点击’确定’。
有下对话框弹出(如图4所示),在模板中选择’mmns -asm -design 直接点击’确定’开始进入制图过程。
使用缺省欖板取消图3新建组件、装配文件绘件件造囹式告夬局记草零组制绘格报圏布标型送33也叵□□古----g ----子类型--- -------------- -- - —◎设计0校验工艺计划NC欖型欖具布局E工t.简化克示名称公■用名称2(X59109120确定「回新文件选项n图4选择单位1.机架的放置动仿真四连杆中Igrou nd.prt ,单击打开。
图5载入文件||曲-""^111• L二二■ JC在主界面出现一行任务栏 ,在’自动’选项中选择 A 離省丨,再在右边单击’ 八,如图6所示。
界面中出现一行任务栏,如图 7所示。
(1)进入PROE 的主界面,点击右下角图标记',有如下对话框弹出(如图5所示),选择运(2)再点击右下角图标选择运动仿真四连杆中 1-ground-prt, 单击’打开’,则在主图6机架1-2.曲柄的装配在单击右下角‘'在运动仿真四连杆中选择’2-cra nk-prt' ,单击’打开’。
在主界面出图7 机架2 用鼠标左键选择两平面对齐,如图8所示。
在选择两侧面对齐,在任务栏中选择,如图9所示,再单击右边'U:L JPT -▼口也・ JEfj - HftJW "1 " II XKE 醐■■: ; ■住图8平面对齐=对卉* £「二|云一op|t | X状态:部分约束图9侧面对齐申 fS;冒 rairM?12所示。
PROE运动仿真教程之欧阳家百创编

P ROE机构仿真之运动分析欧阳家百(2021.03.07)关键词:PROE 仿真运动分析重复组件分析连接回放运动包络轨迹曲线术语创建机构前,应熟悉下列术语在PROE中的定义:主体(Body) - 一个元件或彼此无相对运动的一组元件,主体内DOF=0。
连接 (Connections) - 定义并约束相对运动的主体之间的关系。
自由度 (Degrees of Freedom) - 允许的机械系统运动。
连接的作用是约束主体之间的相对运动,减少系统可能的总自由度。
拖动 (Dragging) - 在屏幕上用鼠标拾取并移动机构。
动态 (Dynamics) - 研究机构在受力后的运动。
执行电动机(Force Motor) - 作用于旋转轴或平移轴上(引起运动)的力。
齿轮副连接(Gear Pair Connection) - 应用到两连接轴的速度约束。
基础 (Ground) - 不移动的主体。
其它主体相对于基础运动。
接头 (Joints) - 特定的连接类型(例如销钉接头、滑块接头和球接头)。
运动(Kinematics) - 研究机构的运动,而不考虑移动机构所需的力。
环连接 (Loop Connection) - 添加到运动环中的最后一个连接。
运动 (Motion) - 主体受电动机或负荷作用时的移动方式。
放置约束(Placement Constraint) - 组件中放置元件并限制该元件在组件中运动的图元。
回放 (Playback) - 记录并重放分析运行的结果。
伺服电动机 (Servo Motor) - 定义一个主体相对于另一个主体运动的方式。
可在接头或几何图元上放置电动机,并可指定主体间的位置、速度或加速度运动。
LCS - 与主体相关的局部坐标系。
LCS 是与主体中定义的第一个零件相关的缺省坐标系。
UCS - 用户坐标系。
WCS - 全局坐标系。
组件的全局坐标系,它包括用于组件及该组件内所有主体的全局坐标系。
PROE4.0曲柄滑块机构运动学仿真

曲柄滑块机构运动学仿真
1、目的
本文档旨在基于PROE4.0版本软件,设计一曲柄滑块机构,并仿真测量其关键点速度、加速度、位移等关键信息。
2、模型设计
2.1 整体尺寸介绍
模型主要包括底座、曲柄、连杆、滑块四个零部件,具体尺寸如图所示。
AB=28mm,BC=68mm,CE=435mm,AD=150mm,DF=60mm。
图1 关键位置尺寸
2.2 部件连接关系
1)底座为机架,固定连接,在PROE软件中,切记连接成“用户定义”-“缺省”
2)曲柄与底座为“铰接”。
与连杆也为“铰接”。
3)滑块与底座为“滑动杆”连接。
4)连杆一端与曲柄为“铰接”;再新建一连接关系,与滑块“铰接”。
3、运动学仿真设置
1)在装配完成后,点击“应用程序”-“机构”菜单,进入机构仿真界面。
2)添加伺服电机驱动,设置成如图界面,并在“速度”一栏,点击“速度、位置、加速度”
3)仿真。
点击仿真按钮,设置成如图所示,选择“运动学”仿真,并点击“运行”,机构开始动作。
4)回放,保存。
仿真完成后,点击回放按钮,可以回放仿真,并进行保存。
5)测量。
仿真结束后,可以测量关键信息,如关键点速度、加速度、位置等,如图所示。
在左上角可以显示相应曲线。
6)仿真结束后,保存。
下一次运行时,可以读取相关数据。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Proe运动仿真
将缸体切除一半,便于仿真观察,将right基准面阵列5份,便于后续装配。
已复制外部几何为参照,创建活塞。
以复制外部几何为参照,创建偏心轮。
以复制外部几何为参照,创建连杆1 .
将缸体,活塞,连杆1,以缺省方式装配,再激活连杆1,创建剩余部分。
再以偏心轮为参照,创建连杆1 的下端部分。
将连杆1 的边界和2个孔位用草绘线画出来。
然后打开连杆1,将草绘线阵列5份。
在组件里面创建新元件,创建连杆2.
再重新新建一个组件,首先缺省装配缸体。
再用【销钉】装配偏心轮。
用【滑动杆】装配活塞。
用2个【销钉】装配连杆1.
装配好这些之后,进入【机构】模块。
点击【伺服电动机】工具。
选择偏心轮和缸体之间的销钉轴为运动轴。
设置电动机的速度。
点击【机构分析】工具。
设置【终止时间】。
运动分析之前,先抓取一个快照。
运行分析定义。
可以看到机构动了,这里我的机构是经过修改的,所以运动没有问题。
如果机构运动不了或出现干涉,说明零部件尺寸不合理,只需修改骨架模型即可。
调整好之后,进入【标准】模块。
用【重复】命令,装配剩下的活塞。
用2个【销钉】装配连杆2,然后用【重复】命令装配剩下的3根。
所以零件装配完毕,进入机构模块仿真。
仿真结果。
cv
将缸体切除一半,便于仿真观察,将right基准面阵列5份,便于后续装配。
已复制外部几何为参照,创建活塞。
以复制外部几何为参照,创建偏心轮。
以复制外部几何为参照,创建连杆1 .
将缸体,活塞,连杆1,以缺省方式装配,再激活连杆1,创建剩余部分。
再以偏心轮为参照,创建连杆1 的下端部分。
将连杆1 的边界和2个孔位用草绘线画出来。
然后打开连杆1,将草绘线阵列5份。
在组件里面创建新元件,创建连杆2.
再重新新建一个组件,首先缺省装配缸体。
再用【销钉】装配偏心轮。
用【滑动杆】装配活塞。
用2个【销钉】装配连杆1.
装配好这些之后,进入【机构】模块。
点击【伺服电动机】工具。
选择偏心轮和缸体之间的销钉轴为运动轴。
设置电动机的速度。
点击【机构分析】工具。
设置【终止时间】。
运动分析之前,先抓取一个快照。
运行分析定义。
可以看到机构动了,这里我的机构是经过修改的,所以运动没有问题。