基于proe六自由度机械手参数化建模及运动仿真
六自由度机械手的坐标建立及运动学分析
第**卷第**期20**年*月机械工程学报JOURNAL OF MECHANICAL ENGINEERINGVo l.** No.**** 20**DOI:10.3901/JME.20**.**.***六自由度机械手的坐标建立及运动学分析摘要:从运动学分析的基础上着手研究轨迹控制的问题,利用运动学逆解的方式分析复杂轨迹运动的可行性和实用性。
通过建立机械手的笛卡尔坐标系,推导出机械手的正、逆运动学矩阵方程,并研究了正、逆运动学方程的解;在此基础上建立机械手的工作空间,并讨论其工作空间的灵活性和存在可能性。
因此本文的另一种方式对六自由度串联机械手的复杂运动控制问题进行研究,提出以机械手示教手柄引导末端执行器对复杂运动轨迹进行预设计。
然后通过记录程序进行复杂轨迹的再实现,再对记录程序进行预修改,最终通过现有的程序进行设计编程完成复杂轨迹设计任务。
并利用MATLAB对轨迹进行仿真,对比其实际与计算的正确性。
最后本设计通过六自由度串联机械手实现平面文字轨迹,得出其设计的方式。
即首先利用示教手柄实现轨迹预设,记录预设轨迹程序,然后再对比程序初始化坐标进行手动编程。
关键词:六自由度机械手,笛卡尔坐标系,运动学方程,仿真,示教手柄The coordinates of six degrees of freedom manipulator and kinematics analysis is establishedWU Yanchao JIN Yuanxun ZHAO Xin LI Daohai SONG Ping MENG Ya ABSTRACT:T his article based on the analysis of kinematics to study the trajectory control problems, use of inverse kinematics of the complex mode of tracking movement of the feasibility and practicality. Through the establishment of the manipulator Cartesian coordinates, derived manipulator is the inverse kinematics matrix equation and the study is the inverse kinematics of the equation solution on the basis of this establishment manipulator working space. And discuss their work space The flexibility and the possibility exists.So in another way to the six degrees of freedom series manipulator motion control the complex issues of research, to handle the machinery Shoushi guide for the implementation of the end of the complex pre-designed trajectory. Then track record of the complicated procedure to achieve, and then record the pre-amended procedures.The eventual adoption of the existing procedures designed trajectory design of complex programming tasks. And using MATLAB simulation of the track, compared with its actual calculation is correct.The final design through six degrees of freedom series manipulator track to achieve flat text, draw their design approach. That is, first of all use of teaching handle achieve trajectory default the track record of default procedures, and then compared to manual procedures initialized coordinate programming.key words:Six degree-of-freedom manipulators,Cartesian coordinates, Equations of motion,Simulation, Demonstration handle机 械 工 程 学 报 第49卷第6期前言基于六自由度串联机械手的复杂运动控制的研究,期望通过一种使用的轨迹设计方法,即利用六自由度串联机械手实现平面复杂运动轨迹的设计,使其能在不同的工业生产下完成预定的轨迹实现的准确性和实用性,则该机械手将在实在加工工业中发挥更重要的作用,并可完成许多人工条件无法完成的任务,从而提高机械手的利用性。
六自由度机械臂控制系统设计与运动学仿真
六自由度机械臂控制系统设计与运动学仿真六自由度机械臂控制系统设计与运动学仿真摘要:近年来,随着工业自动化的快速发展,机械臂在生产制造领域的应用越来越广泛。
作为工业机器人的重要组成部分,机械臂的控制系统设计和运动学仿真成为了研究和应用的热点。
本文围绕六自由度机械臂的控制系统设计和运动学仿真展开研究,通过对机械臂的结构、动力学模型和运动学原理的分析,设计了一套完整的机械臂控制系统,并进行了运动学仿真验证实验。
研究结果表明,该控制系统能够实现六自由度机械臂的准确控制和精确运动。
关键词:六自由度机械臂,控制系统,运动学仿真,结构分析,动力学分析1. 引言机械臂是一种能够替代人工完成各种物体抓取、搬运和加工任务的重要设备。
随着工业自动化程度的提高和生产效率的要求,机械臂在生产制造行业中的应用越来越广泛。
机械臂的控制系统设计和运动学仿真成为了研究和应用的热点,尤其是六自由度机械臂。
六自由度机械臂具有较大的运动自由度,在复杂任务中具有更强的工作能力和适应性。
因此,研究六自由度机械臂的控制系统设计和运动学仿真对于改善机械臂的性能和应用具有重要意义。
2. 机械臂结构分析六自由度机械臂的结构由底座、第一至第六关节组成。
底座作为机械臂的固定支撑,通过第一关节与机械臂连接。
第一至第四关节形成了前臂部分,决定了机械臂的悬臂长度。
第五关节和第六关节分别为腕部和手部,负责完成机械臂的末端操作。
结构分析可以为后续的动力学和运动学建模提供基础。
3. 动力学模型机械臂的动力学模型是基于牛顿第二定律和欧拉定理建立的。
通过考虑机械臂各关节的质量、惯性和振动特性,可以对机械臂的力学性能进行描述。
动力学模型的建立是机械臂控制系统设计的重要基础。
4. 运动学原理机械臂的运动学原理研究机械臂的位置、速度和加速度之间的关系。
通过运动学原理可以确定机械臂的姿态和末端位置,实现机械臂的准确定位和精确控制。
运动学原理是机械臂控制系统设计和运动学仿真的重要内容。
基于PROE六自由度机械手参数化建模及运动仿真概论

基于PROE六自由度机械手参数化建模及运动仿真概论基于PRO/E(Pro/ENGINEER)六自由度机械手参数化建模及运动仿真(Introduction to Parametric Modeling and Motion Simulation of a Six Degree-of-Freedom Robot Arm Based on PRO/E)是一种基于 Pro/E 软件的机械手参数化建模方法和运动仿真技术的概念介绍。
机械手是一种能够执行预定动作的自动机器人系统,在工业领域被广泛应用。
参数化建模和运动仿真是机械手设计与验证的重要工具,可以提高设计效率和减少实验成本。
首先,本文介绍了 Pro/E 软件的基本原理和特点。
Pro/E 是一种三维 CAD(计算机辅助设计)软件,具有强大的参数化建模和运动仿真能力。
它可以通过调整参数来改变模型的形状和尺寸,以便满足不同的设计要求。
Pro/E 还提供了强大的运动仿真功能,可以模拟机械手在不同工况下的运动特性。
接下来,本文详细介绍了机械手的六个自由度,即机械手可以在三维空间中进行平移和转动的六个方向。
机械手的自由度决定了它的灵活性和工作范围。
参数化建模是在 Pro/E 软件中定义机械手的结构和参数,以便能够根据实际需求对机械手进行定制化设计。
然后,本文提出了一种基于 Pro/E 软件的机械手参数化建模方法。
通过定义机械手的几何尺寸、关节角度和连杆长度等参数,可以实现对机械手结构和工作范围的快速调整。
参数化建模可以大大加快机械手的设计过程,减少人工调整的工作量。
最后,本文介绍了基于 Pro/E 软件的机械手运动仿真技术。
通过给定关节的运动规律和工作环境的约束条件,可以模拟机械手在不同运动状态下的姿态和运动轨迹。
运动仿真可以帮助设计师评估机械手的性能和可靠性,并进行优化设计。
总结起来,基于 Pro/E 的六自由度机械手参数化建模和运动仿真技术是一种高效、准确和可靠的机械手设计方法。
六自由度机械臂控制系统设计与运动学仿真
六自由度机械臂控制系统设计与运动学仿真六自由度机械臂控制系统设计与运动学仿真摘要:机械臂在现代工业自动化领域中扮演着重要的角色。
为了更好地应对复杂的工业任务,提高生产效率和精度,本文设计了一套六自由度机械臂控制系统,并利用运动学仿真进行了验证。
文章首先介绍了机械臂的概念及其应用领域,然后详细介绍了六自由度机械臂的结构、运动学原理以及控制系统设计方案。
最后,通过运动学仿真实验验证了设计方案的可行性和稳定性,为进一步进行实际应用提供了有力支持。
一、引言机械臂是一种能够模拟人类手臂运动的机械装置,广泛应用于工业制造、物流配送、医疗辅助等领域。
随着自动化技术的发展,机械臂正在不断发展和完善。
其中,六自由度机械臂由于其结构灵活、多功能和高精度的特点,成为研究和应用较多的一种类型。
二、六自由度机械臂结构与运动学原理六自由度机械臂由机械臂底座、第一关节、第二关节、第三关节、第四关节、第五关节和末端执行器组成。
每个关节都有一个自由度,使得机械臂可以在六个方向上进行运动。
机械臂的运动是通过电机控制与驱动的。
机械臂的运动学原理是通过求解机械臂的位置、速度和加速度,来实现机械臂的运动控制。
机械臂的位置可以通过关节角度得到,而关节角度可以通过编码器和传感器实时获取。
机械臂的速度和加速度可以通过微分、反向运动学求解得到。
利用运动学原理,可以在给定任务下控制机械臂的精准运动。
三、六自由度机械臂控制系统设计方案本文设计的机械臂控制系统采用了嵌入式控制器进行控制。
主要原因是嵌入式控制器具有体积小、功耗低、响应速度快等优点,能够满足机械臂控制系统的需求。
控制系统主要包括关节驱动模块、通信模块、控制算法和人机交互界面。
其中,关节驱动模块用于控制机械臂的运动,通信模块用于与上位机进行数据传输,控制算法用于实现机械臂的运动控制,人机交互界面用于操作和监控机械臂的运动状态。
四、运动学仿真实验与结果分析为了验证设计方案的可行性和稳定性,本文进行了运动学仿真实验。
CREO六轴机械手的仿真运动图文教程
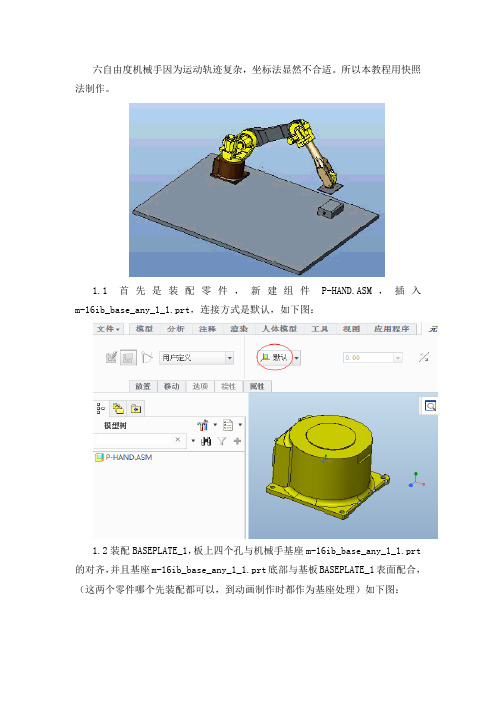
六自由度机械手因为运动轨迹复杂,坐标法显然不合适。
所以本教程用快照法制作。
1.1首先是装配零件,新建组件P-HAND.ASM,插入m-16ib_base_any_1_1.prt,连接方式是默认,如下图:1.2装配BASEPLATE_1,板上四个孔与机械手基座m-16ib_base_any_1_1.prt 的对齐,并且基座m-16ib_base_any_1_1.prt底部与基板BASEPLATE_1表面配合,(这两个零件哪个先装配都可以,到动画制作时都作为基座处理)如下图:1.3装配零件m-16ib_axis1_any_1_1.prt,以销的方式连接,注意销连接的方向,如图:1.4旋转轴对齐,当前位置输入0,勾选启用重新生成值。
如下图:1.5销连接方式装配m-16ib_axis2_any_1_1.prt,注意销连接的方向,如下图:平移设置中,约束类型为距离,分别选择下面两个面,偏移距离15,如下图:旋转轴选择如下图的两个基准面,当前位置输入0,如下图:当前位置输入-40,零件往如下图所示的方向偏40度(这个要根据销连接的运动方向,如没有如下图所示的方向偏就改变销连接方向),如下图:点击设置零位置,勾选启用重新生成值,确定完成装配,如下图:1.6装配零件m-16ib_axis3_any_1_1.prt,还是销连接,轴对齐,平移选择下图两个面,约束类型为重合,注意销连接方向,如下图:旋转轴选择下面两个基准面,如下图:当前位置输入90,零件往如下图所示方向翻转90度(翻转的方向取决于销的连接方向),如下图:点击设置零位置,勾选重新生成值,如下图:装配零件m-16ib_axis4_any_1_1.prt,销连接,如下图:旋转轴如下图:装配零件m-16ib_axis5-6_any_1_1.prt,销连接,注意连接方向,如下图:旋转轴设置如下图:装配零件FIX_1,销连接,注意连接方向,如下图:旋转轴的设置和前面的差不多,如下图:物料装配,在这里不用约束,用户定义,放置设置成自动,如下图:显示基准面,点击拖动元件,弹出对话框,点击约束—对齐两个图元,分别选择下图两个基准面,如下图:点击对齐两个图元,分别选择下图两个曲面,如下图:点击对齐两个图元,分别选择下图箭头的两个基准面,在下面的偏移,offset处输入-700,如下图:点击拍下当前配置的快照,如下图:再点击拍下当前配置的快照,点击约束,点击对齐两个图元,点击显示基准面,分别选择下图两个基准面,如下图:点击对齐两个图元,分别选择以下曲面,如下图:对齐结果,如下图:隐藏基准面,点击主体-主体锁定约束,如下图:分别选择物料PP_1和FIX_1,然后点击右下角的小对话框的确定,生成一个主体锁定约束,如下图:点击运动轴约束,选择下图箭头中的销连接,如下图:下面的偏移值就是当前销连接的位置,如下图:用同样的办法添加下图所示的三个连接运动轴约束,如下图:添加后,效果如下图:添加完毕后,点击约束旁边的快照,点击将选定快照更新为屏幕上的当前配置,如下图:点击拍下当前配置的快照,点击约束,删除两个对齐图元约束,点击相应的对齐图元约束,观察模型显示来判断,如下图:点击连接3、4、8把偏移值分别改成0,观察机械手与物料变化情况,如下图:添加完毕后,参照前面一样,点击约束旁边的快照,点击将选定快照更新为屏幕上的当前配置;点击拍下当前配置的快照,点击约束,删除一个对齐图元约束,点击相应的对齐图元约束,观察模型显示来判断,如下图:点击运动轴约束,添加下图所示的连接,如下图:在新添加的连接约束下面的偏移输入90,如下图:整个机械手旋转了90度。
基于ProE的六自由度机械手的仿真
基于Pro/E的六自由度机械手的仿真摘要机器人是自动执行工作的机器设备。
它不但可以接受人类指挥,而且还能运行预先编排的程序,又方便根据以人工智能技术制定的原则纲领行动。
它的任务是协助或者说是代替人类工作的工作,例如生产业、建筑业,繁琐的,危险的作业。
六自由度自由度机械手做为现代机器人的一个重要组成部分,也随着技术的发展不断发展。
普通机械手只能完成单工作任务或者较简单的操作,多自由度机械手在很多的工程技术及工程实际中能更为合理的进行一些现实操作。
笔者利用三维软件Pro/E 制图,对六自由度机械手的运动机构进行分析、设计,并对其进行三维造型的建模与仿真。
通过Pro/E这个三维软件工具来进行六自由度机械手的建模设计,完整体现产品设计的基本流程,提出一种产品设计的新思路,展示Pro/E在产品设计上的优势。
第一利用Pro/E便捷的建模工具来对机械手的各零件进行造型设计;第二利用Pro/E按要求对机械手零件以各种约束和销钉等连接来进行合理装配;第三利用Pro/E的机构模式对机械手的装配作添加伺服器等操作,来实现六自由度机械手的运动仿真。
Pro/E简单便捷的的实现了对六自由度机械手的装配和运动仿真,效果非常直观明了。
关键词:六自由度机械手,Pro/E,建模,仿真Simulation of Six Degrees of Freedom Manipulator Based on Pro/ EAbstractThe robot is machinery and equipment that carries out operation automatically .It can not only accept human command, but also can run a pre-arranged program by itself . Its mission is to assist or replace human work, such as manufacturing industry, construction, tedious and dangerous operation. Six degrees of freedom manipulator as an important part of modern robot also continuous development along with the of technology development. General manipulator can only complete a single task or a relatively simple operation, multi-degree of freedom manipulator can be more reasonable for some real-world operating in a lot of engineering skills and engineering practical.I use Pro / E , a three-dimensional software, drawing, analyze, design the movement organization of six degrees of freedom manipulator, and make modeling and simulation of three-dimensional shape of motion for six degrees of freedom manipulator. I conduct modeling design for Six degrees of freedom manipulator by using the three-dimensional software tools Pro / E ,which course shows us the basic process of the product’s design fully, puts forward new ideas for a product design and demonstrates the advantage of Pro / E. Firstly, I use Pro / E’s convenient modeling tool to design the various parts of the robot; Secondly, I fit the various parts of the robot together according to a variety of constraints and pin connected. Thirdly, I use institutional model of Pro / E to add server operation in order to achieve motion simulation of the six degrees of freedom manipulator. Pro / E is simple and convenient to achieve the six degrees of freedom manipulator assembly and motion simulation, the effect is very simple and clear.Keywords: Six Degrees of Freedom Manipulator, Pro / E, Modeling, Simulation目录第一章绪论 (1)1.1六自由度机械手的简介 (1)1.2六自由度机械手的发展 (1)1.3六自由度机械手的研究意义 (2)1.4机械手的研究状况 (3)第二章 Pro/ENGINEER的选择使用 (4)2.1 Pro/ENGINEER产品介绍 (4)2.2 Pro/ENGINEER六大模块 (4)2.3 Pro/ENGINEER的优势 (6)第三章六自由度机械手零件的设计建模 (7)3.1 六自由度机械手底座建模 (8)3.2 六自由度机械手垂直轴旋转体的建模过程 (8)3.3 六自由度机械手的臂膀建模过程 (9)3.4 六自由度机械手手掌建模过程................ 错误!未定义书签。
基于虚拟样机技术的六自由度机械手建模与仿真
要: 六 自由度机械手广泛地应 用于工业、 农业等领域中, 发挥着重要的作 用。为此 , 设计 了一种六 自由度机械手, 并基
于虚拟样机技 术进行 了建模与仿真。首先 。 利用 P r o / E N G I N E E R软件 , 建立 了一种六 自由度机械手机械 系统的三维模型;
其次, 利用 P r o EN / G I N E E R的模块对机械手进行 了虚拟装配 ; 接着 , 采用专用接 口模块 Me c h a n i s m / P r o 将模型导入动 力学
Mo d e l a n d Si mu l a t i o n f o r a 6 - DOF Ma n i p u l a t o r b a s e d
o n Vi r t u a l Ma c h i n e Te c h n o l o g y
A b s t r a c t : Ma n i p u l a t o r s w i t h s i x f r e e d o m d e g r e e s o l ' e w i el d y u s e d i n i n d st u r y ,a g r i c u l t u r e a n d o t h e r 胁 a n d p l a y( 1 , l
机 械 设 计 与 制 造
1 7 8
第 7期
2 0 1 3年 7月
Ma c h i n e r y De s i g n &
Ma n u f a c t u r e
基 于虚拟 样机 技 术 的 六 自由度 机械 手建模 与仿 真
孙 群, 张 龙, 赵 颖
2 5 2 0 5 9 ) ( 聊城大学 汽车与交通工程学院 , 山东 聊城
六自由度工业机器人虚拟设计及仿真分析
六自由度工业机器人虚拟设计及仿真分析六自由度工业机器人虚拟设计及仿真分析近年来,随着工业的快速发展,机器人已成为许多生产厂家的重要生产工具。
特别是六自由度工业机器人,其具有高度的灵活性和广泛的适用性,已经在许多领域得到了广泛的应用。
为了满足不同应用场景的需求,并提高机器人的性能和精度,虚拟设计与仿真成为了必不可少的技术手段。
六自由度工业机器人是指拥有六个独立运动自由度的机器人。
这六个自由度分别为三个旋转自由度和三个平移自由度。
通过灵活地控制这些自由度,机器人可以实现在三维空间内的无序复杂任务,如装配、搬运、焊接等。
然而,设计和优化这样一个复杂的机器人系统并不是一件容易的事情。
传统的实物设计和试错方法耗时耗力,并且难以满足设计师对机器人性能的要求。
因此,虚拟设计及仿真成为了一种必要的手段。
虚拟设计是指利用计算机建模和仿真技术,通过虚拟环境模拟和预测机器人的运动、力学和控制特性。
首先,设计者可以通过CAD软件对机器人进行三维建模,包括机器人的机械结构、关节和驱动系统等。
然后,根据机器人的工作场景和任务需求,设计者可以设置机器人的路径和动作,并模拟机器人在现实环境中的运动。
通过虚拟设计,设计者可以进行多次模拟和实验,预先检查机器人的性能,并进行必要的改进和优化。
仿真分析是指通过数值计算和模拟,对机器人的运动、力学和控制性能进行评估和分析。
在仿真分析中,设计者可以根据机器人的运动学学关系和动力学模型,计算出机器人各关节和末端执行器的位姿、速度和力矩等。
通过对这些关键参数的分析,能够更好地理解机器人的工作原理,并进行性能优化和故障诊断。
此外,仿真分析还可以帮助设计者评估机器人系统的稳定性、刚度和振动等性能指标。
虚拟设计及仿真在六自由度工业机器人的设计和优化中发挥着重要作用。
首先,虚拟设计和仿真可以提高设计效率和准确性。
相比传统的实物设计和试验方法,虚拟设计可以节省大量的时间和费用,并且可以在设计的早期阶段检测和解决潜在的问题。