北航航空工程大型通用软件应用大作业样本
软件需求规格说明(范例)
项目名称软件需求规格说明文档签署记录文档修改记录目录1 引言 (1)1.1 目的 (1)1.2 项目背景 (1)1.3 范围 (1)1.4 参考资料 (1)1.5 综述 (1)2 总体概述 (2)2.1 产品描述 (2)2.2 产品功能 (2)2.3 用户特点 (2)2.4 设计约束 (2)2.4.1 标准规范 (2)2.4.2 软件开发语言 (2)2.4.3 软件开发工具和环境 (2)2.4.4 软件测试环境 (3)3 具体需求 (4)3.1 软件流程功能 (5)3.1.1 流程1 (5)3.2 功能需求 (7)3.2.1 试验资源管理 (7)3.2.2 试验过程管理 (9)3.3 软件模块划分 (11)3.4 系统集成接口 (12)3.4.1 与管理系统的接口 (12)3.5 性能需求 (12)3.5.1 精度 (12)3.5.2 时间特性要求 (12)3.6 数据处理要求 (12)3.7 软件质量要求 (13)3.7.1 易用性 (13)3.7.2 可靠性 (13)3.7.3 安全性 (13)3.7.4 可维护性 (13)3.8 可靠性、安全性和维护性要求 (13)3.8.1 软件安全性等级、可靠性指标 (13)3.8.2 软件运行寿命 (13)3.8.3 软件安全性要求 (13)3.8.4 软件健壮性要求 (13)3.8.5 软件不期望事件要求 (14)3.8.6 软件维护性要求 (14)4 运行环境规定 (14)4.1 部署方案 (14)4.2 系统运行的硬件环境要求 (14)4.3 系统运行的软件环境要求 (15)1 引言1.1 目的本文档是完成单位就项目名称项目编写的需求分析报告,为平台的设计及开发工作提供可靠的依据。
1.2 项目背景1)项目名称:2)本项目的任务提出者:北京宇航系统工程研究所3)本任务的完成者:4)产品用户:1.3 范围项目名称是完成单位为客户名称定制的集成门户,主要包括功能模块,达到的目标。
北航最优化方法大作业参考
1 流量工程问题1.1 问题重述定义一个有向网络G=(N,E),其中N是节点集,E是弧集。
令A是网络G的点弧关联矩阵,即N×E阶矩阵,且第l列与弧里(I,j)对应,仅第i行元素为1,第j行元素为-1,其余元素为0。
再令b m=(b m1,…,b mN)T,f m=(f m1,…,f mE)T,则可将等式约束表示成:Af m=b m本算例为一经典TE算例。
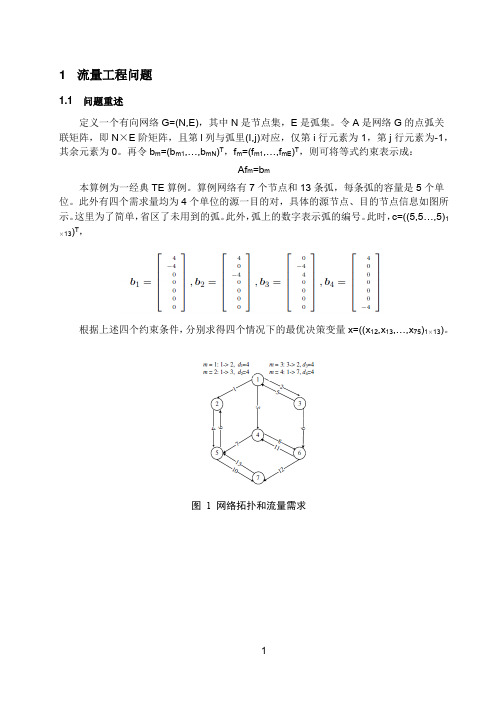
算例网络有7个节点和13条弧,每条弧的容量是5个单位。
此外有四个需求量均为4个单位的源一目的对,具体的源节点、目的节点信息如图所示。
这里为了简单,省区了未用到的弧。
此外,弧上的数字表示弧的编号。
此时,c=((5,5…,5)1 )T,×13)。
根据上述四个约束条件,分别求得四个情况下的最优决策变量x=((x12,x13,…,x75)1×13图 1 网络拓扑和流量需求1.2 7节点算例求解1.2.1 算例1(b1=[4;-4;0;0;0;0;0]T)转化为线性规划问题:Minimize c T x1Subject to Ax1=b1x1>=0利用Matlab编写对偶单纯形法程序,可求得:最优解为x1*=[4 0 0 0 0 0 0 0 0 0 0 0 0]T对应的最优值c T x1=201.2.2 算例2(b2=[4;0;-4;0;0;0;0]T)Minimize c T x2Subject to Ax2=b2X2>=0利用Matlab编写对偶单纯形法程序,可求得:最优解为x2*=[0 4 0 0 0 0 0 0 0 0 0 0 0]T对应的最优值c T x2=201.2.3 算例3(b3=[0;-4;4;0;0;0;0]T)Minimize c T x3Subject to Ax3=b3X3>=0利用Matlab编写对偶单纯形法程序,可求得:最优解为x3*=[4 0 0 0 4 0 0 0 0 0 0 0 0]T对应的最优值c T x3=401.2.4 算例4(b4=[4;0;0;0;0;0;-4]T)Minimize c T x4Subject to Ax4=b4X4>=0利用Matlab编写对偶单纯形法程序,可求得:最优解为x4*=[4 0 0 4 0 0 0 0 0 4 0 0 0]T对应的最优值c T x4=601.3 计算结果及结果说明1.3.1 算例1(b1=[4;-4;0;0;0;0;0]T)算例1中,由b1可知,节点2为需求节点,节点1为供给节点,由节点1将信息传输至节点2的最短路径为弧1。
北航EMBA 管理信息系统 作业范本供参考:ZF1908533
互联网时代与大数据管理信息系统第一次课后作业姓名:宋世微学号:ZF1908533一、2019年9月21日在课堂上学到的知识1、2019年,九月下旬。
我们在北京航空航天大学。
学习了,信息系统第一次课。
我们了解了,管理信息系统是用辅助一个企业学校政府组织,来管理日常工作的管理的系统。
包括有有软件和硬件两部分构成,分为系统软件和应用软件。
系统软件包括操作系统,数据库,中间件。
管理信息系统要软件包括ERP、OA、Scm、CRM、MEs。
我们还学习了一个企业的关键部门,有六个人,财,物,供,产,销,还学习了社会网络的弱联系和强联系。
所以大数据指的是这样现象,一个公司日常运营所生成和积累的用户行为数据增长如此快,以至于难以使用现在的数据库管理工1具来驾驭。
困难在于数据的获取,存储,搜索,分析,共享分析和规划等方面。
这些数据如此之大,已经不是我们所熟知的多少g和多少t为单位来衡量。
而是以P E T为计量单位,所以称之为大数据。
2、大数据的4V理论包括,多、乱、差、快。
其主要意思是数据量巨大,结构化,半结构化和非结构化数据乱。
沙里淘金价值密度低、。
实时获取需要的信息。
数据资产的评价包括颗粒度、规模活性、关联性维度准确性。
3、我们还学到了有关于啤酒和尿不湿的例子。
1970年,在美国的超市出现了有趣的现象,没到周末,啤酒和尿不湿的销量都有所增加,经济学家通过调研、数据采集及分析后,发现基本上购买者为25-35岁的青年已婚男性,原因是有车的美国家庭一般都有周末郊游的习惯,家庭主妇一般会让丈夫在周末采购尿不湿,以便周末孩子外出郊游时使用,得出结论,当超市把尿不湿和啤酒放在一起以便于顾客发现时,两者的销量都会增长,这就是组合销售的概念。
24、我们还学到了区块链的定义。
区块链是分布式数据存储、点对点传输、共识机制、加密算法等计算机技术的新型应用模式。
区块链(Blockchain),是比特币的一个重要概念,它本质上是一个去中心化的数据库。
北航CATIA大作业实验报告

CATIA大作业实验报告固体火箭发动机设计院(系)名称专业名称学生信息2015年12月17日表1 固体火箭发动机小组成员完成作业情况表一、研究背景航天技术是20世纪人类认识宇宙和改造自然进程中最有创新活力、最有开拓影响的高新技术领域,也是人类文明进步的重要标志。
众所周知,火箭发动机是导弹、运载火箭和航天器的心脏;是导弹、运载火箭和航天器得以迅速发展的前提;是航天技术发展的重要组成部分。
而现阶段用作运载的火箭发动机主要分为固体火箭发动机和液体火箭发动机两种。
相对于液体火箭发动机,固体火箭发动机具有结构简单,推进剂密度大,推进剂可以储存在燃烧到中常备待用和操纵方便可靠等优点。
固体火箭发动机由药柱、燃烧室、喷管组件和点火装置等组成。
药柱是由推进剂与少量添加剂制成的中空圆柱体(中空部分为燃烧面,其横截面形状有圆形、星形等)。
药柱置于燃烧室(一般即为发动机壳体)中。
在推进剂燃烧时,燃烧室须承受2500~3500度的高温和102~2×107帕的高压力,所以须用高强度合金钢、钛合金或复合材料制造,并在药柱与燃烧内壁间装备隔热衬。
点火装置用于点燃药柱,通常由电发火管和火药盒(装黑火药或烟火剂)组成。
通电后由电热丝点燃黑火药,再由黑火药点火燃药拄。
喷管除使燃气膨胀加速产生推力外,为了控制推力方向,常与推力向量控制系统组成喷管组件。
该系统能改变燃气喷射角度,从而实现推力方向的改变。
药柱燃烧完毕,发动机便停止工作。
而它主要用作火箭弹、导弹和探空火箭的发动机,以及航天器发射和飞机起飞的助推发动机。
结合本专业布置了设计固体火箭发动机的任务和CATIA大作业,宇航学院航空宇航推进理论与工程的两名学生通过分工合作完成此次课题任务。
其中,根据所学知识,自行设定目标参数。
根据拟定的参数,对固体火箭发动机推力室进行设计作图。
时间如有剩余,将对固体火箭发动机推力室的工作状况进行数值模拟,检测相关参数是否达到设计要求。
二、设计目标本次设计对象为固体火箭发动机为地空导弹助推器,工作时间很短,仅为3~4.3s,而推力需求为6~10吨级,属于典型的短时大推力发动机,故应用大燃面装配药柱设计;使用温度为50C o;已知推进剂为SFM—3,要求燃烧室外径D≤0.654m,发动机总长L≤2.59m,故要求发动机的结构尽量紧凑。
北航数值分析报告大作业第三题(fortran)

北航数值分析报告大作业第三题(fortran)“数值分析“计算实习大作业第三题——SY1415215孔维鹏一、计算说明1、将x i=0.08i,y j=0.5+0.05j分别代入方程组(A.3)得到关于t,u,v,w的的方程组,调用离散牛顿迭代子函数求出与x i,y j对应的t i,u j。
2、调用分片二次代数插值子函数在点(t i,u j)处插值得到z(x i,y j)=f(x i,y j),得到数表(x i,y j,f(x i,y j))。
3、对于k=1,2,3,4?,分别调用最小二乘拟合子函数计算系数矩阵c rs 及误差σ,直到满足精度,即求得最小的k值及系数矩阵c rs。
4、将x i?=0.1i,y j?=0.5+0.2j分别代入方程组(A.3)得到关于t?,u?,v?,w?的的方程组,调用离散牛顿迭代子函数求出与x i?,y j?对应的t i?,u j?,调用分片二次代数插值子函数在点(t i?,u j?)处插值得到z?(x i?,y j?)=f(x i?,y j?);调用步骤3中求得的系数矩阵c rs求得p(x i?,y j?),打印数表(x i?,y j?,f(x i?,y j?),p(x i?,y j?))。
二、源程序(FORTRAN)PROGRAM SY1415215DIMENSIONX(11),Y(21),T(6),U(6),Z(6,6),UX(11,21),TY(11,21),FXY(11,21), C(6,6) DIMENSIONX1(8),Y1(5),FXY1(8,5),PXY1(8,5),UX1(8,5),TY1(8,5)REAL(8) X,Y,T,U,Z,FXY,UX,TY,C,E,X1,Y1,FXY1,PXY1,UX1,TY1OPEN (1,FILE='第三题计算结果.TXT')DO I=1,11X(I)=0.08*(I-1)ENDDODO I=1,21Y(I)=0.5+0.05*(I-1)ENDDO!*****求解非线性方程组,得到z=f(t,u)的函数*******DO I=1,11DO J=1,21CALL DISNEWTON_NONLINEAR(X(I),Y(J),UX(I,J),TY(I,J)) ENDDO ENDDO!*************分片二次插值得到z=f(x,y)***********DO I=1,11DO J=1,21CALL INTERPOLATION(UX(I,J),TY(I,J),FXY(I,J))ENDDO ENDDOWRITE (1,"('数表(x,y,f(x,y)):')")WRITE (1,"(3X,'X',7X,'Y',10X,'F(X,Y)')")DO I=1,11DO J=1,21WRITE(1,'(1X,F5.2,2X,F5.3,2X,E20.13)') X(I),Y(J),FXY(I,J) ENDDOWRITE (1,"('')")ENDDO!***********最小二乘拟合得到P(x,y)**************N=11M=21WRITE (1,'(" ","K和σ分别为:")')DO K=1,20CALL LSFITTING(X,Y,FXY,C,N,M,K,K,E) WRITE (1,'(I3,2X,E20.13)') K-1,EIF(ETA).OR.(A(L,K)==TA)) THENTA=A(L,K)TL=LDO J=K,NT(K,J)=A(K,J)A(K,J)=A(TL,J)A(TL,J)=T(K,J)ENDDOTB(K)=B(K)B(K)=B(TL)B(TL)=TB(K)ENDIF ENDDODO I=K+1,NM(I,K)=A(I,K)/A(K,K)A(I,K)=0DO J=K+1,NA(I,J)=A(I,J)-M(I,K)*A(K,J) ENDDOB(I)=B(I)-M(I,K)*B(K)ENDDOENDDO!回代过程X(N)=B(N)/A(N,N)DO K=N-1,1,-1S=0.0DO J=K+1,NS=S+A(K,J)*X(J)ENDDOX(K)=(B(K)-S)/A(K,K)ENDDORETURNEND!***********求向量的无穷数************ SUBROUTINE NORM(X,N,A) DIMENSION X(N)REAL(8) X,AA=ABS(X(1))DO I=2,NIF(ABS(X(I))>ABS(X(I-1))) THENA=ABS(X(I)) ENDIFENDDORETURNEND!**************分片二次代数插值************** SUBROUTINE INTERPOLATION(U,V,W) PARAMETER (N=6,M=6)DIMENSION X(N),Y(M),Z(M,N),LK(3),LR(3)REAL(8) X,Y,Z,H,TREAL(8) U,V,W,LK,LR !U,V分别为插值点处的坐标,W为插值结果INTEGER R!**********************数据赋值********************** DATA Y/0.0,0.2,0.4,0.6,0.8,1.0/DATA X/0.0,0.4,0.8,1.2,1.6,2.0/DATA Z/-0.5,-0.42,-0.18,0.22,0.78,1.5,&&-0.34,-0.5,-0.5,-0.34,-0.02,0.46,&&0.14,-0.26,-0.5,-0.58,-0.5,-0.26,&&0.94,0.3,-0.18,-0.5,-0.66,-0.66,&&2.06,1.18,0.46,-0.1,-0.5,-0.74,&&3.5,2.38,1.42,0.62,-0.02,-0.5/H=0.4T=0.2!******************计算K,R************************* IF(UX(N-1)-H/2) THENK=N-1ELSEDO I=3,N-2IF((U>X(I)-H/2).AND.(UY(M-1)-T/2) THENR=M-1 ELSEDO J=3,M-2IF((V>Y(J)-T/2).AND.(VN) P=N IF(P>20) P=20IF(Q>M) Q=MIF(Q>20) Q=20XX=0YY=0D1=NAPX(1)=0.0DO I=1,NAPX(1)=APX(1)+X(I)ENDDOAPX(1)=APX(1)/D1DO J=1,MV(1,J)=0.0DO I=1,NV(1,J)=V(1,J)+Z(I,J)ENDDOV(1,J)=V(1,J)/D1ENDDOIF(P>1) THEND2=0.0APX(2)=0.0DO I=1,NG=X(I)-APX(1)D2=D2+G*GAPX(2)=APX(2)+(X(I)-XX)*G*G ENDDO APX(2)=APX(2)/D2BX(2)=D2/D1DO J=1,MV(2,J)=0.0DO I=1,NG=X(I)-APX(1)V(2,J)=V(2,J)+Z(I,J)*G ENDDOV(2,J)=V(2,J)/D2ENDDOD1=D2ENDIFDO K=3,PD2=0.0APX(K)=0.0DO J=1,MV(K,J)=0.0ENDDODO I=1,NG1=1.0G2=X(I)-APX(1)DO J=3,KG=(X(I)-APX(J-1))*G2-BX(J-1)*G1 G1=G2 G2=GENDDOD2=D2+G*GAPX(K)=APX(K)+X(I)*G*GDO J=1,M V(K,J)=V(K,J)+Z(I,J)*G ENDDOENDDODO J=1,MV(K,J)=V(K,J)/D2ENDDOAPX(K)=APX(K)/D2BX(K)=D2/D1D1=D2ENDDOD1=MAPY(1)=0.0DO I=1,MAPY(1)=APY(1)+Y(I)ENDDOAPY(1)=APY(1)/D1DO J=1,PU(J,1)=0.0DO I=1,MU(J,1)=U(J,1)+V(J,I) ENDDO U(J,1)=U(J,1)/D1ENDDOIF(Q>1)THEND2=0.0APY(2)=0.0DO I=1,MG=Y(I)-APY(1)D2=D2+G*G APY(2)=APY(2)+(Y(I))*G*G ENDDO APY(2)=APY(2)/D2BY(2)=D2/D1DO J=1,PU(J,2)=0.0DO I=1,MG=Y(I)-APY(1)U(J,2)=U(J,2)+V(J,I)*GENDDOU(J,2)=U(J,2)/D2ENDDOD1=D2ENDIFDO K=3,QD2=0.0APY(K)=0.0DO J=1,PU(J,K)=0.0ENDDODO I=1,MG1=1.0G2=Y(I)-APY(1)DO J=3,KG=(Y(I)-APY(J-1))*G2-BY(J-1)*G1 G1=G2 G2=GENDDOD2=D2+G*GAPY(K)=APY(K)+Y(I)*G*G DO J=1,PU(J,K)=U(J,K)+V(J,I)*G ENDDOENDDODO J=1,PU(J,K)=U(J,K)/D2ENDDOAPY(K)=APY(K)/D2BY(K)=D2/D1D1=D2ENDDOV(1,1)=1.0V(2,1)=-APY(1)V(2,2)=1.0DO I=1,PDO J=1,QA(I,J)=0.0ENDDOENDDODO I=3,QV(I,I)=V(I-1,I-1)V(I,I-1)=-APY(I-1)*V(I-1,I-1)+V(I-1,I-2)IF(I>=4) THENDO K=I-2,2,-1V(I,K)=-APY(I-1)*V(I-1,K)+V(I-1,K-1)-BY(I-1)*V(I-2,K) ENDDO ENDIFV(I,1)=-APY(I-1)*V(I-1,1)-BY(I-1)*V(I-2,1)ENDDO DO I=1,PIF(I==1) THENT(1)=1.0T1(1)=1.0ELSEIF(I==2) THENT(1)=-APX(1)T(2)=1.0T2(1)=T(1)T2(2)=T(2)ELSET(I)=T2(I-1)T(I-1)=-APX(I-1)*T2(I-1)+T2(I-2) IF(I>=4) THENDO K=I-2,2,-1T(K)=-APX(I-1)*T2(K)+T2(K-1)-BX(I-1)*T1(K) ENDDOENDIFT(1)=-APX(I-1)*T2(1)-BX(I-1)*T1(1)T2(I)=T(I)DO K=I-1,1,-1T1(K)=T2(K)T2(K)=T(K)ENDDOENDIFDO J=1,QDO K=I,1,-1DO L=J,1,-1A(K,L)=A(K,L)+U(I,J)*T(K)*V(J,L) ENDDOENDDOENDDOENDDODT1=0.0DO I=1,NX1=X(I)DO J=1,MY1=Y(J)X2=1.0DD=0.0DO K=1,PG=A(K,Q)DO KK=Q-1,1,-1G=G*Y1+A(K,KK)ENDDOG=G*X2DD=DD+GX2=X2*X1ENDDODT=DD-Z(I,J)DT1=DT1+DT*DTENDDOENDDORETURNEND三、计算结果数表(x,y,f(x,y)): X Y UX TY F(X,Y) 0.00 0.500 1.345 0.243 0.17E+000.00 0.550 1.322 0.269 0.66E+000.00 0.600 1.299 0.295 0.35E+000.00 0.650 1.277 0.322 0.94E+000.00 0.700 1.255 0.350 0.30E-020.00 0.750 1.235 0.377 -0.87E-010.00 0.800 1.215 0.406 -0.58E+000.00 0.850 1.196 0.434 -0.72E+000.00 0.900 1.177 0.463 -0.54E+000.00 0.950 1.159 0.492 -0.86E+000.00 1.050 1.125 0.550 -0.74E+00 0.00 1.100 1.109 0.580 -0.06E+00 0.00 1.150 1.093 0.609 -0.00E+00 0.00 1.200 1.0790.639 -0.18E+00 0.00 1.250 1.064 0.669 -0.52E+00 0.00 1.3001.050 0.699 -0.19E+00 0.00 1.350 1.037 0.729 -0.48E+00 0.001.400 1.024 0.759 -0.68E+00 0.00 1.450 1.011 0.790 -0.52E+00 0.00 1.500 1.000 0.820 -0.29E+000.08 0.500 1.415 0.228 0.67E+00 0.08 0.550 1.391 0.253 0.08E+00 0.08 0.600 1.368 0.279 0.02E+00 0.08 0.650 1.346 0.306 0.47E+00 0.08 0.700 1.325 0.333 0.57E+00 0.08 0.750 1.304 0.360 0.48E-01 0.08 0.800 1.284 0.388 -0.73E-01 0.08 0.850 1.265 0.416 -0.16E+00 0.08 0.900 1.246 0.444 -0.29E+00 0.08 0.950 1.229 0.473 -0.36E+00 0.08 1.000 1.211 0.502 -0.08E+00 0.08 1.050 1.194 0.531 -0.29E+00 0.08 1.100 1.178 0.560 -0.78E+00 0.08 1.150 1.163 0.589 -0.93E+00 0.08 1.200 1.148 0.619 -0.44E+00 0.08 1.250 1.133 0.649 -0.92E+00 0.08 1.300 1.119 0.679 -0.71E+000.08 1.400 1.093 0.739 -0.37E+00 0.08 1.450 1.080 0.769-0.83E+00 0.08 1.500 1.068 0.799 -0.92E+000.16 0.500 1.483 0.214 0.31E+00 0.16 0.550 1.460 0.239 0.64E+00 0.16 0.600 1.437 0.264 0.91E+00 0.16 0.650 1.414 0.290 0.06E+00 0.16 0.700 1.393 0.316 0.70E+00 0.16 0.750 1.372 0.343 0.59E+00 0.16 0.800 1.352 0.370 0.12E+00 0.16 0.850 1.333 0.398 0.77E-02 0.16 0.900 1.315 0.426 -0.83E-01 0.16 0.950 1.297 0.454-0.58E+00 0.16 1.000 1.279 0.483 -0.20E+00 0.16 1.050 1.2620.512 -0.11E+00 0.16 1.100 1.246 0.541 -0.74E+00 0.16 1.1501.231 0.570 -0.09E+00 0.16 1.200 1.216 0.600 -0.59E+00 0.16 1.250 1.201 0.629 -0.66E+00 0.16 1.300 1.187 0.659 -0.71E+00 0.16 1.350 1.174 0.689 -0.32E+00 0.16 1.400 1.161 0.718-0.56E+00 0.16 1.450 1.148 0.748 -0.31E+00 0.16 1.500 1.136 0.778 -0.75E+000.24 0.500 1.551 0.201 0.66E+01 0.24 0.550 1.527 0.2250.03E+000.24 0.650 1.482 0.275 0.64E+00 0.24 0.700 1.460 0.3010.47E+00 0.24 0.750 1.439 0.327 0.34E+00 0.24 0.800 1.419 0.354 0.24E+00 0.24 0.850 1.400 0.381 0.69E+00 0.24 0.900 1.381 0.409 0.04E-01 0.24 0.950 1.363 0.437 -0.42E-01 0.24 1.000 1.346 0.465 -0.06E+00 0.24 1.050 1.329 0.494 -0.59E+00 0.24 1.100 1.313 0.523 -0.83E+00 0.24 1.150 1.297 0.552 -0.15E+00 0.24 1.200 1.282 0.581 -0.19E+00 0.24 1.250 1.267 0.610 -0.84E+00 0.24 1.300 1.253 0.640 -0.66E+00 0.24 1.350 1.240 0.669 -0.30E+00 0.24 1.400 1.227 0.699 -0.86E+00 0.24 1.450 1.214 0.729 -0.84E+00 0.24 1.500 1.202 0.759 -0.77E+000.32 0.500 1.617 0.188 0.28E+01 0.32 0.550 1.593 0.212 0.49E+01 0.32 0.600 1.570 0.236 0.68E+00 0.32 0.650 1.547 0.261 0.75E+00 0.32 0.700 1.526 0.286 0.60E+00 0.32 0.750 1.505 0.312 0.77E+00 0.32 0.800 1.485 0.339 0.05E+00 0.32 0.850 1.466 0.365 0.99E+00 0.32 0.900 1.447 0.393 0.27E+00 0.32 1.000 1.411 0.448 -0.01E-02 0.32 1.050 1.395 0.477-0.41E-01 0.32 1.100 1.378 0.505 -0.18E+00 0.32 1.150 1.3630.534 -0.25E+00 0.32 1.200 1.347 0.563 -0.29E+00 0.32 1.2501.333 0.592 -0.90E+00 0.32 1.300 1.319 0.621 -0.00E+00 0.32 1.350 1.305 0.650 -0.40E+00 0.32 1.400 1.292 0.680 -0.54E+00 0.32 1.450 1.279 0.710 -0.79E+00 0.32 1.500 1.267 0.739-0.91E+000.40 0.500 1.681 0.177 0.91E+01 0.40 0.550 1.658 0.1990.00E+01 0.40 0.600 1.634 0.223 0.83E+01 0.40 0.650 1.612 0.247 0.02E+01 0.40 0.700 1.591 0.272 0.94E+00 0.40 0.750 1.570 0.298 0.49E+00 0.40 0.800 1.550 0.324 0.94E+00 0.40 0.850 1.530 0.350 0.40E+00 0.40 0.900 1.512 0.377 0.33E+00 0.40 0.950 1.493 0.405 0.99E+00 0.40 1.000 1.476 0.432 0.68E+00 0.40 1.050 1.459 0.460 0.08E-01 0.40 1.100 1.443 0.488 -0.84E-01 0.40 1.150 1.427 0.517-0.98E+00 0.40 1.200 1.412 0.545 -0.27E+00 0.40 1.250 1.397 0.574 -0.06E+000.40 1.350 1.369 0.632 -0.66E+00 0.40 1.400 1.356 0.662-0.37E+00 0.40 1.450 1.343 0.691 -0.43E+00 0.40 1.500 1.331 0.721 -0.12E+000.48 0.500 1.745 0.166 0.69E+01 0.48 0.550 1.721 0.188 0.02E+01 0.48 0.600 1.698 0.211 0.74E+01 0.48 0.650 1.676 0.235 0.40E+01 0.48 0.700 1.654 0.259 0.23E+01 0.48 0.750 1.634 0.284 0.56E+00 0.48 0.800 1.613 0.310 0.28E+00 0.48 0.850 1.594 0.336 0.49E+00 0.48 0.900 1.575 0.363 0.31E+00 0.48 0.950 1.557 0.390 0.66E+00 0.48 1.000 1.539 0.417 0.30E+00 0.48 1.050 1.522 0.444 0.34E+00 0.48 1.100 1.506 0.472 0.07E-01 0.48 1.150 1.490 0.500 -0.62E-01 0.48 1.200 1.475 0.529 -0.45E+00 0.48 1.250 1.460 0.557 -0.86E+00 0.48 1.300 1.446 0.586 -0.39E+00 0.48 1.350 1.432 0.615 -0.22E+00 0.48 1.400 1.419 0.644 -0.67E+00 0.48 1.450 1.406 0.674-0.55E+00 0.48 1.500 1.394 0.703 -0.14E+000.56 0.500 1.808 0.156 0.48E+010.56 0.600 1.761 0.200 0.10E+01 0.56 0.650 1.739 0.2230.68E+01 0.56 0.700 1.717 0.247 0.94E+01 0.56 0.750 1.696 0.272 0.33E+01 0.56 0.800 1.676 0.297 0.11E+00 0.56 0.850 1.657 0.323 0.63E+00 0.56 0.900 1.638 0.349 0.97E+00 0.56 0.950 1.620 0.375 0.52E+00 0.56 1.000 1.602 0.402 0.56E+00 0.56 1.050 1.585 0.429 0.47E+00 0.56 1.100 1.568 0.457 0.20E+00 0.56 1.150 1.552 0.485 0.13E+00 0.56 1.200 1.537 0.513 0.09E-01 0.56 1.250 1.522 0.541 -0.47E-01 0.56 1.300 1.508 0.570 -0.99E+00 0.56 1.350 1.4940.599 -0.82E+00 0.56 1.400 1.481 0.627 -0.26E+00 0.56 1.4501.468 0.657 -0.71E+00 0.56 1.500 1.455 0.686 -0.98E+000.64 0.500 1.870 0.147 0.74E+01 0.64 0.550 1.846 0.1680.10E+01 0.64 0.600 1.823 0.190 0.54E+01 0.64 0.650 1.801 0.213 0.42E+01 0.64 0.700 1.779 0.236 0.56E+01 0.64 0.750 1.758 0.260 0.03E+01 0.64 0.800 1.738 0.285 0.42E+01 0.64 0.850 1.718 0.310 0.41E+010.64 0.950 1.681 0.362 0.36E+00 0.64 1.000 1.664 0.388 0.18E+00 0.64 1.050 1.646 0.415 0.28E+00 0.64 1.100 1.630 0.443 0.07E+00 0.64 1.150 1.614 0.470 0.66E+00 0.64 1.200 1.598 0.498 0.09E+00 0.64 1.250 1.584 0.526 0.50E-01 0.64 1.300 1.569 0.554 -0.88E-01 0.64 1.350 1.555 0.583 -0.76E+00 0.64 1.400 1.542 0.611 -0.66E+00 0.64 1.450 1.529 0.640 -0.33E+00 0.64 1.500 1.516 0.669 -0.56E+00 0.72 0.500 1.931 0.139 0.94E+01 0.72 0.550 1.907 0.159 0.84E+01 0.72 0.600 1.884 0.181 0.36E+01 0.72 0.650 1.862 0.203 0.40E+01 0.72 0.700 1.840 0.226 0.47E+01 0.72 0.750 1.819 0.249 0.56E+01 0.72 0.800 1.799 0.273 0.19E+01 0.72 0.850 1.779 0.298 0.37E+01 0.72 0.900 1.760 0.323 0.86E+01 0.72 0.950 1.742 0.349 0.76E+00 0.72 1.000 1.724 0.375 0.24E+00 0.72 1.050 1.707 0.402 0.55E+00 0.72 1.100 1.691 0.429 0.97E+00 0.72 1.150 1.675 0.456 0.27E+00 0.72 1.200 1.659 0.484 0.31E+000.72 1.300 1.630 0.539 0.49E+00 0.72 1.350 1.616 0.5680.72E-02 0.72 1.400 1.602 0.596 -0.69E-01 0.72 1.450 1.589 0.625 -0.67E+00 0.72 1.500 1.576 0.653 -0.20E+000.80 0.500 1.992 0.131 0.31E+01 0.80 0.550 1.968 0.1510.44E+01 0.80 0.600 1.945 0.172 0.41E+01 0.80 0.650 1.922 0.193 0.45E+01 0.80 0.700 1.900 0.216 0.00E+01 0.80 0.750 1.879 0.239 0.10E+01 0.80 0.800 1.859 0.263 0.16E+01 0.80 0.850 1.840 0.287 0.52E+01 0.80 0.900 1.821 0.312 0.02E+01 0.80 0.950 1.802 0.337 0.38E+01 0.80 1.000 1.784 0.363 0.89E+01 0.80 1.050 1.767 0.389 0.28E+00 0.80 1.100 1.751 0.416 0.09E+00 0.80 1.150 1.734 0.4430.23E+00 0.80 1.200 1.719 0.470 0.93E+00 0.80 1.250 1.704 0.498 0.15E+00 0.80 1.300 1.689 0.525 0.86E+00 0.80 1.350 1.675 0.553 0.64E+00 0.80 1.400 1.662 0.582 0.74E-01 0.80 1.450 1.649 0.610 -0.37E-01 0.80 1.500 1.636 0.638 -0.81E+00K和σ分别为:0 0.93E+031 0.61E+012 0.92E-023 0.53E-034 0.16E-055 0.77E-07系数矩阵Crs(按行)为:0.00E+01 -0.83E+01 0.56E+00 0.97E+00 -0.03E+00 0.70E-010.91E+01 -0.99E+00 -0.96E+01 0.17E+01 -0.66E+00 0.10E-01 0.77E+00 0.42E+01 -0.10E+00 -0.81E+00 0.81E+00 -0.62E-01-0.25E+00 -0.21E+00 0.97E+00 -0.18E+00 0.49E+00 -0.63E-010.34E+00 -0.56E+00 0.69E-01 0.51E+00 -0.77E-01 0.27E-01-0.94E-01 0.94E+00 -0.58E+00 0.69E-01 -0.50E-01 0.53E-02 数表(x,y,f(x,y),p(x,y)):X Y F(X,Y) P(X,Y)0.100 0.700 0.58E+00 0.05E+000.100 1.100 -0.66E+00 -0.26E+00 0.100 1.300 -0.68E+00-0.31E+00 0.100 1.500 -0.52E+00 -0.49E+000.200 0.700 0.54E+00 0.19E+00 0.200 0.900 -0.63E-01 -0.65E-01 0.200 1.100 -0.90E+00 -0.90E+00 0.200 1.300 -0.84E+00 -0.90E+00 0.200 1.500 -0.03E+00 -0.04E+000.300 0.700 0.82E+00 0.09E+00 0.300 0.900 0.48E+00 0.11E+00 0.300 1.100 -0.63E+00 -0.88E+00 0.300 1.300 -0.72E+00 -0.96E+00 0.300 1.500 -0.34E+00 -0.84E+000.400 0.700 0.79E+00 0.89E+00 0.400 0.900 0.56E+00 0.63E+00 0.400 1.100 -0.83E-01 -0.04E-01 0.400 1.300 -0.72E+00 -0.71E+00 0.400 1.500 -0.85E+00 -0.07E+000.500 0.700 0.56E+01 0.92E+01 0.500 0.900 0.51E+00 0.23E+00 0.500 1.100 0.59E+00 0.27E+00 0.500 1.300 -0.53E+00 -0.11E+00 0.500 1.500 -0.67E+00 -0.33E+000.600 0.900 0.14E+00 0.75E+00 0.600 1.100 0.19E+00 0.32E+00 0.600 1.300 -0.70E-01 -0.82E-01 0.600 1.500 -0.08E+00 -0.75E+00 0.700 0.700 0.89E+01 0.29E+01 0.700 0.900 0.91E+01 0.11E+010.700 1.100 0.60E+00 0.97E+00 0.700 1.300 0.22E-01 0.06E-01 0.7001.500 -0.53E+00 -0.80E+00 0.800 0.700 0.09E+01 0.06E+01 0.800 0.900 0.32E+01 0.50E+01 0.800 1.100 0.03E+00 0.79E+00 0.800 1.300 0.25E+00 0.50E+00 0.800 1.500 -0.14E+00 -0.28E+00。
北航计算机控制系统大作业

计算机控制系统大作业姓名:陈启航学号: 教师:周锐 日期:2016年6月1日综合习题1已知: 44)(+=s s D , 1) 试用 Z 变换、一阶向后差分、向前差分、零极点匹配、Tustin 变换和预修正的Tustin (设关键频率=4)变换等方法将D(s)离散化,采样周期分别取为0.1s 和 0.4s ;2) 将 D(z)的零极点标在Z 平面图上 3) 计算D (j )和各个D( )的幅频和相频特性并绘图,w 由0~ 20ra d ,计算40 个点,应包括=4 点,每个T 绘一张图(Z 变换方法单画)4) 计算 D(s)及T=0.1,T=0.4 时D(z)的单位脉冲响应,运行时间为4 秒5) 结合所得的结果讨论分析各种离散化方法的特点 6) 写出报告,附上结果。
解:(1) Z 变换法:a.离散化: 时,;时,;b. 的零极点c. 和 幅频相频特性曲线 连续系统:时时d.和单位脉冲响应单位脉冲响应:单位脉冲响应:时时(2)各种离散化方法:a.离散化后的1、一阶向后差分:时时2、一阶向前差分:时时3、零极点匹配时时4、Tustin变换时时5、预修正的Tustin变换(设关键频率=4)时时b.的零极点1、一阶向后差分2、一阶向前差分3、零极点匹配4、Tustin变换5、预修正的Tustin变换(设关键频率=4)c.和幅频相频特性曲线1、一阶向后差分时时2、一阶向前差分时时3、零极点匹配时时4、Tustin变换时时5、预修正的Tustin变换(设关键频率=4)时时d.和单位脉冲响应1、一阶向后差分时时2、一阶向前差分时时3、零极点匹配时时4、Tustin变换时时5、预修正的Tustin变换(设关键频率=4)时时二、实验结果分析和总结:在本题中,当采样周期T=0.4s时所有离散方法的都会出现频率混叠现象,使得采样信号失真。
因为此采样周期不满足采样定理导致采样信号失真现象。
当满足采样定理时,各种离散化方法的特点如下:①Z变换法由Z变换的脉冲响应可看出,连续系统与离散后的系统的脉冲响应相同,故其可以应用在要求脉冲响应不变的场合。
北航大型通用软件
航空科学与工程学院《航空工程大型通用软件应用》大作业组号47小组成员11051165 王海涛11051196 张彧11051210 杜酉昌11051217 郭皓11051218 张启冬2014年6月小组成员分工表目录1.Catia部分 (3)1.1.作业要求: (3)1.2.作业报告: .............................................. 错误!未定义书签。
2.Fluent部分 (3)2.1.作业要求: (4)2.2.作业报告: .............................................. 错误!未定义书签。
3.Ansys部分......................................................... 错误!未定义书签。
3.1.作业要求: (7)3.2.作业报告: .............................................. 错误!未定义书签。
4.Matlab部分 ....................................................... 错误!未定义书签。
4.1.作业要求: .............................................. 错误!未定义书签。
4.2.作业报告: .............................................. 错误!未定义书签。
1.Catia部分:1.1作业要求:1、用提供的翼型数据,生成翼型曲线;2、参考所给的机翼图例,使用参数化设计,参数为:翼根弦长=495mm、翼中弦长=270mm、翼尖弦长=150mm、内翼展长=525mm、外翼展长=800mm、内翼后掠角=10度、外翼后掠角=10度翼尖不要求倒圆,最后在Part设计环境中生成实心体机翼(不是曲面);3、在工程图环境中生成三视图,并标注尺寸;4、上述三维模型和工程图分别截图插入word文档的Catia部分;最后提交作业时,part文件和word报告一起提交。
北航惯导第一次大作业
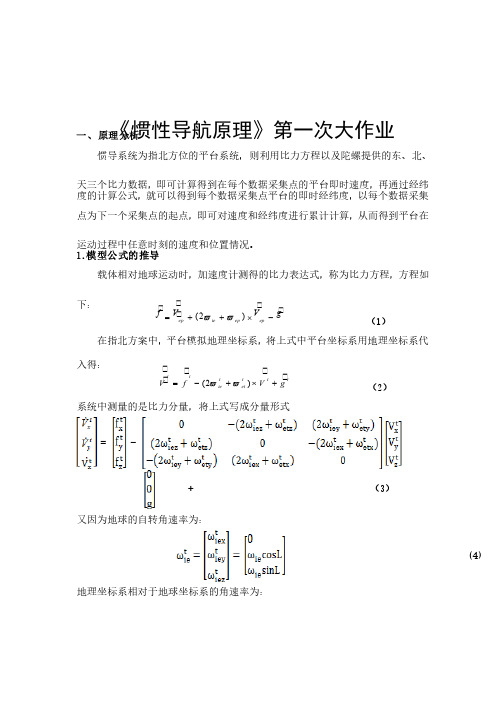
《惯性导航原理》第一次大作业一、 原理分析惯导系统为指北方位的平台系统,则利用比力方程以及陀螺提供的东、北、天三个比力数据,即可计算得到在每个数据采集点的平台即时速度,再通过经纬度的计算公式,就可以得到每个数据采集点平台的即时经纬度,以每个数据采集点为下一个采集点的起点,即可对速度和经纬度进行累计计算,从而得到平台在运动过程中任意时刻的速度和位置情况。
运动过程中任意时刻的速度和位置情况。
1.模型公式的推导载体相对地球运动时,载体相对地球运动时,加速度计测得的比力表达式,加速度计测得的比力表达式,加速度计测得的比力表达式,称为比力方程,称为比力方程,称为比力方程,方程如方程如下:下:g V V f epep ieep-´++=)2(vv (1)在指北方案中,平台模拟地理坐标系,将上式中平台坐标系用地理坐标系代入得:入得:t tt ett iettgV f V+´+-=)2(v v (2)系统中测量的是比力分量,将上式写成分量形式系统中测量的是比力分量,将上式写成分量形式=-+ (3) 又因为地球的自转角速率为:又因为地球的自转角速率为:(4)地理坐标系相对于地球坐标系的角速率为:地理坐标系相对于地球坐标系的角速率为:= (5)将(将(44)(5)两个式子带入()两个式子带入(33)式,即可得到如下方程组:)式,即可得到如下方程组:(6)2.速度计算作业要求只考虑水平通道,作业要求只考虑水平通道,因此只需要计算正东、因此只需要计算正东、因此只需要计算正东、正北两个方向的速度即可。
正北两个方向的速度即可。
正北两个方向的速度即可。
理理论上计算得到t x V 、t y V 后,再积分一次可得到速度值,即后,再积分一次可得到速度值,即ïîïíì+=+=òòt t y t y t ytt x t x tx V dt V V V dt V V 000但在本次计算过程中,三个方向的速度均是从零开始在各时间节点上的累加,并不是t的函数,因此速度计算可以由以下方程组实现:(7)此方程组表示了从第i 个采集点到第(个采集点到第(i+1i+1i+1)个采集点的速度递推公式。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
航空科学与工程学院
《航空工程大型通用软件应用》大作业
机翼结构设计与分析
组号第3组
小组成员11051090 赵雅甜
11051093 廉佳
11051100 王守财
11051108 刘哲
11051135 张雄健
11051136 姜南
6月
目录
一 CATIA部分....................................... 错误!未定义书签。
( 一) 作业要求..................................... 错误!未定义书签。
( 二) 作业报告..................................... 错误!未定义书签。
1、三维模型图................................... 错误!未定义书签。
2、工程图....................................... 错误!未定义书签。
二 FLUENT部分...................................... 错误!未定义书签。
( 一) 作业要求..................................... 错误!未定义书签。
( 二) 作业报告..................................... 错误!未定义书签。
1、计算方法和流程............................... 错误!未定义书签。
2、网格分布图................................... 错误!未定义书签。
3、气动力系数................................... 错误!未定义书签。
4、翼型表面压力曲线............................. 错误!未定义书签。
5、翼型周围压力云图............................. 错误!未定义书签。
6、翼型周围x方向速度云图....................... 错误!未定义书签。
7、翼型周围y方向速度云图....................... 错误!未定义书签。
8、翼型周围x方向速度矢量图..................... 错误!未定义书签。
9、翼型周围y方向速度矢量图..................... 错误!未定义书签。
10、流线图...................................... 错误!未定义书签。
三 ANSYS部分....................................... 错误!未定义书签。
( 一) 作业要求..................................... 错误!未定义书签。
( 二) 作业报告..................................... 错误!未定义书签。
1、机翼按第一强度理论计算的应力云图............. 错误!未定义书签。
2、机翼按第二强度理论计算的应力云图............. 错误!未定义书签。
3、机翼按第三强度理论计算的应力云图............. 错误!未定义书签。
4、机翼按第四强度理论计算的应力云图............. 错误!未定义书签。
5、机翼变形图................................... 错误!未定义书签。
6、由翼根到翼尖某一路径挠度变化规律............. 错误!未定义书签。
7、由翼根到翼尖某一路径应力分布规律............. 错误!未定义书签。
8、机翼前5阶固有振动频率....................... 错误!未定义书签。
9、机翼第1阶振动模态........................... 错误!未定义书签。
10、机翼第2阶振动模态.......................... 错误!未定义书签。
11、机翼第3阶振动模态.......................... 错误!未定义书签。
12、机翼第4阶振动模态.......................... 错误!未定义书签。
13、机翼第5阶振动模态.......................... 错误!未定义书签。
14、命令流...................................... 错误!未定义书签。
四 MATLAB部分...................................... 错误!未定义书签。
( 一) 作业要求..................................... 错误!未定义书签。
( 二) 作业报告..................................... 错误!未定义书签。
1、计算方法..................................... 错误!未定义书签。
2、翼型外形压力系数分布图....................... 错误!未定义书签。
3、计算结果..................................... 错误!未定义书签。
4、计算程序..................................... 错误!未定义书签。
一 CATIA部分
( 一) 作业要求
1、用每组的翼型数据, 生成翼型曲线;
2、参考所给的机翼图例, 使用参数化设计, 参数为:
翼根弦长=450mm、翼中弦长=270mm、翼尖弦长=150mm、
内翼展长=525mm、外翼展长=850mm、
内翼后掠角=10度、外翼后掠角=10度
3、翼尖不要求倒圆, 在零件设计中生成实心体机翼( 不是曲面) ;
4、在工程图环境中生成三视图, 并标注尺寸;
5、上述三维模型和工程图分别截图插入word文档的Catia部分; 最后提交作业时, part文件和word报告一起提交。
6、生成的Catia实体机翼模型会在后续软件作业中使用。
( 二) 作业报告
1、三维模型图
图1 三维模型图1。