机械原理大作业
机械原理大作业1(连杆机构)27题
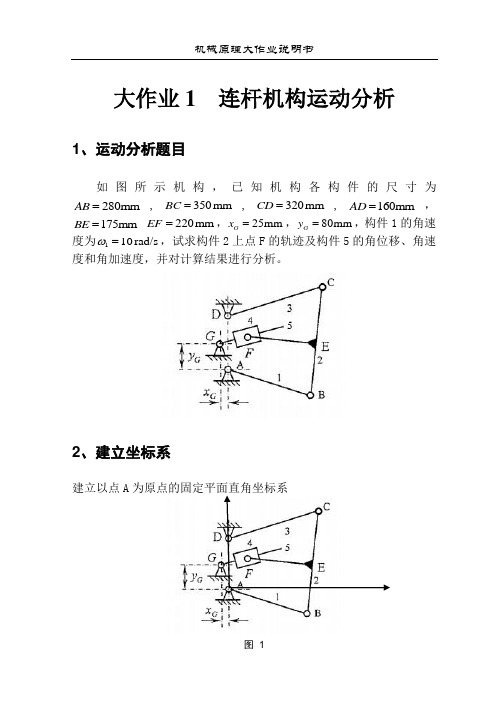
3)已知F点和G点的运动参数可求出杆5的角位移、角速度、角加速度。
6、
1)F点的运动参数
图8点F的运动轨迹
图9点F的x坐标和y坐标随杆AB角位移的变化
图10点F的速度在x和y方向的分量随杆AB的角位移的变化
xc=ones(1,3601);%给点Cx坐标赋初值
yc=ones(1,3601);%给点Cy坐标赋初值
ci=ones(1,3601);%给中间变量赋初值
cj=ones(1,3601);%给中间变量赋初值
wi=ones(1,3601);%给杆BC的角速度赋初值
wj=ones(1,3601);%给杆CD的角速度赋初值
axb=-w*w*xb;%点B的加速度在x方向的分量
ayb=-w*w*yb;%点B的加速度在y方向的分量
xd=0;%点D的x坐标
yd=160;%点D的y坐标
vxd=0;%点D的速度在x方向的分量
vyd=0;%点D的速度在y方向的分量
axd=0;%点D的加速度在x方向的分量
ayd=0;%点D的加速度在y方向的分量
1)位置方程
为求解上式,应先求出 或 ,将上式移相后分别平方相加,消去 得
式中:
其中, 。
为保证机构的装配,必须同时满足
和
解三角方程式 可求得
上式中,“+”表示B、C、D三个运动副为顺时针排列;“—”表示B、C、D为逆时针排列。
将 代入 中可求得 ,而后即可求得
2)速度方程
将式 对时间求导可得两杆的角速度 为
elseif lbd(1,m)==(li+lj)
哈工大机械原理大作业——齿轮——1号
Harbin Institute of Technology机械原理大作业3课程名称:机械原理设计题目:齿轮传动设计哈尔滨工业大学一、设计题目:如下图一个机械传动系统,运动运动由电动机1输入,经过机械传动系变速后由圆锥齿轮16输出三种不同转速。
选择一组传动系统的原始参数,据此设计该传动系统。
序号电机转速〔r/min〕输出轴转速〔r/min〕带传动最大传动比滑移齿轮传动定轴齿轮传动最大传动比模数圆柱齿轮圆锥齿轮一对齿轮最大传动比模数一对齿轮最大传动比模数7 1450 17 23 30 ≤2.8 ≤4.5 2 ≤4.5 3 ≤4 3二、传动比的分配计算:电动机转速n=1450r/min,输出转速n1=17r/min,n2=23 r/min,n3=30 r/min,带传动的最大传动比=2.8,滑移齿轮传动的最大传动比=4.5,圆柱齿轮传动的最大传动比=4.5,圆锥齿轮最大传动比=4。
根据传动系统的原始参数可知,传动系统的总传动比为:i1=1450/30=48.333i2=1450/23=63.043i3=1450/17=85.294传动系统的总传动比由带传动、滑移齿轮传动和定轴齿轮传动三局部实现。
设带传动的传动比为ipmax =2.8,滑移齿轮的传动比为iv1,iv2和iv3,令iv3=ivmax=4.5,那么定轴的传动比为if =85.294/(4.5*2.8)=6.769,从而iv1=48.333/〔6.769*2.8〕=2.550,iv2=3.326。
定轴齿轮每对的传动比为id==1.89。
三、滑移齿轮变速传动中每对齿轮的几何尺寸及重合度:经过计算、比拟,确定出三对滑移齿轮的齿数,其分别为:z5=17,z6=44,z 7=14,z8=47,z9=11,z10=50。
变位系数确实定:x5=x6=0; x7≥ha*(17-14)/17=0.176,取x7=0.18,x8=-0.18;x9≥ha*(17-11)/17=0.353,取x9=0.36;x10=-0.36。
机械原理大作业(平面六杆机构的运动分析)
a[3][1]=L[3]*cos((*p).theta[2]);
a[3][2]=L[5]*cos((*p).theta[3]);
a[3][3]=-L[6]*cos((*p).theta[4]);
b[0]=L[2]*cos((*p).theta[1])*(*p).w[0]*(*p).w[0]-L[3]*cos((*p).theta[2])*(*p).w[1]*(*p).w[1]+w1*w1*L[1]*cos((*p).theta[0]);
a[2][2]=-L[5]*sin((*p).theta[3]);
a[2][3]=L[6]*sin((*p).theta[4]);
a[3][0]=L[0]*cos((*p).theta[1]-Alpha);
a[3][1]=L[3]*cos((*p).theta[2]);
a[3][2]=L[5]*cos((*p).theta[3]);
#include "conio.h"
#define Alpha (PI/3)
#define PI 3.979
#define Angle (PI/180)
FILE *fp;
struct motion
{
int theta1;
double theta[5]; /*theta1,2,3,5,6*/
double w[4];/*w2,3,5,6*/
for(m=0;m<4;m++)
(*p).theta[m+1]=x[m];
printf("%d %d",n,i);
getchar();
机械原理大作业一(平面连杆机构的运动分析)
大作业(一)平面连杆机构的运动分析(题号:_10B_)学校:西北农林科技大学学院:机械与电子工程学院指导老师:***一.题目及原始数据;二、牛头刨床机构的运动分析方程三.计算程序框图;四.计算源程序;五.计算结果;六.运动线图及运动分析七.参考书;一、题目及原始数据;图b 所示的为一牛头刨床(Ⅲ级机构)。
假设已知各构件的尺寸如表2所示,原动件1以等角速度ω1=1rad/s 沿着逆时针方向回转,试求各从动件的角位移、角速度和角加速度以及刨头C 点的位移、速度和加速度的变化情况。
b )表2 牛头刨床机构的尺寸参数(单位:mm )要求:每三人一组,每人一个题目,每组中至少打印出一份源程序,每人计算出原动件从0゜~360゜时(N=36) 各运动变量的大小,并绘出各组对应的运动线图以及E 点的轨迹曲线。
二、牛头刨床机构的运动分析方程1)位置分析建立封闭矢量多边形由图可知错误!未找到引用源。
=3θ,故未知量有3θ、4θ、3S 、5S 。
利用两个封闭图形ABDEA和EDCGE ,建立两个封闭矢量方程,由此可得:把(式Ⅰ)写成投影方程得:⎪⎪⎭⎪⎪⎬⎫⎪⎪⎩⎪⎪⎨⎧=+=-++=++=+h l l s l l l h s l l h s l 33445334411133441123344sin sin 0cos cos sin sin sin cos cos cos θθθθθθθθθθ(式Ⅱ)由以上各式用型转化法可求得5343 s s θθ, 23θθ=解: 211111*cos *sin b b x h l y h l θθ=+⎧⎨=+⎩4444*cos *sin d d x l y l θθ=⎧⎨=⎩3s =3sin b dx x s α-=33333)*sin *()/*cos *(/c d d b d c d d b d s x x l x l x x s y y l y l y y s αα=+=+-⎧⎪⎨=+=+-⎪⎩ 3tan c dc dy y x x θ-=-5c s x =()ae AE =444()tan *cos d c y h y l θθ+-=高斯消去法求解 2.速度分析对(式Ⅱ)求一次导数得:44433333111444333331114443335444333*sin *s '*cos *sin **sin **cos *'*sin *cos **cos **sin **sin *'0*cos **cos *0l s l l s s l l l s l l θωθθωθωθωθθωθωθωθωθωθω-+-=-⎫⎪++=⎪⎬---=⎪⎪+=⎭ (式Ⅲ)矩阵式:⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡-----0cos cos 01sin sin 00cos cos sin 0sin sin cos 443344334433344333θθθθθθθθθθl l l l l s l s ⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡'543'3s w w s =⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡-00cos sin 11111θθl l w (Ⅳ) 采用高斯消去法可求解(式Ⅳ)可解得角速度ω3,ω4;3.加速度分析把式Ⅳ对时间求导数得矩阵式:⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡-----0cos cos 01sin sin 00cos cos sin 0sin sin cos 443344334433344333θθθθθθθθθθl l l l l s l s ⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡''543''3s s αα = ⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡----------0sin sin 00cos cos 00sin sin cos cos 0cos cos sin sin 4443334443334443333'3334443333'333θθθθθθθθθθθθw l w l w l w l w l w s s w w l w s s w +⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡--00sin cos 1111111θθw l w l w(式Ⅴ)采用高斯消去法可求解(式Ⅴ)可得角加速度43αα,三.程序流程图位置分析速度分析加速度分析四、计算源程序#include<stdio.h> #include<stdlib.h> #include<math.h>#define PI 3.1415926 #define N 4#define E 0.0001 #define T 1000void Solutionangle(double [12],double ); /*迭代法求角位移*/void Solutionspeed(double [N][N],double [N],double [12],double ); /*角速度求解*/void Solutionacceleration(double [N][N],double [N][N],double [N],double [12]);/*角加速度求解*/void GaussianE(double [N][N],double [N],double [N]);/*高斯消去*/void FoundmatrixA(double [12],double [N][N]); //创建系数矩阵A void FoundmatrixB(double [12],double ,double [N]);//创建系数矩阵B void FoundmatrixDA(double [12],double [N][N]);//创建矩阵DAvoid FoundmatrixDB(double [12],double ,double [N]);//创建矩阵DB//定义全局变量double l1=180,l3=960,l4=160,h=900,h1=460,h2=110,as1=1.0;//主函数void main(){int i,j;FILE *fp;double shuju[36][12];double psvalue[12],a[N][N],da[N][N],b[N],db[N],ang1;//建立文件,并制表头if((fp=fopen("shuju","w"))==NULL){printf("Cann't open this file.\n");exit(0);}fprintf(fp,"\n L1 =%lf",l1);fprintf(fp,"\n s3 ang3 ang4 s5 "); fprintf(fp," s3' as3 as4 s5' "); fprintf(fp," s3'' aas3 aas4 s5'' \n");//计算数据并写入文件psvalue[0]=480;psvalue[1]=65*PI/180;psvalue[2]=10*PI/180;psvalue[3]=5 00;for(i=0;i<36;i++){ang1=i*PI/18;Solutionangle(psvalue,ang1);FoundmatrixB(psvalue,ang1,b);FoundmatrixA(psvalue,a);Solutionspeed(a,b,psvalue,ang1);FoundmatrixDA(psvalue,da);FoundmatrixDB(psvalue,ang1,db);Solutionacceleration(a,da,db,psvalue);for(j=1;j<3;j++)psvalue[j]=psvalue[j]*180/PI;for(j=0;j<12;j++){shuju[i][j]=psvalue[j];}fprintf(fp,"\n");for(j=0;j<12;j++)fprintf(fp,"%12.3f ",shuju[i][j]);for(j=1;j<3;j++)psvalue[j]=psvalue[j]*PI/180;for(j=0;j<4;j++)psvalue[j]+=psvalue[j+4];}fclose(fp);//输出数据for(i=0;i<36;i++){ang1=i*PI/18;printf("\n输出ang1=%d时的求解\n",i*10);printf("angle angspeed angacceleration :\n"); for(j=0;j<4;j++)printf("%lf\t",shuju[i][j]);printf("\n");for(j=4;j<8;j++)printf("%lf\t",shuju[i][j]);printf("\n");for(j=8;j<12;j++)printf("%lf\t",shuju[i][j]);printf("\n");}}/*矢量法求角位移*/void Solutionangle(double value[12],double ang1){double ae,s3,ang3,ang4,s5,t=0;s3=value[0];ang3=value[1];ang4=value[2];s5=value[3];double xb,yb,xd,yd,xc,yc;while(t<T){xb=h2+l1*cos(ang1); yb=h1+l1*sin(ang1);xd=l4*cos(ang4); yd=l4*sin(ang4);s3=sqrt((xd-xb)*(xd-xb)+(yd-yb)*(yd-yb));xc=xd+l3*(xb-xd)/s3;yc=yd+l3*(yb-yd)/s3;ang3=atan2(yc-yd,xc-xd);s5=xc;ae=sqrt(h1*h1+h2*h2);if(fabs(yc-h)<E)return;elseang4=atan((yd-yc+h)/(l4*cos(ang4)));value[0]=s3;value[1]=ang3;value[2]=ang4;value[3]=s5;while(value[1]>2*PI)value[1]-=2*PI;while(value[1]<0)value[1]+=2*PI;while(value[2]>PI)value[2]-=2*PI;while(value[2]<-PI)value[2]+=2*PI;t+=1;if(t>=T){printf("%f 迭代失败.\n",ang1*180/PI);exit(0);}}}/*角速度求解*/void Solutionspeed(double a2[N][N],double b2[N],double value[12],double ang1){double p2[N];GaussianE(a2,b2,p2);value[4]=p2[0];value[5]=p2[1];value[6]=p2[2];value[7]=p2[3];}/*角加速度求解*/void Solutionacceleration(double a3[N][N],double da3[N][N],doubledb3[N],double value[12]){int i,j;double bk[N]={0};double p3[N];for(i=0;i<N;i++){for(j=0;j<N;j++){bk[i]+=-da3[i][j]*value[4+j];}bk[i]+=db3[i]*as1;}GaussianE(a3,bk,p3);value[8]=p3[0];value[9]=p3[1];value[10]=p3[2];value[11]=p3[3];}/*高斯消去法解矩阵方程*/void GaussianE(double a4[N][N],double b4[N],double p4[N]) {int i,j,k;double a4g[N][N],b4g[N],t;for(i=0;i<N;i++)for(j=0;j<N;j++)a4g[i][j]=a4[i][j];for(i=0;i<N;i++)b4g[i]=b4[i];//施主对角线上的值尽可能大if(a4g[0][0]<a4g[1][0] && a4g[0][1]>a4g[1][1]){for(j=0;j<N;j++){t=a4g[0][j];a4g[0][j]=a4g[1][j];a4g[1][j]=t;}t=b4g[0];b4g[0]=b4g[1];b4g[1]=t;}if(a4g[2][2]<a4g[3][2] && a4g[2][3]>a4g[3][3]){for(j=0;j<N;j++){t=a4g[2][j];a4g[2][j]=a4g[3][j];a4g[3][j]=t;}t=b4g[2];b4g[2]=b4g[1];b4g[3]=t;}//初等行变换for(j=0;j<N;j++)for(i=0;i<N;i++){if(i!=j){for(k=0;k<N;k++)if(k!=j){a4g[i][k]-=a4g[i][j]/a4g[j][j]*a4g[j][k];}b4g[i]-=b4g[j]*a4g[i][j]/a4g[j][j];a4g[i][j]=0;}}for(i=0;i<N;i++)b4g[i]/=a4g[i][i];p4[0]=b4g[0];p4[1]=b4g[1];p4[2]=b4g[2];p4[3]=b4g[3];}//创建系数矩阵Avoid FoundmatrixA(double value5[12],double a5[N][N]){double s3,ang3,ang4,s5;s3=value5[0];ang3=value5[1];ang4=value5[2];s5=value5[3];a5[0][0]=cos(ang3);a5[0][1]=-s3*sin(ang3);a5[0][2]=-l4*sin(ang4);a5[1][0]=sin(ang3);a5[1][1]=s3*cos(ang3);a5[1][2]=l4*cos(ang4);a5[2][1]=-l3*sin(ang3);a5[2][2]=-l4*sin(ang4);a5[2][3]=-1;a5[3][1]=l3*cos(ang3);a5[3][2]=l4*cos(ang4);a5[0][3]=a5[1][3]=a5[2][0]=a5[3][0]=a5[3][3]=0;}//创建系数矩阵Bvoid FoundmatrixB(double value6[12],double ang1,double b6[N]){b6[0]=-l1*sin(ang1)*as1;b6[1]=l1*cos(ang1)*as1;b6[2]=b6[3]=0;}//创建矩阵DAvoid FoundmatrixDA(double value7[12],double da7[N][N]){double s3,ang3,ang4,s5,s3g,as3,as4,s5g;s3=value7[0];ang3=value7[1];ang4=value7[2];s5=value7[3];s3g=value7[4];as3=value7[5];as4=value7[6];s5g=value7[7];da7[0][0]=-as3*sin(ang3); da7[0][1]=-s3g*sin(ang3)-s3*cos(ang3)*as3; da7[0][2]=-l4*cos(ang4)*as4;da7[1][0]=as3*cos(ang3); da7[1][1]=s3g*cos(ang3)-s3*sin(ang3)*as3; da7[1][2]=-l4*sin(ang4)*as4;da7[2][1]=-l3*cos(ang3)*as3; da7[2][2]=-l4*cos(ang4)*as4;da7[3][1]=-l3*sin(ang3)*as3; da7[3][2]=-l4*sin(ang4)*as4;da7[0][3]=da7[1][3]=da7[2][0]=da7[2][3]=da7[3][0]=da7[3][3]=0;}//创建矩阵DBvoid FoundmatrixDB(double value8[12],double ang1,double db8[N]){db8[0]=-l1*as1*cos(ang1);db8[1]=-l1*as1*sin(ang1);db8[2]=db8[3]=0;}四、计算结果、数据10—B: lAB =180, lCD =960, lDE =160,h=900,h1=460,h2=135 程序运行结果:输出ang1=0时的求解angle angspeed angacceleration :504.039076 74.795444 -9.495711 409.583017198.751387 0.098628 -0.157357 -95.52202218.491125 0.270992 -0.379393 -267.416873输出ang1=10时的求解angle angspeed angacceleration :538.732197 75.993711 -11.339083 389.224179197.279713 0.138772 -0.205532 -135.726082-33.646469 0.193548 -0.180789 -197.071140输出ang1=20时的求解angle angspeed angacceleration :572.425650 77.533490 -13.505230 362.809939187.595715 0.167668 -0.223341 -165.511310-75.745240 0.141311 -0.030832 -147.198703输出ang1=30时的求解angle angspeed angacceleration :603.833542 79.322650 -15.730731 331.874448171.336235 0.189198 -0.218510 -187.964199-109.306697 0.107995 0.081095 -112.082167输出ang1=40时的求解angle angspeed angacceleration :631.929215 81.302128 -17.818172 297.500218149.836341 0.206101 -0.196427 -205.198868-136.045702 0.087401 0.168929 -86.713350输出ang1=50时的求解angle angspeed angacceleration :655.895287 83.435335 -19.612773 260.468398124.171060 0.220187 -0.160339 -218.604642-157.205807 0.075112 0.242928 -67.783866输出ang1=60时的求解angle angspeed angacceleration :675.082991 85.700444 -20.984446 221.36052195.237132 0.232630 -0.112076 -229.118402-173.614279 0.068177 0.309123 -53.324566输出ang1=70时的求解angle angspeed angacceleration :688.993808 88.084993 -21.817377 180.619839 63.810569 0.244175 -0.052735 -237.413048 -185.854285 0.064519 0.370066 -42.223597输出ang1=80时的求解angle angspeed angacceleration :697.252336 90.582388 -22.005185 138.586009 30.576581 0.255245 0.016790 -244.016229 -194.400792 0.062475 0.425589 -33.864710输出ang1=90时的求解angle angspeed angacceleration :699.596674 93.188858 -21.451254 95.514468 -3.858944 0.265988 0.095384 -249.371483 -199.694701 0.060504 0.473506 -27.864485输出ang1=100时的求解angle angspeed angacceleration :695.865633 95.900697 -20.072519 51.589105 -38.965270 0.276279 0.181437 -253.859385 -202.153581 0.057046 0.510449 -23.857448输出ang1=110时的求解angle angspeed angacceleration :685.983277 98.711634 -17.805029 6.933394-74.278772 0.285719 0.272715 -257.783709 -202.111529 0.050473 0.532809 -21.287355输出ang1=120时的求解angle angspeed angacceleration :669.950064 101.609969 -14.610191 -38.372057 -109.376771 0.293616 0.366385 -261.317271 -199.668758 0.039047 0.537342 -19.160070输出ang1=130时的求解angle angspeed angacceleration :647.841627 104.575458 -10.480584 -84.257919 -143.814604 0.298951 0.459054 -264.396466 -194.414681 0.020755 0.520667 -15.693075输出ang1=140时的求解angle angspeed angacceleration :619.821421 107.575800 -5.446130 -130.610778 -176.999389 0.300311 0.546571 -266.540129 -184.964518 -0.007020 0.476940 -7.771361输出ang1=150时的求解angle angspeed angacceleration :586.184918 110.562008 0.415063 -177.176221 -207.962526 0.295748 0.623253 -266.552595 -168.266256 -0.047758 0.393549 9.812596输出ang1=160时的求解angle angspeed angacceleration :547.454933 113.462407 6.953911 -223.398352 -235.003072 0.282665 0.680257 -262.100065 -138.903553 -0.105183 0.246327 44.899562输出ang1=170时的求解angle angspeed angacceleration :504.544302 116.176610 13.908306 -268.184887 -255.282561 0.257989 0.703480 -249.323224 -89.538230 -0.180241 0.000287 106.600867输出ang1=180时的求解angle angspeed angacceleration :458.971730 118.574668 20.844503 -309.643625 -264.764006 0.219135 0.672921 -223.057053 -14.821184 -0.265454 -0.371999 199.314672输出ang1=190时的求解angle angspeed angacceleration :413.004585 120.510406 27.115020 -344.972134 -259.172109 0.165718 0.567137 -178.419329 81.585955 -0.344194 -0.853747 314.511221输出ang1=200时的求解angle angspeed angacceleration :369.545053 121.847767 31.889429 -370.706568 -235.758436 0.099887 0.372457 -112.937479 187.297933 -0.408887 -1.378443 436.158793输出ang1=210时的求解angle angspeed angacceleration :331.798652 122.469341 34.258483 -383.133346 -193.593039 0.022078 0.086043 -25.631424 297.241960 -0.491104 -1.905920 568.696016输出ang1=220时的求解angle angspeed angacceleration :303.153821 122.219130 33.292190 -378.091293 -130.922824 -0.077456 -0.296427 88.941491 425.795050 -0.676887 -2.496336 760.311055输出ang1=230时的求解angle angspeed angacceleration :287.551415 120.753136 27.951831 -349.551698 -43.461002 -0.227868 -0.791435 247.346675 575.056468 -1.094027 -3.164335 1076.851819输出ang1=240时的求解angle angspeed angacceleration :289.100599 117.353641 17.210022 -288.265712 60.871402 -0.467341 -1.348797 462.335114 552.433286 -1.593002 -2.815597 1309.871650输出ang1=250时的求解angle angspeed angacceleration :305.894540 111.367369 2.144459 -189.884640 115.218973 -0.708552 -1.550036 642.734960 12.240677 -0.870938 0.991883 564.144526输出ang1=260时的求解angle angspeed angacceleration :323.986413 103.946293 -11.427774 -74.543748 84.395898 -0.738254 -1.089162 653.304280 -255.624069 0.384248 3.565003 -304.928302输出ang1=270时的求解angle angspeed angacceleration :335.302309 97.031096 -19.261449 33.532005 49.129286 -0.637650 -0.496091 581.357015 -130.140634 0.646045 2.981435 -447.569870输出ang1=280时的求解angle angspeed angacceleration :342.600355 91.196115 -21.943547 128.368687 38.126480 -0.532397 -0.071890 506.691297-5.585137 0.546267 1.904793 -405.499868输出ang1=290时的求解angle angspeed angacceleration :349.595686 86.317539 -21.260725 210.767956 44.168587 -0.446028 0.184434 438.002883 68.415716 0.453589 1.077375 -389.377468输出ang1=300时的求解angle angspeed angacceleration :358.607892 82.240708 -18.666754 281.194923 60.502728 -0.370112 0.316464 368.260484 116.057770 0.427245 0.460440 -415.756327输出ang1=310时的求解angle angspeed angacceleration :371.130402 78.917555 -15.254653 338.895047 84.027335 -0.293669 0.351067 291.444179 151.953756 0.455712 -0.052046 -466.454916输出ang1=320时的求解angle angspeed angacceleration :388.249233 76.393061 -11.922868 382.397984 112.840822 -0.209756 0.302612 205.717135 175.288599 0.505389 -0.486217 -511.900005输出ang1=330时的求解angle angspeed angacceleration :410.645047 74.745942 -9.416616 410.419610 143.730687 -0.119125 0.190619 115.320694 173.230815 0.523328 -0.760168 -513.913856输出ang1=340时的求解angle angspeed angacceleration :438.227350 74.001595 -8.199258 422.950752 171.284625 -0.031250 0.052211 30.029879 137.214564 0.471995 -0.783284 -454.129609输出ang1=350时的求解angle angspeed angacceleration :469.931682 74.073764 -8.319585 421.739944 190.319958 0.042754 -0.071138 -41.115003 79.001118 0.372107 -0.609234 -358.898217五.运动线图及分析θ3,θ4ω3,ω4α3,α4S3,S5V3,V5a3,a5机构运动分析:(1)、从θ3-θ1,θ4-θ1曲线图可知,3杆为摆动导杆,4杆为摇杆,(2)、从ω3-θ1、ω4-θ1容易看出:在θ1为0 o~200 o之间,3杆角速度变化较为平缓,保证刨头慢速、稳定工作;在220 o~340 o之间为回程阶段,角速度变化较快,以提高效率;4杆有4个角速度为0点,即4杆的速度方向改变了四次。
140120231 周生森 机械原理大作业(一)手写板
Harbin Institute of Technology机械原理大作业一课程名称:机械原理设计题目:连杆机构运动分析院系:汽车工程学院班级:车辆二班设计者:周生森学号:140120231指导教师:王瑞&姜雪日期:2015.051.运动分析题目2.连杆机构运动分析要求(1)按比例画出机构运动简图;(2)对机构进行结构分析,找出组成机构的基本杆组;(3)机构自由度的分析 3.建立坐标系;y4.各基本杆组的运动分析数学模型;5.MATHLAB编程5.1 构件5的角位移xa=0;ya=0;xd=300;yd=-500;xg=-430;yg=210;fe=265;ab=100;gf=670;be=460;bc=460;cd=250; a7=pi/6;ec=2*bc*sin(a7/2);a1=0:0.001:2*pi;t=a1./10;xb=ab.*cos(a1);yb=ab.*sin(a1);a2=atan((yd-yb)./(xd-xb))+pi;bd=sqrt(((yb-yd).*(yb-yd))+((xb-xd).* (xb-xd)));a3=acos((bd.*bd+cd.*cd-bc.*bc)./(2*bd .*cd));xc=xd-cd.*sin(a2+a3-pi/2);yc=yd+cd.*cos(a2+a3-pi/2);fori=1:length(a1)ifatan((yc(i)-yb(i))./(xc(i)-xb(i)))> 0a4(i)=atan((yc(i)-yb(i))./(xc(i)-xb(i )));elsea4(i)=atan((yc(i)-yb(i))./(xc(i)-xb(i )))+pi;endendfori=1:length(a1)if a4(i)+5*pi/12<piye(i)=yc(i)+ec.*cos(a4(i)-1/12*pi); xe(i)=xc(i)-ec.*sin(a4(i)-1/12*pi); elseye(i)=yc(i)-ec.*sin(a4(i)-7*pi/12); xe(i)=xc(i)-ec.*cos(a4(i)-7*pi/12); endendfori=1:length(a1)ifatan((ye(i)-yg)./(xe(i)-xg))>0a5(i)=atan((ye(i)-yg)./(xe(i)-xg)); elsea5(i)=atan((ye(i)-yg)./(xe(i)-xg))+pi ;endendge=sqrt((ye-yg).*(ye-yg)+(xe-xg).*(xe -xg));a6=acos((ge.*ge+fe.*fe-gf.*gf)./(2*ge .*fe));xf=xe-fe.*cos(a5+a6-pi);yf=ye-fe.*sin(a5+a6-pi);a10=acos((ge.*ge+gf*gf-fe*fe)./(2*gf. *ge));plot(t,a5-a10); >> title('构件5的角位移');xlabel('t/s');ylabel('角度rad');grid on;5.2构件5的角速度xa=0;ya=0;xd=300;yd=-500;xg=-430;yg=210;fe=265;ab=100;gf=670;be=460;bc=460;cd=250;a7=pi/6;ec=2*bc*sin(a7/2);a1=0:0.001:2*pi;t=a1./10;xb=ab.*cos(a1);yb=ab.*sin(a1);a2=atan((yd-yb)./(xd-xb))+pi;bd=sqrt(((yb-yd).*(yb-yd))+((xb-xd).* (xb-xd)));a3=acos((bd.*bd+cd.*cd-bc.*bc)./(2*bd .*cd));xc=xd-cd.*sin(a2+a3-pi/2);yc=yd+cd.*cos(a2+a3-pi/2);fori=1:length(a1)ifatan((yc(i)-yb(i))./(xc(i)-xb(i)))> 0a4(i)=atan((yc(i)-yb(i))./(xc(i)-xb(i )));elsea4(i)=atan((yc(i)-yb(i))./(xc(i)-xb(i )))+pi;endendfori=1:length(a1)if a4(i)+5*pi/12<piye(i)=yc(i)+ec.*cos(a4(i)-1/12*pi); xe(i)=xc(i)-ec.*sin(a4(i)-1/12*pi); elseye(i)=yc(i)-ec.*sin(a4(i)-7*pi/12); xe(i)=xc(i)-ec.*cos(a4(i)-7*pi/12); endendfori=1:length(a1)ifatan((ye(i)-yg)./(xe(i)-xg))>0a5(i)=atan((ye(i)-yg)./(xe(i)-xg)); elsea5(i)=atan((ye(i)-yg)./(xe(i)-xg))+pi ;endendge=sqrt((ye-yg).*(ye-yg)+(xe-xg).*(xe -xg));a6=acos((ge.*ge+fe.*fe-gf.*gf)./(2*ge .*fe));xf=xe-fe.*cos(a5+a6-pi);yf=ye-fe.*sin(a5+a6-pi);a10=acos((ge.*ge+gf*gf-fe*fe)./(2*gf. *ge));plot(t(1:6283),diff(a5-a10)./diff(t)) ;title('构件5的角速度');xlabel('t/s');ylabel('角速度rad/s');grid on;5.3 构件5的角加速度xa=0;ya=0; xd=300;yd=-500;xg=-430;yg=210;fe=265;ab=100;gf=670;be=460;bc=460;cd=250;a7=pi/6;ec=2*bc*sin(a7/2);a1=0:0.001:2*pi;t=a1./10;xb=ab.*cos(a1);yb=ab.*sin(a1);a2=atan((yd-yb)./(xd-xb))+pi;bd=sqrt(((yb-yd).*(yb-yd))+((xb-xd).* (xb-xd)));a3=acos((bd.*bd+cd.*cd-bc.*bc)./(2*bd .*cd));xc=xd-cd.*sin(a2+a3-pi/2);yc=yd+cd.*cos(a2+a3-pi/2);fori=1:length(a1)ifatan((yc(i)-yb(i))./(xc(i)-xb(i)))> 0a4(i)=atan((yc(i)-yb(i))./(xc(i)-xb(i )));elsea4(i)=atan((yc(i)-yb(i))./(xc(i)-xb(i )))+pi;endendfori=1:length(a1)if a4(i)+5*pi/12<piye(i)=yc(i)+ec.*cos(a4(i)-1/12*pi);xe(i)=xc(i)-ec.*sin(a4(i)-1/12*pi);elseye(i)=yc(i)-ec.*sin(a4(i)-7*pi/12);xe(i)=xc(i)-ec.*cos(a4(i)-7*pi/12);endendfori=1:length(a1)ifatan((ye(i)-yg)./(xe(i)-xg))>0a5(i)=atan((ye(i)-yg)./(xe(i)-xg));elsea5(i)=atan((ye(i)-yg)./(xe(i)-xg))+pi ; endendge=sqrt((ye-yg).*(ye-yg)+(xe-xg).*(xe -xg));a6=acos((ge.*ge+fe.*fe-gf.*gf)./(2*ge .*fe));xf=xe-fe.*cos(a5+a6-pi);yf=ye-fe.*sin(a5+a6-pi);a10=acos((ge.*ge+gf*gf-fe*fe)./(2*gf. *ge));yv=diff(a5-a10)./diff(t);plot(t(1:length(diff(yv)./diff(t(1:62 83)))),diff(yv)./diff(t(1:6283))); title('构件5的角加速度');xlabel('t/s');ylabel('角加速度rad/s*s');grid on;6.程序运行结果\7.结果分析。
机械原理大作业1

机械原理大作业(一)作业名称:连杆机构运动分析设计题目:第八题院系:班级:设计者:学号:指导教师:明设计时间: 2013年06月20日工业大学机械设计一、题目图1—8所示是曲柄转动导杆机构,BC的长度为a,机架AC的长度为d。
试研究当BC 为主动件时,a、d的长度变化对从动件的角位移、角速度和角加速度的影响规律;当导杆为主动件时,a、d的长度变化对从动件BC的角位移、角速度和角加速度的影响规律。
C二、机构的结构分析机构可分为两部分(1)、RPR杆组(2)、刚性杆三、各基本杆组的运动分析数学模型并建立直角坐标系1、当AB为主动件时设角BAC为wt,w为角速度、t为时间、n为角BCA。
由正弦定理可得a/sin(wt)=b/sin(n+wt) 可推出从动件的角位移n=arcsin(d*sin(w*t)/a)-w*t,,对其求导可得从动件的角速度v=(d*t*cos(t*w))/(a*(1 - (d^2*sin(t*w)^2)/a^2)^(1/2)) – t,再对v求导得从动件的角加速a1=(d^3*t^2*cos(t*w)^2*sin(t*w))/(a^3*(1 - (d^2*sin(t*w)^2)/a^2)^(3/2)) - (d*t^2*sin(t*w))/(a*(1 - (d^2*sin(t*w)^2)/a^2)^(1/2))。
2、当BC为主动件时设角BCA为w`t`,w`为角速度、t`为时间、n`为角BAC。
由正弦定理可得从动件的角位移n`=arctan(asin(w`*t`)/(d-a*cosw`*t`)),从动件的角速度v`= (t`/((d - a*cos(t`*w`))*(1 –t`^2*w`^2)^(1/2)) - (a*t`*asin(t`*w`)*sin(t`*w`))/(d - a*cos(t`*w`))^2)/(asin(t`*w`)^2/(d - a*cos(t`*w`))^2 + 1)。
北科大机械原理大作业
机械原理大作业
项目名称:直折伞机构分析
组员:
1、实物图
2、雨伞的使用功能及使用场合
提供阴凉环境或遮蔽雨、雪的工具。
也可作为装饰物,拐杖或兵器。
3、分析机构的运动,判断原动件的数目、画出机构运动简图,并计算其自由度
机构运动简图1为主动件,向上运动压缩弹簧可实现打开,向下
运动时通过拉伸弹带动2向下运动可实现收伞。
原动件数目:5
计算自由度:F=3(n-1)-2p4-p5,
该机构中6视为机架,共5个构件,7个低副,0个高副,即n=5,p4=7,p5=0。
F=3x5-2x7-0=1自由度为1。
4、大致测绘出构件尺寸,并进行高副低代。
数据测绘如下(mm):
AB=50,BC=80,AC=70,AD=225,DE=230
该机构不存在高副。
5、确定机构所含杆组的数目和级别(拆杆组),并判断机构的级别。
该机构可拆分为1个三级杆组,所以该机构等级为三级。
6、用图解法求出最小传动角值
最小传动角为图中
7、分析该机构有无急回特性和死点位置
无
8、机构运动分析
位移分析如图
速度分析如图
加速度分析如图
9、分析该机构的优缺点,如何改进其不足
优点:防风效果好,结实耐用,结构简单,制造方便,经济成本低。
缺点: 打开及收回时比较费力,携带不方便,闲置时占空间较大。
将伞柄处设计为自动按钮控制收缩,每次使用完毕按照伞布面的褶印进行整理装入指定的收纳袋里根据空间合理选择放置方式。
机械原理大作业(一)--连杆(34题)
机械原理大作业(一)作业名称:连杆机构运动分析设计题目:(34)题院系:船舶学院班级: 1213101设计者:学号:哈尔滨工业大学机械设计一、运动分析题目如图所示机构,已知机构各构件的尺寸为BF=200mm,EF=1.25BF,DE=1.13BF,EH=0.85BF,HF=0.65BF,CH=0.81BF,GC=1.56BF,BD=0.58BF,BG=1.85BF,GD=1.6BF,构件1的角速度为W1=10rad/s,试求构件2上点H的轨迹及构件5的角位移,角速度,角加速度,并对计算结果进行分析。
机构结构分析:二、机构的结构分析及基本杆组划分机构各构件都在同一平面内运动,活动构件数n=5,=7,=0则机构的自由度为:F=3×n-2×-1×=3×5-2×7-0=12.基本杆组划分(1)去除虚约束和局部自由度本机构中无虚约束或局部自由度。
(2)拆杆组。
从远离原动件(即杆1)进行拆分,就可以得到由杆4,5 组成的RRRⅡ级杆组GCH,2,3 组成的RRRⅡ级杆组EDF,最后剩下Ⅰ级机构杆1。
(3)确定机构的级别 由(2)知,机构为Ⅱ级机构三、各基本杆组的运动分析数学模型1)Ⅰ级杆组BF (原动件)在Ⅰ级杆组BF 中,即已知构件上B 点的运动参数,求同一构件上F 点(回转副)的运动参数。
调用Ⅰ级机构子程序即可求解 ①位置分析 由图可得F 点的矢量方程F B BF r r l =+x,y 轴上的投影坐标方程为cos sin F B BF BF F B BF BF x x l y y l ϕϕ=+⋅⎫⎬=+⋅⎭(1)②速度和加速度分析 将式(1)对时间t 求导即可得出速度方程:cos sin BF BF BF BF FF B BF FF B BF dx x x l dtdy y x l dt ϕϕϕϕ⋅⋅⋅⋅⋅⋅⎫⎪==-⎪⎬⎪==+⎪⎭ (2)2222cos sin sin cos BF BF BF BF BF BF BF FF B BF BF BF F F B BFBF d x x x l l dtd y y y l l dt ϕϕϕϕϕϕϕϕ⋅⋅⋅⋅⋅⋅⋅⋅⋅⋅⋅⋅⋅⋅⋅⋅⎫⎪==--⎪⎬⎪==--⎪⎭(3)其中因为设B 为原点:B x =0;B y =0 ;B x ⋅=0 ;B y ⋅=0 ;B x ⋅⋅=0 ;B y ⋅⋅=0由上(1)(2)(3)方程可求出F 点的位移,速度,加速度2)RRR Ⅱ级杆组DEF 分析,求出F 点的角位移,角速度,角加速度上面1)中已求得F 点的位移,速度,加速度。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
function [ v_Nx,v_Ny ] =v_crank(s,v_Ax,v_Ay,omiga,theta,phi) v_Nx=v_Ax-s*omiga.*sin(theta+phi); v_Ny=v_Ay+s*omiga.*cos(theta+phi); end
3>加速度计算
function [ a_Nx,a_Ny ]=a_crank(s,a_Ax,a_Ay,alph,omiga,theta,phi) a_Nx=a_Ax-alph.*s.*sin(theta+phi)-omiga.^2.*s.*cos(theta+phi);
。
1) 位置分析
将已知 P1P2 两点的坐标差表示为:
u=x2-x1,v=y2-y1
(1)
杆 l1 及 l2 投影方程式为:
l1cosθ1-l2cosθ2=u
l1sinθ1-l2sinθ2=v
(2)
消去θ1 得:vsinθ2+ucosθ2+c=0
(3)
其中: 解式(3)可得:
t(4) 式中+号和-号分别对应图 2 中 m=+1 和 m=-1 两位置。
由式(2)可得:
(5) 2) 速度分析
对 式 (2) 求 导 一 次 得 :
(6)
其中:
解式(6)可得:
(7)
其中: 3) 加速度分析
对式(6)求导一次得:
(8)
其中:
'.
解式(8)可得:
由上述式子可设计出 RRR 杆组运动分析子程序:
1>位置分析:
function[cx,cy,phi2,phi3]=s_RRR(bx,by,dx,dy,l2,l3,m,phi) d=sqrt((dx-bx).^2+(dy-by).^2); if(d>(l2+l3))|(d<abs(l2-l3))
三、E点、F点位置确定
3.1E点
如图可见,过B作水平线,则由比例关系可
得
,则
.
(9)
3.2F点
过F点作竖直线,可得
,
又因为
,有
各杆件长度改变对F点轨迹影响:
'.. '.来自. '..
四、计算流程框图
开始
输入参数
运行程序
输出 1 输出 2 输出 3 结束
绘制机构动画
绘制 F 点轨迹
绘制不同条件下 E 点轨 迹
二、 机构运动分析数学模型 1.杆组拆分与坐标系选取
本机构通过杆组法拆分为: I 级机构、II 级杆组 RRR 两部分如下:
'.
.
2.平面构件运动分析的数学模型
图 3 平面运动构件(单杆)的运动分析
2.1 数学模型 已知构件 K 上的 N1 点的位置 P1x , P1y ,速度为 v1x , v1Y ,
三、 Matlab 计算程序
1.机构动画
Lab=150; Lbc=220; Lcd=250;
n=100;
m=1;
omiga1=2*pi*n/60;
ax=0;ay=0; %A点坐标
theta=0;
vax=0;vay=0; % A速度
aax=0;aay=0; % A加速度
aiph1=0;
%A角加速度
phi1=0:10:360; %A转角
P3x P1x R2 cos( ) P3y P1y R2 sin( ) N1 , N3 点的速度,加速度为: v2x v1x R1 sin v1x (P2 y P1y ) v2 y v1y R1 sin v1y (P2x - P1x ) v3x v1x R2 sin( ) v1x (P3y P1y ) v3y v1y R2 cos( ) v1y (P3x P1x ) a2x a1x (P2y P1y ) 2 (P2x P1x ) a2y a1y (P2x P1x ) 2 (P2y P1y ) a3x a1x (P3y P1y ) 2 (P3x P1x )
phi1=phi1*pi/180;
%计算B运动参数
s=Lab;
Lad=300;
Lef=60;
'.
.
[bx,by]=s_crank(ax,ay,theta,phi1,s); %计算BC杆和CD杆及C dx=Lad;dy=0;%D [cx,cy,phi2,phi3]=s_RRR(bx,by,dx,dy,Lbc,Lcd,m); adx=0;ady=0; ex=(cx-bx)/2+bx; ey=(cy-by)/2+by; %F点 fy=ey+Lef*cos(phi2); fx=ex-Lef*sin(phi2); xlabel('/mm') ylabel('/mm') %杆件位置 l1=line([ax,bx(1)],[ay,by(1)],'color','b','linestyle','-','linewidth' ,2,'Erasemode','xor'); l2=line([bx,cx(1)],[by,cy(1)],'color','b','linestyle','-','linewidth' ,2,'Erasemode','xor'); l3=line([cx,dx(1)],[cy,dy(1)],'color','b','linestyle','-','linewidth' ,2,'Erasemode','xor'); l4=line([ax,dx(1)],[ay,dy(1)],'color','b','linestyle','-','linewidth' ,2,'Erasemode','xor'); l5=line([ex,fx(1)],[ey,fy(1)],'color','b','linestyle','-','linewidth' ,2,'Erasemode','xor'); %铰链位置 h1=line(ax,ay,'color','k','Marker','.','MarkerSize',20,'EraseMode','x or'); h2=line(bx(1),by(1),'color','k','Marker','.','MarkerSize',20,'EraseMo de','xor'); h3=line(cx(1),cy(1),'color','k','Marker','.','MarkerSize',20,'EraseMo de','xor'); h4=line(dx,dy,'color','k','Marker','.','MarkerSize',20,'EraseMode','x or'); h5=line(ex,ey,'color','k','Marker','.','MarkerSize',20,'EraseMode','x or'); h6=line(fx,fy,'color','k','Marker','.','MarkerSize',2,'EraseMode','xo r'); axis([-200,600,-250,300]); grid on %仿真动画 nn=10; mm=0 while mm<nn
errordlg('²»ÄÜ×é×°'); else、
delta=atan((dy-by)./(dx-bx)); gama=acos((d.^2+l2.^2-l3.^2)./(2*d*l2)); phi2=delta+m*gama; cx=bx+l2.*cos(phi2); cy=by+l2.*sin(phi2); phi3=atan((cy-dy)./(cx-dx)); end
. Harbin Institute of Technology
机械原理大作业(一)
课程名称: 设计题目: 院 系: 班 级: 设 计 者: 学 号: 指导教师:
机械原理 连杆机构运动分析 机电工程学院
'.
.
一、 题目(13)
如图所示机构,已知各构件尺寸: Lab=150mm;Lbc=220mm;Lcd=250mm;Lad=300mm;Lef=60mm;Lbe=110mm;EF ⊥ BC。试研究各杆件长度变化对 F 点轨迹的影响。
加速度为 a1x ,a1y 及过点的 N1 点的线段 N1N2 的位置角 , 构件的角速度ω,角加速度ε,求构件上点 N2 和任意指 定点 N3 (位置参数 N1N3 = R2 , N2 N1N3 = )的位置、 速度、加速度。