机械原理大作业
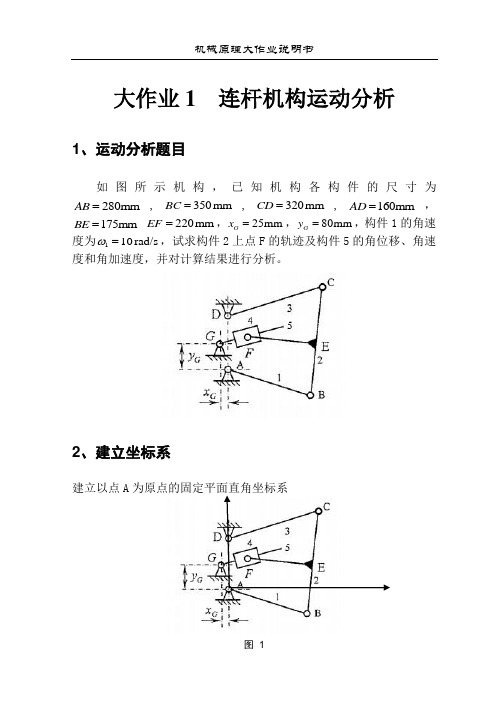
机械原理大作业1(连杆机构)27题
3)已知F点和G点的运动参数可求出杆5的角位移、角速度、角加速度。
6、
1)F点的运动参数
图8点F的运动轨迹
图9点F的x坐标和y坐标随杆AB角位移的变化
图10点F的速度在x和y方向的分量随杆AB的角位移的变化
xc=ones(1,3601);%给点Cx坐标赋初值
yc=ones(1,3601);%给点Cy坐标赋初值
ci=ones(1,3601);%给中间变量赋初值
cj=ones(1,3601);%给中间变量赋初值
wi=ones(1,3601);%给杆BC的角速度赋初值
wj=ones(1,3601);%给杆CD的角速度赋初值
axb=-w*w*xb;%点B的加速度在x方向的分量
ayb=-w*w*yb;%点B的加速度在y方向的分量
xd=0;%点D的x坐标
yd=160;%点D的y坐标
vxd=0;%点D的速度在x方向的分量
vyd=0;%点D的速度在y方向的分量
axd=0;%点D的加速度在x方向的分量
ayd=0;%点D的加速度在y方向的分量
1)位置方程
为求解上式,应先求出 或 ,将上式移相后分别平方相加,消去 得
式中:
其中, 。
为保证机构的装配,必须同时满足
和
解三角方程式 可求得
上式中,“+”表示B、C、D三个运动副为顺时针排列;“—”表示B、C、D为逆时针排列。
将 代入 中可求得 ,而后即可求得
2)速度方程
将式 对时间求导可得两杆的角速度 为
elseif lbd(1,m)==(li+lj)
机械原理大作业1
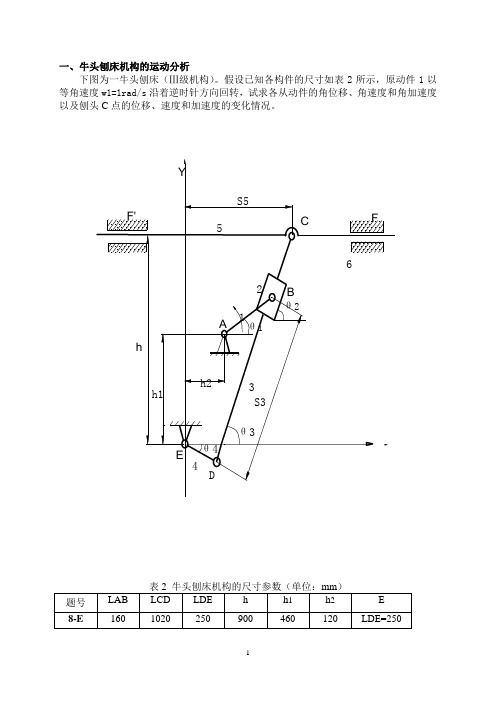
一、牛头刨床机构的运动分析下图为一牛头刨床(Ⅲ级机构)。
假设已知各构件的尺寸如表2所示,原动件1以等角速度w1=1rad/s沿着逆时针方向回转,试求各从动件的角位移、角速度和角加速度以及刨头C点的位移、速度和加速度的变化情况。
二、牛头刨床机构的运动分析方程 1)位置分析建立封闭矢量多边形建立一直角坐标系,并标出各杆矢量及其方位角,其中共有4个未知量3θ(θ2=3θ)、4θ、3S 、5S 。
利用两个封闭图形ABDEFA 和EDCGE ,建立两个封闭矢量方程,由此可得:3125DE AB DE CD l s h h l l l h s →→→→→→→→→⎧+=++⎪⎨⎪+=+⎩(1)把(1)写成投影方程得:433214331143543cos *cos *cos *sin *sin *sin *cos *cos 0*sin *sin DE AB DE AB DE CD DE CD l s h l l s h l l l s l l h θθθθθθθθθθ*+=+⎫⎪+=+⎪⎬+-=⎪⎪+=⎭(2) 由以上各式用型转化法可求得4335s s θθ、、、,滑块2的方位角23θθ=2111*cos *sin b AB b AB x h l y h l θθ=+⎧⎨=+⎩ 44*cos *sin d DE d DE x l y l θθ=⎧⎨=⎩3s =3)*sin *()/*cos *(/c d CD d CD b d c d CD d CD b d s x x l x l x x s y y l y l y y s αα=+=+-⎧⎪⎨=+=+-⎪⎩ 3tan c dc dy y x x θ-=- 5c s x =()ae AE =44()tan *cos d c DE y h y l θθ+-=高斯消去法求解 2)速度分析对(2)求一次导数得:44333331144333331144334433*sin *s '*cos *sin **sin **cos *'*sin *cos **cos **sin **sin *0*cos **cos *0DE AB DE AB DE CD c DE CD l s l l s s l l l v l l θωθθωθωθωθθωθωθωθωθωθω-+-=-⎫⎪++=⎪⎬---=⎪⎪+=⎭(3)矩阵式:3334313334313443cos *sin *sin 0'*sin sin *cos *cos 0*cos 0*sin *sin 100*cos *cos 00DE AB DE AB CD DE CD DE c s l s l s l l l l l l v θθθθθθθθθθωθθ---⎡⎤⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥ω⎢⎥⎢⎥⎢⎥=ω1⎢⎥⎢⎥⎢⎥---⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦⎣⎦ (4)采用高斯消去法可求解(4)可解得角速度ω2,ω3; 3)加速度分析把(4)对时间求导数得:333433334334434cos *sin *sin 0''sin *cos *cos 00*sin *sin 10*cos *cos 0DE DE CD DE CD DE c s l s s l l l l l a θθθθθθθθαθθ--⎡⎤⎡⎤⎢⎥⎢⎥α⎢⎥⎢⎥⎢⎥⎢⎥---⎢⎥⎢⎥⎣⎦⎣⎦33333444433333343443334443344*sin '*sin **cos **cos 0'*cos '*cos **sin **sin 00**cos **cos 00**sin **sin 0DE DE CD DE CD DE c s s l s s s l l l l l v ωθθωθωθωθθωθωθωθωθωωθωθ----⎡⎤⎡⎤⎢⎥⎢⎥--ω⎢⎥⎢⎥=-⎢⎥⎢⎥--⎢⎥⎢⎥--⎣⎦⎣⎦1111**cos **sin 00AB AB l l ωθωθ-⎡⎤⎢⎥-⎢⎥+ω1⎢⎥⎢⎥⎣⎦(5)采用高斯消去法可求解(5)可解得角加速度α2,α3,α5,α6三、程序流程图四、计算源程序#include<stdio.h>#include<stdlib.h>#include<math.h>/* 定义变量*/const double PI = 3.14159265358979;const int N = 4;const double EPSILON = 0.0001;const int T = 1000;/* 代入已知量*/double Lab=160,Lcd=1020,Lde=250,h=900,h1=460,h2=120,Omega1=1;/* 声明子函数*/void AngleDisplacement(double[12],double);/* 角位移函数*/void AngleVelocity(double[N][N],double[N],double[12],double);/* 角速度函数*/void AngleAcceleration(double[N][N],double[N][N],double[N],double [12]);/* 角加速度函数*/void GaussE(double [N][N],double [N],double [N]);/* 高斯消去法函数*/void ModulusMatrixA(double [12],double [N][N]);/* 矩阵A函数*/void ModulusMatrixB(double [12],double ,double [N]);/* 矩阵B函数*/void MatrixDA(double [12],double [N][N]);/* 矩阵DA函数*/void MatrixDB(double [12],double ,double [N]);/* 矩阵DB函数*//* 主函数*/void main(){int i,j;FILE *fp;double data[36][12];double value[12],a[N][N],da[N][N],b[N],db[N],Phi1;char flag;/* 打开文件*/if((fp = fopen("Data","w")) == NULL){printf("文件打开错误!\n");exit(0);}fprintf(fp,"Lab =%lf \n",Lab);fprintf(fp,"s3\tPhi3\tPhi4\ts5\t");fprintf(fp,"s3'\tOmega3\tOmega4\ts5'\t");fprintf(fp,"s3''\tEpsilon3\tEpsilon4\ts5''");printf("\n\n 牛头刨床机构运动分析程序\n\n\n");printf("\n");printf(" 是否开始计算(Y/N):");scanf("%c",&flag);if(flag =='Y'){/*计算并写入文件*/value[0] = 480;value[1] = 65 * PI / 180;value[2] = 10 * PI / 180;value[3] = 500;for(i = 0;i < 36; i++){Phi1 = i * PI / 18;AngleDisplacement(value,Phi1);ModulusMatrixB(value,Phi1,b);ModulusMatrixA(value,a);AngleVelocity(a,b,value,Phi1);MatrixDA(value,da);MatrixDB(value,Phi1,db);AngleAcceleration(a,da,db,value);for(j = 1;j < 3; j++)value[j] = value[j] * 180 / PI;for(j = 0;j < 12; j++)data[i][j] = value[j];fprintf(fp,"\n");for(j = 0;j < 12; j++)fprintf(fp,"%12.3f\t",data[i][j]);}fclose(fp);/* 输出数据*/printf("\n\n\n计算结果如下:\n");for(i = 0;i < 36; i++){Phi1=i * PI / 18;printf("\n输出Phi1=%d时的求解\n",i*10);printf(" S3 Phi3 Phi5 S5\n");for(j = 0;j < 4; j++)printf("%lf\t",data[i][j]);printf("\n");printf(" S3' Omega3 Omega5S5'\n");for(j = 4;j < 8; j++)printf("%lf\t",data[i][j]);printf("\n");printf(" S3'' Epsilon3 Epsilon5 S5''\n");for(j = 8;j < 12; j++)printf("%lf\t",data[i][j]);printf("\n");}printf("\n程序运行结束,计算结果已写入Date文件中,请打开查看。
机械原理大作业
function [ v_Nx,v_Ny ] =v_crank(s,v_Ax,v_Ay,omiga,theta,phi) v_Nx=v_Ax-s*omiga.*sin(theta+phi); v_Ny=v_Ay+s*omiga.*cos(theta+phi); end
3>加速度计算
function [ a_Nx,a_Ny ]=a_crank(s,a_Ax,a_Ay,alph,omiga,theta,phi) a_Nx=a_Ax-alph.*s.*sin(theta+phi)-omiga.^2.*s.*cos(theta+phi);
。
1) 位置分析
将已知 P1P2 两点的坐标差表示为:
u=x2-x1,v=y2-y1
(1)
杆 l1 及 l2 投影方程式为:
l1cosθ1-l2cosθ2=u
l1sinθ1-l2sinθ2=v
(2)
消去θ1 得:vsinθ2+ucosθ2+c=0
(3)
其中: 解式(3)可得:
t(4) 式中+号和-号分别对应图 2 中 m=+1 和 m=-1 两位置。
由式(2)可得:
(5) 2) 速度分析
对 式 (2) 求 导 一 次 得 :
(6)
其中:
解式(6)可得:
(7)
其中: 3) 加速度分析
对式(6)求导一次得:
(8)
其中:
'.
解式(8)可得:
由上述式子可设计出 RRR 杆组运动分析子程序:
1>位置分析:
function[cx,cy,phi2,phi3]=s_RRR(bx,by,dx,dy,l2,l3,m,phi) d=sqrt((dx-bx).^2+(dy-by).^2); if(d>(l2+l3))|(d<abs(l2-l3))
哈工大机械原理大作业
H a r b i n I n s t i t u t e o f T e c h n o l o g y机械原理大作业一课程名称:机械原理设计题目:连杆机构运动分析院系:机电学院班级: 1208105分析者:殷琪学号:指导教师:丁刚设计时间:哈尔滨工业大学设计说明书1 、题目如图所示机构,一只机构各构件的尺寸为AB=100mm,BC=4.28AB,CE=4.86AB,BE=8.4AB,CD=2.14AB,AD=4.55AB,AF=7AB,DF=3.32AB,∠BCE=139?。
构件1的角速度为ω1=10rad/s,试求构件2上点E的轨迹及构件5的角位移、角速度和角加速度,并对计算结果进行分析。
2、机构结构分析该机构由6个构件组成,4和5之间通过移动副连接,其他各构件之间通过转动副连接,主动件为杆1,杆2、3、4、5为从动件,2和3组成Ⅱ级RRR基本杆组,4和5组成Ⅱ级RPR 基本杆组。
如图建立坐标系3、各基本杆组的运动分析数学模型1) 位置分析2) 速度和加速度分析 将上式对时间t 求导,可得速度方程:将上式对时间t 求导,可得加速度方程:RRR Ⅱ级杆组的运动分析如下图所示 当已知RRR 杆组中两杆长L BC 、L CD 和两外副B 、D 的位置和运动时,求内副C的位置、两杆的角位置、角运动以及E 点的运动。
1) 位置方程由移项消去j ϕ后可求得i ϕ:式中,可求得j ϕ:E 点坐标方程:其中2) 速度方程两杆角速度方程为式中,点E 速度方程为3) 加速度方程两杆角加速度为式中,点E 加速度方程为RPR Ⅱ级杆组的运动分析(1) 位移方程(2)速度方程其中(3)加速度方程4、 计算编程利用MATLAB 软件进行编程,程序如下:% 点B 和AB 杆运动状态分析>>r=pi/180;w 1=10;e 1=0;l 1=100;Xa=0;Ya=0;Vax=0;Vay=0;aax=0;aay=0;f1=0:1: 360;% B 点位置Xb=Xa+l1*cos(r*f1);Yb=Ya+l1*sin(r*f1);% B点速度Vbx=Vax-w1*l1*sin(r*f1);Vby=Vay+w1*l1*cos(r*f1);% B点加速度abx=aax-l1*w1.^2.*cos(r*f1);aby=aay-l1*w1.^2.*sin(r*f1);% RRR2级杆组运动分析% 输入D点参数l2=428;l3=214;Xd=455;Yd=0;Vdx=0;Vdy=0;adx=0;ady=0;% 计算E点、2杆、3杆运动参数lbe=840;lce=486;a0=2*l2*(Xd-Xb);b0=2*l2*(Yd-Yb);c0=l2^2+(Xb-Xd).^2+(Yb-Yd).^2-l3^2;f2=2*atan((b0+sqrt(a0.^2+b0.^2-c0.^2))./(a0+c0)); % C点位置Xc=Xb+l2*cos(f2);Yc=Yb+l2*sin(f2);% 2杆、3杆运动参数计算dX=Xc-Xd;dY=Yc-Yd;for n=1:length(dX)if dX(n)>0&dY(n)>=0f3(n)=atan(dY(n)/dX(n));elseif dX(n)==0&dY(n)>0f3(n)=pi/2;elseif dX(n)<0&dY(n)>=0f3(n)=pi+atan(dY(n)/dX(n));elseif dX(n)<0&dY(n)<0f3(n)=pi+atan(dY(n)/dX(n));elseif dX(n)==0&dY(n)<0f3(n)=1.5*pi;elseif dX(n)>0&dY(n)<0f3(n)=2*pi+atan(dY(n)/dX(n));endendC2=l2*cos(f2);C3=l3*cos(f3);S2=l2*sin(f2);S3=l3*sin(f3);G1=C2.*S3-C3.*S2;w2=(C3.*(Vdx-Vbx)+S3.*(Vdy-Vby))./G1;w3=(C2.*(Vdx-Vbx)+S2.*(Vdy-Vby))./G1;G2=adx-abx+(w2.^2).*C2-(w3.^2).*C3;G3=ady-aby+(w2.^2).*S2-(w3.^2).*S3;e2=(G2.*C3+G3.*S3)./G1;% E点位置w=acos((l2^2+lbe^2-lce^2)/(2*l2*lbe));Xe=Xb+lbe*cos(f2-w);Ye=Yb+lbe*sin(f2-w);Vex=Vbx-lbe*w2.*sin(f2-w);Vey=Vby+lbe*w2.*cos(f2-w);aex=abx-lbe*(e2.*sin(f2-w)+w2.^2.*cos(f2-w));aey=aby+lbe*(e2.*cos(f2-w)-w2.^2.*sin(f2-w));% 计算杆5运动参数Xf=646.2912088;Yf=-268.9008617;l5=sqrt((Xe-Xf).^2+(Ye-Yf).^2);dX=Xe-Xf;dY=Ye-Yf;for n=1:length(dX)if dX(n)>0&dY(n)>=0f5(n)=atan(dY(n)/dX(n));elseif dX(n)==0&dY(n)>0f5(n)=pi/2;elseif dX(n)<0&dY(n)>=0f5(n)=pi+atan(dY(n)/dX(n));elseif dX(n)<0&dY(n)<0f5(n)=pi+atan(dY(n)/dX(n));elseif dX(n)==0&dY(n)<0f5(n)=1.5*pi;elseif dX(n)>0&dY(n)<0f5(n)=2*pi+atan(dY(n)/dX(n));endendw5=(-Vex.*sin(f5)+Vey.*cos(f5))./l5;a5=(-aex.*sin(f5)+aey.*cos(f5))./l5;% 画出各参数曲线figure(1);plot(Xe,Ye,'k');xlabel('Xe/\mm');ylabel('Ye/mm');grid on;title('E点位置');figure(2);plot(f1,f5,'k');xlabel('f/\circ');ylabel('f5/\circ');grid on;title('5杆角位移');figure(3);plot(f1,w5,'k');xlabel('f/\circ');ylabel('w5/rad/s');grid on;title('5杆角速度');figure(4);plot(f1,a5,'k');xlabel('f/\circ');ylabel('a5/rad/s2');gridon;title('5杆角加速度');Warning: Unable to interpret TeX string "Xe/\mm"5、计算结果图一:E点的运动轨迹图二:5杆角位移图三:5杆角速度图四:5杆角加速度6、计算结果分析由E点位置图像可看出,构件4做周期往复运动,由图二、三、四可看出,构件5的角位移、角速度、角加速度均成周期性变化。
哈工大机械原理大作业——齿轮——1号
Harbin Institute of Technology机械原理大作业3课程名称:机械原理设计题目:齿轮传动设计哈尔滨工业大学一、设计题目:如下图一个机械传动系统,运动运动由电动机1输入,经过机械传动系变速后由圆锥齿轮16输出三种不同转速。
选择一组传动系统的原始参数,据此设计该传动系统。
序号电机转速〔r/min〕输出轴转速〔r/min〕带传动最大传动比滑移齿轮传动定轴齿轮传动最大传动比模数圆柱齿轮圆锥齿轮一对齿轮最大传动比模数一对齿轮最大传动比模数7 1450 17 23 30 ≤2.8 ≤4.5 2 ≤4.5 3 ≤4 3二、传动比的分配计算:电动机转速n=1450r/min,输出转速n1=17r/min,n2=23 r/min,n3=30 r/min,带传动的最大传动比=2.8,滑移齿轮传动的最大传动比=4.5,圆柱齿轮传动的最大传动比=4.5,圆锥齿轮最大传动比=4。
根据传动系统的原始参数可知,传动系统的总传动比为:i1=1450/30=48.333i2=1450/23=63.043i3=1450/17=85.294传动系统的总传动比由带传动、滑移齿轮传动和定轴齿轮传动三局部实现。
设带传动的传动比为ipmax =2.8,滑移齿轮的传动比为iv1,iv2和iv3,令iv3=ivmax=4.5,那么定轴的传动比为if =85.294/(4.5*2.8)=6.769,从而iv1=48.333/〔6.769*2.8〕=2.550,iv2=3.326。
定轴齿轮每对的传动比为id==1.89。
三、滑移齿轮变速传动中每对齿轮的几何尺寸及重合度:经过计算、比拟,确定出三对滑移齿轮的齿数,其分别为:z5=17,z6=44,z 7=14,z8=47,z9=11,z10=50。
变位系数确实定:x5=x6=0; x7≥ha*(17-14)/17=0.176,取x7=0.18,x8=-0.18;x9≥ha*(17-11)/17=0.353,取x9=0.36;x10=-0.36。
机械原理大作业(平面六杆机构的运动分析)
a[3][1]=L[3]*cos((*p).theta[2]);
a[3][2]=L[5]*cos((*p).theta[3]);
a[3][3]=-L[6]*cos((*p).theta[4]);
b[0]=L[2]*cos((*p).theta[1])*(*p).w[0]*(*p).w[0]-L[3]*cos((*p).theta[2])*(*p).w[1]*(*p).w[1]+w1*w1*L[1]*cos((*p).theta[0]);
a[2][2]=-L[5]*sin((*p).theta[3]);
a[2][3]=L[6]*sin((*p).theta[4]);
a[3][0]=L[0]*cos((*p).theta[1]-Alpha);
a[3][1]=L[3]*cos((*p).theta[2]);
a[3][2]=L[5]*cos((*p).theta[3]);
#include "conio.h"
#define Alpha (PI/3)
#define PI 3.979
#define Angle (PI/180)
FILE *fp;
struct motion
{
int theta1;
double theta[5]; /*theta1,2,3,5,6*/
double w[4];/*w2,3,5,6*/
for(m=0;m<4;m++)
(*p).theta[m+1]=x[m];
printf("%d %d",n,i);
getchar();
机械原理大作业1(六杆机构)
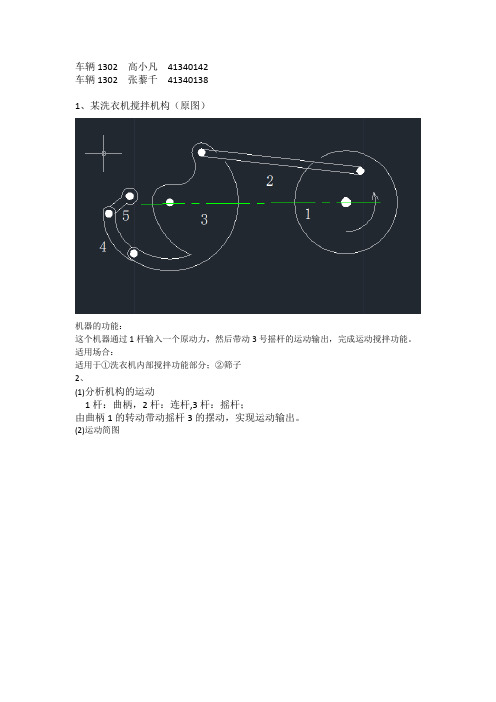
车辆1302 高小凡41340142车辆1302 张藜千413401381、某洗衣机搅拌机构(原图)机器的功能:这个机器通过1杆输入一个原动力,然后带动3号摇杆的运动输出,完成运动搅拌功能。
适用场合:适用于①洗衣机内部搅拌功能部分;②筛子2、(1)分析机构的运动1杆:曲柄,2杆:连杆,3杆:摇杆;由曲柄1的转动带动摇杆3的摆动,实现运动输出。
(2)运动简图(3)如图,该六杆机构只有一个原动件----1杆(4)自由度F=3(n-1)-2P5=3*5-2*7=1上述六杆机构的运动形式可简化为如图四杆机构的运动形式,4,5杆的运动作为摇杆3的输出机构。
3、大致测绘出构件尺寸4、确定机构所含杆组的数目和级别(拆杆组),并判断机构的级别;依次拆下4-5/2-3两个II级杆组及原动件1(II级杆组),所以该机构为II级杆组5、用图解法求出最小传动角值:由下图可知,在极限位置2时,压力角最大为70°,则最小传动角为42°6、分析该机构有无急回特性和死点位置;有急回,无死点;180+1809k 1.11180-1809θθ+===>-7、用瞬心法对机构进行运动分析上图中标出了该机构的简化四杆机构的所有瞬心P 12 P 13 P 16 P 23 P 26 P 36其中,绝对瞬心有:P 16 P 36 P 26 相对瞬心有:P 12P 13 P 23速度分析:若1的角速度为w1,则V(P12)=l1*w1V(P23)= [V(P12)/|P12P13|]*|P13P23 | w3= V(P23)/l3w6= V(P23)/| P23P26 |(1)角速度比mv=w6/w2=l1sinv/l3sinuv=0, mv=0,w6=0,此时构件1、2共线,机构处于极限位置;(2)mv=w6/w2=OP13/CP13 (瞬心P13能够用来确定速度比)上图为该机构(六杆机构)全部瞬心(15个)绝对瞬心:P16, P26,P36,P46,P56相对瞬心:P15,P25,P35,P45P14,P24,P34,P13,P23P12中间密集部分的的放大图如下图:8、用杆组法(或其他解析法)对机构进行运动分析(写出数学模型和程序框图);已知该机构的尺寸为:两个固定铰链点a,d,g的坐标分别为(0,0)(420,0)(-80,-35),曲柄原动件|ab|=100mm,连杆2长为300mm,摇杆3长150mm,杆4长100mm,杆5长50mm.经分析,该机构由一个曲柄原动件和两个RRR二级杆组组成的二级机构用杆组法搭建该机构的步奏如下:1)添加曲柄原动件ab;2)添加RRR二级杆组(2-3),杆组的两个动铰链点分别为已有铰链点b和固定铰链点d; 3)在连杆cd上添加铰链点e;4)添加RRR二级杆组(4-5),杆组的两个动铰链点分别为已有铰链点e和固定铰链点g; 5)该机构搭建完成,利用该程序可自动求出任意给定铰链点或构件的位置、速度、和加速度。
机械原理大作业一
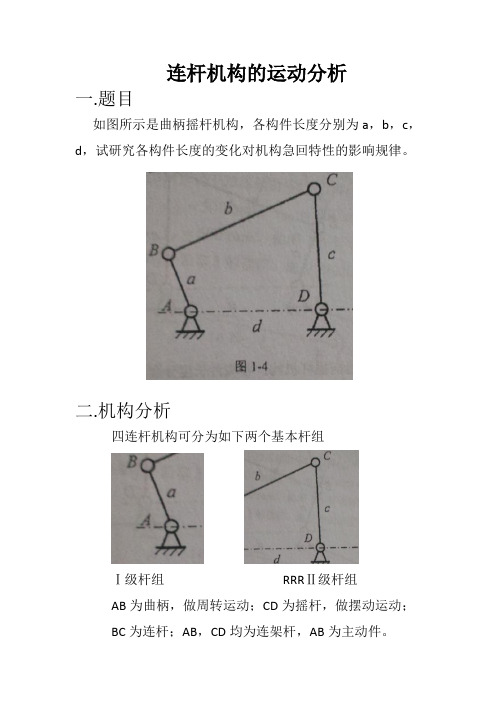
连杆机构的运动分析一.题目如图所示是曲柄摇杆机构,各构件长度分别为a,b,c,d,试研究各构件长度的变化对机构急回特性的影响规律。
二.机构分析四连杆机构可分为如下两个基本杆组Ⅰ级杆组RRRⅡ级杆组AB为曲柄,做周转运动;CD为摇杆,做摆动运动;BC为连杆;AB,CD均为连架杆,AB为主动件。
三.建立数学模型θ为极位夹角,φ为最大摆角必须满足条件为:≤b,a≤c,a≤d(a为最短杆);+L max≤其他两杆之和。
下面分析杆长和极位夹角的关系:在△AC2B中,=;在△AC1B中,=。
θ=-K=最后分以下四种情况讨论:1.机架长度d变化令a=5,b=30,c=29d由6开始变化至54,步长为1 输出杆长a,b,c,d和K。
2.连杆长度b变化令a=5,b=29,d=30b由6开始变化至54,步长为1 输出杆长a,b,c,d和K。
3.摇杆长度c变化令a=5,b=29,d=30c由6开始变化至54,步长为1 输出杆长a,b,c,d和K。
4.曲柄长度a变化令b=29,c=28,d=30a由5开始变化至27,步长为1 输出杆长a,b,c,d和K。
四.MATLAB计算编程a=5;b=30;c=29;d=6:1:54;m=(d.^2-216)./(50.*d);n=(384+d.^2)./(70.*d);p=acos(m);q=acos(n);w=p-q;o=(w.*180)/;K=(180+o)./(180-o);fprintf('%.6f\n',K);plot(d,K,'b')xlabel('机架长度d变化时');ylabel('极位夹角/度');tilte('极位夹角变化图');———————————————————————————————————————a=5;d=30;c=29;b=6:1:54;m=((b-5).^2+59)./(60.*(b-5));n=(59+(b+5).^2)./(60.*(b+5));p=acos(m);q=acos(n);w=p-q;o=(w.*180)/;K=(180+o)./(180-o);fprintf('%.6f\n',K);plot(b,K,'b')xlabel('连杆长度b变化时');ylabel('极位夹角/度');tilte('极位夹角变化图');———————————————————————————————————————a=5;d=30;b=29;c=6:1:54;m=(1476-c.^2)./(1440);n=(2056-c.^2)./(2040);p=acos(m);q=acos(n);w=p-q;o=(w.*180)/;K=(180+o)./(180-o);fprintf('%.6f\n',K);plot(c,K,'b')xlabel('摇杆长度c变化时');ylabel('极位夹角/度');tilte('极位夹角变化图');c=28;d=30;b=29;a=5:1:27;m=(116+(29-a).^2)./(60*(29-a));n=(116+(29+a).^2)./(60*(29+a));p=acos(m);q=acos(n);w=p-q;o=(w.*180)/;K=(180+o)./(180-o);fprintf('%.6f\n',K);plot(a,K,'b')xlabel('曲柄长度a变化时');ylabel('极位夹角/度');tilte('极位夹角变化图');五.计算结果机架长度变化a b c d K5 30 29 65 30 29 75 30 29 85 30 29 95 30 29 105 30 29 115 30 29 12连杆长度变化摇杆长度变化曲柄长度变化六.计算结果分析1.当机架d增大,其余三杆不变时,K一直减小,减小速度先快后慢。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
机械原理大作业二、题目(平面机构的力分析)在图示的正弦机构中,已知l AB =100 mm,h1=120 mm,h2 =80 mm,W1 =10 rad/s(常数),滑块2和构件3的重量分别为G2 =40 N和G3 =100 N,质心S2 和S3 的位置如图所示,加于构件3上的生产阻力Fr=400 N,构件1的重力和惯性力略去不计。
试用解析法求机构在Φ1=60°、150°、220°位置时各运动副反力和需加于构件1上的平衡力偶M。
b Array二、受力分析图三、算法(1)运动分析AB l l =1滑块222112112/,/s m w l a s m w l v c c ==滑块3 21113113/cos ,sin s m l w v m l s ϕϕ==212113/sin s m w l a ϕ-=(2)确定惯性力N w l g G a m F c 21122212)/(==N w l g G a m F 121133313sin )/(ϕ-==(3)受力分析i F F i F F x R D R x R C R 43434343,=-= j F j F F R R R 232323-==j F i F j F i F F R x R y R x R R 2121121212--=+= j F F F y R x R R 414141+= 取移动副为首解副① 取构件3为分离体,并对C 点取矩由0=∑yF 得 1323F F F r R -= 由0=∑xF得 C R D R F F 4343=由∑=0CM得 2112343/cos h l F F R D R ϕ=②取构件2为分离体由0=∑x F 得 11212cos ϕR x R F F = 由0=∑y F 得 1123212sin ϕF F F R y R -=③取构件1为分离体,并对A 点取矩由0=∑x F 得 x R x R F F 1241= 由0=∑y F 得 y R y R F F 1241=由0=A M 得 1132cos ϕl F M R b =四、根据算法编写Matlab 程序如下:%--------------已知条件---------------------------------- G2=40; G3=100; g=9.8; fai=0; l1=0.1; w1=10; Fr=400; h2=0.8;%--------分布计算,也可将所有变量放在一个矩阵中求解------------------- for i=1:37a2=l1*(w1^2);a3=-l1*(w1^2)*sin(fai); F12=(G2/g)*a2;F13=-(G3/g)*l1*(w1^2)*sin(fai);FR23=Fr-F13;FR43D=FR23*l1*cos(fai)/h2;FR43C=-FR43D;FR12x=F12*cos(fai);FR12y=(-FR23)-F12*sin(fai);FR41x=FR12x;FR41y=FR12y;Mb=(-FR23)*l1*cos(fai);fai=fai+pi/18;fai1=fai*180/pi;f1(i,:)=[fai1,FR23,FR43D,FR43C,FR12x,FR12y,FR41x,FR41y,Mb];end%------------------输出结果---------------------------------------disp ' fai1 FR23 FR43D FR43C FR12x FR12y FR41x FR41y Mb 'con=[f1(:,1),f1(:,2),f1(:,3),f1(:,4),f1(:,5),f1(:,6),f1(:,7),f1(:,8),f1(:,9)];disp(con);%-------------------绘制线图--------------------------------------figure %输出构件3所受反力与角位移fai1的函数图线plot(f1(:,1),f1(:,2),'c-',f1(:,1),f1(:,3),'r-',f1(:,1),f1(:,4),'m-')grid ontitle('构件3所受各运动副反力')xlabel('fai1角的角位移rad')ylabel('各运动副约束反力N')text(100,520,'反力FR23')text(20,70,'反力FR43D')text(150,70,'反力FR43C')figure %输出构件2所受反力与角位移fai1的函数图线plot(f1(:,1),f1(:,5),'c-',f1(:,1),f1(:,6),'r-')grid ontitle('构件2所受各运动副反力')xlabel('fai1角的角位移rad')ylabel('各运动副约束反力N')text(200,0,'反力FR12x')text(100,-400,'反力FR12y')figure %输出构件2所受反力与角位移fai1的函数图线plot(f1(:,1),f1(:,7),'c-',f1(:,1),f1(:,8),'r-',f1(:,1),f1(:,9),'m-')grid ontitle('构件1所受各运动副反力和应加平衡力矩Mb')xlabel('fai1角的角位移rad')ylabel('各运动副约束反力N')text(150,0,'反力FR41x')text(100,-400,'反力FR41y')text(150,70,'平衡力矩Mb')五、输出结果主动件1旋转一周,即一个周期内各反力和平衡力Mb的大小变化fai1 FR23 FR43D FR43C FR12x FR12y FR41x FR41y Mb10.0000 400.0000 50.0000 -50.0000 40.8163 -400.0000 40.8163 -400.0000 -40.000020.0000 417.7192 51.4216 -51.4216 40.1962 -424.8069 40.1962 -424.8069 -41.137330.0000 434.9000 51.0840 -51.0840 38.3548 -448.8600 38.3548 -448.8600 -40.867240.0000 451.0204 48.8244 -48.8244 35.3480 -471.4286 35.3480 -471.4286 -39.059550.0000 465.5906 44.5829 -44.5829 31.2671 -491.8268 31.2671 -491.8268 -35.666360.0000 478.1678 38.4200 -38.4200 26.2362 -509.4349 26.2362 -509.4349 -30.736070.0000 488.3699 30.5231 -30.5231 20.4082 -523.7179 20.4082 -523.7179 -24.418580.0000 495.8870 21.2004 -21.2004 13.9600 -534.2418 13.9600 -534.2418 -16.960390.0000 500.4906 10.8637 -10.8637 7.0877 -540.6868 7.0877 -540.6868 -8.6909100.0000 502.0408 0.0000 -0.0000 0.0000 -542.8571 0.0000 -542.8571 -0.0000110.0000 500.4906 -10.8637 10.8637 -7.0877 -540.6868 -7.0877 -540.6868 8.6909120.0000 495.8870 -21.2004 21.2004 -13.9600 -534.2418 -13.9600 -534.2418 16.9603130.0000 488.3699 -30.5231 30.5231 -20.4082 -523.7179 -20.4082 -523.7179 24.4185140.0000 478.1678 -38.4200 38.4200 -26.2362 -509.4349 -26.2362 -509.4349 30.7360150.0000 465.5906 -44.5829 44.5829 -31.2671 -491.8268 -31.2671 -491.8268 35.6663160.0000 451.0204 -48.8244 48.8244 -35.3480 -471.4286 -35.3480 -471.4286 39.0595170.0000 434.9000 -51.0840 51.0840 -38.3548 -448.8600 -38.3548 -448.860040.8672180.0000 417.7192 -51.4216 51.4216 -40.1962 -424.8069 -40.1962 -424.8069 41.1373190.0000 400.0000 -50.0000 50.0000 -40.8163 -400.0000 -40.8163 -400.0000 40.0000200.0000 382.2808 -47.0591 47.0591 -40.1962 -375.1931 -40.1962 -375.1931 37.6473210.0000 365.1000 -42.8852 42.8852 -38.3548 -351.1400 -38.3548 -351.1400 34.3082220.0000 348.9796 -37.7781 37.7781 -35.3480 -328.5714 -35.3480 -328.5714 30.2225230.0000 334.4094 -32.0216 32.0216 -31.2671 -308.1732 -31.2671 -308.1732 25.6172240.0000 321.8322 -25.8587 25.8587 -26.2362 -290.5651 -26.2362 -290.5651 20.6870250.0000 311.6301 -19.4769 19.4769 -20.4082 -276.2821 -20.4082 -276.2821 15.5815260.0000 304.1130 -13.0016 13.0016 -13.9600 -265.7582 -13.9600 -265.7582 10.4013270.0000 299.5094 -6.5012 6.5012 -7.0877 -259.3132 -7.0877 -259.3132 5.2009280.0000 297.9592 -0.0000 0.0000 -0.0000 -257.1429 -0.0000 -257.1429 0.0000290.0000 299.5094 6.5012 -6.5012 7.0877 -259.3132 7.0877 -259.3132 -5.2009300.0000 304.1130 13.0016 -13.0016 13.9600 -265.7582 13.9600 -265.7582 -10.4013310.0000 311.6301 19.4769 -19.4769 20.4082 -276.2821 20.4082 -276.2821 -15.5815320.0000 321.8322 25.8587 -25.8587 26.2362 -290.5651 26.2362 -290.5651 -20.6870330.0000 334.4094 32.0216 -32.0216 31.2671 -308.1732 31.2671 -308.1732 -25.6172340.0000 348.9796 37.7781 -37.7781 35.3480 -328.5714 35.3480 -328.5714 -30.2225350.0000 365.1000 42.8852 -42.8852 38.3548 -351.1400 38.3548 -351.1400 -34.3082360.0000 382.2808 47.0591 -47.0591 40.1962 -375.1931 40.1962 -375.1931 -37.6473370.0000 400.0000 50.0000 -50.0000 40.8163 -400.0000 40.8163 -400.0000 -40.0000六、绘出的函数图线①构件3所受各运动副反力与的函数关系曲线1②构件2所受各运动副反力与ϕ的函数关系曲线1③构件1所受各运动副反力和平衡力矩Mb与ϕ的函数关系曲线1七、结题结果挑选出220150601、、=ϕ时各反力和平衡力矩Mb 制表如下:附:参考资料1、《机械原理》(第七版)孙桓陈作模葛文杰主编高等教育出版社2、《机械原理同步辅导及习题全解》(第七版)唐亚楠主编中国矿业大学出版社3、《数学实验初步》(MATLAB)肖海军编科学出版社。