51单片机的若干电路原理图
51单片机开发板电路原理图

4.7K
J-JDQ J-JDQ
1
2
A K
D1 4007
3
VCC JDQ JDQ
VCC
VCC
2
JDQ4001 1
3 2 1
6
5
R5 470
中断/独立按键
INT0 INT0
D/A转换
U3 VCCC8 104 D0 D1 D2 D3 D4 D5 D6 D7 DA_CS 1 P36 2 18 19 17 7 6 5 4 16 15 14 13 10 3 ~CS ~WR1 ~WR2 ILE ~XFER DI0 DI1 DI2 DI3 DI4 DI5 DI6 DI7 GND GND VDD VCC Jout J-out 20 1 2 3 4
VCC 16 2 6 15 10 9 C4 104 C6 104 C7 104 P31 P30 C2 30p C1 30p VCC CRY1 12M
电源
R11
VCC
扩展插针接口
P23 P22 P21 P20 P37 P36 VCC VCC
470 A
VCC
6 5 4 3 2 1
AT89S52 20 VCC 40
4*4矩阵键
VCC 0 SDA D LCD_RS 4 LCD_RW 8 LCD_E C SCL 2 1 D E F 1 LEDJDQ LED 2 9 A B 5 6 7 INT0 1 PS2DATA 2 P16 3 P17 VCC PS2DATA JPS2 1 2 3 4 5 6 PS/2
1 2
C10 104
ADC0831
DAC0832 DAC0832
AT24C02
VCC
LED彩灯
LED1 LCD_RS LED2 LCD_RW LED3 LCD_E LED4 BELL SCL LED5 SDA
51单片机设计的红外线遥控器电路图及工作原理

51单片机设计的红外线遥控器电路图及工作原理你家里是否有一个电视机遥控器或者空调机遥控器呢?你是否也想让它遥控其他的电器甚至让它遥控您的电脑呢?那好,跟我一起做这个“红外遥控解码器”。
该小制作所需要的元件很少:单片机TA89C2051一只,RS232接口电平与TTL电平转换心片MAX232CPE 一只,红外接收管一只,晶振11.0592MHz,电解电容10uF4只,10uF 一只,电阻1K1个,300欧姆左右1个,瓷片电容30P2个。
发光二极管8个。
价钱不足20元。
电路图及原理:主控制单元是单片机AT89C2051,中断口INT0跟红外接受管U1相连,接收红外信号的脉冲,8个发光二极管作为显示解码输出(也可以用来扩展接其他控制电路),U3是跟电脑串行口RS232相连时的电平转换心片,9、10脚分别与单片机的1、2脚相连,(1脚为串行接收,2脚为串行发送),MAX232CPE的7、8脚分别接电脑串行口的2(接收)脚、3(发送脚)。
晶振采用11.0592MHz,这样才能使得通讯的波特率达到9600b/s,电脑一般默认值是9600b/s、8位数据位、1位停止位、无校验位。
电路就这么简单了,现在分析具体的编程过程吧。
如图所示,panasonic遥控器的波形是这样的(经过反复测试的结果)。
开始位是以3.6ms低电平然后是3.6ms高电平,然后数据表示形式是0.9ms低电平0.9ms 高电平周期为1.8ms表示“0”,0.9ms低电平2.4ms高电平周期为3.3ms表示“1”,编写程序时,以大于3.4ms小于3.8ms高电平为起始位,以大于2.2ms小于2.7ms高电平表示“1”,大于0.84ms小于1.11ms高电平表示“0”。
因此,我们主要用单片机测量高电平的长短来确定是“1”还是“0”即可。
定时器0的工作方式设置为方式1:mov tmod,#09h,这样设置定时器0即是把GATE置1,16位计数器,最大计数值为2的16次方个机器周期,此方式由外中断INT0控制,即INT0为高时才允许计数器计数。
51单片机原理图

2.3 51单片机增强型学习系统各组成部份原理图及功能简介2.3.1 共阴极数码管动态扫描控制图2.2 51单片机增强型学习系统的四位共阴极数码管动态扫描硬件连接原理图AT89S51单片机P0口是一组8位漏极开路型双向I/O 口,也即地址/数据总线复用口。
作为输出口用时,每位能驱动8个TTL 逻辑门电路,对端口写“1”可作为高阻抗输入端用。
在访问外部数据存储器或程序存储器时,这组口线分时转换地址(低8位)和数据总线复用,在访问期间激活内部上拉电阻。
在Flash 编程时,P0口接收指令字节,而在程序校验时,输出指令字节,校验时,要求外接上接电阻。
AT89S51单片机P2口是一个带有内部上拉电阻的8位双向I/O 口,P2的输出缓冲级可驱动(吸收或输出电流)4个TTL 逻辑门电路。
对端口写“1”,通过内部的上拉电阻把端口拉到高电平,此时可作输入口,作输入口使用时,因为内部存在上拉电阻,某个引脚被外部信号拉低时会输出一个电流。
在访问外部程序存储器或16位地址的外部数据存储器(例如执行MOVX @DPTR 指令)时,P2口送出高8位地址数据。
在访问8位地址的外部数据存储器(如执行MOVX @Ri 指令)时,P2口线上的内容(也即特殊功能寄存器SFR 区中P2寄存器的内容),在整个访问期间不改变。
Flash 编程或校验时,P2亦接收高位地址和其它控制信号。
在上面的硬件连接原理图里,我们用到的是P0和P2口控制四位数码管显示的。
四位数码管显示的方式是动态扫描显示,动态扫描显示是单片机中应用最为广泛的一种显示方式之一。
其接口电路如上图是把所有显示器的8个笔划段a-h同名端连在一起由单51单片机增强型学习系统片机的P0.0~P0.7控制,而每一个数码管的公共极(阴极)是各自独立地受单片机P2.7~P2.4控制。
CPU向字段输出口P0口送出字形码时,所有数码管接收到相同的字形码,但究竟是那个数码管亮则取决于P2.7~P2.4的输入结果,所以我们就可以自行决定何时显示哪一位了。
51单片机智能小车蓝牙遥控+测速程序源代码、电路原理图和电路器件表

51单片机智能小车蓝牙遥控+测速程序源代码、电路原理图、电路器件表HC-05蓝牙模块测速模块智能小车蓝牙遥控+测速是:可以用智能小车手机蓝牙遥控APP 控制智能小车的前进,后退,左转,右转和停止。
同时利用测速模块测量智能小车的运动速度,并将智能小车的速度显示在液晶屏上。
智能小车蓝牙遥控+测速程序流程图如下:下文主要提供了51单片机智能小车蓝牙遥控+测速完整程序源代码、电路原理图以及电路器件表。
智能小车核心板原理图STC15W4K56S4智能小车核心板器件(BOM)表实物图060306030603PIN插针PIN2x1406030603直插LQFP7x7-48 STC15W4K56S4智能小车核心板正面STC15W4K56S4智能小车核心板背面智能小车驱动板原理图51单片机(STC15W4K56S4)智能小车驱动板器件(BOM)表实物图直插直插直插直插直插直插直插直插直插直插PIN与PIN之间的间隔2.54mm插电池盒PIN与PIN间隔2.54mm,插电机3PIN插针,针与针间隔2.54mm插舵机红色插针和黑色插针3.3V红色插针、GND黑色插针PIN红色插针和黑色插针5V PIN红色插针和黑色插针VINPIN与PIN之间的间隔2.54mm 插MQ2模块针与针间隔2.54mm插GP2Y1014AU模块针与针间隔2.54mm语音播报实验时,串口4插语音播报模块针与针间隔2.54mmIO扩展用,没有必要不要焊接针与针间隔2.54mm插DHT11模块用4PIN插针,针与针间隔2.54mm用杜邦线连接超声波模块针与针间隔2.54mm插蓝牙模块(要原厂原装的)用8PIN插针,针与针间隔2.54mm杜邦线连接红外循迹避障模块用4PIN插针,针与针间隔2.54mm用杜邦线连接测速模块针与针间隔2.54mm插5V的LCD1602液晶MPU6050不要焊接。
也可以用导线直接将但一定要注意不要短接直插直插直插电阻直插直插电阻这直插电阻直插电阻电阻电阻5V3.3V5V红外遥控信号接收管直插针与针间隔2.54mm,插MPU6050模块,目前只是在电路图上保留了该接口,并无相关实验程序。
51单片机最小系统电路图及实验
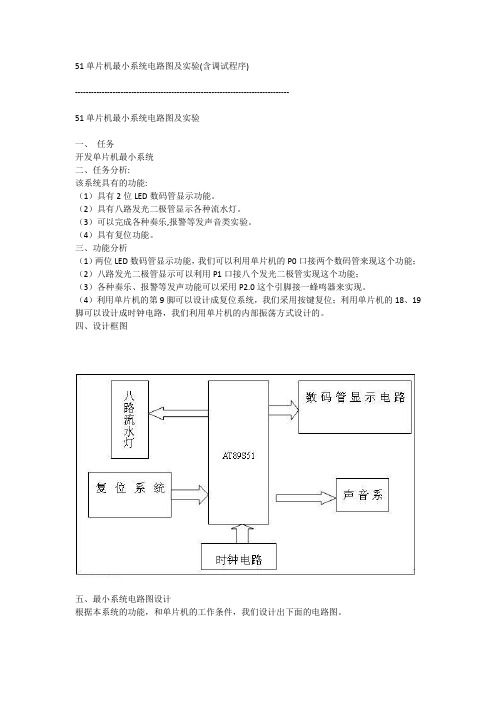
51单片机最小系统电路图及实验(含调试程序)--------------------------------------------------------------------------------51单片机最小系统电路图及实验一、任务开发单片机最小系统二、任务分析:该系统具有的功能:(1)具有2位LED数码管显示功能。
(2)具有八路发光二极管显示各种流水灯。
(3)可以完成各种奏乐,报警等发声音类实验。
(4)具有复位功能。
三、功能分析(1)两位LED数码管显示功能,我们可以利用单片机的P0口接两个数码管来现这个功能;(2)八路发光二极管显示可以利用P1口接八个发光二极管实现这个功能;(3)各种奏乐、报警等发声功能可以采用P2.0这个引脚接一蜂鸣器来实现。
(4)利用单片机的第9脚可以设计成复位系统,我们采用按键复位;利用单片机的18、19脚可以设计成时钟电路,我们利用单片机的内部振荡方式设计的。
四、设计框图五、最小系统电路图设计根据本系统的功能,和单片机的工作条件,我们设计出下面的电路图。
六、元器件件清单的确定:数码管:共阴极2只(分立)电解电容:10UF的一只30PF的电容2只220欧的电阻9只4.7K的电阻一只1.2K的电阻一只4.7K的排阻一只,12MHZ的晶振一只有源5V蜂名器一只AT89S51单片机一片常开按钮开关1只紧锁座一只(方便芯取下来的,绿色的)发光二极管(5MM红色)8只万能板电路版15*17CMS8550三极管一只4.5V电池盒一只,导线若干。
七、硬件电路的焊接按照原理图把上面的元件焊接好,详细步骤省略。
八、相关程序设计针对上面的电路原理图,设计出本系统的详细功能:(1)、第一个发光二极管点亮,同时数码管显示“1”。
(2)、第二个发光二极管点亮,同时数码管显示“2”。
(3)、依次类推到第八个发光二极管点亮,同时数码管显示“8”。
以上出现的是流水灯的效果(4)、所有的发光二极管灭了,同时数码管现实“0”。
51单片机点亮一盏LED灯的原理解析
51 单片机点亮一盏LED 灯的原理解析
首先应该了解51 单片机最小系统:51 最小系统也称为51 最小应用系
统,是指用最少的元件组成的51 单片机可以工作的系统。
如图2.1.1 所示,51 最小系统一般应该包括:单片机、晶振电路、复位电路。
晶振电路的原理及组成,作用:
在单片机系统里晶振的作用非常大,他结合单片机内部的电路,产生单片机所必须的时钟频率,单片机的一切指令的执行都是建立在这个基础上的,晶振的提供的时钟频率越高,那单片机的运行速度也就越快。
简单地说,没有晶振,就没有时钟周期,没有时钟周期,就无法执行程序代码,单片机就无法工作。
单片机工作时,是一条一条地从RoM 中取指令,然后一步一步地执行。
单片机访问一次存储器的时间,称之为一个机器周期,这是一个时间基准。
个机器周期包括12 时钟周期。
如果一个单选择了12MHz 晶振,它的
时钟周期是1/12us,它的一个机器周期是12&TImes;(1/12)us,也就是
1us。
组成:晶振,负载电容,内部电路。
51单片机智能小车PWM调速前进程序源代码、电路原理图和器件表
51单片机智能小车PWM调速前进程序源代码、电路原理图、电路器件表从控制电路角度划分,智能小车电路板分为核心板和驱动板。
核心板上的处理器的芯片型号是:STC15W4K56S4,这是一款51单片机。
驱动板上有电源电路、电机驱动电路以及一些功能模块接口。
智能小车前进只要控制智能小车四个轮子向前转动就可以了。
智能小车四个轮子由四个直流减速电机驱动。
直流减速电机驱动芯片采用L293D,一片电机驱动芯片L293D可以驱动两个直流减速电机,智能小车用到4个直流减速电机,需要用到两片L293D电机驱动芯片。
但有时候我们需要控制智能小车的速度,不希望智能小车全速前进。
比如在“智能小车循迹实验”中,如果智能小车速度过快,来不及反应做出方向的调整,智能小车会很容易跑离轨迹,这样就需要调整控制智能小车的速度了。
那么怎么样实现智能小车前进速度的调节呢?调节智能小车的速度,实际上是调节电机的运转速度,PWM调速是目前电机的主流调速方式。
智能小车采用脉宽调制(PWM)的办法来控制电机的转速,从而控制智能小车的速度。
在此种情况下,电池电源并非连续地向直流电机供电,而是在一个特定的频率下为直流电机提供电能。
不同占空比的方波信号,调节对直流电机的通断电,能起到对直流电机调速作用。
这是因为电机实际上是一个大电感,它有阻碍输入电流和电压突变的能力,因此脉冲输入信号被平均分配到作用时间上。
这样,改变L293D使能端EN1和EN2上输入方波的占空比就能改变加在电机两端的电压大小,从而改变了直流电机转速。
智能小车PWM调速前进程序如下:首先,定义了2个变量,这2个变量用于设置智能小车的速度。
unsigned char pwmval_left_init=6; //调节此值可以调节小车的速度。
unsigned char pwmval_right_init=6; //调节此值可以调节小车的速度。
通过以下函数初始化定时器0,每1毫秒中断一次。
void Timer0_Init(void) //定时器0初始化{TMOD=0x01;TH0=0xf8;TL0=0xcd;TR0=1;ET0=1;EA=1;}下面我们看定时器0的中断处理函数。
第2章 MCS-51系列单片机的结构及原理
2.3 引脚功能——封装形式
40P6-PDIP
单 片 机 技 术
2.3 引脚功能——引脚含义
P1. 0 P1.1 P1.2 P1.3 P1.4 P1.5 P1.6 P1.7 RST RXD/ P3. 0 TXD/ P3.1 INT0/ P3.2 INT1/ P3.3 T0/ P3.4 T1/ P3.5 WR/ P3.6 RD/ P3.7 XTAL2 XTAL1 VSS 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 40 39 38 37 36 35 34 33 32 31 30 29 28 27 26 25 24 24 22 21 VCC P0. 0 P0.1 P0.2 P0.3 P0.4 P0.5 P0.6 P0.7 EA ALE PSEN P2.7 P2.6 P2.5 P2.4 P2.3 P2.2 P2.1 P2. 0
2mcs51系列单片机的内部总体结构88微处理器运算部件b数据存储器ramp0口p2口程序存储器特殊功特殊功能寄存器sfrromepromvccvss图21mcs51单片机的基本结构控制部件p1口p3口串行口定时计数器中断系统88xtal1xtal2psenaleeareset端口0驱动器端口2驱动器ram地址锁存器ram1288端口0锁存器端口2锁存器rom4k8b寄存器程序地址寄存器缓冲器寄存器vcc5vvss堆栈指针spacctmp2tmp1p00p07p20p27图22mcs51片内总体结构框图rstpc1寄存器pcdptr指针p10p17psw端口3锁存器端口1锁存器端口1驱动器端口3驱动器scontl0tmodth1iepconth0sbuftxrx中断串行口和定时器逻辑tcontl1iposcp30p37alepsenxtal2xtal1alu指令寄存器定时与控制指令译码器返回本节2
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
51单片机的若干电路原理图
单片机 2007-10-23 20:36:31 阅读198 评论0 字号:大中小订阅
利用下面这些原理图,就可以自己动手做个简单的实验板啦~~~~
1 外接电源供电电路及电源指示灯
在单片机实训板上为系统设计了一个外接电源供电电路,这个电源电路具备两种电源供电方式:一种是直接采用PC的USB接口5V直流电源给实训板供电,然后在电源电路中加入一个500mA电流限制的自恢复保险丝给PC的USB电源提供了保护的作用;另一种是采用小型直流稳压电源供电,输出的9V直流电源加入到电源电路中,通过LM7805稳压芯片的降压作用,给实训板提供工作所需的5V电源。
如图2.4所示为采用LM7805稳压芯片进行降压供电的电源电路。
图2.4 外接电源供电电路
同时,为了显示外接电源给实训板提供了电源,在系统中增加了电源指示灯电路,如图2.5。
发光二极管工作在正常工作状态时,流过LED的电流只需要5~10mA左右就行,在电路中采用白发红高亮LED,所以可以取5mA左右
的电流值,通过计算,可知:连接LED的限流电阻的阻值可以采用680Ω。
图2.5 电源指示灯电路
2 系统复位电路
复位是单片机的初始化操作,只要给RESET引脚加上2个机器周期以上的高电平信号,即可使单片机复位。
除了进入系统的正常初始化之外,当程序运行出错或是操作错误使系统处于死锁状态时,为了摆脱死锁状态,也需要按复位键重新复位。
在系统中,为了实现上述的两项功能,采用常用的按键电平复位电路,如图2.6所示。
2.6 按键电平复位电路
从途中可以看出,当系统得到工作电压的时候,复位电路工作在上电自动复位状态,通过外部复位电路的电容充电来实现,只要Vcc
的上升时间不超过1ms就可以实现自动上电复位功能。
在本系统中,采用10uF的电容和10kΩ的电阻来实现复位电路。
当系统出错时,直接按开关实现模拟系统上电复位的功能,从而实现系统重新复位启动。
3 时钟电路
时钟电路是用于产生单片机工作时所必需的时钟信号。
时钟是单片机的心脏,单片机各功能部件的运行都是以时钟频率为基准的,有条不紊地一拍一拍地工作。
时钟频率直接影响单片机的速度,时钟电路的质量也直接影响单片机系统的稳定性。
在本系统中采用内部时钟方式的电路,如图2.7所示。
图2.7 内部时钟方式电路图
电路中的电容C1、C2典型值为30±10 pF。
外接代内容的值虽然没有严格的要求,但是电容的大小会影响振荡器的稳定性和起振的快速性。
同时,在系统中采用11.0592MHz的晶体振荡器来产生时钟脉冲。
一方面,可以满足系统在设计时的机器周期的需要;另一方面,在进行串行口通讯的时候能够提供精准的通讯波特率。
4 四位数码管显示电路
四个数码管在系统中可以作为时钟显示、计数显示、遥控码显示等各种显示电路,电路如图2.10所示。
数码管是LED的一种集成,将LED通过一定的形式安排在相应的位置就构成了数码管,当相应的段码和位码协同操作,于是就产生了数码的显示。
在系统中,采用四位一体的集成数码显示器,内部结构为共阳方式。
在整体的数码管显示电路中,由P0口为数码管提供相应的段码,分别为a、b、c、d、e、f、g、dp,组成显示相应数码的字段;由P2口的高四位构成四位数码管的位选信号端,分别确定让哪个位的数码管进行点亮操作。
电路结构中,共阳端的电源由三极管S8550来进行控制,当连接P2口的基极信号端接收到单片机的低电平信号时就导通,于是数码管的位选端得到5V电源,提供数码管的显示操作。