(useful-定位)基于ZigBee无线传感器网络的室内定位系统设计
基于ZigBee无线传感器网络的室内定位系统研究与设计_朱寒
Ne w Application新应用72引言:目前,社会正处于信息时代,智能化与信息化是时代最为显著的特点,为了满足人们的无线定位需求,无线定位系统随之出现,该系统结合了各种技术,主要有信息采集处理、网络通讯技术、嵌入式软硬件与无线数据传输等。
随着各项技术的发展,ZigBee 无线传感器网络满足了人们的室内定位需求,它具有诸多的优点,如:可靠性、准确性、灵活性与高效性等。
一、ZigBee 无线传感器网络的概况1.1 ZigBee 定位系统的设计ZigBee 无线传感器网络定位系统是由两部分组成的,分别为ZigBee 无线网络定位系统与CAN 总线数据传输系统。
两个系统均具有先进性,其网络结构结合了有线与无线,有线部分主要承担着传输数据的任务,无线部分主要承担着采集数据的任务。
无线传感器网络其设备的安装十分便捷,此时的定位系统布线具有广泛性与全面性,同时此系统具有可靠性、稳定性与灵活性的特点。
ZigBee 无线传感器网络的设计要求如下:1、功耗低。
在设计时,首先要解决的问题便是无线传感器网络节点的功耗问题,该网络的节点具有众多的数量,同时其分布也具有广泛性,在此基础上,供电设备的更换具有较高的难度,此时对节点功耗有着严格的要求,不仅要保持较低的功耗,还要保持较长的供电时间。
2、成本低。
无线传感器网络节点设计的优劣是有其成本进行衡量的,虽然其节点的布置工作量较大,但仍要注重对其成本的控制,唯有保证成本的最低值,才能够实现节点的广泛运用。
此时,无线传感器节点的设计要具有简洁性。
3、微型化。
网络设备节点要保证其体积的最小化,在不影响目标系统特性的基础上,对软件程序进行设计,此时的模块要具备简洁性与精准性,避免冗余代码的出现;同时软件代码要保持独特性与针对性,不同的系统配有相应的代码。
4、稳定性。
网络节点的稳定性主要是对硬件的要求,即便外部环境发生变化,其硬件也要保持稳定的工作,具体的模块包括微处理器、无线通信、电源模块与传感器模块[1]。
基于无线传感器网络的室内定位系统设计

基于无线传感器网络的室内定位系统设计无线传感器网络(Wireless Sensor Networks,WSNs)是一种由大量分布式、自主工作的传感器节点组成的网络系统。
每个节点都具有感知、处理和无线通信能力,可以通过互相协作完成各种任务。
而室内定位系统是指通过无线信号、传感器数据等技术手段,在室内环境中实现对移动目标的精确定位。
本文将探讨基于无线传感器网络的室内定位系统设计,旨在帮助读者了解该系统的原理、组成和实现方法。
一、系统原理基于无线传感器网络的室内定位系统利用无线信号的传播特性来测量目标位置。
通常,系统中的传感器节点会收集目标的信号强度、到达时间等相关数据,并将这些数据发送给中心控制器。
中心控制器通过处理节点收集的数据,利用定位算法来计算目标的位置。
二、系统组成基于无线传感器网络的室内定位系统主要由以下组件构成:1. 传感器节点:每个传感器节点都装备有感知、处理和通信能力。
它们可以通过无线连接与中心控制器进行数据交换,并收集目标的相关信息。
2. 中心控制器:中心控制器是系统的核心部分,负责接收和处理来自传感器节点的数据。
它通过定位算法计算目标的位置,并将结果显示给用户。
3. 定位算法:定位算法是室内定位系统的核心技术之一。
常用的定位算法包括信号强度法、到达时间差法、测距法等。
根据具体的应用场景和要求,选择合适的算法可以提高系统的精度和可靠性。
4. 数据传输协议:为了保证传感器节点和中心控制器之间的数据传输安全可靠,系统需要采用适当的数据传输协议,如Wi-Fi、蓝牙等。
5. 用户界面:用户界面是室内定位系统与用户交互的窗口。
通过用户界面,用户可以实时查看目标位置、设置系统参数等。
三、系统实现方法基于无线传感器网络的室内定位系统可以使用多种技术实现。
下面介绍其中两种常见的实现方法:1. 基于信号强度法的室内定位系统:该方法通过节点接收到目标发出的无线信号,测量信号的强度,通过信号强度衰减模型计算目标位置。
基于ZigBee技术的室内定位系统研究与实现概要
大连理工大学硕士学位论文基于ZigBee技术的室内定位系统研究与实现姓名:李同松申请学位级别:硕士专业:通信与信息系统指导教师:刘军民20081201大连理工大学硕士学位论文摘要随着现代通信技术和无线网络的快速发展,人们对定位与导航的需求日益增大,尤其在复杂的室内环境,如机场大厅、展厅、仓库、超市、图书馆、地下停车场、矿井等环境中,常常需要确定移动终端、设施与物品在室内的位置信息。
但是受定位时间、定位精度以及复杂室内环境等条件的限制,比较完善的封闭空间定位技术目前还无法很好地利用。
本文的重点就在于设计并实现了一种低成本、实用的无线传感器定位系统。
基于IEEE802.15.4标准的Zigbee技术是一种新兴的低成本、低功耗、低速率的短距离无线通信技术。
随着Zigbee技术越来越多地被用于家庭自动化、遥测遥控、汽车自动化和医疗护理等应用领域,基于ZigBee网络的实时定位问题正日益受到关注。
本论文主要研究了基于ZigBee网络的室内无线定位技术,并在此基础上实现了一个针对办公室及楼道环境的定位系统。
基于大量的实测数据,通过对数据的详细分析,总结出几种实用定位方法的特点,提出一种基于环境信息的混合定位法,这种方法融合了RSSI和LQI。
本文实现了一个定位系统,它包括硬件平台、节点通信程序和上位机监测软件三部分。
本文详细介绍了三部分的实现。
其中,硬件平台以集成了射频与51微控制器的CC2430芯片为核心,该平台包括射频模块、辅助电路、功能指示电路等。
实际节点可以根据其类型特点,选取硬件电路的不同部分加以实现。
节点通信程序的开发以TI公司提供的Z.Stack协议栈为基础,论文详细介绍了节点间通信流程,给出了各类节点详尽的通信实现方法。
在VC++6.O环境中编写了上位机监测软件,论文给出了详细的软件实现方案。
论文最后对定位系统进行了实际测试。
测试表明:本系统达到了设计要求,是一个低成本、易实现的系统。
同时,针对实验中发现的不足,给出了进一步完善功能的方法。
基于ZigBee的室内无线定位系统的设计
2019年6期设计创新科技创新与应用Technology Innovation and Application基于ZigBee 的室内无线定位系统的设计鲁哲,秦实宏(武汉工程大学电气信息学院,湖北武汉430205)1概述AGV 是自动导航车的英文缩写。
它配备了非接触式自动引导装置,如电磁或光学和独立寻址系统[1]。
近年来,在快速先进的网络技术背景下,许多学者通过网络锁定了AGV 智能车无线通信方面的探究方向。
电信网络发展的前提和基础是计算机网络和自动控制技术,他们用于运输和环境监测,工业自动化和智能家居系统,还可以实时监控相关信息,例如现场参数的波动[2]。
无线通信技术的出现和应用也使有线传输成为一种新的方式。
随着时代的快速发展,ZigBee 无线通信技术已成为公众关注的关键,它具有双向性,而且间距小,成本低,复杂度低,功耗小,数据速率小[3]。
由它创建的传感器网络随处可见,远程监控和自动控制领域的应用频率相对较高。
它特别适用于易于组装并且通信数据量不太高的情况[4]。
在当代社会,在科技进步的推动下,生活和生产的便利性越来越受到人们的青睐。
与此同时,AGV 技术的应用已开始成为越来越多相关人员的研究对象。
如今,大多数AGV 通常将电池组装为驱动器,并具有用于无人运输操作的非接触式导航设备。
通过上位机监控技术可以更好的发挥AGV 的功能。
通过精心规划的路径和操作,AGV 可以更精确地在路径上行走并精确到达指定位置。
在现在大多数生产物流领域中,作为“不用付工资的搬运工”,AGV 技术越来越多的得到大家的偏爱,特别是在某些对速度还有搬运频率有特殊要求的工作区间等伴随一定危险的工业领域,与人工相比,AGV 小车拥有的优势非常明显。
目前,在现代的工作区,上位机实时监控的基础是建立室内无线定位系统。
随着工业技术和电子产品技术的快速发展,一些工业生产领域对室内无线定位技术的要求越来越高。
通过研究,本文设计了一种低成本、相对简单、易于实现的室内无线定位系统,可以更好的实现AGV 在室内环境中的实时监控和定位。
基于ZigBee和RSSI测距算法的室内定位系统设计
基于ZigBee和RSSI测距算法的室内定位系统设计作者:蓝芳萍张文锦殷旭东来源:《软件导刊》2018年第02期摘要:移动终端室内定位技术需求日益增加,解决方案多种多样,但已有技术存在实现困难、硬件功耗大、环境变化不适应等问题。
阐述了基于ZigBee协议和RSSI测距算法实现室内定位的基本原理,并以此理论为基础设计了室内定位系统。
设计了室内定位系统整体架构,阐述了室内定位系统关键技术,包括RSSI测距模型、参数优化、节点RSSI阈值处理、盲节点坐标计算及ZigBee自组网。
选取实验楼进行测试,结果表明,基于该技术的定位系统精确度较高,且具有节能和环境适应性好等优点。
关键词:室内定位;ZigBee技术;RSSI测距DOIDOI:10.11907/rjdk.172262中图分类号:TP319文献标识码:A 文章编号:1672-7800(2018)002-0105-030 引言室内定位技术[1]蓬勃发展,技术方案有基于测距技术和基于非测距技术两大类。
基于测距技术的算法有AOA、TOA、TDOA和RSSI;基于非测距技术的算法有DV-HOP、质心算法等[2] 。
室内定位技术多样、室内环境复杂,对该技术的研究较多。
如唐铭等[3]研究比较了TDOA与TOA这两种基于测距技术的方法,得出TDOA的定位精度更高但实现难度较大的结论;魏培等[3-4]将三角形质心算法改进为内三角形质心算法,用以解决基于非测距质心算法定位精度低、稳定性差等问题,但算法流程多,实现较复杂;干建勇等[5]为了解决DV-HOP算法精度低的问题,提出改进算法ECDV-HOP,但改进后存在通信量和计算量明显增大,算法代价高等问题。
RSSI测距[6]算法难度较低,易于实现,不需要额外增加硬件设施,是大多数室内定位系统的首要选择。
在蓝牙、WiFi、超声波、ZigBee等短距离无线通信技术中,蓝牙通信技术虽然成本功耗低,但传输性能差稳定性差;WiFi在生活中常见,用于室内定位可说是一举两得,但现有的WiFi定位技术依赖于热点位置,若要实现较准确的定位,需布置充足的WiFi热点,成本高功耗大;超声波技术用于室内定位准确度高,但易受障碍物影响且设备成本高。
基于ZigBee的无线传感器网络定位系统的设计概要

基于ZigBee的无线传感器网络定位系统的设计摘要:基于ZigBee技术的无线传感器网络定位系统的设计与实现。
该系统由参考title="节点">节点、移动节点、网关节点和嵌入式Web服务器组成,本文详细介绍了其硬件设计和软件设计。
经试验验证,该系统定位效果好,实用性强。
关键词:无线传感网;节点;嵌入式Web服务器无线传感器网络[1]WSNs(Wireless Sensor Networks被广泛应用于环境探测、天气预报、安全、监控以及分布式计算和目标区域成像等领域,在军事、医疗和民用等方面的应用具有深远意义。
在传感器网络中,位置信息对传感器网络的监测活动至关重要,事件发生的位置或获取信息的节点位置是传感器监测信息中所包含的重要信息,没有位置的监测消息往往是毫无意义的。
因此,确定事件发生的位置或获取消息的节点位置是传感器网络最基本的功能之一,对传感器网络应用的有效性起着关键作用。
ZigBee技术[2]是一个具有统一技术标准的短距离无线通信技术,其PHY层和MAC层协议为IEEE802.15.4协议标准。
本文提出的无线传感器网络工作在全球通用的ISM(Industrial Scientific and Medical免付费频段2.4 GHz上,其数据传输速率为250 Kb/s,划分为16个信道。
与蓝牙或802.11等同属于短距离无线通信的技术相比,ZigBee技术具有先天优势。
ZigBee 设备为低功耗设备,具有能量检测和链路质量指示的功能。
同时,由于采用了碰撞避免机制(CSMA-CA,避免了发送数据时的冲突。
在网络安全方面,采用了密钥长度为128 bit的加密算法,对所传输的数据信息进行加密处理,保证了数据传输时的高可靠性和安全性。
用ZigBee技术组成的无线传感器网络结构简单、体积小、性价比高、放置灵活、扩展简便、成本低、功耗低、安全可靠,这种新兴的无线传感器网络必将有广泛的应用前景。
基于ZigBee的室内定位系统设计与研究
Z HANG J i a n - g u o HAN Ta o LI U J i a WE I Xi n
( S c h o o l o f E l e c t r i c a l a n d I n f o r ma t i o n En g i n e e r i n g , An h u i Un i v e r s i t y o f S c i e n c e a n d T e c h n o l o g y , Hu a i n a n Ai h u i 2 3 2 0 0 1 , C h i n a )
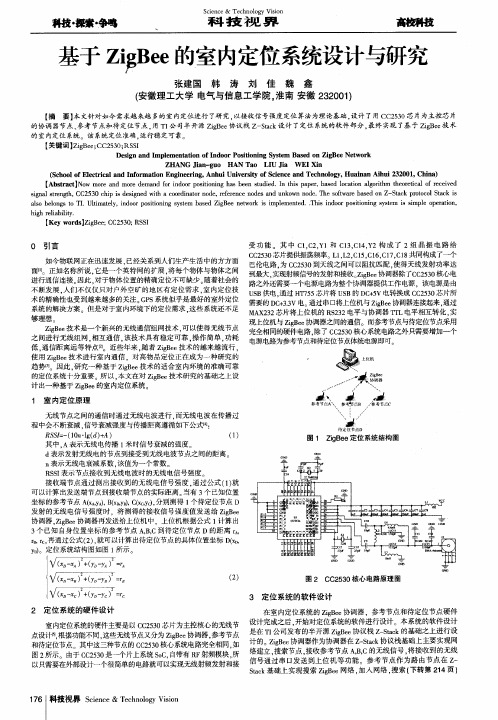
受 功 能 。其 中 c 1 , c 2 . Y 1 和c 1 3 , C 1 4 , Y 2 构 成 了 2组 晶 振 电 路 给 C C 2 5 3 0 芯片提供振荡频率 。 L 1 , L 2 , C 1 5 , C 1 6 , C 1 7 , C 1 8 共 同构成 了一个 巴伦电路. 为C C 2 5 3 0到天线之间可以阻抗 匹配 . 使得天线发射 功率达 到最大 , 实现射频信号的发射和接收 z i g B e e 协调器除了C C 2 5 3 0 核心电 路之外还需要一个 电源 电路为整个协调器提供工作电源.该 电源是 由 U S B供电. 通过 H T 7 5 5 芯片将 U S B的 D C + 5 V电转换成 C C 2 5 3 0 芯片所 需要的 D C + 3 . 3 V电 通过 串口将上位机与 Z i g B e e 协调器连接起来 . 通过 M A X 2 3 2 芯片将上位机的 R S 2 3 2 电平 与协调器 , r I . L电平相互转化 , 实 现上位机与 z i g B e e 协调器之 间的通信 。而参考节点与待定位节点采用 完全相同的硬件 电路 . 除了 C C 2 5 3 0 核心系统 电路之外只需要增加一个 电源电路为参考节点和待定位节点体统电源即可
基于ZigBee网络的室内定位系统的设计与实现

基 于 Zg e iB e网络 的室 内定 位 系统 的设 计 与 实现
白旭华 , 张瑞峰 , 肖萌 , 张 王桂英
( 天津 大学 电子信 息工程学 院 , 天津 30 7 ) 0 02 摘 要 : 对 当前室 内定位 系统成本高、 针 精度低 、 可靠性差 的缺点 , 设计 出了一种基 于 Zg e iB e无线传 感 网络 的无线
whc o i e h i a c — a u ig c l r t n p o e s a d t e e t e lc l ai n p o e s is ,c lu ae t e d sa c ih c mb n st e d s n e me s r ai a i r c s n h n i o ai t r c s .F rt ac lt h itn e t n b o r z o
De i n a d i p e e a i n o n o sto i y t m s g n m l m nt to f i do r po ii n ng s s e ba e n Zi Be e wo k sdo g en t r
BAIXu h a,ZHANG if n —u Ru —e g,ZHANG a — n Xio me g,W ANG iy n Gu — i g
ss m—nci r ue yTxsIs u n ( I ,t ow r bsd o —tc rt o Saki as e n st T , yt o—hppo cdb ea nt met T ) h sf ae ae n ZSak po cl t s l bl g I e d r s e t o c o o o
Ke r s iB e;lc l ai n itn e me s rn ;r c ie in l t n h y wo d :Z g e o ai t ;d s c — a u i g e ev d sg a r g z o a s et
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
福建电脑2010年第9期基于ZigBee无线传感器网络的室内定位系统设计江晓飞,王英俊,王武,蔡逢煌(福州大学电气工程与自动化学院福建福州350108)【摘要】:研究设计了一种基于ZigBee无线传感器网络的室内定位系统。
该系统通过待定位点发射红外信号和超声波信号到达各个参考节点的时间差计算出待定位点到达参考点的距离,再通过三点定位法计算出待定位点的坐标信息。
文章介绍了ZigBee技术,TDOA定位原理,设计了红外传感器、超声波传感器的发射、接收模块,主芯片hc9s12dg128外围接口电路,并完成了相关的软件设计。
【关键词】:ZigBee,无线传感器网络,TDOA,三点定位0、引言定位通常是指确定地球表面某种物体在某一参考坐标系中的位置,它能为导航提供信息。
在无线传感器网络中,节点所采集到的数据,(如温度,湿度等)必须与测量坐标系内的位置结合,所采集的信息数据才有意义。
在智能机器人研究中,定位为导航提供基础和保障。
当今使用最广泛,也是最成熟的定位技术是全球定位系统(GPRS,Global Positioning System),它能在全球范围内全天候地进行定位,具有定位精度高,抗干扰能力强等特点[1],但是它适用于无遮挡的室外环境,无法满足室内定位的需要。
无线传感器网络融合了网络通信技术,微机电系统机技术和传感器技术,是当前国际上备受关注、由多学科交叉的一个新兴前沿热点领域[2]。
它能够协作地实时监测、感知和采集各种环境或监测对象的信息,并对其进行处理,传送到这些信息的用户.通过建立传感器网络,再将传感器信息发送至PC上位机计算处理可以得到传感器网络区域内的各种信息。
目前的定位算法从定位手段上分有两大类:基于测距算法(ranged-based)和非测距算法(range-free)。
常用的测距方法包括RSSI(Received Signal Strength Indicator)法、TOA(Time of Arrival)法、TDOA(Time Difference On Arrival)法和AOA(Angle of Arrival)法。
非测距的定位算法有DV-hop算法、DV-distance算法、APIT算法、Amorphous算法和质心算法[2],[3]。
本文研究基于ZigBee无线传感器网络的室内定位系统,采用红外传感器,超声传感器进行基于测距的TDOA算法.该系统结构简单,可拓展性强。
1、ZigBee技术简介无线传感器网络一般由传感器子节点,终端节点,上位机构成。
传感器节点在区域内取得各种信息并通过无线网络传给终端节点,终端节点接收子节点信息并传输给上位机,上位机接收终端节点信息处理显示给用户。
无线网络节点间信息的传输通常使用ZigBee 技术。
ZigBee技术是一种新兴的短距离、低速率无线网络技术,主要应用于段距离范围之内并且数据传输速率不高的各种电子设备之间,尤其适用于传感器。
它具有以下特点:数据传输速率低、有效范围小、工作频段灵活、省电、时延短、可靠、成本低、网络容量大[4],[5]。
2、TDOA定位原理。
不同的信号在空气中的传播速度不同,通过不同传播速度的信号到达的时间差可计算出两点之间的距离。
本文使用红外和超声两种信号到达参考点的时间差进行测距。
红外信号和超声信号同时从同一点发射,红外信号传播速度快,先到达已知点后开始计时,等超声信号到达已知点后停止计时,这段时间即是两种信号到达的时间差。
设两个点之间的距离为s,红外信号传播速度为v1(光速),到达已知点所需时间为t1,超声信号传播速度为v2(声速),到达已知点所需时间为t2。
两种信号到达同一个参考节点的时间差为t2-t1。
(1)(2)由于光速为30公里每秒,实验测距范围小于10米,红外信号传播所需时间小于3*10E-8秒,且远小于超声信号传播的时间,在测量精度内可忽略所以(2)式可转化为(3)3、红外、超声传感器原理红外传感器包括了红外发射管和红外接收管。
对红外发射管供电就会发射出不可见的红外光。
红外接收管对一定频率的红外光敏感,当接收到一定频率的红外光时会引起其信号脚电压的变化。
本文将红外接收管的信号脚的高低电平用于控制计时器的开始信号。
超声传感器包括超声波发射器T和超声波接收器R。
给发射器T提供一定频率的驱动信号,就会向空气221*()s v t t??基金项目:福州大学科研资助项目(2009-XQ-05)13福建电脑2010年第9期中发射超声波,接收器R接收到该超声波就会引起其信号脚电平的变化。
本文的超声传感器选用T40-16型号,外径16mm,中心频率40kHz,最佳使用频率39~ 41kHz,当输入脉冲的占空比为50%时有最佳的驱动效果。
本文选用555多谐振荡器分别来产生38KHZ和40KHZ的频率来驱动红外发射管和超声波发射器,并且用555来产生1Hz,占空比为50%的脉冲来控制红外发射电路和超声发射电路的开关。
其发射电路如图1所示:图1红外、超声发射电路4、三点定位法在无线传感器网络中,测得未知点与信标节点的距离,取其中3个距离即可用三边测量法算出它在坐标系中的坐标。
假设3个信标节点的坐标为A(x a,y a),B (x b,y b),C(x c,y c),如图2所示,未知节点O的坐标为O(x, y),该点到3个信标节点的距离分别为d a,d b,d c,那么,有以下公式[6]:(4-1)由(4-1)可以得到O点坐标为:图2三点定位示意图5、系统软硬件设计系统由待定位点,一个主节点,四个参考子节点和PC上位机构成。
其中待定位点包括红外、超声发射模块,子节点包括红外、超声接收模块,计时模块和Zig-Bee无线发射模块,主节点包括ZigBee接收模块和RS232接口电路。
5.1红外、超声发射模块。
红外、超声发射模块位于待定位点上,由ne555振荡电路发射,其中红外发射频率38KHz,超声波发射频率为40KHz,由频率为1Hz占空比为50%的脉冲来载波。
发射电路如图1。
5.2主芯片计时模块红外、超声接收传感器接收到信号后,将引脚信号输入到主控芯片计时。
主控芯片系统控制器芯片采用飞思卡尔公司hc9s12dg128,该芯片有4个增强型捕捉定时器,且可与CodeWarrior相连,具有下载程序、在线单步运行、断点调试、连续运行、修改寄存器和存储单元等特点。
定时器接收到红外下降沿信号记录定时起点,接收到之后的超声下降沿信号时记录定时终点,这两个时间差即为两种信号到达的时间差。
5.3ZigBee无线收发模块子节点主控芯片计算出红外,超声信号分别到达的时间差后,将此时间差数据发送至无线模块发送端口无线发送。
本系统的无线收发模块采用成都无线龙公司的C51RF-3ZigBee无线网络开发系统,是经济、高效、方便、快捷、可重复使用的开发工具套装,完全满足IEEE802.15.4标准和ZigBee技术标准的无线网络技术设计开发。
系统集成cc2430和51单片机,CC2430芯片的主要特点如下:图3子节点流程图14福建电脑2010年第9期《福建电脑》投稿须知《福建电脑》(国际标准刊号:ISSN 1673-2782;国内统一刊号CN 35-1115/TP )是福建省科技厅主管,福建省计算中心和福建省计算机学会主办的计算机学科综合月刊。
欢迎投稿:1.论文所涉及的项目如国家或地方基金课题,请在来稿中注明课题项目、编号、来源。
署作者真实姓名、工作单位、电话、通信地址、邮政编码和电子信箱。
2.来稿文责自负,如摘引他人作品,务请在参考文献中予以著录。
3.投稿前请作者自审一遍,所投稿件要求结构严谨,表达简明、语义确切、逻辑性强。
文稿一般不超过5千字(包括图、表、原程序、参考文献);图表和照片一般不超过4个(包括应用程序框图等)。
文章层次编序(二、三级标题)采用以下格式:0;1;2;…;1.1;1.2;1.2.1;…。
4.本刊只受理电子邮件投稿。
文档请用WORD 编排,并以附件形式发送。
同一篇稿件请不要反复传送。
5.编辑部收到作者稿件后,10个工作日内返馈初审意见(电子邮件)。
6.编辑部投稿信箱:fjdn@(1)高性能、低功耗的8051内核;(2)适应2.4GHzIEEE 802.15.4的RF 收发器;(3)极高的接收灵敏度和抗干扰性能;(4)强大的DMA 功能;系统采用频分多址(FDMA )技术分别给四个Zig -Bee 模块分频不同的频率,各ZigBee 发射节点以不同的频率在不同的时间发射,主节点根据接收频率接收分辨各节点的信息。
图4主节点流程图5.4上位机接口电路选用RS232电路,将主节点cc2430接收到的数据发送至PC 机计算。
5.5系统流程说明安装在待测节点上的红外、超声发射传感器同时发射出红外、超声信号。
4个参考子节点接收到红外下降沿信号时开始计时,接收到超声下降沿信号时计时结束,计算出此时间差,并将此数据发送到cc2430射频无线发送给主节点cc2430。
主节点工作以后,等待4个子节点发送的数据信息,接收到4个数据后,将此数据由RS232电路传输给上位PC 机并计算出待测点的坐标。
其工作流程如图3、图4所示:5.6定位效果图5定位效果图6、结束语本文研究设计了基于ZigBee 无线传感器网络的室内定位系统,该系统最终可以在2m*2m 范围内达到2cm 的测距精度和2cm 的定位精度。
通过加大红外、超声传感器的发射功率可以有效扩大该系统的定位范围,系统体积小,安装方便,工作状态良好且稳定,可以很好地满足室内定位的要求。
参考文献:[1]范平志,邓平,刘林.蜂窝无线定位.电子工业出版社,2002:1-3[2]李文峰.无线传感器网络与移动机器人控制.科学出版社,2009:55-57[3]马祖长,孙怡宁.无线传感器网络节点的定位算法,计算机工程2004:85-88[4]崔逊学,左从菊.无线传感器简明教程.清华大学出版社,2009:173-174[5]王东霞,贺金龙,窦文华.无线传感器网络研究综述。
计算机测量与控制.2004[6]刘海波,皱涛,翁哲.无线传感器网络定位技术应用。
中国新技术新产品.200915。