第十七章 拉格朗日方程
动力学中的拉格朗日方程
动力学中的拉格朗日方程在物理学和工程学中,拉格朗日方程是描述系统动力学的重要工具。
拉格朗日方程由法国数学家和物理学家约瑟夫·拉格朗日于18世纪提出,它能够将系统的动力学问题转化为一组方程,进而方便地求解系统的运动规律。
本文将介绍拉格朗日方程在动力学中的应用,以及其原理和推导方法。
一、拉格朗日方程的原理拉格朗日方程是从一种被称为“拉格朗日力学”的理论体系中得出的。
在拉格朗日力学中,系统的运动被描述为一种能量的变化过程。
拉格朗日方程的原理是基于系统的动能和势能的概念。
系统的动能可以用质点的质量和速度来表示,而势能则是系统中各个物体相对于某一参考点的位置所具有的能量。
根据能量守恒定律,系统的总能量在运动过程中保持不变。
拉格朗日方程的基本思想是,系统的动能和势能之间存在一种函数关系,称为拉格朗日函数。
通过对拉格朗日函数求取变量的极值,可以得到系统的运动方程。
这就是拉格朗日方程的原理。
二、拉格朗日方程的推导方法要推导拉格朗日方程,需要首先确定系统的拉格朗日函数。
拉格朗日函数可表示为系统的动能与势能之间的差异。
以单个质点为例,其拉格朗日函数可表示为L = T - V,其中T为动能,V为势能。
对于多个质点构成的系统,拉格朗日函数的表达式包含了各个质点的动能和相互作用势能。
然后,通过对拉格朗日函数对各个质点的运动变量求取变分,可以得到相应的运动方程,即拉格朗日方程。
三、拉格朗日方程的应用拉格朗日方程在经典力学和动力学中有广泛的应用。
它可以用于描述各种复杂力学系统的运动,如振动系统、弹性体、刚体等。
通过求解拉格朗日方程,可以精确地得到系统的运动规律,并且相较于牛顿力学的方法,具有更加简洁明了的形式。
在求解拉格朗日方程时,一种常见的方法是利用拉格朗日方程的守恒量。
当系统具有某些对称性时,拉格朗日方程会出现某些守恒量,如动量、角动量等。
这些守恒量能够更加简化运动方程的求解过程,并提供对系统运动性质的重要信息。
第十七章 拉格朗日方程

17.2
d T T Q ,得 由 ( ) dt 1 2 M (2Q 9 P)(r R) 6g
拉 6Mg 即 格 (2Q 9 P)(r R) 2 朗 积分得曲柄的运动方程为 日 3Mg 2 0t 0 t 方 2 (2Q 9 P)(r R) 程 0分别为初始转角和初始角速度。 式中, 0 、
1
O
g MA
A
1 mg g FB
则 yC R1 R 2 (1) 由动力学普遍方程得
g g MA 1 M B 2 (mg FBg )yC 0
17.1 将惯性力及(1)式代入上式,得 1 1 2 mR 1 1 mR 2 2 2 (mg ma ) R( 1 2 ) 0 2 动 2 整理得 力 (mgR maR 1 mR 2 ) (mgR maR 1 mR 2 ) 0 1 1 2 2
例1 图示滑轮系统中,动滑轮上悬挂着重为Q1 的重物,绳子绕过定滑轮后,挂着重为Q2的重物, 设滑轮和绳子的重量不计,求重为Q2的重物下降的 加速度。 g 解:以系统为研究对象,系统具 F2 Q 有理想约束,系统所受的主动力 1 a g g 2 s 2 g Q2 为 Q2 、 ,假想加上惯性力 F1 F2 、 。 F1 s 1 Q1 Q2 g g a 其中 F1 a1 F2 a2 1 g g Q1 给系统以虚位移s1和s2,由动力 学普遍方程,得 Q2 Q1 (Q2 a2 )s2 (Q1 a1 )s1 0 g g 1 1 由运动学关系 s1 s2 a1 a2 代入上式得 2 2
以上两式是由达朗伯原理和虚位移原理相结合 而得到的结果,称为动力学普遍方程,也称达朗 伯——拉格朗日方程。动力学普遍方程可以叙述如 下:在理想约束条件下,在任一瞬时作用在质点系 上所有的主动力和虚加的惯性力,在该瞬时质点系 所处位置的任何虚位移上的元功之和等于零。
拉格朗日方程

2、分析系统的运动,写出用广义坐标及广义速 度表示的系统的动能。(速度及角速度均为绝对的)
d L L ( ) 0 (k 1,2, , N ) k dt q qk
1.2
拉 T T d T 或 L L d L ( ) ( ) 格 q q j k dt q k dt q k q k q k k 朗 5、写出拉格朗日方程并加以整理,得到N个二 日 阶常微分方程。由2 N个初始条件,解得运动方程。 方 程
1.2
d T T Q ,得 由 ( ) dt 1 2 M (2Q 9 P)(r R) 6g
拉 6Mg 即 格 (2Q 9 P)(r R) 2 朗 积分得曲柄的运动方程为 日 3Mg 2 0t 0 t 方 2 (2Q 9 P)(r R) 程 0分别为初始转角和初始角速度。 式中, 0 、
1.2
拉 格 朗 日 方 程
例4 如图轮A的质量为 m1,在水平面上只滚动不 滑动,定滑轮B的质量为 m2,两轮均为均质圆盘,半 m3 径均为R,重物C的质量为 ,弹簧的弹性系数为 , k 试求系统的运动微分方程。 k AR 解:以系统为研究对象, B R 系统具有一个自由度。取 x x C 为广义坐标,x 从重物的平衡 位置量起。系统的动能为 2 1 1 2 1 1 3 x x 2 2 2 T ( m1 R )( ) ( m2 R )( ) m3 x 2 2 2R 2 2 R 2 1 2 (3m1 4m2 8m3 ) x 16 设系统平衡时弹簧的静伸长为 st ,则有关系式
整理后得 3 1 1 2 2 1 2 2 2 2 T m1 x m2 ( x L Lx cos ) m2 L 4 2 4 24
拉格朗日方程

17.2
板上有半径为 r 、 质量为m2的均质圆柱, 圆柱在板
上作纯滚动而不滑动,今有一水平常力F 拉动金属
板,试求圆柱纯滚的角加速度和金属板的加速度。
拉
解:以系统为研究对象,
格
系统具两个自由度。选取 x A、
为广 义坐标。
C m2 g
A
朗 日 方
系统的动能为
xA
m1g
T
1 2
m1xA2
1 2
(1 12
m2 L2
)2
整理后得
T
3 4
m1x2
1 2
m2 (x2
1 4
L22
Lxcos)
1 24
m2 L22
系统的广义力为 Qx 0
17.2
Q
W ( )
m2 g
L 2
cos (90
)
xm2 g
L sin
一、拉格朗日方程
设有n个知点组成的知点系,受完整的理想约束,
17.2 具有k个自由度,其位置可由k个广义坐标 q1, q2 ,, qk
来确定。则有
拉 格
d ( T ) T dt qj q j
Qj
( j 1,2,, k)
朗
日
式中
T
n i 1
12mi vi2 为质点系的动能;
M
r
O
拉 为R。今在曲柄上作用一不变的力
R
格
偶,其矩为M,使机构运动。求曲 柄的运动方程。
朗
解:以整个系统为研究对象,系统具有一个自
日 由度,取曲柄转角 为广义坐标。
拉格朗日运动方程
拉格朗日运动方程拉格朗日运动方程(Lagrange’s equations of motion)是经典力学中的一种重要工具,用于描述质点或者刚体在给定势能函数下的运动。
它由意大利数学家和物理学家约瑟夫·路易·拉格朗日(Joseph-Louis Lagrange)于18世纪提出,被广泛应用于各个领域的物理问题求解中。
1. 背景知识在介绍拉格朗日运动方程之前,我们需要先了解一些基础概念。
1.1 广义坐标和广义速度对于一个具有n个自由度的力学系统,我们可以引入n个广义坐标q1,q2,...,q n来描述系统的状态。
这些广义坐标可以是位置坐标、角度等。
同时,对于每个广义坐标q i,我们可以定义相应的广义速度q i。
1.2 势能函数和拉格朗日函数对于一个力学系统,在给定外力和内力作用下,我们可以定义一个势能函数V(q)来描述系统的势能。
势能函数通常与广义坐标有关。
而拉格朗日函数L(q, , t)则定义为系统的动能T(q, )减去势能函数V(q):L(q, , t) = T(q, ) - V(q)其中,T(q, )表示系统的动能,与广义坐标和广义速度有关。
1.3 原理和目标拉格朗日运动方程的目标是通过对拉格朗日函数进行变分,得到描述系统运动规律的微分方程。
这些微分方程被称为拉格朗日运动方程。
2. 拉格朗日运动方程的推导为了推导拉格朗日运动方程,我们首先需要引入一个重要概念——虚位移。
2.1 虚位移虚位移是指系统在某一时刻由于广义坐标的微小变化而发生的微小位移。
我们用δq i来表示第i个广义坐标的虚位移。
2.2 虚功原理根据虚功原理(D’Alembert’s principle),对于一个力学系统,在平衡状态下,任意时刻系统所受外力对于任意虚位移所做的功之和等于零。
用数学表达式表示为:∑F ini=1⋅δq i=0其中,F i表示第i个广义坐标对应的力。
2.3 拉格朗日方程的推导根据虚功原理,我们可以将每个力分解为广义坐标和广义速度的函数:F i=Q i(q1,q2,...,q n,q1,q2,...,q n,t)其中,Q i表示第i个广义坐标和广义速度对应的力。
动力学方程拉格朗日方程教学内容
mi
பைடு நூலகம்
ri q
ri
q
q
q
1
s
1
n i 1
mi
ri q
优r学ti课堂q
1 2
n i 1
mi
ri t
2
22
n
i1
n
i1
n
i1
mi
ri q
mi
ri q
mi
ri t
ri q
a
ri t
a
2 a
则
T
1 2
s
1
a
q
q
s
a q
可见广义力的径向分量就是的径向分量,说明 Qr 是一个力。
另外 x r sin , x r cos
优学课堂
10
Q
Fx
x
Fy
x
r(Fx sin Fy cos )
上式 括号中的第一项为 Fx
在 j 方向的投影,第二项 是 Fy在 j 方向的投影。
所以两者之和就是 F 在 j
y
Fy
视广义坐标的选择而定。 n 而广义力: Q i1
Fi
ri q
广义力可以是力,也可以是力矩等,视广义坐标的选择而
定。计算广义力的方法可以有两种:一种方法是从上定义式直
接计算,另一种方法是从主动优力学课所堂 作的虚功来计算。
6
1、从主动力所作的虚功来计算
W
n i 1
Fi
ri
s 1
s
1
d dt
T q
q
s
T
1 q
q
s
V
1 q
q
其中第一项中
第十七章拉格朗日方程

ri
n
Fi
i 1
( jk1qrij
q
j
kn
) (F
j1 i1
i
ri q j
)q
j
kn
[( X i
j1 i1
xi q j
Yi
yi q j
Z i
zi q j
)]q j
k
Q j q j
j 1
15
ri jk1qrij q j (i1,2, n)
(c)
代入质点系动力学普遍方程,得:
n
n
n
(Fi miai )ri Fi ri miairi 0 (d )
QA Ma QB QBe QBr QBe ma , QBr mar
10
From the general equation of dynamics we have
(QA QBe QBr cos )xA (QBe cos Q sin QBr )sB 0.
The system has two degree of freedom, we can choose xA and sB as independent virtual displacement. Moreover,
generalized coordinates.
Suppose there are n particles in the system and that there are s
constraints which all are ideal ones. The number of degrees of
ri q j
0
( j 1,2 , k) .
(f)
generalized inertial forces
拉格朗日方程推导

拉格朗日方程推导(实用版)目录1.介绍拉格朗日方程2.推导拉格朗日方程3.应用拉格朗日方程4.总结正文一、介绍拉格朗日方程拉格朗日方程是分析力学的重要方程之一,由法国数学家约瑟夫·拉格朗日于 18 世纪末提出。
拉格朗日方程的功能相当于牛顿力学中的牛顿第二定律,可以用来描述物体的运动规律。
与牛顿第二定律不同的是,拉格朗日方程采用了广义坐标和广义速度的概念,因此具有更广泛的适用性。
二、推导拉格朗日方程为了推导拉格朗日方程,我们需要先了解广义坐标和广义速度的概念。
1.广义坐标:在经典力学中,我们通常使用笛卡尔坐标系来描述物体的位置,但在某些情况下,使用笛卡尔坐标系并不方便。
为了解决这个问题,我们引入了广义坐标的概念。
广义坐标是一个包含物体所有自由度的坐标系,其中每个自由度对应一个坐标。
2.广义速度:广义速度是物体在广义坐标系中的速度,可以表示为广义坐标的导数。
有了广义坐标和广义速度的概念,我们可以开始推导拉格朗日方程。
拉格朗日方程的推导过程较为复杂,涉及到拉格朗日量的概念。
拉格朗日量是描述物体运动状态的函数,包含物体的动能和势能。
通过对拉格朗日量求导,我们可以得到拉格朗日方程。
三、应用拉格朗日方程拉格朗日方程在物理学中有广泛的应用,下面举一个简单的例子来说明如何应用拉格朗日方程。
假设有一个质点沿着 x 轴运动,受到一个沿 x 轴的力 F 作用。
我们可以用拉格朗日方程来描述这个问题。
首先,我们需要确定物体的广义坐标和广义速度。
在这个问题中,广义坐标为 x,广义速度为 dx/dt。
然后,我们需要确定拉格朗日量,即动能和势能之和。
由于物体沿 x 轴运动,势能为 0,动能为 1/2mv^2。
因此,拉格朗日量为 1/2mv^2。
接下来,我们对拉格朗日量求导,并令其等于力 F。
通过求解这个方程,我们可以得到物体的运动规律。
四、总结拉格朗日方程是分析力学中的一个重要方程,可以用来描述物体的运动规律。
通过引入广义坐标和广义速度的概念,拉格朗日方程具有更广泛的适用性。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
二、保守系统的拉格朗日方程 在上述条件下,如果质点系所受的主动力都是 17.2 有势力,就得到保守系统的拉格朗日方程
( j 1,2, , k ) 拉 格 朗 式中 L T V 为质点系动能和势能之差,称为拉格 日 朗日函数。 这就是保守系统的拉格朗日方程。 三、应用拉格朗日方程解题的步骤 方 1、确定研究对象,(一般以整个系统)判断系 程
第十七章 拉格朗日方程
• • 动力学普遍方程 拉格朗日方程
引
言
本章是将达朗伯原理和虚位移原理结合起来 推导出动力学普遍方程和拉格朗日方程。动力学 普遍方程中系统的运动是直角坐标来描述的,而 拉格朗日方程是用广义坐标来描述系统的运动, 两者都是用来解决非自由质点系的动力学问题, 它是用分析的方法解决动力学问题的出发点,因 此它是分析力学的基础。对于解决复杂的非自由 质点系的动力学问题,应用拉格朗日方程往往要 比用动力学普遍方程简便得多。
17.1
2(2Q2 Q1 ) 动 s2 0 a2 4Q Q g 2 1 力 例2 有两个半径皆为r的轮子,中心用连杆相连, 学 在倾角为 的斜面上作纯滚动,如图。设轮重皆为P, 普 对轮心的转动惯量皆为J,连杆重量为Q,求连杆运 M g g 遍 动的加速度。 P g 解:以系统为研究对象, 方 Q a g M P g 系统具有理想约束,系统所受 P 程 Q
例1 图示滑轮系统中,动滑轮上悬挂着重为Q1 的重物,绳子绕过定滑轮后,挂着重为Q2的重物, 设滑轮和绳子的重量不计,求重为Q2的重物下降的 加速度。 g 解:以系统为研究对象,系统具 F2 Q 有理想约束,系统所受的主动力 1 a g g 2 s 2 g Q2 为 Q2 、 ,假想加上惯性力 F1 F2 、 。 F1 s 1 Q1 Q2 g g a 其中 F1 a1 F2 a2 1 g g Q1 给系统以虚位移s1和s2,由动力 学普遍方程,得 Q2 Q1 (Q2 a2 )s2 (Q1 a1 )s1 0 g g 1 1 由运动学关系 s1 s2 a1 a2 代入上式得 2 2
k st R m3 g 2R 即 k st 2m3 g
17.2
拉 格 朗 日 方 代入保守系统的拉格朗日方程 d ( L ) L 0 得 dt x x 程
2kx 0 (3m1 4m2 8m3 ) x
即为系统的运动微分方程。
以系统平衡位置为弹力及重物C的零势能位置, 则系统的势能为 k AR B R k x 2 2 V m3 gx ( st ) st 2 2 x C 1 2 利用前面的关系,整理得 V kx 8 则拉格朗日函数为 1 1 2 2 kx L T V (3m1 4m2 8m3 ) x 16 8
17.1
动 力 学 普 n g 遍 ( Fi N i Fi ) ri 0 i 1 方 设该质点受的是理想约束,则有 程 Ni ri 0 n g 故 ( Fi Fi ) ri 0
i 1
设由n个质点组成的质点系,由达朗伯原理知, 在质点系运动的任一瞬时,任一质点 i g M 上作用的主 动力 Fi ,约束反力 Ni 及其惯性力 Fi mi ai 三者构 成形式上的平衡力系,即 g Fi Ni Fi 0 (i 1,2, , n) 对该质点系应用虚位移原理,为此,取质点系 的任何一组虚位移 ri (i 1,2, , n) ,则得
A
M
O
r
R
朗 解:以整个系统为研究对象,系统具有一个自 日 由度,取曲柄转角 为广义坐标。 方 由运动学关系知,动齿轮的角速度 与曲柄的角 程 速度 的关系为 rR r
则系统的动能为
17.2
拉 格 朗 日 方 程
1 1 Q 1P 1 1P 2 2 2 2 2 2 ( T (r R) (r R) r ) 2 3 g 2g 2 2g 1 2 (2Q 9 P)(r R) 2 12g A r M 给曲柄以虚位移 ,则对应的 O 广义力为 W M R Q M 求诸导数 T 1 (2Q 9 P)(r R) 2 6g d T 1 ( ) (2Q 9 P)(r R) 2 dt 6g T 0
B
2
4 a g 5ຫໍສະໝຸດ C mgg MB a
2
一、拉格朗日方程 设有n个知点组成的知点系,受完整的理想约束, 17.2 具有k个自由度,其位置可由k个广义坐标 q1 , q2 , , qk 来确定。则有
d T T 拉 ( ) Q j ( j 1,2, , k ) j 格 dt q q j n 朗 1 2 j 是广义坐标对 式中 T mi vi 为质点系的动能; q 日 i 1 2 方 时间的变化率,称为广义速度; Q j是对应广义坐标 程 q j 的广义力。 这就是拉格朗日方程,简称拉氏方程。它是由k个二
2 2 学 2 相互独立,要 由于虚位移 1、 普 使上式成立,则有 O 遍 g a 1 R 0 ( 2 ) 1 2 M 方 g a 1 2 R 2 0 (3) 程 由运动学关系,有
g A
1
A
mg 1 g FB
C
a R1 R 2 (4) 联立求解(2)(3)(4)式,得
1
O
g MA
A
1 mg g FB
则 yC R1 R 2 (1) 由动力学普遍方程得
g g MA 1 M B 2 (mg FBg )yC 0
17.1 将惯性力及(1)式代入上式,得 1 1 2 mR 1 1 mR 2 2 2 (mg ma ) R( 1 2 ) 0 2 动 2 整理得 力 (mgR maR 1 mR 2 ) (mgR maR 1 mR 2 ) 0 1 1 2 2
的主动力有它们的重力。假想 加上惯性力,如图。
a P g 其中 P a M J g r
g
1 a2 1 (Q2 2 Q1 ) g (Q2 4 Q1 )s2 0
P
Q Q a g
g
给连杆以平行斜面移动的虚位移 s ,则轮子有 s 相应的转动虚位移 ,根据动力学普遍方程 17.1 r
动 力 学 普 遍 方 程
(2P g Q g )s 2M g (2P Q) sin s 0 a J 即 (2 P Q)s 2 2 as (2 P Q) sin s 0 g r M g g s 0 P g 2 Q a g M (2P Q)r sin P g P a g 2 Q (2P Q)r 2 Jg
T d T 或 L L 拉 T d L ( ) ( ) 格 q j q j dt q j j dt q q j q j 朗 5、写出拉格朗日方程并加以整理,得到k个二 日 阶常微分方程。由2 k个初始条件,解得运动方程。 方 程
例4 在水平面内运动的行星齿 轮机构如图。已知动齿轮半径为r, 17.2 重为P,可视为均质圆盘;曲柄OA 重Q,可视为均质杆;定齿轮半径 拉 为R。今在曲柄上作用一不变的力 偶,其矩为M,使机构运动。求曲 格 柄的运动方程。
17.2
拉 格 朗 日 方 程
例6 如图,均质圆轮的质量为m1,半径为R,在 水平面上只滚动不滑动。杆长L质量为 m2与轮在圆心 A铰接,试求系统的运动微分方程。 x 解:以系统为研究对象, R 系统具有两个自由度。取 x L x A 和 为广义坐标。 2 系统的动能为 C 1 3 x x 2 2 T ( m1 R )( ) 2 2 R 1 1 1 2 L2 2 L 2 x cos ( m2 L2 ) 2 m2 x 2 4 2 2 12 整理后得 3 1 1 2 2 1 2 2 2 2 T m1 x m2 ( x L Lx cos ) m2 L 4 2 4 24
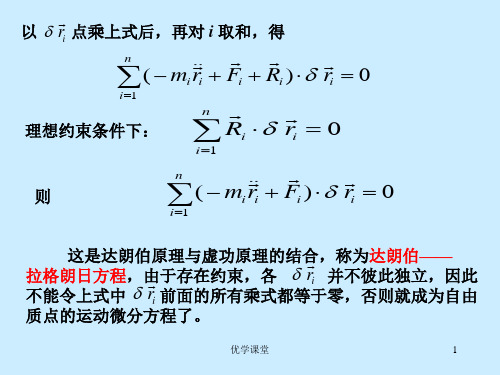
以上两式是由达朗伯原理和虚位移原理相结合 而得到的结果,称为动力学普遍方程,也称达朗 伯——拉格朗日方程。动力学普遍方程可以叙述如 下:在理想约束条件下,在任一瞬时作用在质点系 上所有的主动力和虚加的惯性力,在该瞬时质点系 所处位置的任何虚位移上的元功之和等于零。
17.1
动 力 学 普 遍 方 程
例3 均质圆柱体A和B质量均为 m ,半径均为R。圆柱A可绕固定 轴O转动。一绳绕在圆柱A上,绳的 另一端绕在圆柱B上。求B下落时, 质心C点的加速度。摩擦不计。 解:以系统为研究对象,系统所 受的主动力有圆柱的重力。设两轮的 角加速度为 1 、 2 ,轮B质心的加速 度为 a 。假想加上惯性力,如图。
17.1
即
( Fi mi ai ) ri 0
n i 1
动 力 学 普 遍 方 程
将上式写成解析式,则有
( X
i 1
n
i
i ) xi (Yi mi i ) yi ( Z i mi i ) zi 0 mi x y z
s
P
17.1
动 B 力 2 C 学 mg y M a 普 遍 1 1 g g 方 其中 M A mR 21 FBg ma M B mR 2 2 2 2 程 此系统具有两个自由度,取轮A、轮B的转 1 角 2、 为广义坐标。给系统一组虚位移,如图。
C
g B
2
统的自由度数目,选取合适的广义坐标。
2、分析系统的运动,写出用广义坐标及广义速 度表示的系统的动能。(速度及角速度均为绝对的)
d L L ( ) 0 j q j dt q