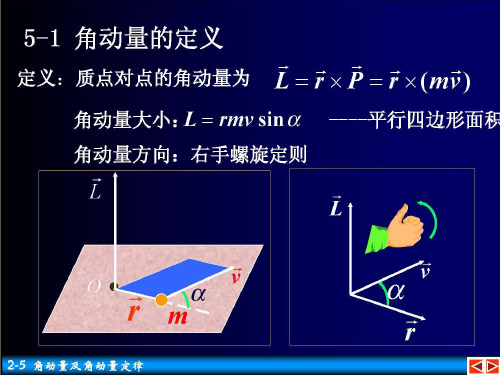
拉格朗日方程漫谈(第二讲)
合集下载
2_拉格朗日方程
O
(x1,y1)
A
P1
(x2,y2) B(x3,y3)
P2
F
(1)
由已知条件可得
x1
1 2
l1 sin 1 l 2 sin (2)
x 2 l1 sin
2 y 3 l1 cos l 2 cos
把(2) 式代入(1) 式得
P1 (
1 2
l1 sin ) P2 ( l1 sin
x i x i ( q1 , q 2 , , q s , t ) y i y i ( q1 , q 2 , , q s , t ) z i z i ( q1 , q 2 , , q s , t )
或 式中
( i 1, 2 , , n , s 3 n )
ri ri ( q 1 , q 2 , , q s , t )
以上分量式若改用s 个独立广义坐标表示,然后令s 个独立的 虚位移前的乘数等于零,则可得出所求的平衡条件。 若求约束力,则要利用拉格朗日未定乘数。 广义坐标下 ri 的虚位移为
ri
n
s
ri
由此得广义坐标下的平衡方程是
W
Q
1
q
q 0
s
F
i 1 s
n
i n
i 1
虚功原理:受理想约束的力学体系平衡的充要条件是此力学 体系的诸主动力在任意虚位移中所做的元功之和为零。这就 是虚功原理,也叫虚位移原理。是1717年伯努利首先发现。 对于理想约束体系,利用虚功原理可以方便的求出主动力满 足的平衡条件,但无法求出约束反力。 由于约束,3n 个坐标不独立,即作用在任一质点上的合外 力在虚位移方向上的投影,一般不会全令之为零。否则就可 能变成n 个自由质点的平衡方程。
拉格朗日第二类方程

拉格朗日第二类方程
拉格朗日第二类方程是经典力学中的基础概念之一。
它描述的是质点
在一定约束下的运动,是建立在尺度不变性原理的基础上的。
下面我
将按照以下列表分别介绍拉格朗日第二类方程的定义、推导过程以及
其应用。
1. 定义:
拉格朗日第二类方程是描述系统动力学的数学模型,它是由勒让德在1797年建立的,具体形式为:
d/dt (∂L/∂qᵢ) − ∂L/∂qᵢ = Qᵢ
其中,L是系统的拉格朗日函数,q是系统的广义坐标,Q是系统的非
保守力。
2. 推导过程:
拉格朗日第二类方程的推导主要分为以下几个步骤:
第一步,构建系统的拉格朗日函数,即L=T-V,其中T是系统的动能,V是系统的势能。
第二步,求出系统的广义动量pᵢ=∂L/∂qᵢ。
第三步,对广义动量求导得到系统的加速度aᵢ= d/dt (∂L/∂qᵢ)。
第四步,根据牛顿第二定律F=ma以及广义动量的定义pᵢ=∂L/∂qᵢ,将非保守力Q用广义动量表示为Qᵢ=∂V/∂qᵢ。
第五步,代入广义动量和非保守力的表达式,得到拉格朗日第二类方程d/dt (∂L/∂qᵢ) − ∂L/∂qᵢ = Qᵢ。
3. 应用:
拉格朗日第二类方程是经典力学中最基础的方程之一,它在物理学的各个领域都有广泛的应用,如
(1)陀螺的运动学研究
(2)杆的运动学研究
(3)学习简谐振动的方程
(4)学习经典电动力学中的运动方程
(5)学习光学中的光路方程等
总之,拉格朗日第二类方程在物理学研究中有着重要的地位,熟练掌握它的概念和应用对于探究自然界的规律和解决实际问题都具有重要作用。
拉格朗日方程2

n
∂r & m&i ⋅ i ∑ ir ∂q i= 1 k
n n ∂r d d ∂r & ⋅ i ) −∑ ir ⋅ ( i ) & = ∑ i (r m mi i dt ∂qk dt ∂qk i= 1 i= 1 n
∂r N ∂r & & r = i +∑ i qk i ∂t k=1 ∂qk
& qk =
x
解:2、施加惯性力
y A δx OC a1
FI 2 r
MI2
δϕ D C2 α
m2 g FI 2 e
F = ma I1 1 1
F =m a I2e 2 1
ae C1
FI1
F = m ar I2r 2
MI2 = J2 α2 1 J2 = m R2 2 2
ar B
x
m1g
解:3、确定虚位移 考察三棱柱和圆盘组成的 系统,系统具有两个自由度。 系统,系统具有两个自由度。 二自由度系统具有两组虚 位移: 位移: 第一组
q = (q1 ,q2 ,⋅⋅⋅,qN )
ri =ri (q , q2,⋅⋅⋅, qN ,t) 1
∑F ⋅δ r −∑ma ⋅δ r =0
i= 1 i i i= 1 i i i N k k
n
n
∑F ⋅δ r = ∑Q δq
1 i= i i 1 k=
n
Qk——广义力
N n ∂r ∂r i & & mr ( mr mai ⋅δ ri = ∑ i&i ⋅ ∑ δqk = ∑ ∑ i&i ⋅ i )δqk ∑i ∂qk i= 1 k= ∂ k 1 q k= i= 1 1 i= 1
y A δx OC
∂r & m&i ⋅ i ∑ ir ∂q i= 1 k
n n ∂r d d ∂r & ⋅ i ) −∑ ir ⋅ ( i ) & = ∑ i (r m mi i dt ∂qk dt ∂qk i= 1 i= 1 n
∂r N ∂r & & r = i +∑ i qk i ∂t k=1 ∂qk
& qk =
x
解:2、施加惯性力
y A δx OC a1
FI 2 r
MI2
δϕ D C2 α
m2 g FI 2 e
F = ma I1 1 1
F =m a I2e 2 1
ae C1
FI1
F = m ar I2r 2
MI2 = J2 α2 1 J2 = m R2 2 2
ar B
x
m1g
解:3、确定虚位移 考察三棱柱和圆盘组成的 系统,系统具有两个自由度。 系统,系统具有两个自由度。 二自由度系统具有两组虚 位移: 位移: 第一组
q = (q1 ,q2 ,⋅⋅⋅,qN )
ri =ri (q , q2,⋅⋅⋅, qN ,t) 1
∑F ⋅δ r −∑ma ⋅δ r =0
i= 1 i i i= 1 i i i N k k
n
n
∑F ⋅δ r = ∑Q δq
1 i= i i 1 k=
n
Qk——广义力
N n ∂r ∂r i & & mr ( mr mai ⋅δ ri = ∑ i&i ⋅ ∑ δqk = ∑ ∑ i&i ⋅ i )δqk ∑i ∂qk i= 1 k= ∂ k 1 q k= i= 1 1 i= 1
y A δx OC
简称拉格朗日方程

本章研究拉格朗日第二类方程(简称拉格朗日方程)。他是研究动力学问 题的又一有力手段,在解决非自由质点系的动力学问题时,显得十分简捷、规 范。
§17-1 广义力 以广义力表示的质点系的平衡条件
一、广义力 设有n个质点组成的质点系,具有k个自由度,可由k个广义坐标q1, q2,... ,
qk 确定其位置。在非定常约束下,质点系中任一质点Mi的矢径
一、拉格郎日方程
设有n个质点组成的质点系,具有k个自由度,可由k个广义坐标q1, q2,... , qk 确定其位置。在非定常约束下,质点系中任一质点Mi的矢径
Mi的虚位移(固定时间t):
代入质点系动力学普遍方程:
第一项:主动力在质点系的虚位移的元功之和:
n
k
Fi ri Qj q j
i 1
i
yi q j
j zi k ) q j
2、实际应用时,由
k
W Qjq j Q1q1 Q2q2 ... Qkqk j 1
由于各广义坐标彼此独立,所以在求某个广义力Qj时,仅使对应的广义坐 标qj变分 qj,而其余的广义坐标则保持不变。即:令 qj≠0, qi=0(i=1,2, ...n,i ≠ j),
d dt
(mi
vi
ri q j
)
mi
vi
d ri dt q j
为简化上式 , 需要用到以下两个关系式:
(f)
①Mi点的速度: 由(a)式
vi
dri dt
ri q1
q1
ri q2
q2 ...
ri qk
qk
ri t
k
ri
j1 q j
qj
ri t
(g)
式中:qj — 广义速度
§17-1 广义力 以广义力表示的质点系的平衡条件
一、广义力 设有n个质点组成的质点系,具有k个自由度,可由k个广义坐标q1, q2,... ,
qk 确定其位置。在非定常约束下,质点系中任一质点Mi的矢径
一、拉格郎日方程
设有n个质点组成的质点系,具有k个自由度,可由k个广义坐标q1, q2,... , qk 确定其位置。在非定常约束下,质点系中任一质点Mi的矢径
Mi的虚位移(固定时间t):
代入质点系动力学普遍方程:
第一项:主动力在质点系的虚位移的元功之和:
n
k
Fi ri Qj q j
i 1
i
yi q j
j zi k ) q j
2、实际应用时,由
k
W Qjq j Q1q1 Q2q2 ... Qkqk j 1
由于各广义坐标彼此独立,所以在求某个广义力Qj时,仅使对应的广义坐 标qj变分 qj,而其余的广义坐标则保持不变。即:令 qj≠0, qi=0(i=1,2, ...n,i ≠ j),
d dt
(mi
vi
ri q j
)
mi
vi
d ri dt q j
为简化上式 , 需要用到以下两个关系式:
(f)
①Mi点的速度: 由(a)式
vi
dri dt
ri q1
q1
ri q2
q2 ...
ri qk
qk
ri t
k
ri
j1 q j
qj
ri t
(g)
式中:qj — 广义速度
理论力学(Ⅱ)—拉格朗日方程59页PPT

46、我们若已接受最坏的,就再没有什么损失。——卡耐基 47、书到用时方恨少、事非经过不知难。——陆游 48、书籍把我们引入最美好的社会,使我们认识各个时代的伟大智者。——史美尔斯 49、熟读唐诗三百首,不会作诗也会吟。——孙洙 50、谁和我一样用功,谁就会和我一样成功。——莫扎特
理论力学(Ⅱ)—拉格朗日方程
11、用道德的示范来造就一个人,显然比用法律来约束他更有价值。—— 希腊
12、法律是无私的,对谁都一视同仁。在每件事上了好的自由,因为好人不会去做法律不允许的事 情。——弗劳德
14、法律是为了保护无辜而制定的。——爱略特 15、像房子一样,法律和法律都是相互依存的。——伯克
第2章 拉格朗日方程
在数论方面,拉格朗日也显示出非凡的才能。他对费马提出的许多问题作出了解答。如,一个正整数是不多于4个平方数的和的问 题等等,他还证明了圆周率的无理性。这些研究成果丰富了数论的内容。 在《解析函数论》以及他早在1772年的一篇论文中,在为微积分奠定理论基础方面作了独特的尝试,他企图把微分运算归结为代数运 算,从而抛弃自牛顿以来一直令人困惑的无穷小量,并想由此出发建立全部分析学。但是由于他没有考虑到无穷级数的收敛性问题, 他自以为摆脱了极限概念,其实只是回避了极限概念,并没有能达到他想使微积分代数化、严密化的目的。不过,他用幂级数表示函 数的处理方法对分析学的发展产生了影响,成为实变函数论的起点。
2. 具有简单统一的微分方程;
力学体系不同
分析力学:力学量 L(T,V) 或 H(T,V) 不同. 牛顿力学:运动微分方程不同.
3. 使用范围更广
能量概念适用于量子力学,甚至非力学体系;
..
量子力学中的 r, , r, 等是没有意义的.
4. 扩大了坐标的概念、引入广义坐标
n 个质点,k 个约束
牛顿力学:3n k 个方程;
分析力学
分析力学主要内容:
约束与广义坐标 虚功原理 拉格朗日方程 小振动 哈密顿正则方程 泊松括号与泊松定理 哈密顿原理 正则变换 哈密顿—雅科比理论
导论
一. 研究机械运动的着眼点
牛 顿 力 学 ( 矢 量 力 学)力动量F 2pm2V(Tr)动势能能分 析 力 学
二. 分析力学的特点
1. 把力学系统作为一个整体考虑 (牛顿力学是先质 点、再质点系 );
如果约束方程不仅包含质点的坐标, 还包含坐标对 时间的导数或坐标的微分, 而且不能通过积分使之 转化为仅包含坐标和时间的完整约束方程, 则这种 约束称为非完整约束, 其约束方程形式为
2. 具有简单统一的微分方程;
力学体系不同
分析力学:力学量 L(T,V) 或 H(T,V) 不同. 牛顿力学:运动微分方程不同.
3. 使用范围更广
能量概念适用于量子力学,甚至非力学体系;
..
量子力学中的 r, , r, 等是没有意义的.
4. 扩大了坐标的概念、引入广义坐标
n 个质点,k 个约束
牛顿力学:3n k 个方程;
分析力学
分析力学主要内容:
约束与广义坐标 虚功原理 拉格朗日方程 小振动 哈密顿正则方程 泊松括号与泊松定理 哈密顿原理 正则变换 哈密顿—雅科比理论
导论
一. 研究机械运动的着眼点
牛 顿 力 学 ( 矢 量 力 学)力动量F 2pm2V(Tr)动势能能分 析 力 学
二. 分析力学的特点
1. 把力学系统作为一个整体考虑 (牛顿力学是先质 点、再质点系 );
如果约束方程不仅包含质点的坐标, 还包含坐标对 时间的导数或坐标的微分, 而且不能通过积分使之 转化为仅包含坐标和时间的完整约束方程, 则这种 约束称为非完整约束, 其约束方程形式为
06-分析力学基础-第二类拉格朗日方程资料

保守体系的拉格朗日方程为:
d dt
(qLk)qLk
0
想一想:上式的成立、适用条件是什么?
M1-6
3. 对拉格朗日方程的评价
(1) 拉氏方程的特点(优点): 是一个二阶微分方程组,方程个数与体系的自由度相同。形式简 洁、结构紧凑。而且无论选取什么参数作广义坐标,方程形式不变。 方程中不出现约束反力,因而在建立体系的方程时,只需分析已 知的主动力,不必考虑未知的约束反力。体系越复杂,约束条件越 多,自由度越少,方程个数也越少,问题也就越简单。
M1-10
系统动能:
T1 2m 1x21 2JBB 21 2JI
2 A
1 2 m 1 x 2 1 2 1 2 m 2 R 2B 2 1 2 2 3 m 2 R 2A 2
m1
2m2 2
x2
系统的拉格朗日函数(动势)
LTV m 1 2 2 m 2x 2 1 2 k (0 x )2 m 1 g x
5. 求出上述一组微分方程的积分。
M1-9
[例] 物块C的质量为m1,A,B两轮 皆为均质圆轮,半径R,质量为m2, 求系统的运动微分方程。
解:图示机构只有一个自由度,所受
约束皆为完整、理想、定常的,以物 块平衡位置为原点,取x 为广义坐标。
系统势能: (以弹簧原长为弹性势能零点)
V1 2k(0x)2m1gx
2. 计算质点系的动能T,表示为广义速度和广义坐标的函数。
3. 计算广义力 Q j(j 1 ,2 , ,k),计算公式为:
Q j i n1(Xi q xijYi q yijZi q zij) 或
Qj
W ( j) qj
若主动力为有势力,也可将势能 V 表示为广义坐标的函数。
分析力学基础-第二类拉格朗日方程

i n1mid dtr& iq & r& iki n1mir& iqr& ik
d d ti n1 m ir & i q & r & ik qki n11 2m ir & ir & i
d d t q & ki n11 2m ivi2 qki n11 2m ivi2
d dt
qT&k
Qj
W ( j) qj
若主动力为有势力,也可将势能 V 表示为广义坐标的函数。
4. 建立拉氏方程并加以整理,得出k个二阶常微分方程。
5. 求出上述一组微分方程的积分。
.
M1-9
[例] 物块C的质量为m1,A,B两轮 皆为均质圆轮,半径R,质量为m2, 求系统的运动微分方程。
解:图示机构只有一个自由度,所受
约束皆为完整、理想、定常的,以物 块平衡位置为原点,取x 为广义坐标。
系统势能: (以弹簧原长为弹性势能零点)
V1 2k(0x)2m1gx
.
M1-10
系统动能:
T1 2m 1x & 21 2JBB 21 2JI
2 A
1 2 m 1 x & 2 1 2 1 2 m 2 R 2B 2 1 2 2 3 m 2 R 2A 2
应用拉氏方程解题的步骤:
1. 判定质点系的自由度k,选取适宜的广义坐标。必须注意: 不能遗漏独立的坐标,也不能有多余的(不独立)坐标。
2. 计算质点系的动能T,表示为广义速度和广义坐标的函数。
3. 计算广义力 Q j(j1,2,L,k),计算公式为:
Q j i n1(Xi q xijYi q yijZi q zij) 或
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
1 2 1 2 L lv gu 2 2 u
gu
dv l gu 0 dt d 2u l 2 gu 0 dt
沿着一个弯曲 的面滑动
小结
最小作用量原理;这个世界有个最基本的原则。“能量” 偷懒原则。机械能守恒、动量取极小值。
哈密顿原理:定义了作用量能量泛函,动能-势能 拉格朗日方程也是一个原理;也可以从哈密顿原理来。
L q, q, t 的时间积分以真实运动路线上的值为驻值。
Ldt 0;
t1
t2
t2
Ldt 0
t1
t2
T V dt 0;
t1
在各种能量泛函的取值中,取驻值的那个是真实的。 最小作用量原理: 能量守恒 L V dt 0; 的情况下,动能的全变分为零;
几个理论力学的例子,挺方便的,但不是我们的目标。
拉格朗日方程漫谈
第二讲
1、怎样理解最小作用量原理? 2、哈密顿原理; 3、拉格朗日方程的推导 4、几个理论力学的例子
中国科学院力学研究所 研究员 中国科学院大学 岗位教授
李世海 博士
最小作用量原理:
最小作用量原理(principle of least action)是物理学中描述客 观事物规律的一种方法。 从功能角度去考察和比较客体一切可能的运动(经历),认为客体的 实际运动(经历)可以由作用量求极值得出,是其中作用量最小的那 个。 自然界总是通过最短的途径发生作用的。 最小作用量原理还可详述为:对于定常保守系统,在广义坐标
t2
ab ab ab
t2
Ldt
t1
t
d L d L L u u u dt 0 dt v u dt v t1
在两个时 间端点上 q 为零
2 2 L d L L u u u dt 0 v dt v u t1 t1
qi和时间t的联合空间(q1,q2,…,qN;t)里,对于机械能E保持不
变(即δE=0)的各条路径中,如果路径的端点(包括始点和终 点)的全变分为零,则积分
Tdt 0
t1 t2
对于真实运动的路径和邻
近的旁路比较,真实路径的积分是驻值。
机械能最小 动能最小
哈密顿原理
在N+1维空间 ( q1 , q2 ....., qN 1 , t ) 中,任两点之间连线上动势
对速度变分: 动量; 对时间求导 得到惯性项。
1 2 1 2 L mv ku 2 2
dv m ku 0 dt d 2u m 2 ku 0 dt
泛函对位移的变分:力
ku
拉格朗日方程举例:自由落体
L T V
d L L 0 dt v u
u
h
1 2 L mv mg (h u ) 2
d mv mg 0 dt dv m mg dt
hu
mg
质量乘加速度
这是一个从高度h的质量块,在重力作用下运动的方程。
拉格朗日方程举例:一条绳子沿着桌边下落
L T V
d L L 0 dt v u
t
t2
d L L dt v u udt 0 t1
t2
dt 0 dt v u
t1
d L L
d L L 0 dt v u
认识拉格朗日方程
t2 t1
哈密顿原理:是动能与势能的差的全变分为零;
拉格朗日方程:表达的更具体些。
从哈密顿原理可以得到拉格朗日方程
L L u , v, t
Ldt Ldt 0t1 t1ຫໍສະໝຸດ t2t2L
dq d L L q q v u 因为: q dt dt v u L L d d L d L v u u u v v dt dt v dt v
从基本原理得到的方程
泛函对两个函数变分
L L u , v, t
泛函:
d L L 0 dt v u
力:能量相对 位移的变化 动量:能量相 对速度的变化
L T V
对动量求时 间的导数
拉格朗日方程举例:弹簧振子
泛函的构成
L T V
d L L 0 dt v u