制造装备课后答案复习进程
制造装备课后答案

26、某车床的主轴转速n=40~1800r/min ,公比41.1=ϕ电动机的转速min /1440=电n ,试拟定结构式,转速图;确定齿轮的齿数、带轮的直径;演算转速误差;画出主传动系统图。
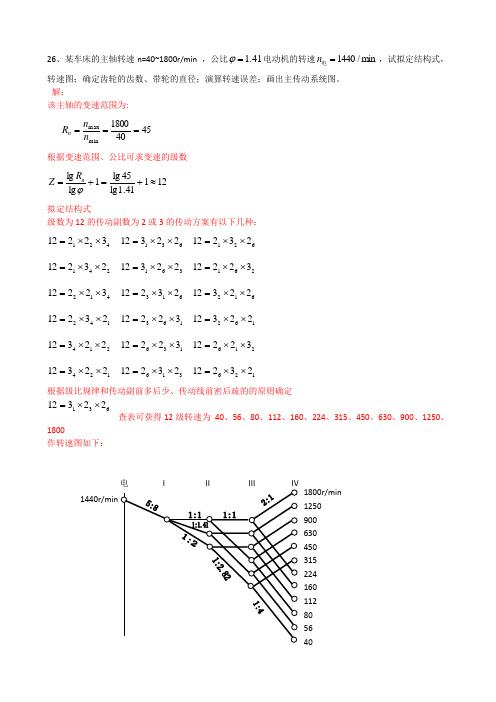
解:该主轴的变速范围为:根据变速范围、公比可求变速的级数 拟定结构式级数为12的传动副数为2或3的传动方案有以下几种:根据级比规律和传动副前多后少、传动线前密后疏的的原则确定查表可获得12级转速为 40、56、80、112、160、224、315、450、630、900、1250、1800作转速图如下:41.12max ==ϕ主u .14min ==-ϕ主u 125mm 则大带轮直径2=d =-⨯)015.01(197mm 齿轮齿数的确定: 1:2 查表可得....=zS取72=z S 可以确定 三个传动副的齿数为1:1传动副 36 361:1.41传动副 30 42 1:2传动副 24 48 同理可确定II III 轴的齿数和取 84 1:1传动副齿数取 42 42 1:2.82传动副齿数取22 62 III IV 之间的传动副齿数和取 90 2:1的传动副齿数取 60 30 1:4的传动副齿数取 18 72 转速误差的计算 1 2 3 4 5 12 理论转速 40 56 80 112 160 1800 实际转速 39.32 56.17 78.64 110.81 158.30 221.63 314.56 449.38 629.13 886.5 1266.43 1773 转速误差率(%)1.70 0.31 1.70 1.06 1.06 1.06 0.14 0.14 0.141.51.31 1.563122312⨯⨯=1800r/min 40 56 80 112 160 224 315 450 630 900 1250 电 I IIIII IV40 56 80 112 160 224 315 450 63090012501800r/min1440r/min电I II III IV根据上表可知转速误差率在允许的范围内 绘制传动系统图如下:27min ,试设计该机床==-1Z n R φ查表可获得拟定81max =ϕ主u 3min =-ϕ主u 221.625mm 查表可得....84726048....,,,,,=z S取48=z S 可以确定 两个传动副的齿数为1:1传动副 24 241:1.41传动副 20 28同理可确定II III 轴的齿数和取 60 1:1传动副齿数取 30 30 1:2传动副齿数取20 40III IV 之间的传动副齿数和取 72 1.41:1的传动副齿数取 42 30 1:2.82的传动副齿数取 19 53 转速误差的计算主轴各级转速所获得的实际转速按下面的公式计算 1 2 3 4 5 6 7 8 理论转速 100 140 200 280 400 560 800 1120 实际转速 100.98 141.25 201.78 282.49 394 551.6 788 1103.2 转速误差率(%)0.89 0.89 0.89 0.89 1.5 1.5 1.5 1.5根据上表可知转速误差率在允许的范围内 绘制传动系统图如下:28试从26.1=ϕ动系统图。
制造装备课后答案
26、某车床的主轴转速n=40~1800r/min ,公比41.1=ϕ电动机的转速min /1440=电n ,试拟定结构式,转速图;确定齿轮的齿数、带轮的直径;演算转速误差;画出主传动系统图。
解:该主轴的变速范围为: 45401800min max ===n n R n 根据变速范围、公比可求变速的级数12141.1lg 45lg 1lg lg ≈+=+=ϕn R Z 拟定结构式级数为12的传动副数为2或3的传动方案有以下几种:42132212⨯⨯= 63122312⨯⨯= 62123212⨯⨯= 24123212⨯⨯= 36122312⨯⨯= 26132212⨯⨯=41232212⨯⨯= 61323212⨯⨯= 61222312⨯⨯= 14223212⨯⨯= 16332212⨯⨯= 16222312⨯⨯= 21422312⨯⨯= 13632212⨯⨯= 21632212⨯⨯= 12422312⨯⨯= 31623212⨯⨯= 12623212⨯⨯=根据级比规律和传动副前多后少、传动线前密后疏的的原则确定查表可获得12级转速为 40、56、80、112、160、224、315、450、630、900、1250、1800作转速图如下: 63122312⨯⨯=40 56 80 112 160 224 315 450 630 900 1250 1800r/min 1440r/min I II III IV2241.122max ≤===ϕ主u 符合要求4/14/141.144min ≥===--ϕ主u 符合要求最后扩大组的变速范围:841.1)12(6)1(===--i i P x i R ϕ符合要求带轮的直径计算(因功率参数等不详仅举例说明):查表取小带轮的基准直径为125mm 则大带轮直径)1(12ε-=id d ε取 =-⨯⨯=-=)015.01(1256.1)1(12εid d 197mm 查表取大带轮的基准直径为200mm齿轮齿数的确定:I II 轴之间的传动副共有3对 传动比为 1:1 1: 1:2如果采用模数相同的标准齿轮, 则三对传动副的齿轮和相同查表可得....96847260....,,,,,=z S取72=z S 可以确定 三个传动副的齿数为 1:1传动副 36 361:传动副 30 42 1:2传动副 24 48 同理可确定II III 轴的齿数和取 84 1:1传动副齿数取 42 42 1:传动副齿数取22 62 III IV 之间的传动副齿数和取 90 2:1的传动副齿数取 60 30 1:4的传动副齿数取 18 72转速误差的计算主轴各级转速所获得的实际转速按下面的公式计算321)1(21U U U d d n n ⨯-⨯=ε电实际1 2 3 4 5 6 7 8 9 10 11 12 理论转速 40 56 80 112 160 224 315 450 630 900 1250 1800 实际转速 1773 转速误差率(%)允许误差:%1.4)%141.1(10)%1(10=-⨯=-⨯ϕ 根据上表可知转速误差率在允许的范围内1800r/min4056 80 112 160 224 315 450 630 900 1250 1440r/min 电 I II III IV绘制传动系统图如下:27、某机床主轴转速n=100~1120r/min ,转速级数8=Z ,电动机的转速min /1440=电n ,试设计该机床的主传动系,包括拟定结构式和转速图,画出主传动系统图。
机械制造装备设计-习题解答

“机械制造装备设计”部分习题解答第一章:1—3 柔性化指的是什么?试分析组合机床、普通机床、数控机床、加工中心和柔性制造系统的柔性化程度.其柔性表现在哪里?答:机械制造装备的柔性化是机床可以调整以满足不同工件加工的性能。
柔性化包括产品结构柔性化和功能柔性化。
按照柔性化从高到低排列应为:普通机床、数控机床、加工中心、FMS、组合机床(专用机床)。
普通机床柔性化表现在功能多、适应性强,为功能柔性化;数控机床和加工中心改变加工程序即可适应新的需要,结构柔性化;FMS加工效率较高,改变调度和程序可适应新的需要,为结构柔性化;组合机床(专用机床)生产率高,专门设计,适应性差,基本上无柔性。
1-9 机械制造装备设计有哪些类型?它们的本质区别是什么?答:机械制造装备设计类型有创新设计、变型设计和模块化设计三种类型。
它们的本质区别:创新设计是一种新的理论、概念的设计,变型设计是在原设计基础上改变部分部件、参数或者结构的设计,模块化设计是采用预先设计的模块进行组合的一种设计方法。
目前大多为变型设计,模块化设计缩短了新产品设计开发的时间,创新设计的产品很少.1-15 设计的评价方法很多,结合机械制造装备设计,指出哪些评价方法较为重要,为什么?答:设计的评价方法有:技术经济评价、可靠性评价、人机工程学评价、结构工艺性评价、产品造型评价、标准化评价六种。
对于机械制造装备设计,这六种评价方法按重要程度由高向低排队一般是:可靠性评价、人机工程学评价、结构工艺性评价、标准化评价、技术经济评价、产品造型评价。
其原因是机械制造装备投资较大,使用周期较长。
为了保证产品质量、降低成本、提高可靠性和竞争能力,六种评价都是不可缺少的.可靠性评价对产品质量与可靠性进行评价;人机工程学评价产品设计在人机工程方面的合理性;结构工艺性评价是对产品结构便于加工制造的性能进行评价,以降低生产成本,缩短生产时间;技术经济评价综合评价产品技术的先进性和经济的合理性;标准化评价是在标准化方面对产品进行评价;而产品造型评价是对产品的外观设计的合理性和新颖性进行评价。
(完整版)机械制造装备设计课后习题答案整理
1-1 为什么说机械制造装备在国民经济发展中起着重要的作用?制造业是国民经济发展的支柱产业,也是科技技术发展的载体及使其转化为规模生产力的工具和桥梁。
装备制造业是一个国家综合制造能力的集中表现,重大装备研制能力是衡量一个国家工业化水平和综合国力的重要标准。
1-2 机械制造装备与其他工业化装备相比,特别强调应满足哪些要求?为什么?(需要看教材确认答案)1)柔性化精密化自动化机电一体化节材节能2)符合工业工程要求符合绿色工程要求1-3 柔性化指的是什么?试分析组合机床、普通机床、数控机床、加工中心和柔性制造系统的柔性化程度。
其柔性表现在哪里?1)柔性化有俩重含义:产品机构柔性化和功能柔性化。
2)数控机床、柔性制造单元或系统具有较高的功能柔性化程度。
在柔性制造系统中,不同工件可以同时上线,实现混流加工。
组合机床其柔性表现在机床可进行调整以满足不同工件的加工。
1-6机械制造装备的机电一体化体现在哪些方面?可获得什么好处?1)机械制造装备的机电一体化体现在:其系统和产品的通常结构是机械的,用传感器检测来自外界和机器内部运行状态的信息,由计算机进行处理,经控制系统,由机械、液压、气动、电气、电子及他们的混合形式的执行系统进行操作,使系统能自动适应外界环境的变化,机器始终处于正常的工作状态。
2)好处:1.对机器或机组系统的运行参数进行巡查和控制;2.对机器或机组系统工作程序的控制;3.用微电子技术代替传统产品中机械部件完成的功能,简化产品的机械结构。
1-7 对机械制造装备如何进行分类?1)加工装备:采用机械制造方法制造机器零件的机床。
2)工艺装备:产品制造是用的各种刀具、模具、夹具、量具等工具。
3)仓储运输装备:各级仓库、物料传送、机床上下料等设备。
4)辅助装备:清洗机和排屑装置等设备。
1-8工业工程指的是什么?如何在设计机械制造装备时体现工业工程的需求?1)工业工程:是对人、物料、设备、能源和信息能组成的集成系统进行设计,改善和实施的一门科学。
机械制造装备设计课后习题答案完整

第五章课后习题答案1机床夹具的作用是什么?有哪些要求?作用:1、保证加工精度2、提高生产率3、扩大机床的使用范围4、减轻工人的劳动程度,保证生产安全5、降低成本要求:1、保证加工精度2、夹具的总体方案应与生产纲领相适应3、安全、方便、减轻劳动强度4、排屑顺畅5、夹具应有良好的刚度、强度、结构工艺性1.机床夹具的组成部分有哪些?1、定位元件及定位装置用于确定工件正确位置的元件或装置2、夹紧元件及夹紧装置用于固定工件已获得的正确位置的元件或装置3、导向及对刀元件用于确定工件与刀具的相互位置的元件4、动力装置5、夹具体用于将各元件、装置连接在一块,并通过它将整个夹具安装在机床上6、其它元件及装置3.何为六点定位原理?何谓定位的正常情况和非正常情况?它们各包括哪些方面?六点定位原理:采用六个按一定规则布置的约束点,限制工件的六个自由度使工件实现完全定位。
正常情况:根据加工表面的位置尺寸要求,需要限制的自由度均已被限制,称定位的正常情况。
正常情况分为:a完全定位六个自由度全部被限制b不完全定位少于六个自由度被限制非正常情况:根据加工表面的位置尺寸要求,需要限制的自由度没有完全被限制,或某个自由度被两个或两个以上的约束重负限制,称为非正常情况非正常情况分为:a.欠定位需要限制的自由度没有完全被限制b.过定位某个自由度被两个或两个以上的约束重负限制4、确定夹具的定位方案时,要考虑哪些方面的要求?在多个表面参与定位时:限制自由度最多的定位面——第一定位基准面或主基准面限制自由度较多的定位面——第二定位基准面或导向基准限制一个自由度的定位面——第三定位基准面或定程基准5、何谓定位误差?定位误差是由哪些因素引起的?定位误差:指工序基准在加工方向上的最大位置变动量所引起的加工误差,它是加工误差的一部分产生定位误差的原因:1、基准不重合带来的定位误差2、间隙引起的定位误差3、与夹具有关的因素产生的定位误差6、夹紧和定位的区别?对夹紧装置的基本要求有哪些?定位是确定工件在机床上或夹具中占有正确位置的过程。
机械制造装备设计课后习题答案整理
制造业是国民经济发展的支柱产业,也是科技技术发展的载体及使其转化为规模生产力的工具和桥梁。
装备制造业是一个国家综合制造能力的集中表现,重大装备研制能力是衡量一个国家工业化水平和综合国力的重要标准。
1-2 机械制造装备与其他工业化装备相比,特别强调应满足哪些要求?为什么?(需要看教材确认答案)1)柔性化精密化自动化机电一体化节材节能2)符合工业工程要求符合绿色工程要求1-3 柔性化指的是什么?试分析组合机床、普通机床、数控机床、加工中心和柔性制造系统的柔性化程度。
其柔性表现在哪里?1)柔性化有俩重含义:产品机构柔性化和功能柔性化。
2)数控机床、柔性制造单元或系统具有较高的功能柔性化程度。
在柔性制造系统中,不同工件可以同时上线,实现混流加工。
组合机床其柔性表现在机床可进行调整以满足不同工件的加工。
1-6机械制造装备的机电一体化体现在哪些方面?可获得什么好处?1)机械制造装备的机电一体化体现在:其系统和产品的通常结构是机械的,用传感器检测来自外界和机器内部运行状态的信息,由计算机进行处理,经控制系统,由机械、液压、气动、电气、电子及他们的混合形式的执行系统进行操作,使系统能自动适应外界环境的变化,机器始终处于正常的工作状态。
2)好处:1.对机器或机组系统的运行参数进行巡查和控制;2.对机器或机组系统工作程序的控制;3.用微电子技术代替传统产品中机械部件完成的功能,简化产品的机械结构。
1-7 对机械制造装备如何进行分类?1)加工装备:采用机械制造方法制造机器零件的机床。
2)工艺装备:产品制造是用的各种刀具、模具、夹具、量具等工具。
3)仓储运输装备:各级仓库、物料传送、机床上下料等设备。
4)辅助装备:清洗机和排屑装置等设备。
1-8工业工程指的是什么?如何在设计机械制造装备时体现工业工程的需求?1)工业工程:是对人、物料、设备、能源和信息能组成的集成系统进行设计,改善和实施的一门科学。
2)产品设计符合工业工程的需求:在产品开发阶段,充分考虑结构的工艺性,提高标准化、通用化程度,以便采用最佳的工艺方案,选择最合理的制造设备,减少工时和材料的消耗;合理地进行机械制造装备的总体布局,优化操作步骤和方法,减少操作过程中工人的体力消耗;对市场和消费者进行调研,保证产品合理的质量标准,减少因质量标准定得过高造成不必要的超频工作量。
(完整版)机械制造装备设计课后习题答案整理
1-1 为什么说机械制造装备在国民经济发展中起着重要的作用?制造业是国民经济发展的支柱产业,也是科技技术发展的载体及使其转化为规模生产力的工具和桥梁。
装备制造业是一个国家综合制造能力的集中表现,重大装备研制能力是衡量一个国家工业化水平和综合国力的重要标准。
1-2 机械制造装备与其他工业化装备相比,特别强调应满足哪些要求?为什么?(需要看教材确认答案)1)柔性化精密化自动化机电一体化节材节能2)符合工业工程要求符合绿色工程要求1-3 柔性化指的是什么?试分析组合机床、普通机床、数控机床、加工中心和柔性制造系统的柔性化程度。
其柔性表现在哪里?1)柔性化有俩重含义:产品机构柔性化和功能柔性化。
2)数控机床、柔性制造单元或系统具有较高的功能柔性化程度。
在柔性制造系统中,不同工件可以同时上线,实现混流加工。
组合机床其柔性表现在机床可进行调整以满足不同工件的加工。
1-6机械制造装备的机电一体化体现在哪些方面?可获得什么好处?1)机械制造装备的机电一体化体现在:其系统和产品的通常结构是机械的,用传感器检测来自外界和机器内部运行状态的信息,由计算机进行处理,经控制系统,由机械、液压、气动、电气、电子及他们的混合形式的执行系统进行操作,使系统能自动适应外界环境的变化,机器始终处于正常的工作状态。
2)好处:1.对机器或机组系统的运行参数进行巡查和控制;2.对机器或机组系统工作程序的控制;3.用微电子技术代替传统产品中机械部件完成的功能,简化产品的机械结构。
1-7 对机械制造装备如何进行分类?1)加工装备:采用机械制造方法制造机器零件的机床。
2)工艺装备:产品制造是用的各种刀具、模具、夹具、量具等工具。
3)仓储运输装备:各级仓库、物料传送、机床上下料等设备。
4)辅助装备:清洗机和排屑装置等设备。
1-8工业工程指的是什么?如何在设计机械制造装备时体现工业工程的需求?1)工业工程:是对人、物料、设备、能源和信息能组成的集成系统进行设计,改善和实施的一门科学。
机械制造装备设计复习

CH2智能制造1)CPS(cyber physical systems )定义:信息物理系统(cyber physical systems,简称CPS)作为计算进程和物理进程的统一体,是集成计算、通信与控制于一体的下一代智能系统。
信息物理系统通过人机交互接口实现和物理进程的交互,使用网络化空间以远程的、可靠的、实时的、安全的、协作的方式操控一个物理实体。
信息物理系统包含了将来无处不在的环境感知、嵌入式计算、网络通信和网络控制等系统工程,使物理系统具有计算、通信、精确控制、远程协作和自治功能。
2)智能制造定义:基于CPS技术,构建‘状态感知-实时分析-自主决策-精准执行-学习提升’的数据闭环,以软件形成的数据自动流动来消除复杂系统的不确定性,在给定的时间、目标场景下,优化配置资源的一种制造范式。
(赵敏)该定义所涉及的各项基本要素是:智能机理:状态感知-实时分析-自主决策-精准执行-学习提升;操作对象:数据(信息与知识的载体);使能:软件中的算法与规则(数字化知识);本质:数据自动流动,并因自动流动而形成知识泛在;目的:消除复杂系统的不确定性;约束:给定时空场景;价值:优化配置制造资源。
3)AGV:是自动导引运输车(Automated Guided Vehicle)的英文缩写。
是指装备有电磁或光学等自动导引装置,能够沿规定的导引路径行驶,具有安全保护以及各种移载功能的运输车,AGV属于轮式移动机器人(WMR――Wheeled Mobile Robot)的范畴。
AGV一般以电池为动力。
AGV装有非接触导航(导引)装置,可实现无人驾驶的运输作业。
它的主要功能表现为能在计算机监控下,按路径规划和作业要求,精确地行走并停靠到指定地点,完成一系列作业功能。
自动化立体库(AGV)、自动上下料等智能装备的应用,以及设备的M2M 智能化改造,实现物与物、人与物之间的互联互通与信息握手。
4)机器人:典型的六自由度关节型机器人主要由机器人本体及控制系统两大部分组成。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
制造装备课后答案26、某车床的主轴转速n=40~1800r/min ,公比41.1=ϕ电动机的转速min /1440=电n ,试拟定结构式,转速图;确定齿轮的齿数、带轮的直径;演算转速误差;画出主传动系统图。
解:该主轴的变速范围为: 45401800min max ===n n R n 根据变速范围、公比可求变速的级数12141.1lg 45lg 1lg lg ≈+=+=ϕn R Z 拟定结构式级数为12的传动副数为2或3的传动方案有以下几种:42132212⨯⨯= 63122312⨯⨯= 62123212⨯⨯= 24123212⨯⨯= 36122312⨯⨯= 26132212⨯⨯= 41232212⨯⨯= 61323212⨯⨯= 61222312⨯⨯= 14223212⨯⨯= 16332212⨯⨯= 16222312⨯⨯= 21422312⨯⨯= 13632212⨯⨯= 21632212⨯⨯= 12422312⨯⨯= 31623212⨯⨯= 12623212⨯⨯=根据级比规律和传动副前多后少、传动线前密后疏的的原则确定查表可获得12级转速为 40、56、80、112、160、224、315、450、630、900、1250、1800 作转速图如下:63122312⨯⨯= 1251800r/min2241.122max ≤===ϕ主u 符合要求 4/14/141.144min ≥===--ϕ主u 符合要求最后扩大组的变速范围:841.1)12(6)1(===--i i P x i R ϕ符合要求带轮的直径计算(因功率参数等不详仅举例说明):查表取小带轮的基准直径为125mm 则大带轮直径)1(12ε-=id d ε取0.015 =-⨯⨯=-=)015.01(1256.1)1(12εid d 197mm 查表取大带轮的基准直径为200mm齿轮齿数的确定:I II 轴之间的传动副共有3对 传动比为 1:1 1:1.41 1:2 如果采用模数相同的标准齿轮, 则三对传动副的齿轮和相同查表可得 (9684)7260....,,,,,=z S取72=z S 可以确定 三个传动副的齿数为 1:1传动副 36 361:1.41传动副 30 42 1:2传动副 24 48 同理可确定II III 轴的齿数和取 84 1:1传动副齿数取 42 42 1:2.82传动副齿数取22 621800r/min4056 80 112 160 224 315 450 630 900 1250III IV 之间的传动副齿数和取 90 2:1的传动副齿数取 60 30 1:4的传动副齿数取 18 72转速误差的计算主轴各级转速所获得的实际转速按下面的公式计算321)1(21U U U d d n n ⨯-⨯=ε电实际 1 2 3 4 5 6 7 8 9 10 11 12 理论转速 40568011216022431545063090012501800实际转速 39.32 56.17 78.64 110.81 158.30 221.63 314.56 449.38 629.13 886.5 1266.43 1773 转速误差率(%)1.700.311.701.061.061.060.140.140.141.51.311.5允许误差:%1.4)%141.1(10)%1(10=-⨯=-⨯ϕ 根据上表可知转速误差率在允许的范围内绘制传动系统图如下:27、某机床主轴转速n=100~1120r/min ,转速级数8=Z ,电动机的转速min /1440=电n ,试设计该机床的主传动系,包括拟定结构式和转速图,画出主传动系统图。
2.111001120min max ===n n R n ===-712.11Z n R φ 1.41查表可获得8级转速为 100,140,200,280,400,560,800,1120 拟定8级转速的结构式:4212228⨯⨯= 2412228⨯⨯= 4122228⨯⨯= 1422228⨯⨯= 2142228⨯⨯= 1242228⨯⨯=根据级比规律和传动副前多后少、传动线前密后疏的的原则确定4212228⨯⨯=400 560 800 1120241.141.111max ≤===ϕ主u 符合要求4/182.2/141.133min ≥===--ϕ主u 符合要求最后扩大组的变速范围:8441.1)12(4)1(≤===--i i P x i R ϕ符合要求带轮的直径计算(因功率参数等不详仅举例说明):查表取小带轮的基准直径为125mm 则大带轮直径)1(12ε-=id d ε取0.015 =-⨯⨯=-=)015.01(1258001440)1(12εid d 221.625mm 查表取大带轮的基准直径为224mm齿轮齿数的确定:I II 轴之间的传动副共有2对 传动比为 1:1 1:1.41 如果采用模数相同的标准齿轮, 则三对传动副的齿轮和相同查表可得 (8472)6048....,,,,,=z S取48=z S 可以确定 两个传动副的齿数为 1:1传动副 24 24 1:1.41传动副 20 28同理可确定II III 轴的齿数和取 60 1:1传动副齿数取 30 30 1:2传动副齿数取20 40 III IV 之间的传动副齿数和取 72 1.41:1的传动副齿数取 42 30 1:2.82的传动副齿数取 19 53转速误差的计算主轴各级转速所获得的实际转速按下面的公式计算321)1(21U U U d d n n ⨯-⨯=ε电实际1 2 3 4 5 6 7 8 理论转速 1001402002804005608001120 实际转速 100.98 141.25 201.78 282.49 394 551.6 788 1103.2 转速误差率(%)0.890.890.890.891.51.51.51.5允许误差:%1.4)%141.1(10)%1(10=-⨯=-⨯ϕ 根据上表可知转速误差率在允许的范围内绘制传动系统图如下:28试从26.1=ϕ,18=Z 级变速机构的各种传动方案中选出最佳方案,并写出结构式,画出转速图和传动系统图。
转速不重复的方案:93123318⨯⨯= 39132318⨯⨯= 91323318⨯⨯= 19332318⨯⨯= 31933218⨯⨯= 13933218⨯⨯= 62133218⨯⨯= 26133218⨯⨯= 61232318⨯⨯=16223318⨯⨯= 12623318⨯⨯= 21632318⨯⨯= 63132318⨯⨯= 36123318⨯⨯= 61333218⨯⨯= 16333218⨯⨯= 31623318⨯⨯= 13632318⨯⨯=转速重复的方案()12223186631-⨯⨯⨯= ()12232186613-⨯⨯⨯=()12232186621-⨯⨯⨯=等 根据级比规律和传动副前多后少、传动线前密后疏的的原则确定93123318⨯⨯= 也可选择转速重复的方案。
假定最小转速为31.5r/min 查表可得各级转速为31.5, 40,50,63,80,100,125,160,200,250,315,400,500,630,800,1000,1250,1600。
125 160 200 250 315 400 500 630 800 1000 1250 1600r/min 40 50 63 80 1002226.133max ≤===ϕ主u 符合要求4/14/126.166min ≥===--ϕ主u 符合要求最后扩大组的变速范围:8826.1)12(9)1(≤===--i i P x i R ϕ符合要求带轮的直径计算(因功率参数等不详仅举例说明):查表取小带轮的基准直径为125mm 则大带轮直径)1(12ε-=id d ε取0.015 =-⨯⨯=-=)015.01(1258001440)1(12εid d 221.625mm 查表取大带轮的基准直径为224mm齿轮齿数的确定:I II 轴之间的传动副共有2对 传动比为 1:1 1:1.25 1:1.6 如果采用模数相同的标准齿轮, 则三对传动副的齿轮和相同查表可得 (72)5452....,,,,,=z S取72=z S 可以确定 三个传动副的齿数为 1:1传动副36 36 1:1.25传动副 32 40 1:1.6传动副 28 44同理可确定II III 轴的齿数和取 84 1:1传动副齿数取 42 42 1:2传动副齿数取28 56 1:4传动副齿数取17 67 III IV 之间的传动副齿数和取90 2:1的传动副齿数取 60 30 1:4的传动副齿数取 18 72φ转速误差的计算主轴各级转速所获得的实际转速按下面的公式计算321)1(21U U U d d n n ⨯-⨯=ε电实际1 2 3 4 5 6 7 8 9 理论转速 31.5 40 50 6380 100 125 160 200实际转速 31.81 39.98 49.99 62.68 78.8 98.5 125.36 157.6 197 转速误差率(%)0.980.030.030.511.51.50.291.51.510 11 12 13 14 15 16 17 18 理论转速 250 315 400 500 630 800 1000 1250 1600实际转速 254.47 319.90 399.88 492.5 630.4 788 1002.9 1260.8 1576 转速误差率(%)1.791.511.50.030.635 1.50.290.8641.5允许误差:%6.2)%126.1(10)%1(10=-⨯=-⨯ϕ仅供学习与交流,如有侵权请联系网站删除 谢谢11 根据上表可知转速误差率在允许的范围内29、用于成批生产的车床,主轴转速45~500r/min ,为简化机构选用双速电机,n 电=720r/min和1440r/min ,试画出该机床的转速度和传动系统图。
采用双速电机时公比一般取1.41和1.26 本例中取1.4111.1145500min max ===n n R n 8141.1lg 11.11lg 1lg lg ≈+=+=ϕn R Z 查表可获得8级转速为45,63,90,125,180,250,360,500 拟定8级转速的结构式:4212228⨯⨯= 2412228⨯⨯= 4122228⨯⨯= 1422228⨯⨯= 2142228⨯⨯= 1242228⨯⨯=选用多速电机是将多速电机作为第一扩大组放在传动式前面基本组放在第一扩大组的后面 因此确定最后的结构式为4122228⨯⨯=I 轴的带轮转速为720r/min 查表取小带轮的基准直径为125mm则大带轮直径)1(12ε-=id d ε取0.015 =-⨯⨯=-=)015.01(1257201440)1(12εid d 246.25mm 查表取大带轮的基准直径为250mm4563 90 125 180 250 360 500 I II III 720 1000 1440 720r/mi n仅供学习与交流,如有侵权请联系网站删除 谢谢241.141.111max ≤===ϕ主u 符合要求4/182.2/141.133min ≥===--ϕ主u 符合要求最后扩大组的变速范围:8441.1)12(4)1(≤===--i i P x i R ϕ符合要求齿轮齿数的确定:I II 轴之间的传动副共有2对 传动比为 1:2 1:2.82 如果采用模数相同的标准齿轮, 则三对传动副的齿轮和相同查表可得 (75)7269....,,,,,=z S取69=z S 可以确定 三个传动副的齿数为 1:2传动副23 46 1: 2.82传动副 18 51同理可确定II III 轴的齿数和取 72 1.41:1传动副齿数取 42 30 1:2.82传动副齿数取19 53转速误差的计算主轴各级转速所获得的实际转速按下面的公式计算21)1(21U U d d n n ⨯-⨯=ε电实际1 2 3 4 5 6 7 8 理论转速 45 63 90 125180 250 360 500实际转速 44.87 63.56 89.73 127.12 175.21 248.22 350.43 496.44 转速误差率(%)0.297 0.890.297 1.72.660.712.660.71允许误差:%1.4)%141.1(10)%1(10=-⨯=-⨯ϕ 根据上表可知转速误差率在允许的范围内33、某数控机床,主轴最高转速m in /4000max r n =,最低转速m in /40min r n =,计算转速为min /160r n j =,采用直流电动机,电动机功率=15kw ,电动机的额定转速m in /1500r n d =,最高转速为m in /4500max r n d =,试设计分级变速箱的传动系,画出转速图和功率特性图,以及主传动系统图。