Smartbird 德国机器鸟---破解鸟类飞行原理
驱鸟设备原理一角

设备原理一角1、遥控多管煤氧排炮遥控多管煤氧气排炮是根据气体燃烧的原理,利用变频脉冲式高压包带动火花塞点火,使炮管内的氧气和液化气燃爆,发出声响,单管发出的炮响声音等级可达130分贝以上,使用12V蓄电池作为电源,产品内置小型控制板,可遥控或手动控制设备发射。
该设备可根据各场站的实际情况进行固定或移动式使用,可单发或连发进行驱鸟。
性能参数:●质量:300kg●尺寸:1950mm×900mm×1700mm●遥控距离:不小于20m●无线频率:315MHZ●爆响声压:10.5V~12.6V●炮管仰角:75°~90°2、QN/MQP型遥控驱鸟煤气炮新一代QN/MQP型太阳能无线遥控/程控式驱鸟煤气炮。
该炮具有体积小、重量轻、威力大、控制距离远、可实现无人看守等优点,控制部分全部采用大规模集成电路,稳定可靠,故障率低。
程控设备可自由设定开关机时间和自动发炮时间,输入参数后煤气炮可自行工作。
遥控设备的范围可辐射整个飞行区,发射频率对机场和航班的通讯无任何影响。
煤气炮采用不锈钢结构,控制部分的防护等级达到IP65,适合在恶劣气象条件下长期使用。
供电电源采用12V免维护蓄电池储电,太阳能电池板充电的方式免去了铺设电缆的高额成本,并可保证连续30个阴雨天气下使用。
安装和维护十分方便。
性能参数:●外形尺寸:1110×420×960(长×宽×高)●燃气类型:普通家用液化石油气(标准型气瓶)●燃气消耗:10公斤液化石油可供发炮月20,000次●发炮间隔:可调整●发炮声压:120dB/10m;(±10%)●发射范围:半径0.8公里(单台组网为0.8公里;多台组网使用中继器,遥控距离可以无限拓展)●供电方式:12VDC免维护型蓄电池●充电方式:12VDC太阳能电池板对蓄电池充电,可保证连续30个阴雨天气下使用3、一键式驱鸟系统-钛雷炮性能特点:a)遥控距离:不小于3km;b) 钛雷炮控制系统主要由CPU、无线通信系统、点火储能单元、安全控制电路、点火控制电路、炮弹检测单元、蓄电池检测单元、供电模块组成。
扑翼机器鸟的工作原理分析
扑翼机器鸟的工作原理分析
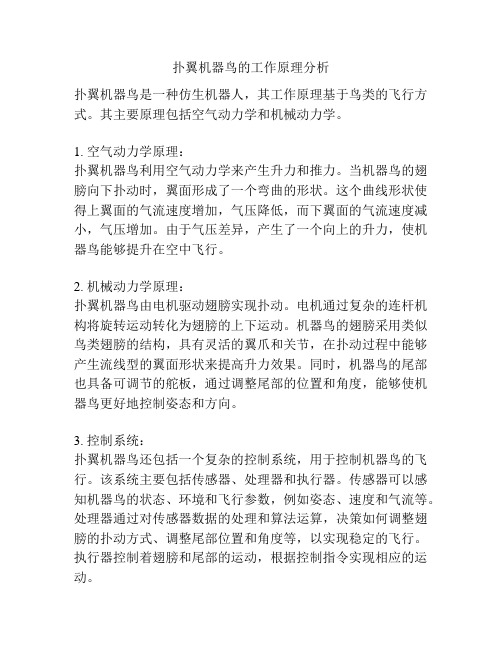
扑翼机器鸟是一种仿生机器人,其工作原理基于鸟类的飞行方式。
其主要原理包括空气动力学和机械动力学。
1. 空气动力学原理:
扑翼机器鸟利用空气动力学来产生升力和推力。
当机器鸟的翅膀向下扑动时,翼面形成了一个弯曲的形状。
这个曲线形状使得上翼面的气流速度增加,气压降低,而下翼面的气流速度减小,气压增加。
由于气压差异,产生了一个向上的升力,使机器鸟能够提升在空中飞行。
2. 机械动力学原理:
扑翼机器鸟由电机驱动翅膀实现扑动。
电机通过复杂的连杆机构将旋转运动转化为翅膀的上下运动。
机器鸟的翅膀采用类似鸟类翅膀的结构,具有灵活的翼爪和关节,在扑动过程中能够产生流线型的翼面形状来提高升力效果。
同时,机器鸟的尾部也具备可调节的舵板,通过调整尾部的位置和角度,能够使机器鸟更好地控制姿态和方向。
3. 控制系统:
扑翼机器鸟还包括一个复杂的控制系统,用于控制机器鸟的飞行。
该系统主要包括传感器、处理器和执行器。
传感器可以感知机器鸟的状态、环境和飞行参数,例如姿态、速度和气流等。
处理器通过对传感器数据的处理和算法运算,决策如何调整翅膀的扑动方式、调整尾部位置和角度等,以实现稳定的飞行。
执行器控制着翅膀和尾部的运动,根据控制指令实现相应的运动。
综上所述,扑翼机器鸟的工作原理基于空气动力学和机械动力学原理,通过复杂的控制系统实现对飞行状态的调节和控制。
智能鸟 SmartBird——FESTO

智能鸟智能鸟是一种超轻型但强大的飞行模型,它具有良好的空气动力特性和极端的灵活性。
凭借智能鸟,费斯托公司已成功破解了鸟类的飞行。
这个仿生技术的载体的灵感来自于鲱鱼鸥,它可以不需要有额外的驱动机制来完成自主飞行和着陆。
它的翅膀不仅可以上下跳动,还能扭转一定的角度。
这是由一个活跃的铰接扭转驱动器与另一个复杂的控制系统组成,使飞行操作有了空前的效率。
费斯托因此成功地第一次意识到自然的节能技术可以适应于模型。
如何实现自动化:凭借耦合驱动单元的功能整合, 费斯托公司产生了很多想法和见解,他们发现可以将转移到混合动力驱动技术的开发和优化。
最小的用料和极轻质结构铺平了资源和能源消耗效率相互协调的道路。
在收购了空气动力学和流动行为的知识后,产生了用新的方法的解决方案的自动化。
对鸟类飞行的迷恋:一个人类最古老的梦想是像鸟儿一样飞翔,自由地在空中到处翱翔,从高处“鸟瞰”整个世界。
同样令人着迷的是鸟类的飞翔。
鸟使用他们的翅膀实现升降只需要用肌肉力量,用肌肉产生必要的推力来克服空气阻力,并控制自己的身体保持在空气中的运动,它本身没有任何旋转“组件”。
大自然巧妙地实现了升力和推进力的功能整合。
鸟为了生存,根据空气的变化控制命令自己身体,完全自主地调节自己的动作。
为此,他们用自己的感觉器官。
科学的先驱者们:早在1490年,达芬奇初步建成以鸟类拍打翅膀为基础的机翼模型,以进一步实现类似于鸟类的飞行。
而在1889年,奥托•李林塔尔就出版了一本名为《以鸟类飞行为基础的航空学:一个对航空领域的巨大贡献》的书,在“鸟的模型”这一章节,奥托•李林塔尔详细介绍海鸥的飞行。
在更近的一些时期,我们就已经看到了扑翼飞机项目的发展,就如詹姆士教授和他的研究团队在多伦多大学所做的研究。
在2006年,这个研究小组通过一个由扑翼机械结构驱动的飞行模型,在飞行员的操作下第一次实现了在跑道上的起飞。
在2010年8月,一个飞行器在被托起到飞行高度后,单单靠飞行员肌肉力量的控制,就飞行了大约150米的距离。
鸟飞行力学原理分析

鸟飞行力学分析
根据力学原理,鸟儿羽翼作向下和向后扇(振)动以获得向上的升力和向前的推力,这一基本动作是由鸟翅膀中骨骼呈波浪式往复运动牵引鸟翼整体作圆周运动而完成。
这种动作为理想的飞行力学原理,鸟翼向其它任何方向运动都会呈现不必要的动力损耗。
由此可见机械鸟翼的仿生制作必须符合这一条件才不会另外获取向前的推力,即羽翼(羽毛和翼羽骨一体)在空气中(从鸟侧向看)作圆周运动(由翼臂与翼羽骨的关节牵引羽翼运动),从前(后)向两侧延伸方向看是呈波浪形往复。
鸟翼臂运动规律为以鸟体连接处为支点,关节相对支点作圆锥状运动。
如图1:翅膀骨骼运行规律及翼羽形状;图2:左翼运动原理图
图1
图2。
驱鸟器的工作原理

金能电力驱鸟器
强光频闪超声波驱鸟器:超声波加强光频闪,再 配上太阳能供电板,持续持久的驱鸟效果,无须 电池吸收太阳能能量。
智能综合驱鸟器:超声波加强光频闪和语音,配上 先进的雷达探测拾音器,太阳能供电。驱鸟半径 可长达11亩地,现如今成为果农的福音。
驱鸟现状
驱鸟器的具体分类
1.风力反光驱鸟器:采用转动式和反光式驱鸟措施,反射 太阳光使鸟类受惊而逃跑。
2.驱鸟刺:利用鸟刺覆盖住需要防鸟的地方,使鸟不能在 此无法停留,如果是弹簧式防鸟刺,有风的情况下,鸟刺 互相撞击产生声音,使鸟受到惊吓不敢靠近。
3.语音超声波驱鸟器:利用声波音效发出仿真天敌、同类 的警告、悲鸣声。
随着国内外生态环境的 改善和人民保护鸟类的 意识的提高,鸟类越来 越多。这给世界和中国 军民用航空业却带来了 灾难。为了保护航空安 全,维护乘客的财产和 生命安全,机场采取了 各种各样的驱鸟措施, 如:驱鸟稻草人、充气 人、自动激光驱鸟器、 炮竹弹、爆音驱鸟、煤 气炮、驱鸟剂、驱鸟枪、 驱鸟猎鹰、驱鸟车、探 鸟雷达等各种各样的手 段,这些手段都起到了 一定的效果。但世界范 围内还没有一种能解决 全空域、全时间段得全 能手段来驱鸟。驱鸟是 一个世界性难题,是一 个亟待解决的难题。
4.全智能驱鸟器:实时给机场鸟控办人员提供机场里面及 机场周围有害鸟类的活动水平和准确位置,它就像机场里 面的一双电子望远镜,能够全方位持续地、更远地探测鸟 情。
驱鸟器的发展前景
驱鸟逐渐向综合驱鸟和生态驱鸟的方向发展,新型的驱鸟 设备不断出现。以前采取的猎杀等手段不在采用,驱鸟逐 渐走向生态和绿色驱鸟,高科技元素不断在新型驱鸟设备 中体现,这体现了人民生态意识的增强和世界范围内科技 实力的提高。驱鸟急需解决鸟类易产生适应性、驱鸟范围 小、有效时间短、成本高、没有针对性盲目驱鸟的问题。 解决这些问题,也就是以后驱鸟发展的方向和前景。
鸟造飞机的原理
鸟造飞机的原理人类历史上长期以来一直都有一种梦想,那就是和鸟类一样能够在空中自由飞翔。
随着科技的发展和对自然界的深入研究,人们逐渐理解了鸟类的飞行原理,并将这些原理应用到了机械飞行器的设计上。
本文将深入探讨鸟类飞行中的物理原理,以及如何将其运用到飞机制造当中。
鸟类的飞行基本上取决于它们的两对翼。
鸟类的翅膀非常灵活,可以改变形状和方向,从而使鸟类能够在空中自由飞翔。
翅膀的左右摆动和翼面表面的凸起和凸起决定了鸟类的升力、飘移和稳定性。
要使翅膀在空气中产生升力,必须打破空气的运动平衡,让空气从翼面上的高压区域流向低压区域,形成升力。
鸟类翅膀的上表面比下面更为凸起,从而使流经上面的空气速度更快,压力更低,下面相反。
这个流动现象称为自然分离。
流过翅膀时,空气从上面的尖端开始减速,并且从下面加速,当达到翼面中点位置时,两条流线汇合,向后将形成后缘的一个漩涡,使翼面上的压力下降,从而造成翅膀上方的负压。
鸟类通过煽动翅膀运动产生的气流也对其施加了推力,使鸟类向上飞行。
鸟类通过翅膀的衔接和控制可以调整其翼面相对运动的方向和角度,从而改变其升力和速度。
此外,鸟类在飞行时还要考虑抬高或降低翼尖,从而改变机翼的横截面积,以调节翼面的升力系数。
飞机基本上也是利用了鸟类飞行的原理。
飞机的翼面设计是模仿鸟类的翅膀结构,其横截面呈现出空气快速流经上部的弯曲形状,下部则是比较平直的形状。
这种特殊的翼型使得快速流过上部的空气形成了低压区域,而流过下部的空气则形成了高压区域,从而产生了飞机的升力。
与此同时,飞机还利用尾翼产生剪力,促使飞机向上飞行。
此外,飞机的发动机驱动飞机前进,而由于空气的惯性,流入发动机的空气速度比其喷出的气体速度更快,从而产生向后的推进力。
当然,与鸟类不同之处在于飞机不能像鸟类一样通过煽动翅膀运动产生升力,而是通过引擎的力量使飞机前进,在飞行过程中利用机翼产生升力,从而形成飞行的重力与升力平衡。
结论总的来说,鸟类能够飞翔的原因是它们的翅膀结构,以及翅膀运动和控制技能。
德国机械鸟组成和动作原理

解读德国“聪明鸟”的扑翼机构(组成和动作原理)自从电视台播放了德国人“聪明鸟”的飞行录像后,它一直在吸引着我。
为此,我曾无数次地观看了由老鹰先生提供的录像资料。
一直在关注着该鸟扑翼机构的组成和动作原理。
今天想就该鸟的组成和动作原理做一解读,以愿与有兴趣的社友共同讨论。
组成:经解化后的组成如下图所示:图--(1)组成有:前后支架,翅膀主骨,翅膀副骨,翅膀外翼主骨,翅膀骨架固定轴,动力齿轮,翅膀付轴,联动板,三合一连杆,1#~5#支架,前缘,后缘,筋。
这1#~5#支架的结构中都有一个有一定宽度的圆孔:图--(2)它的直径与翅膀主骨的直径相等,用来与翅膀主骨作同轴配合。
1#~5#支架的前缘端点与前缘构件焊合,后缘端点与后缘构件焊合。
联动板与筋构成一个整体(图中绘成了两个构件),筋与1#~5#支架的合适位置焊合在一起。
付翼主骨的外端点焊合在一起。
如此,整个翅膀的所有构件就组成了一个整体。
动作原理:为了便于叙述,将5#支架左侧的翅膀称为主翼,右侧部分称为副翼。
整个翅膀的动作由三部分作成:1.主翼的扑打动作;2.副翼的扑打动作;3.主付翼的扭转动作。
主翼的扑打动作:其实,主翼的扑打动作是由一个简单的四连杆机构就可以完成:主翼的扑打动作:图--(3)它由动力齿轮带动连杆,连杆带动翅膀主骨摆动翅膀。
如果将其绘成机构简图,如图--(4)所示:图--(4)动画:翅膀主骨运动付翼的扑打动作:相较主翼的扑打动作付翼的扑打动作就比较复杂。
它是由一个四边形机构,借助主翼摆动机构中的连杆的带动来完成。
它的动作既与主翼同步,又有与主翼之间存在相对运动的动作。
图--(5)将其绘成机构简图如图--(6):图--(6)在图--(4)中三合一连杆是由三个构件组成的:主连杆,副连杆,左连接板。
其实这三个构件已经构成了一个三角形,它是一个稳定的平面建构,所以可以将其合并成一个构件。
故称三合一连杆。
由图--(5)可以看出,当三合一连杆在曲柄的带动下,左右摆动的同时,也带动翅膀副骨的运动,在翅膀副骨的带动下,付翼主骨也就产生运动。
[转载]鸟类飞行的真实原理
![[转载]鸟类飞行的真实原理](https://img.taocdn.com/s3/m/ea9723cf77a20029bd64783e0912a21614797f62.png)
[转载]鸟类飞行的真实原理第一部分:鸟类飞行的真实原理附页流体学的计算原理与方法自行车运动员一字型行进的省力原理大雁人字型飞行的省力原理第二部分:探索本部分是以真空原理来解释的。
一、鱼类游泳(飞行)原理人类游泳(飞行)原理蛇类游泳原理软(弯曲、薄)翅膀鸟类(昆虫类)飞行(游泳)原理二、固定翼飞机的飞行(游泳)原理旋翼机(直升机)飞机飞行原理三、生物类持续飞行原理四、游泳中的抱水原理五、达朗贝尔预言的悖论第三部分:探寻流体全能飞行器用真空原理打造的流体全能飞行器,与陆地车辆行走、蓄电池、及其他技术合璧,可能生产出一种三栖动物式的科幻飞行器,将人类以省能源的形式,跨洲际、跨洋际旅行,它可以利用旅行途中的大气、水流自主补充能源,它的着陆与起飞可水上、水下任意三维度的。
第一部分鸟类飞行的真实原理至今人们对鸟类为什么能够在天上飞行,还无法理解。
本文从简略的原理,希望能够给您带来另类常识性的解答,揭开鸟类飞行的真实原理。
平时我们每个人身上受到空气的压力2万公斤,并不觉的重,那是因为空气对我们的压力是四面八方的平衡力,它们之间互相抵消了。
鸟类在空气中振动翅膀时,翅膀前面将空气挤入前方空气中,前方空气压力升高了,而翅膀后方没有空气,形成空洞区,吸引四周空气向其填充,空气压强逐渐回升。
在翅膀继续运动下,前方的空气在压力下逐渐沿翅膀周边流动到后方的低压区,填补空洞,形成翅膀周边环流。
翅膀前后产生了压力差,打破了翅膀前后面的空气平衡力,这个压力差使鸟类翅膀得到了升力。
当翅膀提供的升力超过鸟类重量时,鸟类就会起飞。
如果没有翅膀背面的空洞产生(即真空产生),鸟类就无法借助这个空洞区力(即真空区力)实现飞翔。
关于“真空区概念”请见本博文目录的另一篇文章空气是个很大的流动物体,为了方便,我们取其中的一小(微)块作为刚性重物来讨论,这样就简便多了。
设一刚性重物质量为m的物体,放置于普通的水平地面上,有一力F水平作用于该重物,方向向左,使重物产生加速度a。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
5 研究团队
费斯托公司发言人表示:“智能鸟用料极少,结构极轻,具 有很高的能效。”除了拥有先进的性能外,酷似真鸟的外观也足 以让所有人惊叹不已。智能鸟的移动和拍翅方式与真鸟非常接 近,在空中飞行时很容易被误认为一只真正的鸟。
6 参考资料
[1] Festo官网介绍
/net/SupportPortal/Files/46270/Brosch_SmartBird_en_8s_RZ_ 300311_lo.pdf
4 结构组成
结构 外罩 电池 伺服驱动 功率 微控制器 无线传输 电机 传感器 加速度计 电量管理 LED驱动器 轻质碳纤维结构 聚氨酯泡沫挤压成型 2个锂电池电源,7.4V,450mA 2个数字伺服单元控制首尾,3.5kg驱动力 2个数字伺服单元扭转扑翼,0.03s行程45° 23W MCU LM3S811;32位微控制器 50MHz64KB闪存;8KB RAM 868MHz/2.4GHz双向无线传输 135无刷电机 电机定位TLE4906霍尔传感器 LIS302DLH 2个锂电池单元与ACS715电压电流监控 TPIC2810D
/view/567a5bec19e8b8f67view/60846a1a227916888486d765.html
[6] 优酷视频:费斯托智能鸟 破译鸟类飞行原理 仿生鸟扑翼飞 行器(广告稍长)
[2] 如鸟儿飞翔的机器人(无广告)
/talks/a_robot_that_flies_likew构
SmartBird
(聪明鸟)
破译 鸟类飞行原理
一项富有革命性的设计,能够自动起飞、飞行和降落。
yc9746324martBird[1]是科技公 司Festo的科学家研制出 的一款既能够模拟鸟类 飞行也能够极逼真地扑 动翅膀的机器鸟。
2 性能指标
躯干长度 翼展 重量 功率 1.07m 2.00m 0.450kg 23W
•
德国科技公司费斯托(FESTO)依据来自鲱鱼银鸥的灵感, 研制出这只仿真机器鸟,它的体重只有450克,两翼宽1.96公 尺,可利用杠杆原理上下拍动,还可以按照一定角度扭转身体、 摆动尾巴和脑袋来改变方向。
Байду номын сангаас
3 设计原理
• “Smart Bird”的扑翼运动可以分解成三个分运动::1、主翼的扑 打运动;2、副翼的扑打运动;3、主翼和副翼之间的扭转运动。 这三个运动都是绕坐标轴的转动。
4 结构组成
SmartBird的躯干内装设有充电 电池、发动机、变速箱、曲柄轴 和电子控制器。两翼配有双向无 线信号收发装置,能对飞行进行 即时调整。 SmartBird的翅膀角度可以通过 扭力马达调节。上行冲程时,马 达让翅膀朝上,提高SmartBird的 飞行高度,下行冲程时,马达则 让翅膀朝下。
/v_show/id_XNTQyMzAyODQ4.html?f=19166051