自动调整臂工作原理
自动调整臂工作原理

自动调整臂工作原理
自动调整臂是一种机械装置,用于实现多种工作任务的自动调整。
其工作原理主要包括以下几个步骤:
1. 感知环境:自动调整臂会使用传感器或视觉系统来感知周围的环境和目标物体。
这些传感器可以包括距离传感器、力度传感器、图像传感器等。
2. 收集信息:一旦感知到环境和目标物体,自动调整臂会收集相应的数据和信息。
这些数据可以包括目标物体的位置、形状、质量等。
3. 决策和规划:基于收集到的数据和信息,自动调整臂会进行决策和规划,确定最优的动作方案。
这可能涉及到路径规划、力控制、碰撞检测等算法和技术。
4. 执行动作:一旦确定了最优的动作方案,自动调整臂就会执行相应的动作,调整自身的位置、姿态、速度等来完成工作任务。
这可能涉及到关节控制、伺服控制、运动规划等技术。
5. 反馈控制:自动调整臂会不断地进行反馈控制,根据感知到的环境变化和实际执行的结果,对自身的动作进行调整和修正,以确保达到预期的工作效果。
总的来说,自动调整臂利用感知、信息处理、决策规划和执行控制等技术,通过不断调整自身的位置、姿态和动作,实现多
种工作任务的自动化调整。
这种自动化调整的原理和方法可以应用于各种领域,如工业生产、医疗护理、物流仓储等。
自动调整臂

自动调整臂1. 背景介绍自动调整臂是一种用于工业应用的机器人装置,它能够自动调整自身的姿态和位置,以适应各种工作环境和任务需求。
这种装置通常由多个关节组成,每个关节都能够运动并调整自身的角度和位置。
自动调整臂在许多领域都有广泛的应用,包括自动化生产线、仓储系统、医疗器械等等。
2. 工作原理自动调整臂的工作原理主要包括以下几个方面:2.1 传感器检测自动调整臂通常配备有多个传感器,用于感知周围的环境和目标物体的位置。
常见的传感器包括视觉传感器、力传感器、位置传感器等。
这些传感器能够实时采集环境信息,并传递给控制系统进行处理。
2.2 控制系统控制系统是自动调整臂的核心部分,它负责接收传感器采集到的数据,并根据预先设定的任务要求进行分析和决策。
控制系统能够计算出自动调整臂需要调整的姿态和位置,并输出相应的指令。
2.3 电机驱动自动调整臂中的每个关节都由电机驱动,用于实现关节的运动和调整。
电机驱动通常由控制系统发送的指令来控制,它能够通过调整关节的角度和位置,使得整个自动调整臂能够达到预定的目标姿态和位置。
2.4 反馈控制为了更加精确地控制自动调整臂的运动,通常会采用反馈控制的方法。
反馈控制通过不断检测调整臂的实际位置和姿态,并与目标位置和姿态进行比较,从而调整控制指令,使得自动调整臂能够更加准确地达到目标。
3. 应用场景自动调整臂在许多领域都有广泛的应用,以下是一些常见的应用场景:3.1 自动化生产线在自动化生产线中,自动调整臂可以用于搬运、拼装、焊接等工作。
它能够根据生产线上的物体位置和姿态进行自动调整,从而完成各种复杂的任务。
3.2 仓储系统在仓储系统中,自动调整臂可以用于货物的搬运和堆垛。
它可以根据货物的位置和重量进行自动调整,以适应不同大小和重量的货物。
3.3 医疗器械在医疗器械领域,自动调整臂可以用于手术机器人和检测设备等。
它可以根据手术区域和检测要求自动调整自身的姿态和位置,从而完成精确的手术和检测任务。
自动调整臂结构原理

更换制动分泵
• 注意:因制动分泵更换后,推杆长度会有所变化,故 必须检查刹车间隙自动调整臂的安装位置。 • 1 移去制动分泵上连接叉的开口销、插销,使之与刹 车间隙自动调整臂分离。 • 2 松开控制臂与定位支架相连接的固定螺母和螺栓。 • 3 更换制动分泵。 • 4 顺时针转动调整臂端部的六角螺母,使调整臂转入 分泵推杆U形叉内。直至调整臂上的孔与U形叉孔对正。 在圆柱销上涂上黄油,再将其轻松插入叉孔,锁上开 口销。(注意:调整臂上的孔与U形叉孔一定要自然 对正。) • 5 参照前后桥调整臂安装方法说明。
二、 前桥HALDEX刹车间隙自动调整臂的安装 B
3 .将控制臂沿控制臂上箭头示意方向推动,直至推不动为止。目的 是保证磨擦衬片和制动鼓之间的设定间隙。随后先将HALDEX卡 箍式定位支架安装在凸轮轴轴端外壳上,在定位支架上的螺母、 垫片最终紧固前,将控制臂通过定位支架的螺栓支柱,螺母,垫 片定位于定位支架上(详请参见图示),最后紧固定位支架于车 桥上(通过其上的两只螺母,紧固力矩至少为20nm)。控制臂与 定位支架的联接方式见图示。 4.用两只螺栓、垫片将调整臂固定在S凸轮轴上。沿凸轮轴轴向检查 调整臂在凸轮轴上轴向是否存在一定间隙,要求间隙值为0.5mm~ 2.0mm之间,实际值如大于或小于上述间隙值范围,应立即将调整 臂拆下,调整凸轮轴轴向定位尺寸以便符合上述要求。 5.用SW12的扳手顺时针方向(转动力矩小,无咔咔声)转动调整臂 的六角螺母,直至磨擦衬片与制动鼓按触,然后再逆时针方向转 动六角螺母3/4圈(转动力矩较大,会听到咔咔声),注意不能用 电动扳手或风动钻。 6.施加若干次制动,刹车间隙将自动调整至正常范围。调整功能可通 过六角螺母在刹车即将结束时顺时针方向的自动旋转观察到。至 此安装过程完毕。
自动调整臂工作原理

学习内容:1、 掌握汽车制动器自动调整臂装配图结构与零件装配关系2、 主要零件壳体结构与技术要求3、 结合所给参考资料写出所给汽车制动器自动调整臂工作原理与自 动调整的装配关系自动调整臂实际上就是一个开环的机械自动控制系统,其工作原理如图2-2所示。
上下移动(在壳体的带动下),在制动开始时,齿条与开口的上端接触,在制动过 程中,齿条移到开口的下端。
超量间隙的调整是在制动回位的过程中完成的。
回 位时,壳体如①方向转动,壳体带动齿条移到开口的上端,如存在超量间隙△, 壳体继续回位,齿条已不能移动,齿条驱动调整器转动调整器带动蜗杆。
z 方向 转动驱动蜗轮转动一永久的角度(当然凸轮轴亦转过同样的角度厶)而达到消除 超量间隙△,调节制动间隙到标准值△ XQo其工作原理如下图齿条可在开口内2-2自动调整臂的工作原理 控制盘固定在车轴上作为定位元件,其上的开口对应于标准的制动间隙值,⑷(b) w(1)制动间隙处于设计理想状态时。
制动时,制动分泵连接叉推动主臂1逆时针旋转,大蜗杆7推动大蜗轮9,大蜗轮9通过内花键3带动凸轮轴转动实现制动。
在臂体1逆时针转动时,因控制臂5为固定的,与其固定连接的大齿轮4 不动,小齿轮6将沿大齿轮4的节圆滚动,即小齿轮6也逆时针转动;经内爪键17的传动,上端锯齿轮11相应逆时针转动。
当制动间隙在理想状态内时,在上端锯齿轮11逆时针转动过程中,它将压缩顶簧13顺着下端锯齿轮12的锯齿斜而轴向移动,但不会跳齿。
因小蜗杆右端为一单向超越离合器,下端锯齿轮12与小蜗杆不会转动。
解除制动时,制动分泵连接叉推动主臂1顺时针旋转,大蜗杆7推动大蜗轮9,大蜗轮9通过内花键3带动凸轮轴转动解除制动,在臂体1顺时针转动时,小齿轮6将沿大齿轮4的节圆滚动,即小齿轮6也顺时针转动;经内爪键7的传动,上端锯齿轮11相应顺时针转动,同时在顶簧 13作用,顺着下端锯齿轮12的锯齿斜而做反向的轴向移动,其运动的角度和位移均与制动时相同,因血不做间隙调整。
自动调整臂原理图及安装调整方法
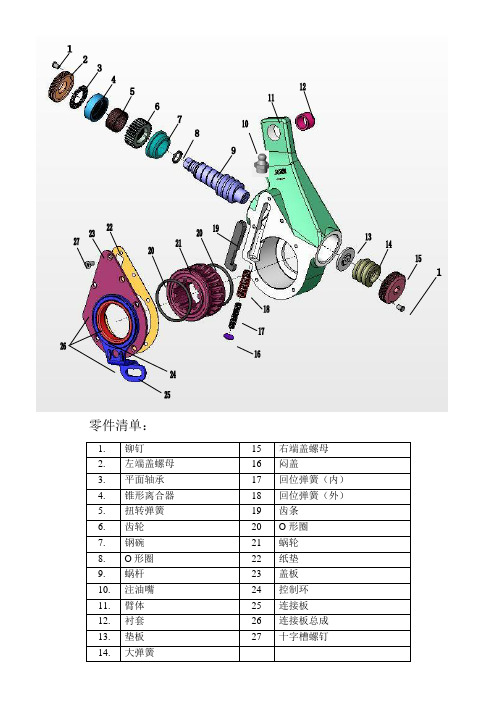
零件清单:1.铆钉15 右端盖螺母2.左端盖螺母16 闷盖3.平面轴承17 回位弹簧(内)4.锥形离合器18 回位弹簧(外)5.扭转弹簧19 齿条6.齿轮20 O形圈7.钢碗21 蜗轮8.O形圈22 纸垫9.蜗杆23 盖板10.注油嘴24 控制环11.臂体25 连接板12.衬套26 连接板总成1.起始位置连接板25被固定在支架上,齿条19与控制环24的槽口上端相接触。
槽口的宽度决定了刹车片与制动鼓之间的设定间隙值。
2.转过间隙角调整臂转过角A。
此时,齿条19向下运动与控制环24的槽口下端接触,制动蹄张开。
当存在超量间隙时,刹车片与制动鼓尚末接触。
3.转过超量间隙角B调整臂继续转动。
此时,齿条19已和控制环24的槽口下端接触(控制环与固定的控制臂被铆为一体),不能继续向下运动。
齿条驱动齿轮6旋转,单向离合器在这个方面可以相对自由转动转过角B后,凸轮轴带动制动蹄进一步张开,致使刹车片与制动鼓相接触。
4.转入弹性角C当调整臂继续转动时,由于刹车片与制动鼓已经相接触,作用在凸轮轴和蜗轮上的力矩迅速增加,蜗轮21作用于蜗杆9上的力(向右)随之增大,使得蜗杆压缩弹簧14并向右移动,从而导致蜗杆9与锥形离合器4分离。
5.转弹性角C调整臂继续转动时,齿条被控制环限制仍然不能向下运动而驱动齿轮转动。
这时由于锥形离合器4与蜗杆9处于分离状态,整个单向离合器总成一起转动。
6.向回转过弹性角C制动开始释放,调整臂向回转过角C。
在回位弹簧17和18的作用下,使得齿条向下紧帖控制环24的槽口下端。
此时,锥形离合器4与蜗杆9仍处于分离状态,齿条可以驱使单向离合器总成自由转动。
7.向回转入间隙角A随着刹车片作用于制动鼓上压力的释放,作用于凸轮轴和蜗轮的力矩消失,蜗轮21向右施加给蜗杆9的力也消失,弹簧14复原,推动蜗杆向左移动,使得蜗杆与锥形离合器4从新啮合。
8.向回转过间隙角A调整臂向回转过A。
齿条19向上运动,与控制环24的槽口的接触从下端变为上端。
气刹自动调整臂原理

气刹自动调整臂原理
嘿,朋友们!今天咱们要来聊聊气刹自动调整臂的原理,这可真是个超级有趣的东西呢!
你想想看啊,气刹自动调整臂就像是汽车刹车系统里的一个小魔法师!比如说,当你的车在路上跑的时候,刹车系统就如同一位忠诚的卫士,时刻守护着你的安全。
而气刹自动调整臂就是这个卫士手中的秘密武器!
它的工作原理其实并不难理解。
简单来说呢,它会根据刹车的使用情况自动调整刹车片和刹车鼓之间的间隙。
哎呀,这就好比你走路的时候,根据路况自动调整步伐的大小和快慢一样自然!
来,咱们具体说说看。
当你踩下刹车踏板,气刹就会发挥作用,这时候自动调整臂就开始忙碌起来啦!它会监测到刹车的动作,然后迅速做出反应,调整到最合适的位置,确保刹车效果达到最佳状态。
就像一个聪明的小精灵,能迅速察觉到危险并采取行动!
“嘿,那要是它出问题了咋办呀?”有人可能会这么问。
哈哈,这就是关键所在啦!如果气刹自动调整臂不能正常工作,那刹车效果可就大打折扣
了,就好像战士失去了锋利的宝剑一样危险!所以平时一定要好好保养和检查它哦!
那在实际生活中,大家可都要重视这个小小的气刹自动调整臂呀。
别小看它,它可是在关键时刻能救你一命的!
我觉得气刹自动调整臂真的太重要啦!它是我们行车安全的重要保障,我们一定要了解它、重视它,这样才能让我们的出行更加安心、更加安全!。
调整臂工作原理

调整臂工作原理调整臂是一种常见的机械装置,用于调整和控制机械系统中的运动部件。
它通常由一个或多个关节组成,可以在不同方向上进行旋转或移动,从而改变机械系统的工作状态。
调整臂的工作原理涉及到力学、动力学和控制理论等多个领域,下面将对其工作原理进行详细介绍。
首先,调整臂的工作原理与其结构密切相关。
一般而言,调整臂由支架、关节和执行器等部件组成。
支架是调整臂的主体框架,用于支撑和固定其他部件;关节是连接支架和执行器的部件,可以实现相对运动;执行器则是根据外部控制信号,对关节进行驱动和控制。
这些部件共同协作,实现调整臂的各种运动功能。
其次,调整臂的工作原理涉及到力学和动力学的知识。
在调整臂的运动过程中,各个部件之间会受到力的作用,这些力会影响调整臂的运动状态和稳定性。
同时,调整臂的运动还涉及到速度、加速度、惯性等动力学参数,这些参数会影响调整臂的响应速度和控制精度。
因此,了解力学和动力学知识对于理解调整臂的工作原理至关重要。
另外,调整臂的工作原理还与控制理论有密切关系。
在现代工业中,许多调整臂都是由电气或液压系统驱动的,因此需要进行精确的控制。
控制理论可以帮助我们设计合适的控制算法,实现对调整臂运动的精准控制。
同时,控制理论还可以帮助我们分析调整臂的稳定性和鲁棒性,从而确保调整臂在各种工况下都能够可靠工作。
总的来说,调整臂的工作原理涉及到多个学科领域的知识,包括结构设计、力学、动力学和控制理论等。
只有全面理解这些知识,才能够深入理解调整臂的工作原理,为实际应用提供技术支持。
在实际应用中,调整臂广泛应用于各种机械系统中,如工业生产线、机器人、汽车生产线等。
它可以帮助我们实现对机械系统的精确控制和调整,提高生产效率和产品质量。
因此,深入理解调整臂的工作原理对于提高机械系统的性能和可靠性具有重要意义。
综上所述,调整臂的工作原理涉及到结构设计、力学、动力学和控制理论等多个领域的知识。
只有全面理解这些知识,才能够深入理解调整臂的工作原理,并在实际应用中发挥其作用。
自动调整臂调节原理

9.在超量间隙角度B区内 反向转动调整臂,控制环 24槽口推动齿条19向下位 移到底端。此时,由于蜗 杆9与离合器4处于啮合状 况 , 齿 条 19 带 动 蜗 杆 9 旋 转,蜗杆9驱动蜗轮21和S 凸轮轴同时转动一个角度, 完成了一次间隙调整
10.反复1到9的制动与释 放动作,直到将制动鼓与 刹车片之间的间隙调整到 正常间隙A。
3.在超量间隙角B内旋 转调整臂,控制环24槽 口推动齿条19向上位移, 齿条19转动单向离合器 上的齿轮6。此时,齿 轮6相对离合器弹簧5和 离合器4转动,同时,S 凸轮推动刹车蹄片向外 张开,直致刹车片与制
动鼓接触。 `
4.由于刹车片与制 发生轴向位移,离 合器4与蜗杆19慢慢 分离。
7.由于制动力 的释放,S凸轮、 蜗杆9、蜗轮21 上的扭力下降, 止 推 弹簧 14 的 推动蜗杆9重新 与离合器啮合。
8.继续反向转 动调整臂进入到 正常间隙角A内。 由于蜗杆19与离 合器4啮合,回 位弹簧17、18的 弹力不足以转动 单向离合器,于 是,齿条19的齿 端与控制环24槽 口的接触点慢慢 由下缘移到上缘。
5.继续转动调整
臂,此时进入弹性
角度C。控制环24
槽口推动齿条19继
续向上位移,由于
离合器4与蜗杆19
已分离,齿条19就
驱动整个单向离合
器转动。
`
有超量间隙时的刹车释放 工作原理 6.在弹性角度C内反向转 动调整臂,由于离合器4 与蜗杆9已分离,齿条19 在回位弹簧17、18的作用 下向下位移,同时反向驱 动整个单向离合器转动。 此时,齿条19的齿端与控 制环24槽口下缘接触。
汽车制动间隙
自动调整臂工作
原理简介
起始位置
1.齿条19的齿端与
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
9.反向回转过超量间隙角B 调整臂继续反转动回到起始位置。 此时,齿条“19”已与固定的控制环 的槽口上端相接触,受其限制不能 继续向上移动。当调整臂反向回转 时,齿条驱动齿轮“6”转动,此 时单向离合器和锥齿离合器均处于 啮合状态,使得蜗杆“9”随齿轮 一起转动,蜗杆驱动蜗轮“21”,蜗 轮驱动凸轮轴,而凸轮轴的转动使 得超量间隙减小。
7.反向回转入间隙角A 随着作用于制动鼓上压力 的释放,作用于凸轮的力矩 消失,蜗轮“21”向右施加 给蜗杆“9” 力的消失,弹 簧“14”复原,推动蜗杆向 左移动,使得蜗杆与锥形离 合器“4”重新啮合。
8.反向回转过间隙角A 调整臂反向回转过角 “A”。齿条“19”向上运 动,与控制环“24”的槽口 的接触从下端变为上端。
自动调整臂工作原理
创造卓越的国际品牌
调整臂总成剖视图
产品爆炸图
结பைடு நூலகம்图
当制动器存在超量间隙“B” 制动时,调整臂的回转行程可划分 为三个部分:正常间隙角“A”、 超量间隙角“B”及弹性角 “C”。隆中自动调整臂能够自 动识别这三个过程,只对超量部 份间隙进行调整。
1.制动起始位置 当控制臂“25”被固定在安 装支架上时,齿条“19”与控 制环“24”的槽口上端相接触。 槽口的宽度决定了刹车片与制 动鼓之间的设定间隙。
5.转过弹性角“C” 调整臂继续转动时,齿条被控 制环限制仍然不能向下运动而驱 动齿轮转动。这时锥形离合器 “4”与蜗杆“9”处于分离状 态,整个单向离合器总成一起转 动(空转—未带动蜗杆)。
6.反向回转过弹性角C 制动开始释放时,调整臂反向 回转过角“C”。在回位弹簧 “17和18”的作用下,使得齿条 向下紧贴控制环的槽口下端。此 时,锥形离合器“4”与蜗杆 “9”仍处于分离状态,齿条可 以驱使单向离合器总成自由转动。
2.初始制动转间隙角“A”
当调整臂转过间隙角“A” 时,此时齿条“19”向下运动, 与控制环“24”的槽口下端接触, 制动蹄开始张开,如存有超量 间隙时,此时刹车片与制动鼓 未能接触。
3.制动时转过超量间隙角“B” 当调整臂继续转动时。齿条“19” 已和控制环“24”的槽口下端接合, 齿条无法继续向下移动。在控制环 的反作用力下(相对于调整臂柄部 力的方向)齿条驱动齿轮“6”旋 转,并转过过量间隙角“B” 。同 时凸轮轴进一步带动制动蹄张开, 此时刹车片与制动鼓相接触。
4.转入弹性角“C” 当调整臂继续转动时,由于刹车片与 制动鼓已经相接触,调整臂壳体作用在 凸轮轴和蜗轮上的两个反向力矩迅速增 大,蜗轮“21”作用在蜗杆“9”上的反 向力随之增大,使得蜗杆压缩止推弹簧 “14”并向右(向此图的右侧)移动,从 而导致蜗杆“9”的齿端与锥形离合器 “啮合齿面”“4”分离。