步进电机梯形加减速算法
梯形加减速算法在MCU控制步进电机中的应用研究
梯形加减速算法在MCU控制步进电机中的应用研究作者:***来源:《机电信息》2020年第18期摘要:为了实现单片机对步进电机的精准控制,通过研究梯形加减速运动数学模型分析电机机械运动特性,建立了速度与脉冲、加减速度的数学关系,在STM32单片机中实现了梯形加减速算法的转换。
经调试,步进电机在MCU控制下运行平滑稳定,响应灵敏,不存在失步、过冲现象。
关键词:梯形算法;数学模型;步进电机;MCU0 引言随着企业的转型升级,智能化设备备受企业青睞,由于步进电机无需反馈就能对位置和速度进行精准控制,故其在工业自动化设备中应用极为广泛。
但在一些速度变化较大、加减速频繁的设备中,步进电机时常发生失步、过冲等现象,导致控制失灵、精度不高等问题。
本文对上述问题进行研究,发现通过梯形加减速算法控制步进电机,具有运行稳定、响应灵敏的优点,不存在失步、过冲等现象。
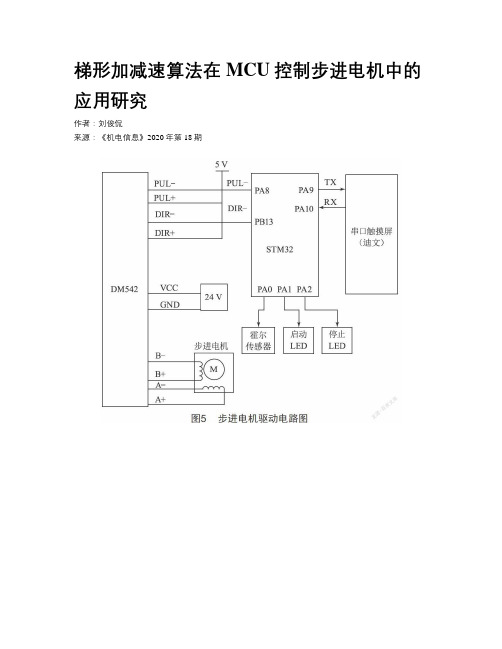
1 MCU控制步进电机硬件系统如图1所示,MCU控制步进电机硬件系统以STM32F103单片机为核心,硬件系统包含了四大部分:一是串口触摸屏,主要用于用户输入步进电机运行步数、加速度、减速度、最高运行速度等数据,并提供控制步进电机前进、后退和急停的按钮;二是步进电机驱动部分,该部分主要由四线制57H2P7842A4步进电机和DM542驱动器组成,用于驱动负载的滚珠丝杆滑台在直线导轨上按规定的速度稳定、平滑地往返运动;三是复位检测传感器,系统启动时根据传感器位置信号使滚珠丝杆滑台复位;四是电源部分,该电源主要为负载提供3.3 V、5 V、24 V 直流电压。
2 梯形加减速运动数学模型步进电机梯形加减速运动数学模型如图2所示,模型曲线以角速度ω、时间t分别为纵轴和横轴,曲线有恒加速、匀速和恒减速三个阶段,涉及最高速度SPD、电机运行步数L、加速度A和减速度D四个参数。
通过研究模型曲线分析电机角速度ω、加减速度?覣、脉冲信号周期δt、脉冲数n等参数的数学关系,使步进电机在MCU控制下按照梯形曲线做平滑稳定的机械运动,避免发生失步和过冲现象。
梯形加减速运动算法
梯形加减速运动算法一、梯形加速算法梯形加速算法是一种常见的加速算法,其基本思想是通过将速度变化曲线近似为梯形,从而简化速度控制过程。
该算法主要由以下几个步骤组成:1. 确定起始速度和最大速度。
根据实际需求,确定起始速度和最大速度,为梯形加速算法提供基本参数。
2. 计算梯形参数。
根据起始速度、最大速度和加速时间,计算出梯形的各个参数,包括梯形高度、梯形宽度和梯形角度等。
3. 生成速度曲线。
根据计算出的梯形参数,生成速度曲线,即梯形加减速运动曲线。
4. 输出控制信号。
将速度曲线转化为控制信号,控制电机或其他执行机构的运动。
二、梯形匀速运动算法梯形匀速运动算法是在梯形加速算法的基础上,通过将最大速度保持不变,从而实现匀速运动。
该算法主要由以下几个步骤组成:1. 确定最大速度。
根据实际需求,确定最大速度,为梯形匀速运动算法提供基本参数。
2. 生成速度曲线。
根据最大速度和匀速时间,生成速度曲线,即梯形加减速运动曲线。
3. 输出控制信号。
将速度曲线转化为控制信号,控制电机或其他执行机构的运动。
三、梯形减速算法梯形减速算法是一种常见的减速算法,其基本思想是通过将速度变化曲线近似为梯形,从而简化速度控制过程。
该算法主要由以下几个步骤组成:1. 确定起始速度和最大减速度。
根据实际需求,确定起始速度和最大减速度,为梯形减速算法提供基本参数。
2. 计算梯形参数。
根据起始速度、最大减速度和减速时间,计算出梯形的各个参数,包括梯形高度、梯形宽度和梯形角度等。
3. 生成速度曲线。
根据计算出的梯形参数,生成速度曲线,即梯形加减速运动曲线。
4. 输出控制信号。
将速度曲线转化为控制信号,控制电机或其他执行机构的运动。
四、运动规划算法运动规划算法是一种基于优化理论的运动规划方法,其主要思想是通过优化目标函数,获得最优的运动轨迹。
该算法主要由以下几个步骤组成:1. 确定初始位置和目标位置。
根据实际需求,确定初始位置和目标位置,为运动规划算法提供基本参数。
步进电机三轴联动的快速加减速算法研究

步进电机三轴联动的快速加减速算法研究摘要:加减速控制是数控系统的关键技术,对提高数控系统的精度及速度有重要的意义。
提出了一种步进电机三轴联动的快速加减速算法--动态查表法,该算法结合DDA 插补算法,可以用普通的单片机实现多种加减速曲线的运动控制,具有运算速度快、精度高等优点。
1 引言步进电机具有快速启停能力强、精度高、转速容易控制的特点。
但是,步进电动机应避免转动速率的突变,而且从停止到开始转动有一个较低的起动频率,随后才可以平缓地过渡到较高的转速。
相应地在步进电机制动时,也应该平缓过渡。
如果由于启动和停止控制不当,步进电机会出现启动时抖动和停止时过冲的现象,从面影响系统的控制精度[1][2][3]。
为避免这种情况的发生,要对步进电机进行加减速控制。
加减速控制是数控系统的关键技术,对提高数控系统的精度及速度有重要的意义。
加减速控制也得到了广泛的研究与应用。
目前国内外步进电机加减速控制曲线主要包括三种[4]:直线型加减速速度曲线(也称为梯形曲线)、指数型加减速曲线、S 型加减速曲线。
控制算法主要有查表法和插补迭代法。
查表法的原理是设置一张时间间隔表,表中的每一项都对应一个转速,时间间隔按一定的规律变化[1]。
插补迭代法的原理是根据前一步的基准点速度和加、减、匀速状态来确定当前步的基准点速度[4][5]。
这两种控制算法都有各自的适用范围,查表法适用于单轴的加减速控制,具有算法简单、快速的特点,但不能适用于多轴联动。
插补迭代算法适用于高精度的控制,算法复杂,对处理器的要求较高,一般需要用到DSP 等高档处理器[4]。
本文结合两种算法的优点,设计了一种“动态查表法”来实现三轴联动的快速加减速算法。
动态查表法即有查表法简单、快速的特点,又能够用一般的单片机来实现高精度的多轴联动加减速控制。
2 动态查表法根据线性插补原理,各插补轴的位移与速度比相等。
在加减速过程中,各插补轴的速度、加速度分别与合成的速度、加速度对应成比例[5]。
步进电机加减速控制

1 加减速控制算法1.1 加减速曲线本设计按照步进电机的动力学方程和矩频特性曲线推导出按指数曲线变化的升降速脉冲序列的分布规律,因为矩频特性是描述每一频率下的最大输出转矩,即在该频率下作为负载加给步进电机的最大转矩。
因此把矩频特性作为加速范围下可以达到(但不能超过)的最大输出转矩来拟订升降速脉冲序列的分布规律,就接近于最大转矩控制的最佳升降速规律。
这样能够使得频率增高时,保证输出最大的力矩,即能够对最大的力矩进行跟随,能充分的发挥步进电机的工作性能,使系统具有良好的动态特性。
由步进电机的动力学方程和矩频特性曲线,在忽略阻尼转矩的情况下,可推导出如下方程:式中,为转子转动惯量,K为假定输出转矩按直线变化时的斜率,τ为决定升速快慢的时间常数,在实际工作中由实验来确定。
fm为负载转矩下步进电机的最高连续运行频率,步进电机必须在低于该频率下运行才能保证不失步。
(1)式为步进电机的升速特性,由此方程可绘制出电机升速曲线。
(1)式表明驱动脉冲的频率f应随时间t作指数规律上升,这样就可以在较短的时间内使步进电机的转速上升至要求的运行速度。
鉴于大多数的步进电机的矩频特性都近似线性递减的,所以上述的控制规律为最佳。
1.2 加减速离散处理在本系统中,FPGA使用分频器的方式来控制步进电机的速度,升降速控制实际上是不断改变分频器初载值的大小。
指数曲线由于无法通过程序编制来实现,可以用阶梯曲线来逼近升速曲线,不一定每步都计算装载值。
如图l所示,纵坐标为频率,单位是步/秒,其实反映了转速的高低。
横坐标为时间,各段时间内走过的步数用N来表示,步数其实反映了行程。
图中标出理想升速曲线和实际升速曲线。
步进电机的升速过程可按以下步骤进行处理。
(1)若实际运行速度为fg,从(3.4)式中可算出升速时间为:(2)将升速段均匀地离散为n段即为阶梯升速的分档数,上升时间为tr,则每档速度保持时间为:程序执行过程中,对每档速度都要计算在这档速度应走的步数,然后以递减方式检查,即每走一步,每档步数减1。
步进电机的加减速控制
步进电机的加减速控制一、引言随着科学技术的发展和微电子控制技术的应用,步进电机作为一种可以精确控制的电机,广泛应用在高精密加工机床,微型机器人控制,航天卫星等高科技领域。
二、步进电机的原理步进电机是一种控制用的特种电机,它无法像传统电机那样直接通过输入交流或直流电流使其运行,而是需要输入脉冲电流来控制电机的转动,所以步进电机又称为脉冲电机。
其功能是将脉冲电信号变换为相应的角位移或直线位移,即给一个脉冲电信号,电机就转动一个角度或前进一步。
按励磁方式可以分为反应式、永磁式和混合式三种类型,本设计中选用的是反应式步进电机,其结构如图 1 所示。
这是一台四相反应式步进电机的典型结构。
共有4 套定子控制绕组,绕在径向相对的两个磁极上的一套绕组为一相,也就是说定子上两个相对的大齿就是一个相,电机按照A —B —C —D — A 的顺序不断接通和断开控制绕组,转子就会一步一步的连续转动。
其转速取决与各控制绕组通电和断电的频率,即输入的脉冲频率。
旋转的方向则取决与各控制绕组轮流通电的顺序。
三、步进电机的驱动控制步进电机不能直接接到直流或交流电源上工作,必须使用专门的步进电机驱动控制器。
步进电机和步进电机驱动器构成步进电机驱动系统。
步进电机驱动系统的性能,不仅取决于步进电机自身的性能,也取决于步进电机驱动器的优劣。
步进电机的驱动方式有很多种,包括单电压驱动、双电压驱动、斩波驱动、细分驱动、集成电路驱动和双极性驱动。
本设计选用的是恒频脉宽调制细分驱动控制方式,这是在斩波恒流驱动的基础上的进一步改进,既可以使细分后的步距角均匀一致,又可以避免复杂的计算。
四、恒频脉宽调制细分电路的设计1、脉冲分配的实现在步进电机的单片机控制中,控制信号由单片机产生。
它的通电换相顺序严格按照步进电机的工作方式进行。
通常我们把通电换相这一过程称为脉冲分配。
本设计中选用8713 脉冲分配器芯片来进行通电换相控制。
2、系统控制电路设计步进电机控制系统主电路设计如图 2 所示。
步进电机梯形加减速实验实验原理

步进电机梯形加减速实验实验原理步进电机是一种将电脉冲信号转换为角位移的电动机。
它以其精度高、定位准确和响应速度快等特点,在自动化控制系统中得到了广泛应用。
其中,步进电机梯形加减速实验是一种用于研究步进电机运动特性的实验方法。
步进电机梯形加减速实验的原理是通过调节电脉冲信号的频率和相序来控制步进电机的运动,实现不同速度下的加减速运动。
具体步骤如下:1.实验仪器准备:实验所需仪器包括步进电机、电流驱动器、控制器和计时仪等。
其中,电流驱动器用于提供电流给步进电机,控制器用于控制电流驱动器的工作状态,计时仪则用于测量步进电机的运动时间。
2.实验电路搭建:将电脉冲发生器的输出连接到控制器的输入口,控制器的输出口连接到电流驱动器的控制端口,电流驱动器的输出端口连接到步进电机的相线上。
同时,将电流驱动器的电源和步进电机的电源连接,确保实验电路可正常工作。
3.实验参数设置:根据实验要求,设置控制器的电流值、步进角度和加速度等参数。
其中,电流值决定步进电机的扭矩大小,步进角度决定电机每次接收到电脉冲后转动的角度,加速度则影响电机的加减速过程。
4.实验步骤控制:通过控制器调节电脉冲信号的频率和相序,可以实现对步进电机的控制。
通过改变电脉冲的频率和相序,可以控制步进电机的转动速度和运动方式。
在加减速实验中,可以通过逐步增加电脉冲的频率和相序,来实现步进电机的加速过程;通过逐步减小电脉冲的频率和相序,则可以实现步进电机的减速过程。
5.运动时间测量:通过将计时仪连接到步进电机上,可以测量电机在不同速度下的运动时间。
通过测量多次,可以得到步进电机的平均运动时间,并计算出电机的平均速度。
步进电机梯形加减速实验原理简单来说就是通过调节电脉冲信号的频率和相序来控制步进电机的转动速度和运动方式,从而实现不同速度下的加减速运动。
在实验中通过设置电流值、步进角度和加速度等参数,可以控制步进电机的性能。
通过测量电机的运动时间,可以得到步进电机的平均速度,并探究步进电机的运动特性。
看不懂 正点原子步进电机 梯形加减速文档
一、概述近年来,随着工业自动化的发展,步进电机作为一种新型驱动器在生产线上得到了广泛应用。
而在步进电机中,正点原子公司的原子步进电机以其稳定性和高效性备受青睐。
然而,对于初学者来说,梯形加减速是一个相对复杂的概念,很多人在使用原子步进电机时会遇到看不懂的问题。
本文将通过对正点原子步进电机梯形加减速文档的解读,帮助读者更好地理解梯形加减速的原理和应用。
二、梯形加减速的概念1. 梯形加减速是指在步进电机运动过程中,根据设定的加速度和速度限制,以一定的步进方式进行加速和减速。
通过合理设置梯形加减速参数,可以使步进电机在运动过程中更加平稳稳定,提高其运行效率和精度。
2. 在正点原子步进电机中,梯形加减速是通过在代码中设置加速度和速度限制来实现的。
用户可以根据实际需要,自行调整这些参数以达到最佳的运动效果。
三、梯形加减速文档的解读1. 了解步进电机的基本参数:在梯形加减速文档中,首先需要了解步进电机的基本参数,包括步距角、细分数、电流等。
这些参数将直接影响到梯形加减速的设置,因此需要在使用前对步进电机的基本参数有一个清楚的了解。
2. 设置加速度和速度限制:在正点原子步进电机的梯形加减速文档中,会详细介绍如何设置加速度和速度限制。
用户可以根据实际需要,灵活地调整这些参数,以满足不同的运动需求。
3. 理解梯形加减速的工作原理:梯形加减速是通过不断改变步进电机的速度和加速度来实现的。
在文档中,会对梯形加减速的工作原理进行详细的解释,帮助用户更好地理解其运作机制。
4. 实际案例分析:为了帮助用户更好地理解梯形加减速的应用,文档中通常会提供一些实际的案例分析,展示不同参数设置下步进电机的运动效果,这对于初学者来说非常有帮助。
四、梯形加减速的应用场景1. 制造业自动化:在制造业中,步进电机通常被应用于自动化生产线上,用于控制各种机械设备的运动。
梯形加减速可以有效地提高生产效率和产品质量。
2. 3D打印:在3D打印领域,步进电机也扮演着重要的角色。
步进电机加减速曲线的算法研究

步进电机加减速曲线的算法研究崔洁;杨凯;肖雅静;颜向乙【摘要】阐述了加减速算法在步进电机控制系统中发挥的重要作用,分析了步进电机的梯形曲线、指数曲线和S 形曲线等常用曲线加减速算法,介绍了一种能满足更高精度和速度平滑性的三角曲线加减速算法,最后总结了各算法的不同特性及具体应用场合。
%T his paper describes that the acceleration and deceleration algorithm plays an im portant role in stepper m otor control system . T he com m only used acceleration and deceleration algorithm s are com paratively analyzed,including trapezoidal curve,exponential curve and S-curve. It introduces a triangular curve acceleration and deceleration algorithm that can m eet m ore precise and speed sm oothness stepper. Finally,the different characteristics and specific applications of each m ethod are sum m arized.【期刊名称】《电子工业专用设备》【年(卷),期】2013(000)008【总页数】5页(P45-49)【关键词】步进电机;加减速算法;三角曲线【作者】崔洁;杨凯;肖雅静;颜向乙【作者单位】中国电子科技集团公司第四十五研究所,北京100176;中国电子科技集团公司第四十五研究所,北京100176;中国电子科技集团公司第四十五研究所,北京100176;中国电子科技集团公司第四十五研究所,北京100176【正文语种】中文【中图分类】TM301.3步进电机作为数字控制系统完成数模转化的执行元件,功能是把电脉冲信号变换为相应角位移或直线位移。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
步进电机梯形加减速算法
步进电机梯形加减速算法,是指在步进电机控制中,通过梯形加减速算法实现步进电机从静止到达目标位置,并且达到平稳加速和减速的目的。
具体的算法步骤如下:
1. 设置加速度值、减速度值、最大速度值以及目标位置。
2. 初始化步进电机的速度为0。
3. 计算步进电机加速度的时间常数,即在单位时间内速度增加的大小。
4. 根据加速度时间常数计算加速步数,即从0速度加速到最大速度所需要的步数。
5. 根据加速步数和加速度值计算出加速段每一步的速度值。
6. 将电机速度从0开始逐步增加,直至达到最大速度。
7. 当电机速度达到最大速度后,继续保持最大速度运动到距离目标位置一定的距离。
8. 计算减速度的时间常数,即在单位时间内速度减小的大小。
9. 根据减速度时间常数计算减速步数,即从最大速度减速到0速度所需要的步数。
10. 根据减速步数和减速度值计算出减速段每一步的速度值。
11. 逐步减小电机速度,直至达到0速度。
12. 完成以上步骤后,步进电机达到目标位置。
这样通过梯形加减速算法,可以保证步进电机在加速和减速过程中平稳运动,避免了突变或者震动,提高了步进电机的运动精度和稳定性。