BUCK电路闭环控制系统的MATLAB仿真..
电力电子课程设计-BUCK电路闭环PID控制系统的MATLAB仿真
电力电子课程设计-BUCK电路闭环PID控制系统的MATLAB仿真CHANGZHOU INSTITUTE OF TECHNOLOGY课程设计说明书课程设计名称:电力电子题目:BUCK电路闭环PID控制系统的MATLAB仿真—15V/5V二级学院(直属学部): 电子信息与电气工程学院专业:电气工程及其自动化班级:07电单学生姓名: 学号:指导教师姓名: 职称:讲师2011 年 1 月电力电子课程设计任务书二级学院(直属学部):电子信息与电气工程学院专业:电气工程及其自动化班级:学生姓名指导教师韩霞职称讲师课题名称 BUCK电路闭环PID控制系统的MATLAB仿真-15V/5V1、根据设计要求计算滤波电感和滤波电容的参数值,设计PID补偿网络2、采用MATLAB中simulink中的simpowersystems模型库搭建闭环降压式变换器的仿真模型3、观察系统在额定负载以及突加、突卸80%额定负载时的输出电压和负载电课流的波形4、撰写课程设计说明书,要求包括:题一、封面二、目录工三、正文1、降压变换器的基本原理作2、BUCK变换器主电路参数设计2.1设计内容及要求内 2.2主电路设计(占空比、滤波电感、滤波电容的设计)3、BUCK变换器闭环PID控制的参数设计容 3.1主电路传函分析3.2补偿环节的设计4、BUCK变换器闭环系统的仿真4.1仿真参数及过程描述4.2仿真模型图及仿真结果5、总结(含心得体会)6、参考文献(不少于6篇)21、输入直流电压(V):15V IN2、输出电压(Vo):5V3、输出电流(I):10A N指标4、输出电压纹波峰-峰值 Vpp?50mV)5、锯齿波幅值Um=1.5V 目标6、开关频率(fs):100kHZ )要7、采样网络传函H(s)=0.3 求8、BUCK主电路二极管的通态压降V=0.5V,电感中的电阻压降V=0.1V,开DL关管导通压降V=0.5V,滤波电容C与电解电容R的乘积为75uΩ*F ONC第1天阅读课程设计指导书,熟悉设计要求和设计方法第2天根据设计原理计算相关主要元件参数以及完成PID系统的设计进第3天熟悉MATLAB仿真软件的使用,构建系统仿真模型程安第4天仿真调试,记录要求测量波形排第5天撰写课程设计说明书1、电力电子课程设计任务书本院编2、电力电子课程设计指导书本院编3、王创社,乐开端等,开关电源两种控制模式的分析与比较,电力电子技术,1998,3,78一81; 主4、徐辅东,电流型控制开关变换器的研究与优化,西南交通大学硕士论文,要2000年4月。
BUCK电路的PID控制设计及仿真

BUCK电路的PID控制设计及仿真BUCK电路的PID控制设计⼀、实验⽬的DC/DC 变换器可将不可控的直流输⼊变为可控的直流输出,⼴泛应⽤于可调直流开关电源及直流电机驱动中. Buck 变换器是DC/DC 变换器中最具代表性的拓扑结构之⼀.在⼯程实际中, Buck变换器的控制⽅式可以开环和闭环来实现。
其中闭环控制⽅式⼜可分为PI校正,PID控制,fuzzy控制等⽅式。
本⽂⾸先会建⽴Buck 变换器的模型,然后会分别进⾏开环、PI控制器校正,PID控制器校正,并在MATLAB/SIMULINK上进⾏仿真,最后对得出的结果进⾏⽐较。
⼆、设计内容及要求U):24V( 20%)1、输⼊电压(iU):12V(1%稳定度)2、输出电压(oI):1A3、额定电流(oV≤70mV4、输出电压纹波峰-峰值ppV≤150mV 6、开关5、满载与半载之间的切换时,输出电压纹波峰-峰值pp频率(f):⽆要求,本设计设定为20kHz三、Buck 主拓扑电路3.1开环Buck 电路图图(1)开环Buck 电路3.2 参数计算与选择(1)占空⽐ 50%o i U D U == (2)滤波电感滤波电感的选择与负载电流的变化范围及希望的⼯作状态有关,假设电路要求⼯作在电感电流连续⼯作状态,则临界电感(1)2f o s oD U L I -= 根据公式代⼊计算可得:-4s (1)(10.5)*12 1.5*102f 2*20000o o U D L H I --===此时L 值为电感电流连续与否的临界值,实际电感值可选为(2~3)倍的临界电感。
这⾥L 取4*104H 。
(3)滤波电容电容的容量,会影响输出纹波电压和超调量的⼤⼩。
在开关关断时为负载供电和减⼩输出电压的纹波,滤波电容C 的选择直接关系开关稳压电源输出中纹波电压分量o U ⼤⼩。
滤波电容C2(1)8o o U D C U Lf-= 根据纹波要求代⼊计算-42-442(1)12*0.5==1.79*1088*0.07*1.5*10*(2*10)o o U D C U Lf -= F 这⾥电容C 取7.5*104F 。
Buck电路的闭环设计及仿真分析

Buck电路的闭环设计及仿真分析一、本文概述随着电力电子技术的飞速发展,电源转换技术已成为现代电子设备不可或缺的一部分。
其中,Buck电路作为一种基本的直流-直流(DC-DC)转换器,因其结构简单、效率高、调节范围宽等优点,在电子设备中得到了广泛应用。
然而,为了确保Buck电路在各种环境和负载条件下的稳定性和高效性,闭环设计显得尤为重要。
本文旨在探讨Buck电路的闭环设计方法,并通过仿真分析验证设计的有效性。
文章首先简要介绍了Buck电路的基本原理和应用背景,然后重点阐述了闭环设计的重要性及常用方法。
在闭环设计部分,文章详细分析了反馈网络的选取、控制策略的制定以及功率级和控制级的协同工作等问题。
同时,结合具体的设计实例,阐述了闭环设计在实际应用中的具体实现过程。
为了验证设计的有效性,文章采用了仿真分析的方法。
通过搭建基于MATLAB/Simulink的仿真模型,对设计的Buck闭环电路进行了全面的仿真分析。
仿真结果证明了闭环设计的有效性,同时也为实际电路的制作和调试提供了重要参考。
文章对闭环设计的Buck电路进行了总结,并指出了未来研究方向和潜在的应用前景。
通过本文的研究,旨在为从事电源转换技术研究和应用的工程师和学者提供有益的参考和启示。
二、Buck电路的基本原理Buck电路,也称为降压转换器,是一种基本的直流-直流(DC-DC)转换电路,其主要功能是将较高的直流电压降低到所需的较低直流电压。
其名称来源于电路中开关元件(如MOSFET或晶体管)的操作,类似于"bucking"(减少或抑制)输入电压。
Buck电路的基本构成包括一个开关(通常是MOSFET),一个电感(或称为线圈),一个二极管(也称为整流器或续流二极管),以及一个输出电容器。
在开关打开时,电流通过电感从输入源流向输出,此时电感储存能量。
当开关关闭时,电感释放其储存的能量,通过二极管向输出电容器和负载供电。
Buck电路的工作原理基于电感的电压-电流关系。
Buck电路设计与MATLAB仿真

Buck电路设计与MATLAB仿真LT利用simpowersystems中的模块建立所设计降压变换器的仿真电路。
输入电压为20V的直流电压源,开关管选MOSFET模块(参数默认),用Pulse Generator模块产生脉冲驱动开关管。
分别做两种开关频率下的仿真。
(1)使用理论计算的占空比(D=0.25),记录直流电压波形,计算稳态直流电压值,计算稳态直流纹波电压,并与理论公式比较,验证设计指标。
4、仿真过程::A.建立模型:建立仿真模型如下如所示:B. 记录数据:仿真算法选择ode23tb,最大步长为0.1s,占空比D=0.25进行仿真,记录数据如下表所示:开关频率f s(K Hz) 电感L(mH)电容C(μF)输出电压稳态值V o(V)输出电压纹波值ΔV o(V)电感电流波动值ΔI o(A)10 0.375500 4.736 0.0267 1 0.45 417 4.339 0.0275 0.875 0.1875500 6.435 0.0510 1.850 0.075100 4.745 0.0197 1.0140.09 83.3 4.396 0.0224 0.875与理论值对比开关频率f s(K Hz) 电感L(mH)电容C(μF)输出电压稳态值V o(V)输出电压纹波值ΔV o(V)电感电流波动值ΔI o(A)100.375500 5 0.025 1 0.45 417 5 0.025 0.833 0.1875 5005 0.025 2 500.075 100 5 0.025 1 0.09 83.3 50.0250.833C .仿真过程:当f s =10KHz,L=0.375mH C=500μF , 占空比D=0.25,电流连续的临界状态时,记录稳态直流电压值V o =4.736V ,稳态直流电压理论值5V计算稳态直流纹波电压的理论值2(1D)0.025V8s o o T V V CL-∆==,通过图中得到直流纹波电压为0.0267V当fs=10KHz,L=0.375mH, C=500μF,占空比D=0.25,电流连续的临界状态时,由(1)o SLV D T IL-∆=,得电感电流波动理论值是1A ,由图像得到电感电流波动值是1A ,与理论计算相符合Time/sP u l s e /VSwitch (fs=10KHz,L=0.375mH,C=500uF)Time/sI L /VInductor Current(fs=10KHz,L=0.375mH,C=500uF)Time/sU o /VUo (fs=10KHz,L=0.375mH,C=500uF)Figure-1 fs=10K Hz,L=0.375mH, C=500μF,占空比D=0.25,电流连续的临界状态取1.2倍临界电感值时,输出电压稳态值是4.399V ,理论值是5V ,纹波电压理论值0.025V记录波形测得纹波电压为0.0275V 电感电流波动理论值为0.833A ,由图像得到电感电流波动值是0.875ATime/sP u l s e /VPulse (fs=10KHz,L=0.45mH,C=417uF)Time/sI L /AInductor Current(fs=10KHz,L=0.45mH,C=417uF)取1.2倍电感值时0.1970.19750.1980.19850.1990.19950.20.20050.2010.2015Time/sU o /VUo (fs=10KHz,L=0.45mH,C=417uF)f s =50KHz,L=0.075mH, C=100μF, 占空比D=0.25,电流连续的临界状态时,记录稳态直流电压值V o =4.745V ,理论值是5V ,稳态直流纹波电压理论值0.025V ,由输出电压波形得到实际值为0.0197V电感电流波动理论值为1A ,测量值为1.014AFigure-2取1.2倍电感Time/sP u l s e /VPulse (fs=50KHz,L=0.075mH,C=100uF)Time/sI L /AInductor Current(fs=50KHz,L=0.075mH,C=100uF)x 10-3Time/sU o /VUo (fs=50KHz,L=0.075mH,C=100uF)Figure-3 f s =50KHz,L=0.075mH, C=100μF,占空比D=0.25,电流连续的临界状态取 1.2倍临界电感时,输出电压平均值为4.396V,理论值是5V,纹波电压理论值为0.025V,实际为0.0224V电感电流波动理论值为0.833A,实际值为0.875ATime/sP u l s e /VPulse (fs=50KHz,L=0.09mH,C=83.3uF)Time/sI L /AIductor Current(fs=50KHz,L=0.09mH,C=83.3uF)4.524.54 4.564.58 4.6 4.62 4.64x 10-3Time/sU o /VUo (fs=50KHz,L=0.09mH,C=83.3uF)Figure-4 取1.2倍电感时(2)画出电感电流波形,计算电流波动值并与理论公式对比记录数据如下表 开关频率f s (K Hz) 电感L(m H)电容C(μF)电感电流波动值ΔI o (A) 电感电流波动实际值ΔI o (A)100.375500 110.45 417 0.833 0.875 0.1875 500 2 1.8 500.07510011.014 0.09 83.3 0.8330.8750.10880.10890.1090.10910.10920.10930.10940.1095-1-0.50.511.52Time/sP u l s e /VSwitch (fs=10KHz,L=0.375mH,C=500uF)Time/sI L /VInductor Current(fs=10KHz,L=0.375mH,C=500uF)Figure-5 fs=10KHz,L=0.375mH, C=500μF,占空比D=0.25,电流连续的临界状态0.0250.02550.026-1-0.500.511.52Time/sP u l s e /VPulse (fs=10KHz,L=0.45mH,C=417uF)Time/sI L /AInductor Current(fs=10KHz,L=0.45mH,C=417uF)Figure-6 fs=10KH z,L=0.45mH, C=417μF,占空比D=0.250.02480.02490.025-1-0.500.51Time/sP u l s e /VTime/sI L /AInductor Current(fs=50KHz,L=0.075mH,C=100uF)Figure-7 f s =50KHz,L=0.075mH, C=100μF,占空比D=0.25,电流连续的临界状态0.02480.02490.025-1-0.500.511.52Time/sP u l s e /VPulse (fs=50KHz,L=0.09mH,C=83.3uF)Time/sI L /AIductor Current(fs=50KHz,L=0.09mH,C=83.3uF)Figure-8 f s =50KHz,L=0.09mH, C=83.3μF,占空比D=0.25(3)修改占空比,观察直流电压值的变化。
Buck电路的设计与仿真闭环设计及仿真

v s V s v ˆ s ; d D d ˆ ; d ' D ' d ˆ ; x X x ˆ ; y Y y ˆ
dxˆ dt
Axˆbvˆs
[(A1
A2)X
(b1
b2)Vs]dˆ
(A1 A2)dˆxˆ(b1 b2)dˆvˆs
x ˆ(s)(sIA)1bv ˆs(s)(sIA)1[(A 1A 2)X(b1b2)Vs]d ˆ(s) y ˆ(s)CT(sIA)1bv ˆs(s) C (T b(1s Ib 2)A V )s ]1[ (A (C 11 T A 2 C )2 X T)X d ˆ(s)
稳态和低频小信号等效电路模型
Δ(s S )2ω Q0Sω02
QD' ω0
L
DR ' L
1 RD l C' RcC
Q1
1
ω1
1
L D'2 Re
q
RcC
ω0
D' LC
ω1
D' LC
Req Rc
ωZ
1 RcC
ωa
(D')2 L
RL
Req(DRl)'2 DD'Rc
变换器控制到输出的传递函数
v d ˆˆ0((s s ))(V DI)2'(1 (s sω /R 0 cC )2 )s (ω (1 /0 D Q s)2 'L R 1L)
fz 1/(2 R2C1)
2.5 43
3
36
4
28
设计步骤
6. 验证与调整:时域仿真与实验验证?。 7. 结论 8. 补偿器在低频处有一个极点,通过提高误差放大器的开环增益改善输出调节性能,并降低低
MatlabBuck电路的仿真
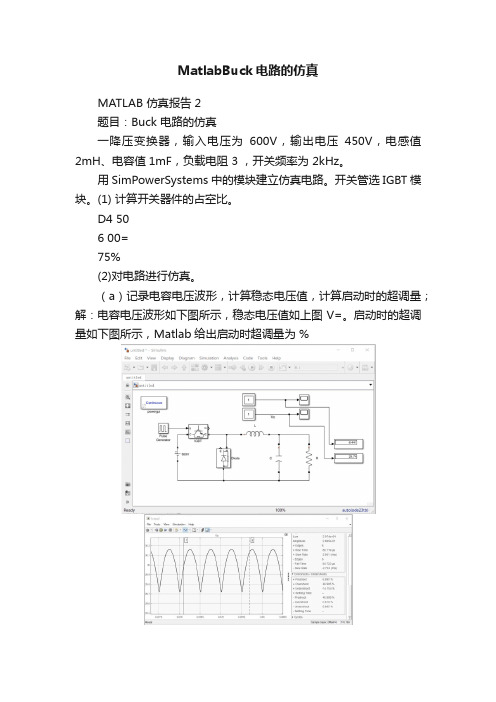
MatlabBuck电路的仿真MATLAB 仿真报告 2题目:Buck 电路的仿真一降压变换器,输入电压为600V,输出电压450V,电感值2mH、电容值1mF,负载电阻 3 ,开关频率为 2kHz。
用 SimPowerSystems 中的模块建立仿真电路。
开关管选 IGBT 模块。
(1) 计算开关器件的占空比。
D4 506 00=75%(2)对电路进行仿真。
(a)记录电容电压波形,计算稳态电压值,计算启动时的超调量;解:电容电压波形如下图所示,稳态电压值如上图 V=。
启动时的超调量如下图所示,Matlab给出启动时超调量为 %b)记录电感电流波形,计算稳态电流平均值,记录启动时的电流瞬时峰值;由图 1可以得出,稳态电流平均值为 I=,启动时电流瞬时峰值为.c)测量纹波电压和纹波电流;纹波电压波形如图 1,纹波电流波形如图 2。
图 1中电压最大值 Umax = ;电压最小值为 Umin = .图 2中电流最大值 Imax = ;电流最小值 Imin = .d)用理论分析上述结果。
在开关管打开的时候,电压加在电感两端给电感充电,在开关管闭合的时候,电感两端放电,被电容吸收,无功功率在电路中传输,造成了 V ripple以及 I ripple,导致纹波的产生。
(3) 将电感值修改为。
比较开关管分别选择为IGBT 和IGBT/Diode 时,波形有什么差别,并解释原因。
电感减少以后,将 IGBT换成 IGBT/Diode,电路的波形由原来的CCM工作在了DCM,电路超调量减小,稳定性上升,原因是 IGBT/Diode在 CE 点之间接入一个二极管,似的电路的电流电压被钳制在一个稳定值,电路启动时,不会拥有过大的超调量,电路的稳定性上升。
(4) 以(2)中的仿真为基础,不改变主电路的拓扑和参数,试通过控制手段,降低电路启动时电压电流的超调量。
在电路中加入一个串联校正控制器,电路的超调量有着明显的下降。
《MATLAB工程应用》---升降压(Buck-Boost)变换器仿真二

《MATLAB工程应用》升降压(Buck-Boost)变换器仿真一、选题背景Buck-Boost变换器在目前的各类计算机等各类智能电子设备中广泛应用,其优点在于效率高,可以输出大电流,且静态电流小。
其高效节能的优点也带来了很大的收益,随着科技在进步,变换器技术也在进步。
二、原理分析Buck-Boost变换器成为升压降压变换器,是一种输出电压既可以低于输入电压也可以高于输入电压的单管不隔离直流变换器,但其输出电压的极性与输入电压相反。
其可看作是Buck变换器与Boost变换器串联而成。
Buck-Boost型开关电源以其电路结构简洁,输入电压范围宽,可升降压,输入输出电压极性相反,被广泛应用于中小功率DC/DC变换场合。
电感影响输出纹波大小,电压的调整率。
电容起到滤波的作用,可根据输出脉动电压峰峰值来确定。
三、过程论述先在Simulink Library Browser中找到示波器scope,并设置为6个通道。
接着设置DC直流电源,设置电压为20V。
在Power electronics中找到Mosfet 以及Diode参数不动。
其次找出R、L、C并将R设为10Ω,L设为133e-6H,C 设为1.67e-3F。
找到Pulse Generator及Multimeter将其与示波器连接。
最后找出powergui放入连线图,连线如图一。
四、结果分析仿真时间为0.1s,连线图如图一所示,波形图如图二所示。
图1 设计连线图图二波形图图三L赋值图四C赋值图五R赋值五、课程设计总结通过这次课程设计,我学会了如何利用matlab实现各种实验仿真,熟练学会了升压降压变换器的原理,对我的专业知识有了很大提升。
在设计中,对RLC 的值计算算是卡的比较久的但还是解决了。
参考文献[1]周建兴.MATLAB从入门到精通.北京:人民邮电出版社,2008 [2]龚纯,王正林.MA TLAB最优化计算.北京:电子工业出版社, 2009.。
基于MATLAB的并联Buck_均流仿真
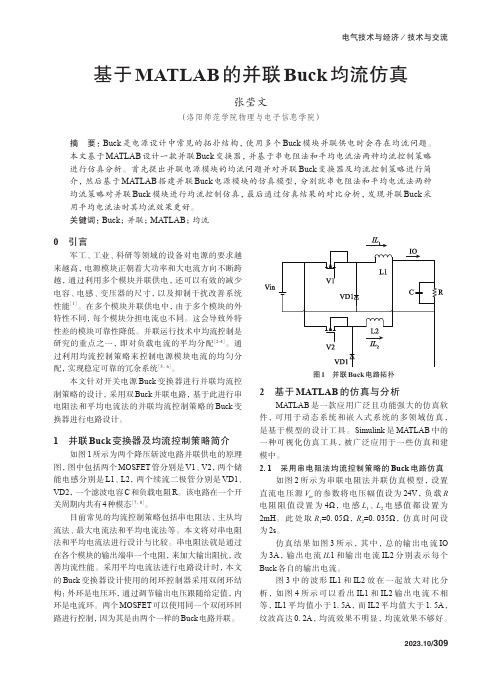
基于MATLAB的并联Buck均流仿真张莹文(洛阳师范学院物理与电子信息学院)摘 要: Buck是电源设计中常见的拓扑结构,使用多个Buck模块并联供电时会存在均流问题。
本文基于MATLAB设计一款并联Buck变换器,并基于串电阻法和平均电流法两种均流控制策略进行仿真分析。
首先提出并联电源模块的均流问题并对并联Buck变换器及均流控制策略进行简介,然后基于MATLAB搭建并联Buck电源模块的仿真模型,分别就串电阻法和平均电流法两种均流策略对并联Buck模块进行均流控制仿真,最后通过仿真结果的对比分析,发现并联Buck采用平均电流法时其均流效果更好。
关键词: Buck;并联; MATLAB;均流0 引言军工、工业、科研等领域的设备对电源的要求越来越高,电源模块正朝着大功率和大电流方向不断跨越,通过利用多个模块并联供电,还可以有效的减少电容、电感、变压器的尺寸,以及抑制干扰改善系统性能[1]。
在多个模块并联供电中,由于多个模块的外特性不同,每个模块分担电流也不同。
这会导致外特性差的模块可靠性降低。
并联运行技术中均流控制是研究的重点之一,即对负载电流的平均分配[2-4]。
通过利用均流控制策略来控制电源模块电流的均匀分配,实现稳定可靠的冗余系统[5, 6]。
本文针对开关电源Buck变换器进行并联均流控制策略的设计,采用双Buck并联电路,基于此进行串电阻法和平均电流法的并联均流控制策略的Buck变换器进行电路设计。
1 并联Buck变换器及均流控制策略简介如图1所示为两个降压斩波电路并联供电的原理图,图中包括两个MOSFET管分别是V1、 V2,两个储能电感分别是L1、 L2,两个续流二极管分别是VD1、VD2,一个滤波电容C和负载电阻R。
该电路在一个开关周期内共有4种模态[7, 8]。
目前常见的均流控制策略包括串电阻法、主从均流法、最大电流法和平均电流法等。
本文将对串电阻法和平均电流法进行设计与比较。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
BUCK 电路闭环PID 控制系统的MATLAB 仿真一、课题简介BUCK 电路是一种降压斩波器,降压变换器输出电压平均值Uo 总是小于输入电压U i 。
通常电感中的电流是否连续,取决于开关频率、滤波电感L 和电容C 的数值。
简单的BUCK 电路输出的电压不稳定,会受到负载和外部的干扰,当加入PID 控制器,实现闭环控制。
可通过采样环节得到PWM 调制波,再与基准电压进行比较,通过PID 控制器得到反馈信号,与三角波进行比较,得到调制后的开关波形,将其作为开关信号,从而实现BUCK 电路闭环PID 控制系统。
二、BUCK 变换器主电路参数设计2.1设计及内容及要求1、 输入直流电压(VIN):15V2、 输出电压(VO):5V3、 输出电流(IN):10A4、 输出电压纹波峰-峰值 Vpp ≤50mV5、 锯齿波幅值Um=1.5V6、开关频率(fs):100kHz7、采样网络传函H(s)=0.38、BUCK 主电路二极管的通态压降VD=0.5V ,电感中的电阻压降VL=0.1V ,开关管导通压降 VON=0.5V,滤波电容C 与电解电容RC 的乘积为F *Ωμ752.2主电路设计根据以上的对课题的分析设计主电路如下:图2-1 主电路图1、滤波电容的设计因为输出纹波电压只与电容的容量以及ESR 有关,rr rrC L N0.2V V R i I ==∆ (1)电解电容生产厂商很少给出ESR ,但C 与R C 的乘积趋于常数,约为50~80μ*ΩF [3]。
在本课题中取为75μΩ*F ,由式(1)可得R C =25mΩ,C =3000μF 。
2、滤波电感设计开关管闭合与导通状态的基尔霍夫电压方程分别如式(2)、(3)所示:INO L ON L ON /V V V V L i T ---=∆(2)O L D L OFF /V V V L i T ++=∆ (3) off 1/on s T T f += (4)由上得:Lin o L DonV V V V L T i ---=∆ (5)假设二极管的通态压降V D =0.5V ,电感中的电阻压降V L =0.1V ,开关管导通压降V ON =0.5V 。
利用ON OFF S 1T T f +=,可得T ON =3.73μS ,将此值回代式(5),可得L =17.5μH3、占空比计算根据:onT D T=(6) 由上得:ON OFF S 1T T f +=,可得T ON =3.73μS ,则D=0.373三、BUCK 变换器PID 控制的参数设计PID 控制是根据偏差的比例P)、积分I)、微分D)进行控制,是控制系统中应用最为广泛的一种控制规律。
通过调整比例、积分和微分三项参数,使得大多数工业控制系统获得良好的闭环控制性能。
PID 控制的本质是一个二阶线性控制器,其优点:1、技术纯熟;2、易被人们熟悉和掌握;3、不需要建立数学模型;4、控制效果好;5、消除系统稳定误差。
3.1主电路传递函数分析图3-1 主电路()211IN C vdV sCR G L s s LCR+=++ (1)558215(17.510)1 3.510 5.2510vd S G S S ---+⨯=+⨯+⨯ (2)原始回路增益函数0G 为:()211()()()()()1IN C O m vd m V sCR G s G s H s G s H s L V s s LCR+=••=••++ (3) 带入数据得:530582582115(17.510)30.225100.3 1.51 3.510 5.25101 3.510 5.2510S SG S S S S ------+⨯+⨯=⨯⨯=+⨯+⨯+⨯+⨯ 3.2补偿环节的设计补偿器的传递函数为:211332121123312(1)[1()]()[()](1)(1)c sR C s R R C G s R C C sR C C s sR C C C +++=++++ (5) 有源超前-滞后补偿网络有两个零点、三个极点。
1,2694.96P P f HZ === (6)06112123.1422 3.140.025300010Z C f HZ R C π-===⨯⨯⨯⨯ (7)100.750.75694.96521.22Z P f f HZ ==⨯= (8)2020694.962123.14Z P P Z f f HZ f f HZ ==== (9)31005022S P f f KHZ === (10) 零点为:1211521.222z f HZ R C π==,()21331311694.9622z f HZ R R C R C ππ=≅=+ (11) 极点为:1p f 为原点,23312p f R C π=,32121212p f R C C C C π=+ (12) 频率1z f 与2z f 之间的增益可近似为:211R AV R =在频率2p f 与3p f 之间的增益则可近似为:()21322133R R R R AV R R R +=≈+考虑达到抑制输出开关纹波的目的,增益交接频率取 1002055fs fg KHZ===(s f为开关频率)开环传函()oG s的极点频率为:1,2694.96P Pf HZ=== (13)将()cG s两个零点的频率设计为开环传函()oG s两个相近极点频率的12,则:1,21112694.96347.4822p pfz fz f===⨯=。
(14)将补偿网络()cG s两个极点设为23100P Pf f fs KHZ===以减小输出的高频开关纹波。
()22112zc ggf RAV G j ff Rπ==()22232pc ggf RAV G j ff Rπ==根据已知条件使用MATLAB程序算得校正器Gc(s)各元件的值如下:取 R2=10000欧姆H(S)=3/10算得:R1=1.964e+004欧姆 R3=6.8214欧姆C1=4.5826e-008F C2=1.5915e-011F C3=2.3332e-008F fz1 =347.3046HZ fz2 =347.3046HZ fp2 = 1000KHZ fp3 =1000KHZA V1 =0.5091 A V2 =1.4660e+003由(2)(3)式得:G(s)=1.197e-024s^5+1.504e-017s^4+4.728e-011s^3+3.18e-008s^2+0.000900 4s/4.727e-011s^3+8.365e-007s^2+0.002975s+3补偿器伯德图为:图4-1-1 超前滞后校正器的伯德图加入补偿器后:图4-1-2加入补偿器后系统的伯德图相角裕度和幅值裕度为:图4-1-3加入补偿器后系统的相角裕度和幅值裕度相角裕度到达172度,符合设计要求。
(所用MATLAB程序见附录)四、BUCK变换器系统的仿真4.1仿真参数及过程描述仿真参数:358230.225101 3.510 5.2510SGS S---+⨯=+⨯+⨯G(s)=1.197e-024s^5+1.504e-017s^4+4.728e-011s^3+3.18e-008s^2 +0.0009004s/4.727e-011s^3+8.365e-007s^2+0.002975s+34.2仿真模型图及仿真结果图4-2-1 主电路仿真图图4-2-2 仿真波形图4-2-3 加PID控制的仿真电路图4-2-4 仿真波形五、总结本设计论文完成了设计的基本要求详尽的阐述了设计依据,工作原理叙述,BUCK电路的设计,PID控制设计,传递函数参数计算,电路仿真。
在进行本设计论文撰写时,我能够积极的查阅资料,和别人讨论,积极的采纳别人的意见。
对电路的工作原理、参数的基数过程,所用器件的选择都进行了深入的阐述。
我能够认真撰写论文,对论文进行进一步的修改。
深入研究课题所涉及的内容,希望此设计能够对达到其预期的效果。
由于时间和自身水平的限制,我所做的设计还有很多的不足之处。
但通过这段时间以来的实践,我也掌握了很多的经验和教训。
通过这次的课程设计,我了解到怎样把自己在书本上学习到的知识应用到实际的工作之中,也学到很多待人处事的道理,想这在我以后的工作和学习中将是我的宝贵财富。
程序clc;Clear;Vg=;L=;C=;fs=;R=;Vm=;H=;G0=tf[Vg*H],[L*CFigure(1)Margin(G0)fp1=1/(2*pi*sqrt(L*C));Fg(1/2)*fs;Fz1=(1/2)*fp1;Fz2=(1/2)fp1;Fp2=fs;Fp3=fs;[marg_G0,phase_G0]=bode(G0,fg*2*pi);Marg_G=1/marg_G0;A V1=fz2/fg*marg_G;A V2=fp2/fg*marg_G;R2=10*10^3;R3=R2/A V2;C1=1/(2*pi*fz1*R2);C3=1/(2*pi*fzp2*R3);C2=1/(2*pi*fp3*R2);R1=1/(2*pi*C3*fz1);Num=conv([C1*R2 1],[(R2+R3)*C3 1]);Den1=conv([(C1+C2)*R1 0],[R3*C3 1]);Den=conv(den1,[R2*C1*C2/(C1+C2) 1]);Gc=tf(num,den);Figure(2);Bode(Gc);G=series(Gc,G0);Figure(3)Margin(G)11。