现代控制理论-第7章
自动控制原理第7章_非线性控制系统
7.2 相平面法
1. 基本概念 2. 相平面图的绘制 3. 线性系统的相轨迹 4. 非线性系统的相平面分析
7.2 相平面法
1. 基本概念 相平面法是一种求解二阶常微分方程的图解方法。 1) 相平面图 f ( x, x ) 0 x 二阶系统的数学描述 ,得下列一阶微分方程组 设x1=x,x2= x
非线性系统一般理解为非线性微分方程所描述的
系统。 线性系统的本质特征是叠加原理,因此非线性系 统也可以理解为不满足叠加原理的系统。
7.1 概述
2. 典型的非线性特性
1) 饱和特性
2) 死区特性
3) 间隙特性(滞环特性)
4) 变放大系数特性
5) 继电器特性
7.1 概述
1) 饱和特性
x(t) k 0 a e(t)
数学表达式
ke(t ) x(t ) ka signe(t )
1 signe(t ) 1 不定
e(t ) a e(t ) a
-a
符号函数(开关函数)
e(t ) 0 e(t ) 0 e(t ) 0
图 7.2 饱和特性
a – 线性域宽度 k – 线性域斜率
(d)半稳定极限环
(a) 可通过实验观察到。设计时应尽量减少极限环 的大小,以满足系统的稳态误差要求。
(b) 不能通过实验观察到。设计时应尽量增大极限 环的大小,以扩大系统的稳定域。
(c)、(d)不能通过实验观察到。(c)不稳定。(d)稳 定,但过渡过程时间将由于极限环的存在而增加。
7.2 相平面法
单输入-单输出的线性定常系 统
现代控制理论(20世纪50 年代后)
可以是比较复杂的系统
现代控制理论智慧树知到课后章节答案2023年下长安大学
现代控制理论智慧树知到课后章节答案2023年下长安大学长安大学绪论单元测试1.下列语句中,不正确的是()。
A:现代控制理论是建立在状态空间法基础上的一种控制理论,是自动控制理论的一个主要组成部分,可以解决经典控制理论不能解决的所有控制难题。
B:现代控制理论比经典控制理论所能处理的控制问题要广泛得多,包括线性系统和非线性系统,定常系统和时变系统,单变量系统和多变量系统;C:20世纪50年代中期,空间技术的迅速发展迫切要求建立新的控制原理,以解决诸如把宇宙火箭和人造卫星用最少燃料或最短时间准确地发射到预定轨道一类的控制问题;D:在现代控制理论中,对控制系统的分析和设计主要是通过对系统的状态变量的描述来进行的,基本的方法是时间域方法;答案:现代控制理论是建立在状态空间法基础上的一种控制理论,是自动控制理论的一个主要组成部分,可以解决经典控制理论不能解决的所有控制难题。
2.通过测量输出量,产生一个与输出信号存在函数关系的信号的元件称为()。
A:给定元件B:放大元件C:反馈元件D:比较元件答案:比较元件3.闭环控制系统的控制方式为()。
A:按扰动信号控制B:按输入信号控制C:按偏差信号控制D:按反馈信号控制答案:按偏差信号控制4.经典控制理论描述系统的数学模型是由高阶线性常微分方程演变来的传递函数,适合分析和设计下列哪种系统()A:非线性系统B:单输入单输出系统C:线性定常系统D:多输入多输出系统答案:单输入单输出系统;线性定常系统5.现代控制理论是建立在状态空间法基础上的一种控制理论,是自动控制理论的一个主要组成部分,比经典控制理论所能处理的控制问题要广泛得多,适合分析和设计下列哪种系统()A:非线性系统B:线性时变系统C:多输入多输出系统D:线性定常系统答案:非线性系统;线性时变系统;多输入多输出系统;线性定常系统第一章测试1.系统状态空间实现中选取状态变量不是唯一的,其状态变量的个数是唯一的()A:对 B:错答案:对2.多输入-多输出系统的U-Y 间的传递函数为()A:错 B:对答案:对3.由一个状态空间模型可以确定多个传递函数。
现代控制理论课后习题答案

现代控制理论课后习题答案第⼀章习题1.2求下列多项式矩阵()s D 和()s N 的两个不同的gcrd:()2223(),()1232s s s s s s s s s ??++== ? ?+-??D N 解:()()22232321s s s s s s s++ =++ ? ?D S N S ; ()3r 2,1,2E -:223381s s s s s s ??++ ?-- ? ???;()3r 2,3,3E :223051s s s s s ??++ ?- ? ???;()3r 1,3,2E s --:01051s s ?? ?- ? ;()3r 2,1,5E s -:01001s ?? ?;()3r 3,1,1E -:01000s ?? ? ? ???;()1r 2,3E :01000s ?? ? ? ???;()1r 1,2E :00100s ?? ?;所以⼀个gcrd 为001s ??;取任⼀单模矩阵预制相乘即可得另⼀个gcrd 。
1.9 求转移矩阵t A e (1)已知1141??=A ,根据拉⽒反变换求解转移矩阵tA e 。
(2) 已知412102113-?? ?= ? ?-??A ,根据C-H 有限项展开法求解转移矩阵t A e 。
解:(1)11()41s s s --??-= ?--??I A1110.50.50.250.2511(3)(1)(3)(1)13131()4141110.50.5(3)(1)(3)(1)(3)(1)3131s s s s s s s s s s s s s s s s s s s s s s s --+---+-+??-+-+ ? ?-=== ? ?---+ ?-+ ? ?-+-+-+-+?I A 3311330.5e 0.5e 0.25e 0.25e e ()e e 0.5e 0.5e t t t t t t tt t s ------??+-??=-= ??? ?-+?A L I A (2)由2412()12(1)(3)0113λλλλλλ--?? ?=--=--= ? ?--??A I -,得1,233,1λλ== 对1,23λ=,可以计算1,2()2rank λ=A I -,所以该特征值的⼏何重数为1。
第7章 非线性系统的分析

某一初始条件出发在相平面上按照式(7-13)或式(7-14)绘出的
曲线称为相平面轨迹,简称相轨迹。不同初始条件下构成的
相轨迹,称为相轨迹簇。由相轨迹簇构成的图称为相平面图。
利用相平面图分析系统性能的方法,称为相平面分析法。
图7-6为某个非线性系统的相平面图。图中,相轨迹上的
箭头表示相变量随着时间的增加沿相轨迹运动的方向。
第7章 非线性系统的分析 7.2 相平面分析法
7.2.1 相平面的基本概念 设二阶非线性系统的微分方程为
第7章 非线性系统的分析
第7章 非线性系统的分析
1.相平面和相轨迹
前面已经设定
我们称以x1(或x)为横坐
标、以x2(或 )为纵坐标构成的平面为相平面(注意,纵坐标x2
是横坐标x1的一阶导数),如图7-6所示。x1、x2为相变量。由
7.2.2 线性系统的相轨迹 在学习非线性系统的相平面分析法之前,我们先对非常
熟悉的线性系统做相平面分析。设二阶线性系统的微分方程 为
第7章 非线性系统的分析
也就是说,无论系统特征参数ωn和ξ是何值,系统的奇点是 不变的。此外,式(7-21)的特征方程为
系统的特征根为
对于不同的阻尼比ξ,二阶系统特征根的形式是不同的,而 线性系统的时域响应是由特征根决定的。下面介绍系统特征 根与系统的奇点(0,0)以及相轨迹的关系。
行线性化。我们只研究系统平衡点附近的特性时,就可以采 用平衡点附近的线性化方法,将非线性系统在平衡点附近小 范围线性化。当然,也可以将非线性系统分为几个区域,对每 个区域进行分段线性化。
第7章 非线性系统的分析
2.相平面分析法 相平面分析法简称相平面法,是非线性系统的图解分析 法。其基本思路是:建立一个相平面,在相平面上根据非线性 系统的结构和特性,绘制非线性系统的相轨迹。相轨迹就是 非线性系统中的变量在不同初始条件下的运动轨迹,根据相 轨迹就可以对非线性系统进行分析。该方法只适用于一阶和 二阶非线性微分方程。
现代控制理论-第7章 最优控制

(3)控制规律:
u* kx(t)
P由黎卡提微分k 方Q2程1BT得P 到 边界条件:P(tf)=Q0
PA AT P PBQ21BT P Q1 P(t)
例:求解使:J最小的u*(t)
0 1 0 x 0 0x 1u,
பைடு நூலகம்
J
第二节 状态调节器
在不消耗过多控制能量的前提下,使系统各状态在受 到外界干扰作用下,维持平衡状态。
一.无限长时间状态调节器
1.原系统:可控系统
2.性能指标: 说明:(1) J
x Ax Bu, y Cx
12表0 (示xTQ1系x u统TQ2要u)d求t 状态变量偏离平衡点的累积
u* kx(t)
3.控制规律
k Q21BT P
正定实对称P由黎卡提代数方程得到:
PA AT P PBQ21BT P Q1 0
例:求使J最小的u*(t)。 0 1 0
解:
x 0 0x 1u,
J
1
(xT
x uTu)dt
误差最小,这xTQ意1x 味着因某种原因系统状态偏离平衡点,控制
作用应使它很快回复到平衡点,调节器的名称由此而来
(2) 表示在控制过程中,消耗的能量最小
J中(3的u)TQ权Q2u1重半正定,Q2正定,用来确定状态变量与控制能量在
即寻求控制规律,使系统的状态变量x(t)按性能指标J的要 求,在无限长的时间内达到平衡点
1.原系统:可控、可观系统
x Ax Bu, y Cx
2.性能指标:J
1 2
[(y
0
《现代控制理论》第三版_.习题答案
1 0 0 3 1 0 5 2 1 52 7 1 5 2 70 125 3 5 7 5 0 0 1 1 B 2 ; 2 5 5
1 0 a1 0 0 1 0 1 0 0 1 a2 3 7 5
0 B 0 1
C (b0 a0bn ) (bn1 an1bn ) 2 1 0
3 1 a 或者 2 2 1 a1 0 a0
e At I At 1 22 1 33 A t A t 2! 3! t2 t4 t6 t3 t5 1 4 16 64 , 4 16 t 2! 4! 6! 3! 5! 3 5 2 4 6 t t t t t t 4 16 64 , 1 4 16 64 3! 5! 2! 4! 6!
0 0 1 B M 1 0 0 0 0 1 M2
1 0 B 1 M1 B1 M2
1 B1 M1 B1 B2 M2
0
0 0 1 0 C 0 0 0 1
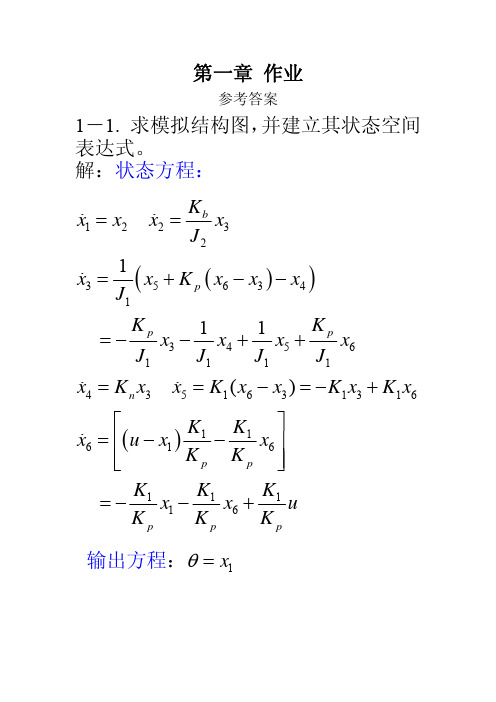
1-5. 根据微分方程, 写状态方程, 画模 拟结构图。
1 a2 a2 2 a1 3 2 a a a 1 2 2 a0
1 a2 a1
1 a2
12 b1 b0
b3 b 2 b1 1 b0
凯莱哈密顿法: 1,2 2 j
0 (t ) 1 1 e1t 1 2(e 2 jt e 2 jt ) (t ) 1 2t 4 2 jt 2 jt e j ( e e ) 2 1
第7章现代控制理论上课讲义

dl (dx)2(dy)2
单元弧长变化率
dl 1 y&2 dx 因而 A 、 B 两点间曲线长度
J y(x) l x2 1 y&2dx x1
其值取决于函数 y(x) 的选取。
1
tdt
0
1 2
t2
1 0
1 2
J (x)
1
sin tdt
( cos t) 1
1 cos1
0
0
在这里需要注意的是,不定积分 J (x) x(t)dt 并不是一个泛函,因为无论函数 x(t)
如何选取, J (x(t)) 没有一个确定的值。
2020年6月28日
第7章第11页
又如平面上给定两点之间的曲线长度是一个泛函。设 ( x, y) 平面上有 A 、B 两点,其坐标
J (C1x1(t) C2 x2 (t)) C1J ( x1(t)) C2J ( x2 (t)) ,且其增量可以表示为
m ( t ) 飞船登月舱质量 h ( t ) 高度 v ( t ) 垂直速度
u ( t ) 发动机推力 g 月球重力加速度为常数
M 飞船登月舱不含燃料时的质量 F 登月舱所载燃料质量 h 0 登月舱登月时的初始高度 v 0 初始垂直速度
2020年6月28日
第7章第3页
登月舱的运动方程
h&( t ) v ( t )
本节在简要地介绍泛函及变分学的概念和原理的基础上,着重阐 述无约束条件的最优控制变分求解和有等式约束条件的最优控制 变分求解方法。
2020年6月28日
第7章第9页
7.2.1 泛函与变分法的基本概念
现代控制理论基础 第7章 状态空间分析法在工程中的应用

h2
特征多项式
1 0
0 1
1
w
0
u
h02 h1 h0h1 h2
y
11 0 1 h0h2 11h1
h0
x1
w
h1
y
h2
I (A11 hA21) 3 h02 (11 h1) (11h0 h2 )
期望极点-3, -2+j, -2-j;期望特征方程
g0 9, g1 42, g2 148, g3 492
状态反馈
12
五、降维观测器设计
由于小车位移z可测,无需估计,可用降维观测器进行设计。重新排列系统状 态变量次序,把需由降维观测器估计的变量与可观测的变量分开,则状态方程 和输出方程为
d dt
•
z
•
--z--
0 1 0 0
第七章 状态空间分析法在工程中的应用
第一节 单倒置摆系统的状态空间设计 第二节 大型桥式吊车行车系统的状态空间设计 第三节 液压伺服电机最优控制系统
1
线性控制理论在工程设计中应用最广泛的是状态空 间综合方法,也就是状态反馈与状态观测器的相关理论 与方法。本章通过三个工程实例予以说明状态空间分析 方法的具体应用。
3
若不给小车施加控制力,是一个不稳定系统。 控制的目的是,当倒置摆无论出现向左或向右倾倒时,通过控制直
流电动机使小车在水平方向运动,将倒置摆保持在垂直位置上。
4
一、倒置摆的状态空间描述
根据牛顿定律
M d 2z m d 2 (z l sin ) u
dt 2
dt 2
由于绕摆轴旋转运动的惯性力矩应与重力矩平衡,因而有
(6-3) (6-4)
联立求解
..
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第六次课小结一、 Lyapunov 意义下的稳定性问题基本概念平衡状态的概念Lyapunov 意义下的稳定性定义(稳定,一致稳定,渐进稳定,一致渐进稳定,大范围渐进稳定等)纯量函数的正定性,负定性,正半定性,负半定性,不定性 二次型,复二次型(Hermite 型)二、 Lyapunov 稳定性理论第一方法 第二方法三、 线性定常系统的Lyapunov 稳定性分析应用Lyapunov 方程Q PA P A H -=+来进行判别稳定性四、 线性定常系统的稳定自由运动的衰减率性能估计衰减系数,一旦定出min η,则可定出)(x V 随时间t 衰减上界。
计算min η的关系式五、 离散时间系统的状态运动稳定性及其判据离散系统的大范围淅近稳定判据,Lyapunov 稳定判据在离散系统中的应用六、线性多变量系统的综合与设计的基本问题问题的提法性能指标的类型研究的主要内容七、极点配置问题问题的提出可配置条件极点配置算法爱克曼公式(Ackermann’s Formula) 考虑由式()给出的系统,重写为Bu Ax x +=&假设该被控系统是状态完全能控的,又设期望闭环极点为n s s s μμμ===,,,21Λ。
利用线性状态反馈控制律Kx u -=将系统状态方程改写为x BK A x )(-=&定义BK A A -=~则所期望的特征方程为)())((~11121=++++=---=-=+-**--*n n n n n a s a s a s s s s A sI BK A sI ΛΛμμμ由于凯莱-哈密尔顿定理指出A ~应满足其自身的特征方程,所以0~~~)~(**11*1*=++++=--I a A a A a A A n n n n Λφ我们用式()来推导爱克曼公式。
为简化推导,考虑n = 3的情况。
需要指出的是,对任意正整数,下面的推导可方便地加以推广。
考虑下列恒等式22333222~~)(~~)(~~ABK A ABK BK A A BK A A A BK ABK A BK A A BKA A I I ---=-=--=-=-== 将上述方程分别乘以)1(,,,*0*0*1*2*3=a a a a a ,并相加,则可得32*1*2*3~~~AA a A a I a +++ -+--+-+=32*1*2*3)~()(A A BK ABK A a BK A a I a22~~A BK A ABK BK A --------+++=BK A A BK a ABK a BK a A A a A a I a 2*1*1*232*1*2*3~2~~A BK A ABK -- ()参照式()可得0)~(~~~*32*1*2*3==+++A A A a A a I a φ也可得到0)(*32*1*2*3≠=+++A A A a A a I a φ将上述两式代入式(),可得BK A A ABK ABK a A BK A BK a BK a A A 2*12*1*2**~~~)()~(------=φφ由于0)~(*=A φ,故BKA A K K a AB A K A K a K a B A 2*12*1*2*)~()~~()(+++++=φ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+++=KA K K a A K A K a K aB A AB B ~~~][*12*1*22M M ()由于系统是状态完全能控的,所以能控性矩阵][2B A AB B Q M M =的逆存在。
在式()的两端均左乘能控性矩阵Q 的逆,可得⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+++=-KA K K a A K A K a K aA B A AB B ~~~)(][*12*1*2*12φM M上式两端左乘[0 0 1],可得K K A K K a A K A K a K a A B A AB B =⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+++=-~~~]100[)(]][100[*12*1*2*12φM M 重写为)(][]100[*12A B A AB B K φ-=M M从而给出了所需的状态反馈增益矩阵K 。
对任一正整数n ,有)(]][1000[*11A B A AB B K n φ--=M ΛM M Λ式()称为用于确定状态反馈增益矩阵K 的爱克曼方程。
------------------------------------------------- [例] 考虑如下线性定常系统Bu Ax x +=&式中⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---=100,651100010B A利用状态反馈控制Kx u -=,希望该系统的闭环极点为s = -2±j 4和s = -10。
试确定状态反馈增益矩阵K 。
首先需检验该系统的能控性矩阵。
由于能控性矩阵为:⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡--==316161010][2B A AB B Q M M所以得出det Q = -1,因此,rank Q = 3。
因而该系统是状态完全能控的,可任意配置极点。
下面,我们来求解这个问题,并用本章介绍的3种方法中的每一种求解。
方法1:第一种方法是利用式()。
该系统的特征方程为:1566511001||3221323=+++=+++=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+--=-a s a s a s s s s s s s A sI因此1,5,6321===a a a期望的特征方程为2006014)10)(42)(42(*3*22*1323=+++=+++=+++-+a s a s a s s s s s j s j s因此200,60,14*3*2*1===a a a参照式(),可得]855199[]6145601200[=---=M M K方法2:设期望的状态反馈增益矩阵为][321k k k K =并使||BK A sI +-和期望的特征多项式相等,可得⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡----⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=+-651100010000000||s s s BK A sI 321[100k k k ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+ 20060141)5()6(65110012312233321+++=++++++=++++--=s s s k s k s k s k s k k s s因此2001,605,146123=+=+=+k k k从中可得8,55,199321===k k k或]855199[=K方法3:第三种方法是利用爱克曼公式。
参见式(),可得)(]][100[*12A B A AB B K φ-=M M由于I A A A A 2006014)(23*+++=φ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---=11743771598855199100010001200651100010606511000101465110001023且⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡--=3161610100][2B A AB B M M可得]855199[11743771598855199001016165]100[117437715988551993161610100]100[1=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡--=-K 显然,这3种方法所得到的反馈增益矩阵K 是相同的。
使用状态反馈方法,正如所期望的那样,可将闭环极点配置在s = -2±j 4和s = -10处。
------------------------------------------------------------------------------ 应当注意,如果系统的阶次n 等于或大于4,则推荐使用方法1和3,因为所有的矩阵计算都可由计算机实现。
如果使用方法2,由于计算机不能处理含有未知参数n k k k ,,,21Λ的特征方程,因此必须进行手工计算。
注释对于一个给定的系统,矩阵K 不是唯一的,而是依赖于选择期望闭环极点的位置(这决定了响应速度与阻尼),这一点很重要。
注意,所期望的闭环极点或所期望状态方程的选择是在误差向量的快速性和干扰、测量噪声的灵敏性之间的一种折衷。
也就是说,如果加快误差响应速度,则干扰和测量噪声的影响通常也随之增大。
如果系统是2阶的,那么系统的动态特性(响应特性)正好与系统期望的闭环极点和零点的位置联系起来。
对于更高阶的系统,期望的闭环极点位置不能和系统的动态特性(响应特性)联系起来。
因此,在决定给定系统的状态反馈增益矩阵K 时,最好通过计算机仿真来检验系统在几种不同矩阵(基于几种不同的期望特征方程)下的响应特性,并且选出使系统总体性能最好的矩阵K。
利用MATLAB求解极点配置问题用MATLAB易于求解极点配置问题。
现在我们来求解在例中讨论的同样问题。
系统方程为=x+BuAx&式中⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---=100651100010B A ,采用状态反馈控制Kx u -=,希望系统的闭环极点为s =μi(i=1,2,3),其中10,42,42321-=--=+-=μμμj j现求所需的状态反馈增益矩阵K 。
如果在设计状态反馈控制矩阵K 时采用变换矩阵P ,则必须求特征方程|s I-A |=0的系数1a 、2a 、和3a 。
这可通过给计算机输入语句P = poly(A )来实现。
在计算机屏幕上将显示如下一组系数:则)4(3),3(2),2(1321P a a P a a P a a ======。
为了得到变换矩阵P ,首先将矩阵Q 和W 输入计算机,其中][2B A AB B Q M M =⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=001011112a a a W然后可以很容易地采用MATLAB 完成Q 和W 相乘。
其次,再求期望的特征方程。
可定义矩阵J ,使得⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---+-=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=10000420042000000321j j J μμμ 从而可利用如下poly(J )命令来完成,即因此,有)4(3),3(2),2(1*3*2*1Q aa a Q aa a Q aa a ======即对于*i a ,可采用aai 。
故状态反馈增益矩阵K 可由下式确定:1112233][-***---=P a a a a a a K或))(inv (*]112233[P a aa a aa a aa K ---=采用变换矩阵P 求解该例题的MATLAB 程序如MATLAB Program 所示。
如果采用爱克曼公式来确定状态反馈增益矩阵K ,必须首先计算矩阵特征方程φ(A )。
对于该系统I a A a A a A A *3*22*13)(+++=φ在MATLAB 中,利用Polyvalm 可计算矩阵多项式φ(A )。