现代控制理论第一章答案1
现代控制理论习题解答(第一章)

Ra
La
i f = 常数
ua
f ia D J
ω
ML
【解】: 设状态变量为:
题 1-2 图
⎡ x1
⎢ ⎣
x
2
⎤ ⎥ ⎦
=
⎡ia ⎢⎣ω
⎤ ⎥ ⎦
其中 ia 为流过电感上的电流, ω 电动机轴上的角速度。 电动机电枢回路的电压方程为:
eb 为电动机反电势。 电动机力矩平衡方程为
•
ua = La ia + Ra ⋅ ia + eb
(4) y (4) + 3y + 2y = −3u + u
【解】:
5
在零初始条件下,方程两边拉氏变换,得到传递函数,再根据传递函数求状态空间 表达式。 此题多解,一般写成能控标准型、能观标准型或对角标准型,以下解法供参考。 (1)传递函数为:
状态空间表达式为:
G(s) =
2
s3 + 2s2 + 4s + 6
1⎤
R 2 C1 −1
R2C2
⎥ ⎥ ⎥
⎡ ⎢ ⎣
x1 x2
⎥⎦
⎤ ⎥ ⎦
+
⎡ ⎢ ⎢ ⎣
1
R1C1 0
⎤ ⎥⎥u i ⎦
y = u0 = [0
1]⎢⎡
⎣
x1 x2
⎤ ⎥ ⎦
(2)
设状态变量: x1 = iL 、 x2 = uc 而
1
根据基尔霍夫定律得: 整理得
•
iL = C uc
•
ui = R ⋅ iL + LiL + uc
•
M D = J ω + fω + M L
现代控制理论第版课后习题答案
现代控制理论第版课后习题答案Prepared on 22 November 2020《现代控制理论参考答案》第一章答案1-1 试求图1-27系统的模拟结构图,并建立其状态空间表达式。
解:系统的模拟结构图如下: 系统的状态方程如下: 令y s =)(θ,则1x y =所以,系统的状态空间表达式及输出方程表达式为1-2有电路如图1-28所示。
以电压)(t u 为输入量,求以电感中的电流和电容上的电压作为状态变量的状态方程,和以电阻2R 上的电压作为输出量的输出方程。
解:由图,令32211,,x u x i x i c ===,输出量22x R y =有电路原理可知:•••+==+=++3213222231111x C x x x x R x L ux x L x R 既得22213322222131111111111x R y x C x C x x L x L R x u L x L x L R x =+-=+-=+--=•••写成矢量矩阵形式为:1-4 两输入1u ,2u ,两输出1y ,2y 的系统,其模拟结构图如图1-30所示,试求其状态空间表达式和传递函数阵。
解:系统的状态空间表达式如下所示: 1-5系统的动态特性由下列微分方程描述列写其相应的状态空间表达式,并画出相应的模拟结构图。
解:令..3.21y x y x y x ===,,,则有相应的模拟结构图如下: 1-6 (2)已知系统传递函数2)3)(2()1(6)(+++=s s s s s W ,试求出系统的约旦标准型的实现,并画出相应的模拟结构图解:ss s s s s s s s W 31233310)3(4)3)(2()1(6)(22++++-++-=+++= 1-7 给定下列状态空间表达式[]⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡----=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡321321321100210311032010x x x y u x x x x x x ‘(1) 画出其模拟结构图 (2) 求系统的传递函数 解:(2)⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+-+-=-=31103201)()(s s s A sI s W 1-8 求下列矩阵的特征矢量(3)⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---=6712203010A 解:A 的特征方程 061166712230123=+++=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+---=-λλλλλλλA I 解之得:3,2,1321-=-=-=λλλ当11-=λ时,⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---3121113121116712203010p p p p p p 解得: 113121p p p -== 令111=p 得 ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡--=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=1113121111p p p P(或令111-=p ,得⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=1113121111p p p P ) 当21-=λ时,⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---32221232221226712203010p p p p p p 解得: 1232122221,2p p p p =-= 令212=p 得 ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=1423222122p p p P(或令112=p ,得⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡-=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=21213222122p p p P )当31-=λ时,⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---33231333231336712203010p p p p p p 解得: 133313233,3p p p p =-= 令113=p 得 ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=3313323133p p p P1-9将下列状态空间表达式化成约旦标准型(并联分解)(2)⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎦⎤⎢⎣⎡=⎥⎦⎤⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡--=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡32121321321110021357213311201214x x x y y u x x x x x x解:A 的特征方程 0)3)(1(311212142=--=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡------=-λλλλλλA I 当31=λ时,⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡--3121113121113311201214p p p p p p 解之得 113121p p p == 令111=p 得 ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=1113121111p p p P当32=λ时,⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡--1113311201214312111312111p p p p p p 解之得 32222212,1p p p p =+= 令112=p 得 ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=0013222122p p p P当13=λ时,⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡--332313332313311201214p p p p p p 解之得3323132,0p p p == 令133=p 得 ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=1203323133p p p P约旦标准型1-10 已知两系统的传递函数分别为W 1(s)和W 2(s)试求两子系统串联联结和并联连接时,系统的传递函数阵,并讨论所得结果 解:(1)串联联结 (2)并联联结1-11 (第3版教材)已知如图1-22所示的系统,其中子系统1、2的传递函数阵分别为求系统的闭环传递函数解:1-11(第2版教材) 已知如图1-22所示的系统,其中子系统1、2的传递函数阵分别为求系统的闭环传递函数 解:1-12 已知差分方程为试将其用离散状态空间表达式表示,并使驱动函数u 的系数b(即控制列阵)为(1)⎥⎦⎤⎢⎣⎡=11b解法1: 解法2:求T,使得⎥⎦⎤⎢⎣⎡=-111B T 得⎥⎦⎤⎢⎣⎡=-10111T 所以 ⎥⎦⎤⎢⎣⎡-=1011T 所以,状态空间表达式为第二章习题答案2-4 用三种方法计算以下矩阵指数函数At e 。
现代控制理论课后习题答案

现代控制理论课后习题答案第⼀章习题1.2求下列多项式矩阵()s D 和()s N 的两个不同的gcrd:()2223(),()1232s s s s s s s s s ??++== ? ?+-??D N 解:()()22232321s s s s s s s++ =++ ? ?D S N S ; ()3r 2,1,2E -:223381s s s s s s ??++ ?-- ? ???;()3r 2,3,3E :223051s s s s s ??++ ?- ? ???;()3r 1,3,2E s --:01051s s ?? ?- ? ;()3r 2,1,5E s -:01001s ?? ?;()3r 3,1,1E -:01000s ?? ? ? ???;()1r 2,3E :01000s ?? ? ? ???;()1r 1,2E :00100s ?? ?;所以⼀个gcrd 为001s ??;取任⼀单模矩阵预制相乘即可得另⼀个gcrd 。
1.9 求转移矩阵t A e (1)已知1141??=A ,根据拉⽒反变换求解转移矩阵tA e 。
(2) 已知412102113-?? ?= ? ?-??A ,根据C-H 有限项展开法求解转移矩阵t A e 。
解:(1)11()41s s s --??-= ?--??I A1110.50.50.250.2511(3)(1)(3)(1)13131()4141110.50.5(3)(1)(3)(1)(3)(1)3131s s s s s s s s s s s s s s s s s s s s s s s --+---+-+??-+-+ ? ?-=== ? ?---+ ?-+ ? ?-+-+-+-+?I A 3311330.5e 0.5e 0.25e 0.25e e ()e e 0.5e 0.5e t t t t t t tt t s ------??+-??=-= ??? ?-+?A L I A (2)由2412()12(1)(3)0113λλλλλλ--?? ?=--=--= ? ?--??A I -,得1,233,1λλ== 对1,23λ=,可以计算1,2()2rank λ=A I -,所以该特征值的⼏何重数为1。
《现代控制理论》第三版_.习题答案
K1
0 0 K1
K p
B 0 0 0 0 0
K1
T
K p
C 1 0 0 0 0 0;
1-3.
图
1-29
机械系统。M1
M
受外力
2
作用 f1 f2作用,求M1 M 2运动速度输出的
状态空间表达式。
解:微分方程 M1 y1 f1 K1(c1 c2 ) B1( y1 y2 )
M 2 y2 f2 K2c2 B2 y2 K1(c1 c2 ) B1( y1 y2 )
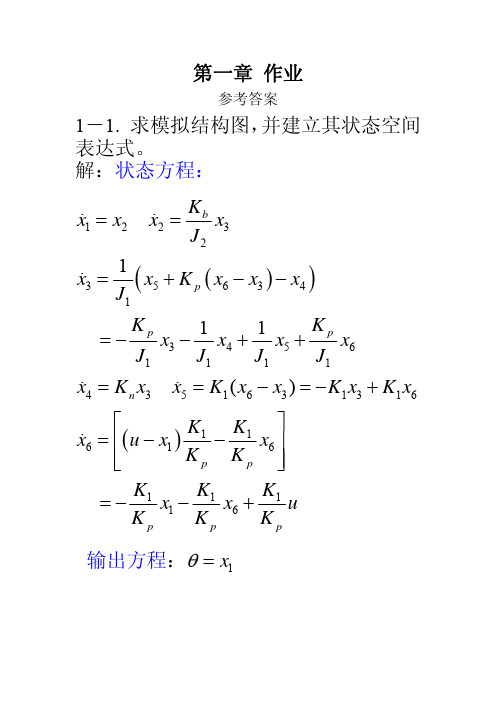
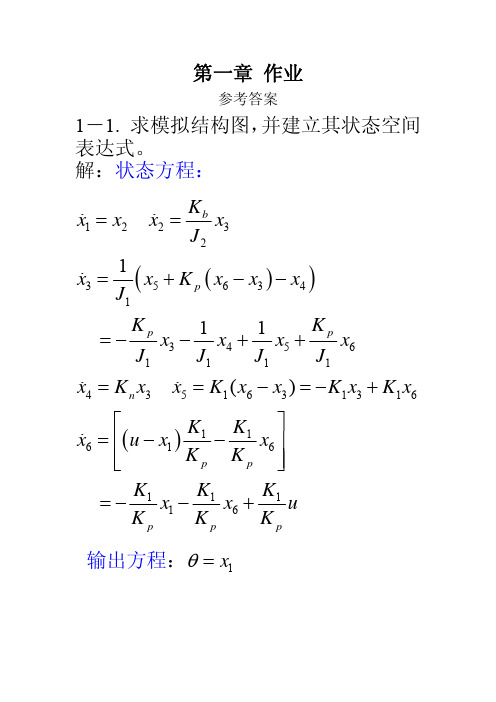
第一章 作业
参考答案
1-1. 求模拟结构图,并建立其状态空间 表达式。 解:状态方程:
x1 x2
x2
Kb J2
x3
x3
1 J1
x5 K p x6 x3 x4
Kp J1
x3
1 J1
x4
1 J1
x5
Kp J1
x6
x4 Kn x3 x5 K1(x6 x3 ) K1x3 K1x6
x 6
设状态变量 x = c1 c2 y1 y2 T
y y1 y2 T ,u f1 f2 T
令 x1 c1, x2 c2, x3 y1, x4 y2
x1 x3 x2 x4
x3
K1 M1
x1
K1 M1
x2
B1 M1
x3
B1 M1
x4
1 M1
f1
x4
K1 M2
x1
K1 K2 M2
第二章 作业
参考答案
2-4. 用三种方法计算eAt (定义法,约 当标准型,拉氏反变换,凯莱哈密顿)
(1)
A
0 4
1 0
直接法(不提倡使用,除非针对一些特
《现代控制理论》第三版_.习题答案
1 0 0 3 1 0 5 2 1 52 7 1 5 2 70 125 3 5 7 5 0 0 1 1 B 2 ; 2 5 5
1 0 a1 0 0 1 0 1 0 0 1 a2 3 7 5
0 B 0 1
C (b0 a0bn ) (bn1 an1bn ) 2 1 0
3 1 a 或者 2 2 1 a1 0 a0
e At I At 1 22 1 33 A t A t 2! 3! t2 t4 t6 t3 t5 1 4 16 64 , 4 16 t 2! 4! 6! 3! 5! 3 5 2 4 6 t t t t t t 4 16 64 , 1 4 16 64 3! 5! 2! 4! 6!
0 0 1 B M 1 0 0 0 0 1 M2
1 0 B 1 M1 B1 M2
1 B1 M1 B1 B2 M2
0
0 0 1 0 C 0 0 0 1
1-5. 根据微分方程, 写状态方程, 画模 拟结构图。
1 a2 a2 2 a1 3 2 a a a 1 2 2 a0
1 a2 a1
1 a2
12 b1 b0
b3 b 2 b1 1 b0
凯莱哈密顿法: 1,2 2 j
0 (t ) 1 1 e1t 1 2(e 2 jt e 2 jt ) (t ) 1 2t 4 2 jt 2 jt e j ( e e ) 2 1
《现代控制理论》第三版第一章.习题答案
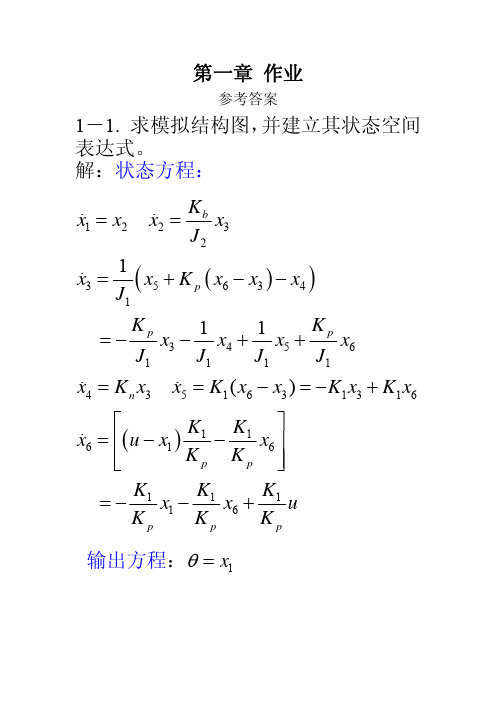
第一章 作业参考答案1-1. 求模拟结构图,并建立其状态空间表达式。
解:状态方程:()()()1223235634134561111435163131161611116111()bp pp n p p p p p K xx x x J xx K x x x J K K x x x x J J J J 16xK x xK x x K x K x K K x u x x K K K K K x x u K K K ===+--=--++==-=-+⎡⎤=--⎢⎥⎢⎥⎣⎦=--+输出方程:1x θ=矩阵形式: =xAx +B u y =Cx 其中:211111110100000000011000000000000000b 1p p n p p K J K K J J J J K K K K K K K ⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥--⎢⎥⎢⎥⎢⎥⎢⎥-⎢⎥⎢⎥--⎢⎥⎣⎦A = 100000Tp K B K ⎡⎤=⎢⎥⎢⎥⎣⎦[]100000C =;1-3. 图1-29机械系统。
1M 2M 受外力作用1f 2f 作用,求1M 2M 运动速度输出的状态空间表达式。
解:微分方程111112112()()M yf K c c B y y =---- 22222221121()12()M yf K c B y K c c B =--+-+ y y - 设状态变量[]1212Tc c y y x =[]12Ty y y =,[]12Tf f =u令11x c =,22x c =,31x y =,42x y = 13xx = 24xx = 1111312341111111K K B B x x x x x M M M M M =-+-++ f1121214124322221K K K B B B x x x x x M M M M M ++=--++22f所以 =xAx +B u y =Cx 其中:11111111112112220100001K K B B M M M M K K K B B B M M M M ⎡⎤⎢⎥⎢⎥⎢⎥--⎢⎥⎢⎥++⎢⎥--⎢⎥⎣⎦A =22 1200001010B M M ⎡⎤⎢⎥⎢⎥⎢⎥=⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦C 00100001⎡⎤=⎢⎥⎦ ⎣1-5. 根据微分方程,写状态方程,画模拟结构图。
现代控制理论第3版(刘豹_唐万生)课后答案资料
第一章答案1-1 试求图1-27系统的模拟结构图,并建立其状态空间表达式。
图1-27系统方块结构图解:系统的模拟结构图如下:图1-30双输入--双输出系统模拟结构图系统的状态方程如下:u K K x K K x K K x X K x K x x x x J K x J x J K x J K x x J K x x x pp p p n p b1611166131534615141313322211+--=+-==++--===••••••令y s =)(θ,则1x y =所以,系统的状态空间表达式及输出方程表达式为[]⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡=⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡+⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡-----=⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡••••••654321165432111111112654321000001000000000000010010000000000010x x x x x x y uK K x x x x x x K K K K K K J K J J K J K J K x x x x x x p p pp npb1-2有电路如图1-28所示。
以电压)(t u 为输入量,求以电感中的电流和电容上的电压作为状态变量的状态方程,和以电阻2R 上的电压作为输出量的输出方程。
U图1-28 电路图解:由图,令32211,,x u x i x i c ===,输出量22x R y =有电路原理可知:•••+==+=++3213222231111x C x x x x R x L ux x L x R 既得22213322222131111111111x R y x C x C x x L x L R x u L x L x L R x =+-=+-=+--=•••写成矢量矩阵形式为:[]⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎣⎡----=⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡32121321222111321000*********x x x R y u L x x x CCL L R L L R x x x 。
《现代控制理论》第3版课后习题答案
《现代控制理论参考答案》第一章答案1-1 试求图1-27系统的模拟结构图,并建立其状态空间表达式。
11K s K K p +sK s K p 1+s J 11sK n 22s J K b -++-+-)(s θ)(s U 图1-27系统方块结构图解:系统的模拟结构图如下:)(s U )(s θ---+++图1-30双输入--双输出系统模拟结构图1K pK K 1pK K 1+++pK n K ⎰⎰⎰11J ⎰2J K b ⎰⎰-1x 2x 3x 4x 5x 6x系统的状态方程如下:u K K x K K x K K x X K x K x x x x J K x J x J K x J K x x J K x x x pp p p n pb1611166131534615141313322211+--=+-==++--===••••••令y s =)(θ,则1x y =所以,系统的状态空间表达式及输出方程表达式为[]⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡=⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡+⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡-----=⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡••••••654321165432111111112654321000001000000000000010010000000000010x x x x x x y uK K x x x x x x K K K K K K J K J J K J K J K x x x x x x p p pp npb1-2有电路如图1-28所示。
以电压)(t u 为输入量,求以电感中的电流和电容上的电压作为状态变量的状态方程,和以电阻2R 上的电压作为输出量的输出方程。
R1L1R2L2CU---------Uc ---------i1i2图1-28 电路图解:由图,令32211,,x u x i x i c ===,输出量22x R y =有电路原理可知:•••+==+=++3213222231111x C x x x x R x L ux x L x R 既得22213322222131111111111x R y x C x C x x L x L R x u L x L x L R x =+-=+-=+--=•••写成矢量矩阵形式为:[]⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎣⎡----=⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡32121321222111321000*********x x x R y u L x x x CCL L R L L R x x x 。
《现代控制理论》课后习题全部答案(最完整打印版)
第一章习题答案1-1 试求图1-27系统的模拟结构图,并建立其状态空间表达式。
11K s K K p +sK s K p 1+s J 11sK n 22s J K b -++-+-)(s θ)(s U 图1-27系统方块结构图解:系统的模拟结构图如下:)(s U )(s θ---+++图1-30双输入--双输出系统模拟结构图1K pK K 1pK K 1+++pK n K ⎰⎰⎰11J ⎰2J K b ⎰⎰-1x 2x 3x 4x 5x 6x系统的状态方程如下:u K K x K K x K K x X K x K x x x x J K x J x J K x J K x x J K x x x pp p p n p b1611166131534615141313322211+--=+-==++--===∙∙∙∙∙∙阿令y s =)(θ,则1x y =所以,系统的状态空间表达式及输出方程表达式为[]⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡=⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡+⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡-----=⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡∙∙∙∙∙∙654321165432111111112654321000001000000000000010010000000000010x x x x x x y uK K x x x x x x K K K K K K J K J J K J K J K x x x x x x p p pp npb1-2有电路如图1-28所示。
以电压)(t u 为输入量,求以电感中的电流和电容上的电压作为状态变量的状态方程,和以电阻2R 上的电压作为输出量的输出方程。
R1L1R2L2CU---------Uc---------i1i2图1-28 电路图解:由图,令32211,,x u x i x i c ===,输出量22x R y =有电路原理可知:∙∙∙+==+=++3213222231111x C x x x x R x L ux x L x R 既得22213322222131111111111x R y x C x C x x L x L R x u L x L x L R x =+-=+-=+--=∙∙∙写成矢量矩阵形式为:[]⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎣⎡----=⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡32121321222111321000*********x x x R y u L x x x CCL L R L L R x x x 。
(完整word版)《现代控制理论》第3版课后习题答案
《现代控制理论参考答案》第一章答案1-1 试求图1-27系统的模拟结构图,并建立其状态空间表达式。
图1-27系统方块结构图解:系统的模拟结构图如下:图1-30双输入--双输出系统模拟结构图系统的状态方程如下:u K K x K K x K K x X K x K x x x x J K x J x J K x J K x x J K x x x pp p p n p b1611166131534615141313322211+--=+-==++--===••••••令y s =)(θ,则1x y =所以,系统的状态空间表达式及输出方程表达式为[]⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡=⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡+⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡-----=⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡••••••654321165432111111112654321000001000000000000010010000000000010x x x x x x y uK K x x x x x x K K K K K K J K J J K J K J K x x x x x x p p pp npb1-2有电路如图1-28所示。
以电压)(t u 为输入量,求以电感中的电流和电容上的电压作为状态变量的状态方程,和以电阻2R 上的电压作为输出量的输出方程。
U图1-28 电路图解:由图,令32211,,x u x i x i c ===,输出量22x R y =有电路原理可知:•••+==+=++3213222231111x C x x x x R x L ux x L x R 既得22213322222131111111111x R y x C x C x x L x L R x u L x L x L R x =+-=+-=+--=•••写成矢量矩阵形式为:[]⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎣⎡----=⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡32121321222111321000*********x x x R y u L x x x CCL L R L L R x x x 。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
习题解答2-12-22-32-42-52-62-72-82-92-102-112-122-132-142-152-162-172-182-1 如题图2-1所示为RLC 电路网络,其中()i U t 为输入电压,安培表的指示电流)(t i o 为输出量。
试列写状态空间模型。
题图2-1解: (1) 根据回路电压和节点电流关系,列出各电压和电流所满足的关系式.()()()1()()()()()i L C L C R C C dU t L i t U t dtd i t i t i t C U t U t dt R =+=+=+(2) 在这个电路中,只要给定了储能R 元件电感L 和电容C 上的i L 和U C 的初始值,以及t ≥t 0时刻后的输入量U i (t ),则电路中各部分的电压、电流在t ≥t 0时刻以后的值就完全确定了。
也就是说,i L 和U C 可构成完整的描述系统行为的一组最少个数的变量组,因此可选i L 和为U C 状态变量,即x 1(t )=i L , x 2(t )=u C(3) 将状态变量代入电压电流的关系式,有122121111i dx x U dt L L dx x x dt C RC =-+=-经整理可得如下描述系统动态特性的一阶矩阵微分方程组--状态方程11i 22110110x x L U L x x C RC ⎡⎤-⎡⎤⎢⎥⎡⎤⎡⎤⎢⎥=+⎢⎥⎢⎥⎢⎥⎢⎥-⎢⎥⎣⎦⎣⎦⎣⎦⎢⎥⎣⎦(4) 列写描述输出变量与状态变量之间关系的输出方程,1221110C x y U x x R R R ⎡⎤⎡⎤===⎢⎥⎢⎥⎣⎦⎣⎦(5) 将上述状态方程和输出方程列写在一起,即为描述系统的状态空间模型的状态空间表达式11i 221211011010x x L U L x x C RC x y x R ⎡⎤-⎡⎤⎢⎥⎡⎤⎡⎤⎢⎥=+⎢⎥⎢⎥⎢⎥⎢⎥-⎢⎥⎣⎦⎣⎦⎣⎦⎢⎥⎣⎦⎡⎤⎡⎤=⎢⎥⎢⎥⎣⎦⎣⎦2-2 如题图2-2所示为RLC 电路网络,其中1()v t 为输入电压,2()v t 为输出电压。
试列写状态空间模型。
题图2-2解: (1) 根据回路电压和节点电流关系,列出各电压和电流所满足的关系式.1121d d d d d d d d C L L C C C L u i L R i C u t t u u u R C R i C t t ⎧⎛⎫+-=⎪ ⎪⎪⎝⎭⎨⎛⎫⎪+=- ⎪⎪⎝⎭⎩(2) 选择状态变量.状态变量的个数应为独立一阶储能元件(如电感和电容)的个数.对本题x 1(t )=i L , x 2(t )=u C(3) 将状态变量代入电压电流的关系式,经整理可得如下描述系统动态特性的一阶矩阵微分方程组--状态方程121121211122112121()()10()()R R R R R L R R L x x u L x x R R R C R R C --⎡⎤⎡⎤⎢⎥++⎡⎤⎡⎤⎢⎥⎢⎥=+⎢⎥⎢⎥⎢⎥⎢⎥-⎣⎦⎣⎦⎣⎦⎢⎥++⎣⎦(4) 列写描述输出变量与状态变量之间关系的输出方程,()11212111221212d d ()()C L x u R R R y u R i C R x Cx x t R R R R ⎡⎤⎡⎤⎛⎫==-=-=⎢⎥⎢⎥⎪++⎝⎭⎣⎦⎣⎦(5) 将上述状态方程和输出方程列写在一起,即为描述系统的状态空间模型的状态空间表达式121121211122112121121212121()()10()()()()R R R R R L R R L x x u L x x R R R C R R C x R R R y x R R R R --⎡⎤⎡⎤⎢⎥++⎡⎤⎡⎤⎢⎥⎢⎥=+⎢⎥⎢⎥⎢⎥⎢⎥-⎣⎦⎣⎦⎣⎦⎢⎥++⎣⎦⎡⎤⎡⎤=⎢⎥⎢⎥++⎣⎦⎣⎦2-3 设有一个弹簧-质量-阻尼器系统,安装在一个不计质量的小车上,如题图2-3所示。
u 和y为分别为小车和质量体的位移,k 、b 和m 分别为弹簧弹性系数、阻尼器阻尼系数和质量体质量阻尼器。
试建立u 为输入,y 为输出的状态空间模型。
题图2-3解:下面推导安装在小车上的弹簧-质量-阻尼器系统的数学模型。
假设0<t 时小车静止不动,并且安装在小车上面的弹簧-质量-阻尼器系统这时也处于静止状态(平衡状态)。
在这个系统中,()u t 是小车的位移,并且是系统的输入量。
当0t =时,小车以定常速度运动,即u = 常量。
质量的位移()y t 为输出量(该位移是相对于地面的位移)。
在此系统中,m表示质量,b 表示黏性摩擦系数,k 表示弹簧刚度。
假设阻尼器的摩擦力与yu - 成正比,并且假设弹簧为线性弹簧,即弹簧力与y u -成正比。
对于平移系统,牛顿第二定律可以表示为:ma F =∑式中,m 为质量,a 为质量加速度,F ∑为沿着加速度a 的方向并作用在该质量上的外力之和。
对该系统应用牛顿第二定律,并且不计小车的质量,我们得到:22()d y dy du m b k y u dt dt dt ⎛⎫=---- ⎪⎝⎭ 即: 22d y dy du m b ky b ku dt dt dt ++=+这个方程就是该系统的数学模型。
对这个方程进行拉普拉斯变换,并且令初始条件等于零,得到:)()()()(2s U k bs s Y k bs ms +=++取)()(s U s Y 与之比,求得系统的传递函数为:2()()()Y s bs kG s U s ms bs k +==++下面我们来求这个系统的状态空间模型。
首先将该系统的微分方程b k b k yy y u u m m m m ++=+与下列标准形式比较:1212o ya y a yb u b u b u ++=++ 得到:1b a m =, 2k a m =, 0o b =, 1b b m =,2k b m =即而得到:00111022211200b b b a mk b b a a m m ββββββ===-=⎛⎫=--=- ⎪⎝⎭并定义:102111x y u y b x xu x u m ββ=-==-=-可得到:1212222112212b xx u x u mk bk b xa x a x u x x u m m m m ββ=+=+⎡⎤⎛⎫=--+=--+-⎢⎥ ⎪⎝⎭⎢⎥⎣⎦输出方程为: 1y x =即:[]11222120110b xx m u k b x x k b mm m m x y x ⎡⎤⎡⎤⎢⎥⎡⎤⎡⎤⎢⎥⎢⎥=+⎢⎥⎢⎥⎢⎥⎢⎥--⎛⎫⎣⎦⎣⎦⎢⎥-⎣⎦⎢⎥⎪⎝⎭⎣⎦⎡⎤=⎢⎥⎣⎦2-4 题图2-4为登月舱在月球软着陆的示意图。
其中,m 为登月舱质量,g 为月球表面重力常数,m k -项为反向推力,k 为常数,y 为登月舱相对于地球表面着陆点的距离。
现指定状态变量组m x yx y x ===321 , 和 ,输入变量 m u = ,试列出系统的状态方程。
题图2-4解:本题属于由物理系统建立状态空间描述的基本题。
对给定力学系统,储能元件质量的相应变量即位置、速度和质量(本题中他也是随时间改变的),可被取为状态变量组m x yx y x ===321 , 和 。
基此,利用力学定律并考虑到输入变量mu =,先来导出 1223333xy x k gm g kx ym x u m m x x xm u ====-=-+==在将此方程组表为向量方程,就得到系统的状态方程:⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡-=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡1 0 0 0 0 0 00 1 033321321x k x g x x x x xx且由状态方程形式可以看出,给定力学系统为非线性系统。
2-5某磁场控制的直流电动机的简化原理图如题图2-5所示,其中电动机轴上的负载为阻尼摩擦,其摩擦系数为f ;电动机轴上的转动惯量为J 。
设输入为电枢电压u a 和激磁电压u f ,输出为电机转角θ,试列出系统的状态空间模型。
题图2-5解 设电动机的铁芯工作在非饱和区。
分析题图2-5所描述的电动机转速控制系统,可以写出电动机的主回路、励磁回路电压方程和轴转动运动方程为22d d d d d d a a a aff f f fu R i E i u R i L tM J ft t θθ=+=+=+式中,E a 和M 分别为如下电动机电枢电势和电动机转矩,且d d d d ae ef E C k i t t θθ=Φ=, m a m f a M C i k i i =Φ=式中,C e 和C m 分别为电动机的电枢电势常数和转矩常数;Φ为磁场的磁通量,其正比于励磁回路电流i f ;k e 和k m 分别为比例常数。
因此,主回路、励磁回路电压方程和轴转动运动可记为22d d d d d d d d aa a e f f f f f fm f a u R i k i ti u R i L t k i i J ft t θθθ⎧=+⎪⎪⎪=+⎨⎪⎪=+⎪⎩(2-13)对于上述微分方程组,若已知电枢电流i f (t )、角位移θ(t )及其导数t t /d )(d θ在初始时刻t 0的值,以及电枢电压u a 和励磁回路电压u f ,则方程组有惟一解。
因此,可以选择状态变量为123d ()()(),()(),()d f t x t i t x t t x t t θθ===因此,由微分方程组(2-13)可得系统的状态方程为112313313131---f f f f m m a e a a R x x u L L x x k k u k x x f f x x i x x x J J J R J ⎧=+⎪⎪⎪=⎨⎪⎛⎫-⎪== ⎪⎪⎝⎭⎩输出方程为y =θ=x 2由上述状态方程和输出方程可得系统的非线性状态空间模型为112323113321--f f f f m m e a a a R x x u L L x x k k k f x u x x x x JR JR J y x ⎧=+⎪⎪⎪=⎨⎪⎪=-⎪⎩=2-6 题图2-6为一化学反应器,它是一个均匀、连续流动单元,其中发生如下反应速率常数为k 的一级吸热反应A k→B该化工反应生产过程为:温度为常量θf,含A物质浓度为常量C Af的料液以Q(t)的流量进入反应器;假定流出的液体的流量也为Q(t),保持单元内液体体积为V;为了使化学反应向右进行,用蒸汽对反应器内的溶液进行加热,蒸汽加热量为q(t)。
试以料液的流量Q(t)和蒸汽加热量q(t)为输入,容器内的液体的温度θ(t)和物质B的浓度C B(t)为输出,建立状态空间模型。
题图2-6参见2.2小节例题2-7. 将以下系统输入输出方程变换为状态空间模型。