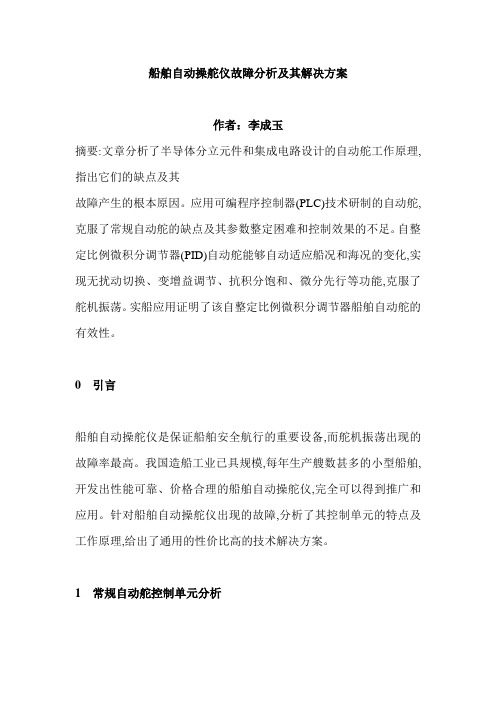
[例1-1]船舶驾驶舵角位置跟踪系统如例图1-1所示试分析
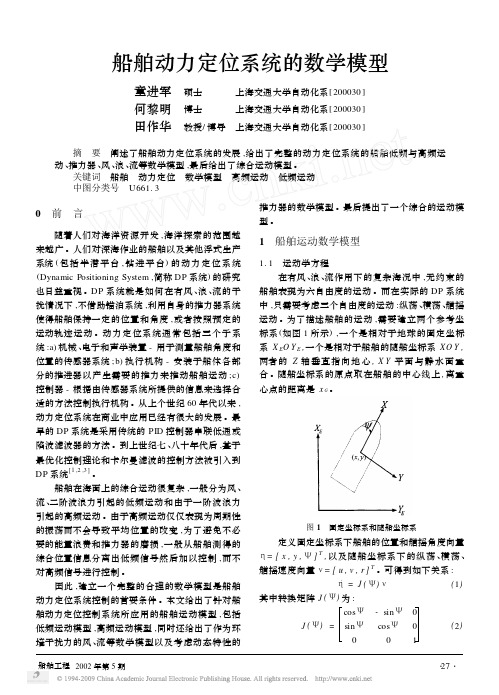
船舶动力定位系统的数学模型
control. Modeling , Identification and Control. 1980 , Vol.
1 ,No. 3 :135263. 3 Fung P T K , Grimble M J . Dynamic ship positioning using a
舶的数学模型 :
x = A x + B u + Eω
z = Hx +ν
(17)
式中
,
x
=
[
x
T L
,
x
T H
,
x
T c
,
x
T w
,τT
]T
为状态变量 ,
u
=
τL +τw 是输入向量 ,输出向量 z = [ z x , z y , zΨ , z ws ,
z w d ]分别表示船舶纵荡位置 、横荡位置 、艏摇角度 、
本文给出了针对船舶动力定位控制系统所应用的船舶运动模型包括低频运动模型高频运动模型同时还给出了作为环境干扰力的风流等数学模型以及考虑动态特性的固定坐标系和随船坐标系定义固定坐标系下船舶的位置和艏摇角度向量sinco船舶工程272002船舶低频运动模型根据文献可以得知船舶的低频运动模型为kw参数kw与海况有关表示波浪p2m将其转化为状态空间形式可得如下的高频运动模型rl表示低频速度向量用于描述船舶未建模的动态特性和扰动
风速和风向 。ν和ω都为零均值高斯白噪声 。
5 参考文献
1 T. Fossen. Guidance and control of ocean vehicles. New
舵布置位置对船舶操纵性影响试验研究1
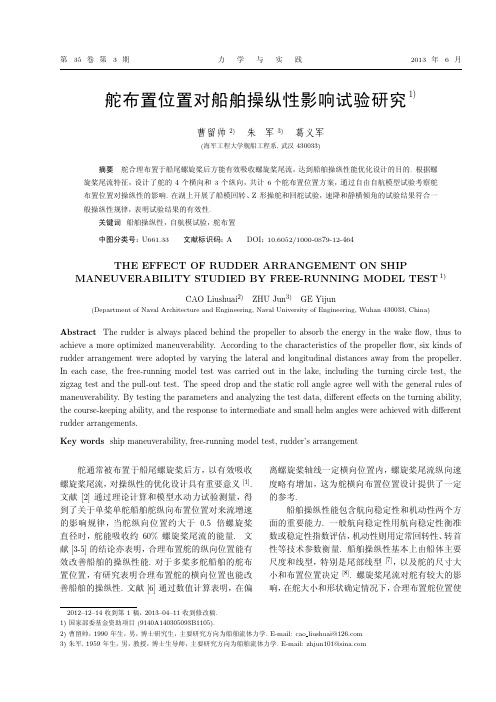
第35卷第3期力学与实践2013年6月舵布置位置对船舶操纵性影响试验研究1)曹留帅2)朱军3)葛义军(海军工程大学舰船工程系,武汉430033)摘要舵合理布置于船尾螺旋桨后方能有效吸收螺旋桨尾流,达到船舶操纵性能优化设计的目的.根据螺旋桨尾流特征,设计了舵的4个横向和3个纵向,共计6个舵布置位置方案,通过自由自航模型试验考察舵布置位置对操纵性的影响.在湖上开展了船模回转、Z形操舵和回舵试验,速降和静横倾角的试验结果符合一般操纵性规律,表明试验结果的有效性.关键词船舶操纵性,自航模试验,舵布置中图分类号:U661.33文献标识码:A DOI:10.6052/1000-0879-12-464THE EFFECT OF RUDDER ARRANGEMENT ON SHIP MANEUVERABILITY STUDIED BY FREE-RUNNING MODEL TEST1)CAO Liushuai2)ZHU Jun3)GE Yijun(Department of Naval Architecture and Engineering,Naval University of Engineering,Wuhan430033,China)Abstract The rudder is always placed behind the propeller to absorb the energy in the wakeflow,thus to achieve a more optimized maneuverability.According to the characteristics of the propellerflow,six kinds of rudder arrangement were adopted by varying the lateral and longitudinal distances away from the propeller. In each case,the free-running model test was carried out in the lake,including the turning circle test,the zigzag test and the pull-out test.The speed drop and the static roll angle agree well with the general rules of maneuverability.By testing the parameters and analyzing the test data,different effects on the turning ability, the course-keeping ability,and the response to intermediate and small helm angles were achieved with different rudder arrangements.Key words ship maneuverability,free-running model test,rudder’s arrangement舵通常被布置于船尾螺旋桨后方,以有效吸收螺旋桨尾流,对操纵性的优化设计具有重要意义[1].文献[2]通过理论计算和模型水动力试验测量,得到了关于单桨单舵船舶舵纵向布置位置对来流增速的影响规律,当舵纵向位置约大于0.5倍螺旋桨直径时,舵能吸收约60%螺旋桨尾流的能量.文献[3-5]的结论亦表明,合理布置舵的纵向位置能有效改善船舶的操纵性能.对于多桨多舵船舶的舵布置位置,有研究表明合理布置舵的横向位置也能改善船舶的操纵性.文献[6]通过数值计算表明,在偏离螺旋桨轴线一定横向位置内,螺旋桨尾流纵向速度略有增加,这为舵横向布置位置设计提供了一定的参考.船舶操纵性能包含航向稳定性和机动性两个方面的重要能力.一般航向稳定性用航向稳定性衡准数或稳定性指数评估,机动性则用定常回转性、转首性等技术参数衡量.船舶操纵性基本上由船体主要尺度和线型,特别是尾部线型[7],以及舵的尺寸大小和布置位置决定[8].螺旋桨尾流对舵有较大的影响,在舵大小和形状确定情况下,合理布置舵位置使2012–12–14收到第1稿,2013–04–11收到修改稿.1)国家部委基金资助项目(9140A140305093B1105).2)曹留帅,1990年生,男,博士研究生,主要研究方向为船舶流体力学.E-mail:cao liushuai@3)朱军,1959年生,男,教授,博士生导师,主要研究方向为船舶流体力学.E-mail:zhjun101@36力学与实践2013年第35卷其充分吸收螺旋桨尾流的速度也是改善船舶操纵性的有效措施.驱逐舰、护卫舰设计经验表明[9-12],舵合理外偏能减少约0.5倍定常回转直径,但是很少有研究阐述在改进回转性的同时对航向稳定性的影响.因此,有必要全面考察舵布置位置对船舶操纵性的影响.文章为了探究舵布置位置对船舶操纵性的影响,根据横向和纵向位置的变化,设计得到6个不同的舵位置情形,通过操纵性自由自航模型试验,分别对每种情形进行了回转试验、Z 形操纵试验和回舵试验,以确定舵布置位置的最佳方案,为总体设计提供参考依据.1舵布置位置设计方案本试验共设计了6个舵布置方案,各方案相对螺旋桨布置位置见图1.方案1∼方案6相对螺旋桨中心线布置位置尺寸见表1,其中D 为螺旋桨直径.图1舵布置位置示意图表1舵布置位置方案及其参数方案123456横向位置0.15D 0.30D 0.45D 0.30D 0.30D纵向位置1.36D 1.36D 1.36D 1.36D 1.16D 1.64D2自航模型试验概况模型试验在天然湖泊中进行,水域开阔,水面平整,水深满足试验条件(图2).试验模型船长约6m ,船体和附体材质为木质,附体有舭龙骨、呆木和螺旋桨支架、包套等.螺旋桨图2湖泊中自由自航模型试验模型材质为铅锡合金.轨迹记录采用GPS(global positioning system)定位系统,标称平面椭圆误差 2cm ;运动与航行姿态测量采用组合导航系统,方位角测量误差 0.1◦;舵机为数字式位置控制,精度为0.04◦.3舵布置位置对操纵性影响分析3.1试验内容本试验开展操纵性的3项实验:回转试验、Z 形操纵试验和回舵试验.每种情形分别在高速(F r=0.289)和低速(F r =0.174)两种速度下进行,测量记录的船舶运动量有:回转轨迹、航向角、回转角速度、横倾角、航速、舵角和螺旋桨转速等.图3为定常回转试验中速降与定常回转直径的关系,初始航速为高速.图中圆点为方案1∼方案6试验测量结果,曲线为拟合结果.图3表明试验结果符合一般速降与定常回转直径的关系.图4是方案4的操舵角δ=±10◦∼±35◦、初始航速为高速时,定常回转稳定横倾角和无量纲定常回转直径乘积(φ×D s )与稳定航速V s 的关系图线,其他方案结果与此一致.曲线表明各个方案的稳图3速降与无量纲定常回转直径关系曲线图4静横倾与定常回转航速关系曲线第3期曹留帅等:舵布置位置对船舶操纵性影响试验研究37定回转横倾角测量结果符合指数变化(图中回归曲线)规律,试验结果满足工程精度要求.图3和图4的结果表明,试验测量结果符合一般操纵性规律,离散度满足工程测量结果要求.3.2试验测量结果分析图5和图6分别为各个方案高速、低速满舵定常回转直径试验测量结果的对比.结果表明各个舵布置方案满舵无量纲定常回转直径在2.4左右;高速情况下方案1,2,5定常回转直径较小,低速情况方案2最小,低速方案1,3,5相当.除方案1,2略有不同外,高低速度各方案的满舵定常回转直径规律相似.图5高速满舵定常回转直径各方案对比图6低速满舵定常回转直径各方案对比图7为Z形试验的无量纲初转期ta各方案对比.高速情况下各方案无量纲初转期约有15%的变化范围,方案2,5,6相对较小,方案1,3偏大.低速情况下方案1,4,6无量纲初转期较其他方案小,约为1.25s.1957年野本[13]提出,对于航向稳定性的船,在操舵不是很频繁的情况下,可用一阶K和T方程式来描述船的转首响应T˙r+r=Kδ图7Z形操纵试验初转期各方案对比并说明了K和T指数的意义和用Z形试验来确定K和T的方法.图8为Z形试验的无量纲K 指数.低速和高速情况除方案1外有着基本相同的规律,方案4的K 指数最大.图9的无量纲T 指数与无量纲K 指数变化规律相同,符合K 大T 也大,K 小T 也小的一般规律.图8Z形操纵试验无量纲K 指数各方案对比图9Z形操纵试验无量纲T 指数各方案对比图10为回舵试验中各方案高速和低速的剩余角速度对比曲线.曲线表明低速情况下除方案1为航向稳定外,其余各方案均有不同程度的剩余角速度.高速情况下方案4,5有明显的剩余角速度存在,这一点与图9中稳定性指数T偏大具有一致性.38力学与实践2013年第35卷图10回舵试验剩余角速度各方案对比低速情形较高速情形航向稳定性普遍较差,除了船体本身的动力学特性差异外,还由于低速情形对风作用的敏感性,也正是这种敏感性使得试验更困难.高速情形下方案5不具有航向稳定性的原因,可能与舵过于靠近螺旋桨有关,舵过于靠近螺旋桨将导致流动的不稳定性,增强了舵处涡的分离和外泄.4结论本文设计了6个舵布置方案,通过自由自航模型试验开展了回转试验、Z 形操纵和回舵试验,测量了回转性和航向稳定性.通过对试验测量结果的对比分析,得到了舵布置位置与操纵性的关系,并得到如下结论:(1)高速情况下总体上具有航向稳定性,低速时不具有航向稳定性;(2)舵布置于螺旋桨正后方(方案1)和外偏0.30D 且近螺旋桨布置(方案5)的高速回转效果较好,高速满舵回转直径改善程度约20%;(3)靠近螺旋桨的舵纵向布置位置方案,其高速回转效果最好,但是航向稳定性相对较差;(4)综合考虑操纵性,舵横向布置位置选取在正对螺旋桨处,纵向位置可在现有方案1上适当减少与螺旋桨的间距.参考文献1International Towing Tank Conference (ITTC).The ma-neuvering committee,final report and recommendations to the 25th ITTC,Fukuoka,Japan,20082Okada S.Investigation on the effect of the propeller raceupon the performance of rudders:Hydrodynamical re-search of ship’s rudder—the third report.Stevens Institute of Technology,19593Mori M.Calculation of normal force of rudder behind pro-peller.Journal of the Kansai Society of Naval Architects ,1974,153:81-894Fujii H,Tuda T.Experimental research on rudder perfor-mance.Journal of Zosen Kiokai ,1961,110:31-425Yumuro A.Influences of propeller and rudder on maneu-vering stability derivatives.Journal of the Society of NavalArchitects of Japan ,1980,148:80-916王展智,熊鹰,齐万江等.船后桨的布局对螺旋桨水动力性能的影响.哈尔滨工程大学学报,2012,33(4):427-431(Wang Zhanzhi,Xiong Ying,Qi Wanjiang,et al.The effect of propeller arrangement behind the hull on propeller hydro-dynamic performance.Journal of Harbin Engineering Uni-versity ,2012,33(4):427-431(in Chinese))7曹留帅,朱军,黄昆仑.船舶呆木设计及对操纵性影响研究.中国舰船研究,2012,7(2):20-24(Cao Liushuai,Zhu Jun,Huang Kunlun.Design of the dead wood and its effect on ship maneuverability.Chinese Journal of Ship Research ,2012,7(2):20-24(in Chinese))8范尚雍,程智斌,吕韶康.高速双桨双舵船的船--桨--舵之间的水动力干扰.中国造船,1989,(2):27-34(Fan Shangy-ong,Cheng Zhibin,L¨u Shaokang.Hydrodynamic interac-tion between hull,propeller and rudder of high speed twin-screw,twin-rudders ships.Ship Building of China ,1989,(2):27-34(in Chinese))9朱军,庞永杰,徐玉如.规则波浪中船舶操纵运动计算.哈尔滨工程大学学报,2004,25(1):1-5(Zhu Jun,Pang Yongjie,Xu Yuru.Maneuvering prediction of a ship in regular waves.Journal of Harbin Engineering University ,2004,25(1):1-5(in Chinese))10范尚雍,朱军,程智斌.驱逐舰操纵性预报.中国造船,1990,(1):3-8(Fan Shangyong,Zhu Jun,Cheng Zhibin.Prediction of destroyer maneuverability.Ship Building of China ,1990,(1):3-8(in Chinese))11范尚雍,吕韶康,程智斌.双桨双舵船模系列斜拖试验研究.中国造船,1988,(1):38-47(Fan Shangyong,L¨u Shaokang,Cheng Zhibin.Oblique towing test results of a series of twin-screw,twin-rudder ship models.Ship Building ofChina ,1988,(1):38-47(in Chinese))12范尚雍,吕韶康.高速方尾船斜航状态的水动力试验研究和数值计算.水动力学研究与进展,1988,3(3):77-86(Fan Shangy-ong,L¨u Shaokang .Experiment study and numerical cal-culation of hydrodynamic forces and moments acting on the high speed transom stern ships running obliquely.Ad-vances in Hydrodynamics ,1988,3(3):77-86(in Chinese))13范尚雍.船舶操纵性.北京:国防工业出版社,1988(责任编辑:刘希国)。
船舶操纵系统图解

第一节 操纵系统概述
为了满足船舶在各种工况下的航行需要,将船舶主机的起动、换向和调速等各装置联结成一个 统一整体,并可集中控制的所有机构、设备和管路,总称为柴油机推进装置的操纵系统。
小型柴油机的推进装置,其起动、调速及换向系统的控制件距离近,通常分别设置,各自操纵。 近年来不少船舶也通过机械、气动等型式传输集中至机舱集控台或驾驶室,对推进装置集中操纵。 大、中型柴油机为操纵方便和工作可靠,都将各控制部分通过各种方式有机地联系以便集中控制和 远程控制。
一、对操纵系统的要求
在船舶柴油机中,操纵部分是最复杂的一部分,其部件多、零件杂、相互牵连制约,近代自动 化技术和遥控技术在操纵系统的应用,更增加了操纵系统的复杂程度。为了保证操纵系统能够可靠 地工作,对船舶柴油机的操纵系统有下列基本要求:
(1)必须能迅速而准确地执行起动、换向、变速和超速保护等动作,并能满足船舶规范上相 应的要求。
三、操纵系统和遥控系统的类型
1. 操纵系统的类型 按操纵部位和操纵方式,操纵系统可以分为: 1)机旁手动操纵:操纵台设置在柴油机旁边,使用相应的控制机构操纵柴油机,由轮机员直 接手动操纵,使之满足各种工况下的需要。 2)机舱集中控制室控制:操纵台设置在机舱适当部位的专用控制室内,由轮机员对柴油机实 现操纵和监视。 3)驾驶室控制:在船舶驾驶室内,专设主机遥控操纵台,由驾驶员直接操纵柴油机。 机旁手动操纵是操纵系统的基础,机舱集中控制和驾驶台控制均称为遥控,三者之间常设有转 换装置以便随意转换。每种操纵台上均设操纵手柄,操纵部位转换开关、应急操作按钮及各种显示 仪表,以便对主机进行操纵和运行状态的监视。尽管目前主机遥控技术已经达到了相当高的水平, 但系统中仍然必须保留机旁手动操纵系统,以保证对主机的可靠控制。 2.遥控系统的类型 遥控系统是用逻辑回路和自动化装置代替原有的各种手动操作程序。按遥控系统所使用的能源 和工质,主机遥控系统可分为: 1)电动式遥控系统:以电作为能源,通过电动遥控装置和电力驱动装置对主机进行远距离操 纵。 该系统控制性好,控制准确,遥控距离不受限制,有利于远距离控制;设备简单,不需要油、 气管路,无油、气处理装置,不必担心漏油、漏气;易实现较高程度的自动化,是实现主机遥控的 最佳途径。缺点是管理水平要求高,故障不易发现,操作管理人员要具备一定的电子技术知识。 2)气动式遥控系统:以压缩空气为能源,通过气动遥控装置和气动驱动装置对主机进行远距 离操纵。 气源可直接由起动空气经减压、净化得到,信号传递距离较远,一般在 100 米以内可满足系统 的控制要求,信号受电气、振动、温度等干扰少,动作可靠,故障容易发现,维修方便。但该系统 气源净化品质要求高,需除水、除油、除尘,否则易使气动元件失灵。 3)液力式遥控系统:以油泵产生的压力油作为能源,通过液压阀件和液动机构进行控制。
浅析船舶动力定位系统的组成及应用
浅析船舶动力定位系统的组成及应用发布时间:2022-12-19T07:56:40.231Z 来源:《科技新时代》2022年12期作者:陈龙韩朋刚刘欢蒙亚东只升震[导读] 船舶动力定位是在船舶需要定在某一坐标点时不在需要传统的定位锚机来固定,而是依靠一定的参考系统,如DGPS、罗经等,利用船舶自身的动力可以自动的维持在地球上的某一坐标点,这时DP控制系统依靠参考系统反馈回来的位置信息,风和流信息以及外力的信息,自动去控制主推进器,舵机,侧推等动力设备,维持在这个设定坐标点,这就是动力定位的简单解释。
(安装公司海洋石油202船)摘要:船舶动力定位是在船舶需要定在某一坐标点时不在需要传统的定位锚机来固定,而是依靠一定的参考系统,如DGPS、罗经等,利用船舶自身的动力可以自动的维持在地球上的某一坐标点,这时DP控制系统依靠参考系统反馈回来的位置信息,风和流信息以及外力的信息,自动去控制主推进器,舵机,侧推等动力设备,维持在这个设定坐标点,这就是动力定位的简单解释。
由于动力定位船舶的机动性、高效性,动力定位系统被广泛应用于海底管线检修,海洋电缆铺设、海洋石油平台守护、海洋钻井船、水下机器人跟踪、海底管线埋设等。
本文对工程船舶动力定位系统组成及作用进行分析。
关键字:动力定位参考系统自动控制工程船舶Abstract:This article is mainly about the Dynamic Position System, this system is different from the traditional position winch system. It depend on the DGPS, Gyro, Reference system, using the ship’s own ability hold a set position. The DP control system using the Reference system, calculate the external result forces, automatic control the thrusters, rudders to generate a opposite force, in order to keep the DP Ship positioning .Because of the better flexible and maneuvering, The DP control system is used more and more in the Marine Engineering construction. This article is mainly about the Dynamic Position System and the function.Key Words: Dynamic Position Reference System Automatic Control Engineering Ship1.动力定位系统工作原理的简单介绍20世纪60年代,随着海洋石油开发的需求,动力定位概念开始出现,美国Honewell公司将动力定位系统于1961年应用于第一条动力定位船舶CUSS1;近年来,随着海洋石油逐步走向深蓝,国际上各海洋石油公司发展目标、战略重心逐步转向深海领域;在海洋工程船舶的投资发展方向都是动力定位船舶,而动力定位系统是必不可少的利器。
精品文档-自动控制原理(李素玲)-第1章

21
(5)执行元件:其职能是直接推动被控对象,使其被控 量发生变化。用来作为执行元件的有阀门、电动机、液压电 动机等。
(6)校正元件:也叫补偿元件,它是结构或参数便于调 整的元部件,用串联或并联(反馈)的方式连接于系统中,以 改善系统的性能。最简单的校正元件是电阻、电容组成的无 源或有源网络,复杂的则可用计算机构成数字控制器。
17
(6)反馈量:由系统输出端取出并反向送回系统输入端 的信号。反馈有主反馈和局部反馈之分。
(7)偏差量:给定量与主反馈信号之差。 (8)自动控制系统:由被控对象和控制器按一定方式连 接起来的、完成一定自动控制任务的有机整体。
18
1.2.2 自动控制系统的基本组成 自动控制系统根据被控对象和具体用途的不同,可以有
各种不同的结构形式。但是,从工作原理来看,自动控制系 统通常是由一些具有不同职能的基本元件所组成。图1-3所 示为典型的反馈控制系统的基本组成,图中各元件的职能如 下:
19 图1-3 反馈控制系统的基本组成
20
(1)给定元件:其职能是给出与期望的被控量相对应的 系统输入量。给定元件一般为电位器。
24 图1-4 开环直流调速系统
25 图1-5 开环直流调速系统方框图
26
图1-4中开环系统的输入量是给定电压ug,输出量是转 速n。电动机励磁电压为常数,采用电枢控制方式。调整给 定电位器滑臂的位置,可得到不同的给定电压ug,放大后得 到不同的电枢电压ua,从而控制电机转速n。当负载转矩不变 时,给定电压ug与电机转速n有一一对应关系。因此,可由给 定电压直接控制电动机转速。如果出现扰动,如负载转矩增 加,电动机转速便随之降低而偏离要求值。
10
1.人工控制 如图1-1所示为人工控制水位保持恒定的供水系统。水 池中的水源源不断地经出水管道流出,以供用户使用。随着 用水量的增多,水池中的水位必然下降。这时,若要保持水 位高度不变,就得开大进水阀门,增加进水量以作补充。因 此,进水阀门的开度是根据实际水位的多少进行操作的。上 述过程由人工操作实现的正确步骤是:操作人员首先将要求 水位牢记在大脑中,然后用眼睛和测量工具测量水池的实际 水位,并将实际水位与要求水位在大脑中进行比较、计算, 从而得出误差值;再按照误差的大小和正负性质,由大脑指 挥手去调节进水阀门的开度,使实际水位尽量与要求水位相 等。
船舶操纵---舵的种类、舵的效应及侧推器对船舶的影响

侧推器及其效应
• 船舶后退中侧推 器效应 • 首侧推器的转船 力矩要大得多, 其转船效果要比 尾侧推器好很多
舵的种类
• 半平衡舵
– 舵宽和舵高的一部分分布在 舵轴之前; – 这种舵的性能介于普通舵和 平衡舵之间。
舵的种类
• 按照舵抛面的结构分类:
– 平板舵; – 流线型舵; – 特种舵。
• 按照舵的支撑结构分类:
– 多支撑舵; – 双支撑舵; – 半悬挂舵 – 悬挂舵等等。
舵的几何要素
• 舵面积(AR )
– 舵面积比(A R / L pp d)
舵轴线
• 展弦比 (λ): • 舵平衡系数(k)
h
br
br 4
tr
Λ
1 / 4 弦线
b
bt 4 bt
tt
舵的几何要素
• 舵面积(AR )
– 舵的外形轮廓所包围的面积 – 一般用舵面积比(A R / L pp d)来考察舵对船舶操 纵性的影响。。
• 展弦比 (λ):
侧推器及其效应
• 船舶前进中侧推器效应
– 尾侧推器的效应 – 单独使用尾侧推器时,水动力中心逐渐向前移动,力 偶臂逐渐变长,虽然有效推力逐渐降低,但与首侧推 器比较,有效侧推力相同时,尾侧推器的转船力矩要 大得多,其转船效果要比首侧推器好很多; – 故船舶前进中应使用尾侧推器来调整航向; – 随着船速的增加,尾侧推器也有失效的问题,这种失 效不是由于力偶臂的减小引起的,而是由尾侧推器附 近的流态造成的。
船尾舵的性能
• 船舶旋回中的舵力 降低
– 旋回中的降速,导致 舵处的来流速度下降, 舵力下降; – 旋回中舵处的有效冲 角减小(即有效舵角 δ α 减小)。
VG Va
船舶自动操舵仪故障分析及其解决方案
船舶自动操舵仪故障分析及其解决方案作者:李成玉摘要:文章分析了半导体分立元件和集成电路设计的自动舵工作原理,指出它们的缺点及其故障产生的根本原因。
应用可编程序控制器(PLC)技术研制的自动舵,克服了常规自动舵的缺点及其参数整定困难和控制效果的不足。
自整定比例微积分调节器(PID)自动舵能够自动适应船况和海况的变化,实现无扰动切换、变增益调节、抗积分饱和、微分先行等功能,克服了舵机振荡。
实船应用证明了该自整定比例微积分调节器船舶自动舵的有效性。
0引言船舶自动操舵仪是保证船舶安全航行的重要设备,而舵机振荡出现的故障率最高。
我国造船工业已具规模,每年生产艘数甚多的小型船舶,开发出性能可靠、价格合理的船舶自动操舵仪,完全可以得到推广和应用。
针对船舶自动操舵仪出现的故障,分析了其控制单元的特点及工作原理,给出了通用的性价比高的技术解决方案。
1常规自动舵控制单元分析1)半导体分立元件自动舵。
半导体分立元件正常工作需要一定的条件,若超出其允许的范围,将不能正常工作,甚至造成永久性的破坏。
对于大功率管的功耗能力并不服从等功耗规律,其工作电压升高,其耗能功率相应减小。
三极管在工作时,可能Uce并未超过BUceo,Pc也未达到Pcm,而三极管已被击穿损坏了。
因此,使用半导体模拟元件要考虑di/dt、du/dt的影响,即使在其允许工作范围内也可能造成损坏。
特别是外延型高频功率管,在使用中要防止二次击穿。
元器件老化、特性飘移,引起性能下降、工作不稳定,故障率最高。
2)集成电路设计的自动舵。
集成电路与分立元器件组成的电路相比,具有体积小、功耗低、性能好、重量轻、可靠性高、成本低等许多优点。
但同样对电源电压、温度、湿度等外界因素变化敏感,其内部又存在固有噪声,这些将引起回路特性和参数变化,降低其稳定性和可靠性。
其功能扩展困难,难以调试,不能在线修改和故障诊断,对制作工艺要求很高。
故障分析和排除十分困难。
3)舵机振荡出现的几率最高。
船舶轴系及舵系中心线定位实践
( 原 设 计 两 线 之 问 有 一 定 夹 角 , 样 可 能 偏 离设 计 值 ) 因 此 在 确 如 同 。 定 艏 艉 基 准 点 高 度 时 , 能 以 船 体 艉 部 构 件 作 为 参 考 点 , 该 把 船 不 应 体 中 部 平 直 部 分 的 基 线 延 长 至船 艉 部 , 此 延 长 线 为依 据 向 上 量 取 以
取 h 在 S 上 对 应 点 到 靶 位 A距 离 为 d ( 际 上 d z 线 实 要 大 于 d. 了 为
使 船 艉 图 示 清 晰 , 船 艉 部 放 大绘 制 , 以 d 与 d不 成 比 例 ) 根 据 把 所 . , h、 d便 可 确 定 基 线 延 长 线 与 靶 位 A之 交 点 b 线段 a = :k d在 k、 。 b h一 x , 靶 位 A 上 从 a点 向上 量 取 线 段 a , 定 船 体 基 线 延 长 线 与 靶 位 A交 b确 点 b 线 段 b = 设 计 轴 系 中 心线 高 度 )T( 板 龙 骨 厚 度 )c点 ( 。 c H( + 平 , 左 右 位 置 按 常 规 定 位 ) 为轴 系 中 心 线 后 基 准 点 ( 段 b 即 线 c长 度 由 于 船 舶 基 线 斜 率 K 的 影 响 ,将 使 所 确 定 的 轴 系 中心 线 高 度 稍 低 于 设 计 值 , 差 约 为 K H, 量 取 时应 酌 情 增 加 该 误 差 值 ) 艏 基 准 点 靶 位 误 x 在 。 B设 在 主机 自由端 前 l一 #肋 位 。把 后 基 准点 c水 平 移 植 到 艏 基 准 }2 } 点 靶 位 , 量 艏艉 基 准 点 水平 距 离 L及 根 据 基 线 斜 率 K, 艏 基 准 点 测 在 靶 位 上 , 水 平 移 植 得 到 的 点 为 基 础 向 上 量 取 L K, 可 确 定 艏 基 以 x 即 准 点 c( 右位 置 按 常规 定 位 )cc连线 即 为 轴 系 中 心 线 。c点 在 高 左 , 度 方 向 的 确 定 同样 不 能 按 相 关 技 术 书 籍 所 述 以 双 层 内底 板 或 外 板
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
例1-1 续1
如果操纵杆角θ i 改变了,而船舵仍处于原位,则电位器 u 输出u e ≠ 0,e 经放大后使电动机通过减速器连同船舵和输出 电位计滑臂一起作跟随θ i 给定值的运动。当 θ o = θ i 时,电动 机停转,系统达到新的平衡状态,从而实现角位置跟踪的 目的。 由上分析可见,操纵杆是输入装置,电位计组同时完 成测量和比较功能,电压、功率放大器完成调节器工作, 电动机和减速器共同起执行器的作用。 系统的原理方块图如下:
θi
操纵杆
−
电位 器组
电压 放大器
功率 放大器
θo
电动机 减速器 船舵
[例1-2]:
+
ug
功 放
+
扰动负载
n
ua
图 -
M
ug
功放
ua
电动机
n
-
方块图 ug n 扰动 电动机 ua 负载 扰M
电动机 动机 n=n1 n=n1+
工作原理: 电 ug 功 放
ua n 电动机 n 负载 ug n 扰动
ua 动电 ug=ug1 ——
[例1-1]船舶驾驶舵角位置跟踪系统如例图1-1所示。试分 析其工作原理,并画出系统方块图。
θo θi
电位计组 接操 纵杆 + − + 反馈连接
−
电压 u e 放大器 + 功率 放大器
−
船舵
电动机
减速器
[解]:该系统的任务是船舶舵角位置 θ o跟踪操纵杆角位 置θ i 。被控对象是船舵,被控量(输出量)是船舵的角位 置 o ,给定量(输入量)是操纵杆角位置。理想跟踪情况 θ θo 下, = θ i,两环形电位计组成的桥式电路处于平衡状态, 输出电压u e = 0,电动机不转。系统相对静止。
道路
大脑
手和方向盘 眼和大脑
驱动机构
车体
路线
该系统中,输入量是道路信息,输出量是实际的行 车路线。大脑是控制器,手、方向盘和驱动机构是执行 元件,车体是被控对象。眼和大脑作为反馈装置。
ug = ug1
[例1-2] 续: “转速控制系统”之“闭环控制系统”
+
ug较 点比Fra bibliotekue放
功
ua
n
M
ug
-
ue
ua
测速装置
n
测速装置
uf
工作原理:
n , uf , 系统 转速
ue = ug − uf
,n
ue
道路正确驾驶的反馈过程。
[例1-3]: 用原理方块图表示司机沿给定路线行驶时观察
司机根据眼睛观察到的汽车行驶路线、障碍物和汽 车的前进方向,估计汽车的前进路线。再由实际道路与 估计的前进路线的差距指挥手来操纵方向盘,以使汽车 正确地沿道路前进。原理方块图如下: 实际