哈工大遥感图像配准报告
遥感图像配准
1.实习目的:遥感图像的配准2.实习内容:2.1掌握ENVI自定义坐标,以及基于地形图的遥感影像配准过程。
2.2本次实习中带有地理坐标的西安市城区地形图被用作基准影像,对资源三号全色影像进行配准。
在此基础上,以纠正后的全色影像为基准,校正资源三号多光谱影像,用于下节的图像融合。
3.实习步骤:3.1 基于地形图配准全色影像的具体操作步骤:3.1.1 打开并显示资源三号全色影像与地形图1)从ENVI主菜单中,选择File → Open Image File。
加载地形图文件和全色影像到可用波段列表Available Bands List中;2)点击Load RGB将地形图加载到显示窗口display#1;3)在可用波段列表Display #1下拉菜单,点击New Display按钮,并从下拉式菜单中选择New Display。
点Load RGB按钮,将全色影像加载到一个新的显示窗口display#2。
3.1.2 修改地形图头文件中的地图信息由于地形图为西安80坐标系,而ENVI系统自带的投影文件中并没有相关基准面和椭球体,因此打开的地形图无法正确显示地图信息Map Info;1)定义椭球体,进入ENVI安装目录:C:\Program Files\ITT\IDL71\products\envi47\ map_proj,打开椭球体文件ellipse.txt,在最后一行增加IAG-75,6378140.0, 6356755.3;2)定义基准面,在相同的目录,打开基准面文件datum.txt文件,在最后一行增加D_Xian_80,IAG-75,0,0,0;3)在可用波段列表中,右键点击地形图文件,选择Edit Header,从弹出的窗口的EditAttributes的下拉箭头中选择Map Info,进入Edit Map Information。
输入图像左上角XY 坐标与像素大小;选择Change Proj,新建投影,输入相关参数3.1.3影像配准1)从ENVI主菜单栏中,选择Map → Registration → Select GCPs: Image to Image;2)在Image to Image Registration对话框中,点击并选择Display #1 (地形图),作为BaseImage。
遥感原理与应用实验报告
《遥感原理与应用》课程Remote Sensing Principle and Application黑龙江工程学院·测绘工程学院2016年10月目录实验一ENVI软件安装与基本功能操作 (3)实验二影像的地理坐标定位和校正 (18)实验三图像融合、镶嵌、裁减 (28)实验四遥感图像分类 (35)加载一幅灰阶影像链接两个显示窗口:图2-1:Interactive Stretching对话框图2-2:ENVI Color Tables对话框图2-4:Cursor Location/Value对话框,显示了所选像素的屏幕值和数据值2.要关闭该对话框,从对话框的下拉菜单中,选择File →Cancel。
交互式的滤波处理ENVI给用户提供了对影像显示窗口进行一些预定义或者自定义的滤波处理的能力(对文件进行滤波处理也可以达到这种效果,它可以通过ENVI主菜单中的Filter 菜单来访问)。
下面的例子将展示如何对主影像窗口中的影像进行预定义的滤波处理。
选择滤波1.从主影像窗口菜单栏中,选择Enhance →Filter,并从下拉菜单中,选择所需的滤波类型,然后将该滤波应用到所显示的影像上。
2.尝试对所显示的影像进行不同的锐化、平滑和中值滤波。
在第二个显示窗口中打开影像并应用不同的滤波1.从可用波段列表对话框底部的下拉菜单中,选择Display #1 →New Display5-4:输出影像地图的Output Display to Postscript)如果有一个大比例的绘图仪,那么将Page页大小改为绘图大小,缩放的影像Postscript文件,该文件能按比例直接绘制在绘图仪上。
注意:只有在能打印彩色输出,并且能使用操作系统标准程序来打印输出文件的前提下,才能创建Postscript文件。
,保存postscript打印设置。
如果不能打印彩色输出,点击5-6:影像到影像配准中所用的Image to Image GCP LIst图5-7:Registration Parameters对话框bldr_tm1.wrp,点击OK。
遥感图像几何精纠正实验报告

一、实验名称遥感图像几何精纠正二、实验目的理解几何校正的原因,几何校正的原理,掌握用ENVI对影像进行几何校正的方法;了解整个实验的过程以及实验过程中要注意的事项。
三、实验原理由各种内外因素造成的遥感图像几何位置上的变化称为几何畸变,消除或者减弱其影响的过程即几何校正的过程。
试验中主要是通过若干控制点,建立不同图像间(基准影像和待纠正影像)的多项式空间变换和像元插值运算,实现遥感图像与实际地理图件间的配准 ,达到消减以及消除遥感图像的几何畸变。
几何校正又可分为影像到影像及影像到地图的配准。
四、数据来源本次实验所用数据来自于国际数据服务平台;landsat4-5波段30米分辨率TM 第三波段影像,投影为WGS-84,影像主要为山西省大同市恒山地区,中心纬度:38.90407 中心经度:113.11840。
五、实验过程1、打开并显示Landsat TM 影像文件1)打开并显示TM影像文件,从ENVI 主菜单中,选择File →Open Image File选择影像,点击Load Band 在主窗口加载影像。
2)新建主窗口,加载待校正影像(原图像偏转90度后所形成图像)。
《遥感数字图像处理》实验报告学号:姓名:邢晓辉(cuit)2、选取并处理地面控制点1)从ENVI 主菜单栏中,选择Map →Registration →Select GCPs: Image to Image,打开Image to Image Registration 对话框。
2) 在Image to Image Registration 对话框中,点击并选择Display #1 (SPOT 影像),作为Base Image。
点击Display #2(TM 影像),作为Warp Image。
3)点击OK,启动配准程序。
通过将光标放置在两幅影像的相同地物点上,来添加单独的地面控制点,在每个缩放窗口所需位置上,点击鼠标左键,调整光标点所处的位置。
遥感图像几何精校正实验报告
遥感图像几何精校正实验名称:遥感图像的几何精校正。
实验目的:1.了解和熟悉envi软件的几何校正的原理2.熟悉和掌握envi软件的几何校正的功能和使用方法;3.对自己的图像先找到投影,再另存一幅图像,去掉投影,在其它软件中旋转一角度,用原先的图像作为参考对旋转后的图像进行几何校正,使得其比较精确。
实验原理:几何校正,主要方法是采用多项式法,机理是通过若干控制点,建立不同图像间的多项式控件变换和像元插值运算,实现遥感图像与实际地理图件间的配准,达到消减以及消除遥感图像的几何畸变。
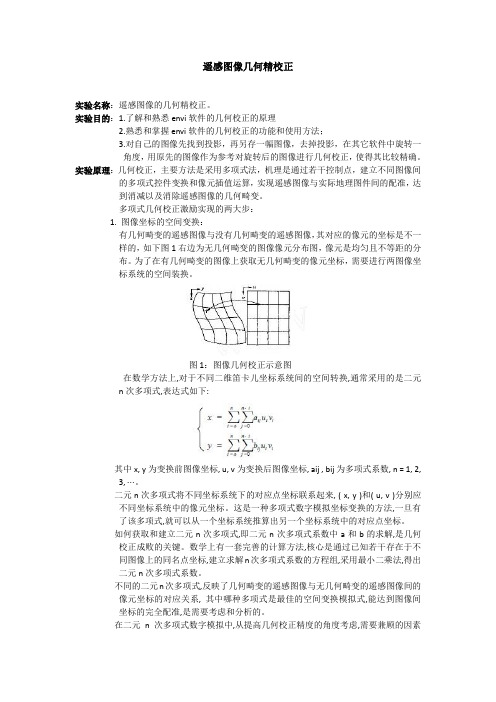
多项式几何校正激励实现的两大步:1. 图像坐标的空间变换:有几何畸变的遥感图像与没有几何畸变的遥感图像,其对应的像元的坐标是不一样的,如下图1右边为无几何畸变的图像像元分布图,像元是均匀且不等距的分布。
为了在有几何畸变的图像上获取无几何畸变的像元坐标,需要进行两图像坐标系统的空间装换。
图1:图像几何校正示意图在数学方法上,对于不同二维笛卡儿坐标系统间的空间转换,通常采用的是二元n次多项式,表达式如下:其中x, y为变换前图像坐标, u, v为变换后图像坐标, aij , bij为多项式系数, n = 1, 2,3, ⋯。
二元n次多项式将不同坐标系统下的对应点坐标联系起来, ( x, y )和( u, v )分别应不同坐标系统中的像元坐标。
这是一种多项式数字模拟坐标变换的方法,一旦有了该多项式,就可以从一个坐标系统推算出另一个坐标系统中的对应点坐标。
如何获取和建立二元n次多项式,即二元n次多项式系数中a和b的求解,是几何校正成败的关键。
数学上有一套完善的计算方法,核心是通过已知若干存在于不同图像上的同名点坐标,建立求解n次多项式系数的方程组,采用最小二乘法,得出二元n次多项式系数。
不同的二元n次多项式,反映了几何畸变的遥感图像与无几何畸变的遥感图像间的像元坐标的对应关系, 其中哪种多项式是最佳的空间变换模拟式,能达到图像间坐标的完全配准,是需要考虑和分析的。
图像配准实验报告
图像配准实验报告图像配准实验报告引言:图像配准是计算机视觉领域的重要研究方向,它涉及将多个图像或视频序列对齐以实现对比分析。
图像配准技术在医学影像、遥感图像、计算机图形学等领域具有广泛的应用。
本实验旨在探究不同配准算法在图像配准任务中的效果和性能。
一、实验背景图像配准是指将不同图像或图像序列的特定特征点对齐,使它们在空间上保持一致。
图像配准可分为刚体变换、仿射变换和透视变换等不同类型,具体方法包括特征点匹配、直接法和基于优化的方法等。
本实验选取了常用的特征点匹配方法进行研究。
二、实验过程1. 数据准备从开源数据集中选取了一组包含平移、旋转和缩放等不同变换的图像。
这些图像包含了不同场景和角度,以模拟实际应用场景。
2. 特征提取与匹配采用SIFT(尺度不变特征变换)算法提取图像的特征点。
SIFT算法通过检测图像中的关键点,并计算每个关键点的特征描述子。
接着使用FLANN(快速最近邻搜索库)进行特征点匹配。
FLANN算法能够高效地在大规模数据集中进行最近邻搜索,提高了匹配的准确性和速度。
3. 图像配准基于特征点匹配结果,采用RANSAC(随机抽样一致性)算法估计图像之间的变换矩阵。
RANSAC算法通过随机选择特征点子集,估计出最佳的变换模型,排除了异常点的干扰。
4. 实验结果评估使用均方差(MSE)和结构相似度指数(SSIM)等指标对配准结果进行评估。
MSE用于衡量图像之间的差异,SSIM则考虑了亮度、对比度和结构等因素,更适合图像质量评估。
三、实验结果与讨论经过特征提取和匹配,我们得到了一系列图像配准的结果。
通过计算MSE和SSIM指标,我们对不同配准算法的性能进行了比较。
1. 刚体变换配准刚体变换是一种刚性的平移、旋转和缩放变换。
通过对特征点进行刚体变换配准,我们得到了较好的配准结果。
MSE和SSIM指标表明,刚体变换配准在保持图像结构和内容一致性方面表现出色。
2. 仿射变换配准仿射变换是一种保持直线和平行性质的变换。
《遥感图像处理》实验报告模版

《遥感图像处理A》
实验报告
学期13- 14学年第2学期
专业
班级
学号
姓名
任课教师
苏州科技学院
环境科学与工程学院
实验报告1 ERDAS Viewer的使用实验地点日期
一、目的
二、要求
三、方法与详细步骤
四、实验成果
实验报告2 卫星影像及航空影像的几何校正
实验地点日期
一、目的
二、要求
三、方法与详细步骤
四、实验成果
实验报告3 雷达图像的几何纠正实验地点日期
一、目的
二、要求
三、方法与详细步骤
四、实验成果
实验报告4 空间增强处理与辐射增强处理
实验地点日期
一、目的
二、要求
三、方法与详细步骤
四、实验成果
实验报告5 傅立叶变换实验地点日期
一、目的
二、要求
三、方法与详细步骤
四、实验成果
实验报告6 彩色增强与图像运算实验地点日期
一、目的
二、要求
三、方法与详细步骤
四、实验成果
实验报告7 多光谱增强实验地点日期
一、目的
二、要求
三、方法与详细步骤
四、实验成果
实验报告8 非监督分类实验地点日期
一、目的
二、要求
三、方法与详细步骤
四、实验成果
实验报告9 监督分类实验地点日期
一、目的
二、要求
三、方法与详细步骤
四、实验成果
实验报告10 空间建模与实践实验地点日期
一、目的
二、要求
三、方法与详细步骤
四、实验成果
11。
哈工大数字图像处理实验报告(共10篇)
哈工大数字图像处理实验报告(共10篇) 数字图像处理实验报告实验报告书实验类别数字图像处理学院信息工程学院专业通信工程班级通信1005班姓名叶伟超指导教师聂明新2013 年 6 月 3 日篇二:数字图像处理实验报告(全部)数字图像处理实验指导书125 200912512 班级:学号:姓名:田坤专业:电子信息科学与技术实验一数字图像的运算一.实验目的1.熟悉matlab图像处理工具箱及直方图函数的使用;2.理解和掌握直方图原理和方法;二.实验设备:1.PC机一台;2.软件matlab。
三.程序设计在matlab环境中,程序首先读取图像,然后调用直方图函数,设置相关参数,再输出处理后的图像。
I=imread('cameraman.tif');%读取图像subplot(1,2,1),imshow(I)%输出图像title('原始图像') %在原始图像中加标题subplot(1,2,2),imhist(I) %输出原图直方图title('原始图像直方图') %在原图直方图上加标题四.实验步骤1. 启动matlab双击桌面matlab图标启动matlab环境;2. 在matlab命令窗口中输入相应程序。
书写程序时,首先读取图像,一般调用matlab自带的图像,如:cameraman图像;再调用相应的直方图函数,设置参数;最后输出处理后的图像;3.浏览源程序并理解含义;4.运行,观察显示结果;5.结束运行,退出;五.实验结果:观察图像matlab环境下的直方图分布。
(a)原始图像(b)原始图像直方图六.实验报告要求1、给出实验原理过程及实现代码:I=imread('coins.png');%读取图像subplot(1,2,1),imshow(I)%输出图像title('原始图像') %在原始图像中加标题subplot(1,2,2),imhist(I) %输出原图直方图title('原始图像直方图') %在原图直方图上加标题2、输入一幅灰度图像,给出其灰度直方图结果,并进行灰度直方图分布原理分析。
实验二遥感图像的几何校正与镶嵌实验报告
实验二遥感图像的几何校正与镶嵌实验报告实验目的:通过本实验熟练操作遥感图像处理的专业软件进行基础图像处理,包括图像几何校正、镶嵌等。
实验容:1、熟悉图像几何校正、镶嵌的基本原理;2、学习图像几何校正具体操作;3、学习图像镶嵌正具体操作。
本实验的图像几何校正是通过“像图配准”的方式获取地面控制点的方里网坐标的,并对传统的从纸质地形图上量算坐标的方法进行改进,利用Auto CAD或Photoshop等软件从扫描后的电子地形图上直接量算坐标。
实验步骤:第一步、熟悉图像几何校正、镶嵌的基本原理第二步、图像几何校正运行PCI,选择GCPWorks模块,在Source of GCPs选择User Entered Coordinates(用户输入投影坐标系统),点击Accept后,弹出校正模块:选择第一项加载需要校正的图像(由实验一方法导出的125-42.pix)->点击Default->Load & Close->得到下图:选择第二项,选择Other确定投影系统:注意输入6度带的中央经度与向东平移500公里(500000米):点击Earth Model确定地球模型:点击Accept:选择第三项采集地面控制点。
在采集地面控制点之前,利用Photoshop软件打开扫描后的电子地形图。
分别在遥感图像和地形图中找到一个同名点,如下图(可以用放大遥感图)。
然后在地形图中量算出该点的坐标,精确到米,X坐标为6位(要去掉2位6度带的带号),Y坐标7位(运用测出)。
再将坐标输入到GCP编辑窗口中,并点击Accept as GCP接受为一个控制点。
用同样的方法采集更多的地面控制点。
注意:前三个点不显示误差,从第四个点开始才出现误差。
一般要求选择15个以上控制点,并且各点的误差<1个像元,将误差过大的点删除,直到误差<1个像元为止。
最后,关闭GCP编辑窗口,选择第五项(如果对整个图像进行几何校正,则第四项可以省略),执行几何校正。
多时相遥感图像配准实验报告
Harbin Institute of Technology多时相遥感图像配准实验报告课程名称:遥感信息处理导论院系:电子与信息工程学院姓名:学号:授课教师:哈尔滨工业大学1. 实验目的对于通过遥感平台获取的遥感数字影像,由于扫描过程中受地球曲率、地球自转、平台姿态、扫描方式等因素的影响,所获取的图像往往会产生不同程度的几何误差,这些误差如若不经处理,对图像的后续应用如分类、目标检测等会产生很大影响。
本实验的目的就是利用多项式映射和重采样等方法对两幅不同时间采集的遥感图像进行几何校正处理,从而方便从配准图像中找到不同时相内发生变化的地物目标信息。
2. 实验原理图像的配准过程主要可以分为三个过程:控制点对选取(自动或手动)、坐标映射函数拟合、映射后像素重采样。
1) 控制点对选取对于图像匹配过程,首先要通过控制点对建立两幅图像间的坐标联系。
控制点的选取有可分为自动和手动两种方式。
对于自动选取,可以采用SIFT 等算法实现;对于手动选取,需要实验人员通过目测观察的方法找到不同时相的遥感图像中的相同目标,这些控制点可以是建筑物的顶点、道路等的交叉点等或其他较容易分辨的位置。
选出控制点后将这些点的坐标信息记录下来,值得注意的是所选控制点的数量、分布情况以及精度会直接影响配准结果的精度和质量。
2) 图像几何校正图像的配准实质上就是通过图像的几何校正,将产生几何失真的图像转换为标准的数字图像。
采用的方法就是通过一定的映射函数将原图像的像素坐标转换为标准图像中的坐标(,)u f x y = (,)v g x y =其中(,)x y 表示原图像中的像素坐标值,(,)u v 表示参考图像中的像素坐标值。
映射函数的选择可以有多种形式,一般较为简单常用的是多项式函数,以二次多项式函数为例,映射函数的具体形式为2201234522012345u a a x a y a xy a x a y v b b x b y b xy b x b y⎧=+++++⎨=+++++⎩ 其中,05,,a a ,05,,b b 分别表示二次多项式横纵坐标映射函数中对应项的系数,通过选定控制点,可以将这些系数项求解出来。
遥感图像配准实验报告
用SPOT校正TM数据,附操作过程截图和校正后TM影像图片
[体会及建议]
通过本次试验熟悉在ENVI中对影像进行地理校正,添加地理坐标,以及如何使用ENVI进行影像到影像的配准和影像到地图的校正。在实验过程中移动光标,查看坐标值,要小心谨慎注意地图坐标和经纬度之间的关系。以免出现错误。
(2)通过计算机操作与地理知识的结合增强对地理学科的兴趣,为以后继续从事相关工作奠定基础。
(3)树立地理学思想,理解并掌握地理学科的学习、实践的方法。
二、实验内容
遥感图像的几何校正,IHS融合方法。
三、实验准备
(1)IHS融合: IHS融合法是比较常用的一种融合方法。其基本原理是首先将空间分辨率
较低的三个多光谱影像变换到IHS彩色空间,得到明度(I),色别(H)和饱和度(S)三个分量;然后将高空间分辨率影像进行对比度拉伸,达到与I分量具有相同的均值和方差;再将处理后的高空间分辨率影像替换I分量,作IHS逆变换后就得到融合后的影像。
篇三:遥感实验报告
实验报告(实验一)
[实验名称]ENVI窗口的基本作
[实验目的与内容]
实验目的
熟悉ENVI软件的窗口操作方法,掌握影像信息、像元信息浏览方法,影像上距离和面积量算方法。实验内容
1、熟悉遥感图像处理软件ENVI的窗口基本操作。2、查看影像信息和像元信息。3、距离测量与面积测量。
[实验数据处理及成果]
遥感图像配准实验报告
篇一:遥感图像处理实验报告
《遥感数字图像处理》
实习报告
学院:环境与资源学院
班级:地理1002
学号:周颖智
姓名:20101171
西南科技大学环境与资源学院遥感实习…………………......2
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Harbin Institute of Technology多时相遥感图像配准实验报告课程名称:院系:姓名:学号:授课教师:哈尔滨工业大学1.实验目的(1)了解图像配准原理、导致几何失真的原因及矫正方法(2)掌握两幅图像配准的基本方法(3)学会评价配准结果2.实验原理图像配准就是将不同时间、不同传感器或不同条件下(天候、照度、摄像位置和角度等)获取的两幅或多幅图像进行匹配、叠加的过程。
图像配准的基本过程是寻找把待配准图像中的点映射到参考图像中对应点的最佳变换,从而去除待配准图像和参考图像之间在几何上的不一致,如平移、旋转和形变,最终使得同一目标在不同的图像上具有相同的坐标位置。
图像配准中的主要问题就是确定这种映射关系,一般来讲我们将需要进行变换的图像成为输入图像或待配准图像,将用于矫正输入输入图像的图像成为参考图像。
图像配准的基本步骤包括:(1)特征提取:在进行图像配准之前根据实际需要选择图像中待匹配特征。
(2)特征匹配:在确定了来自不同图像的特征集后,建立特征的对应关系。
对应关系建立可以通过使用各种特征描述、相似性测量以及空间关联的方法实现。
(3)变换模型估计:通过估计或者最优搜索等方法得到映射函数的类型和参数,以便能够对齐待配准图像和基准图像。
(4)图像重采样和变换:依靠映射函数对输入图像进行图像变换,使用适当的插值算法计算出非整数点坐标的图像值。
常用的重采样方法包括:(1)最近邻重采样法:简单地选择其中心距图像上的点最近的实际像素,然后将这个像素变换到相应的显示网格上。
这种技术适用于新图像用于分类的情况,原因是该图像是由原始像素的亮度构成的,只是按照正确的几何关系将像素进行重新排列。
(2)双线性插值法:对于图像中与给定的显示网格位置对应点的周边四个像素使用三次线性插值。
(3)三次卷积插值法:利用周边16个像素,在图像中一点四周各取4个像素,利用三次多项式对这些像素确定的四条线对进行拟合以形成4个插值点,然后利用第5个三次多项式对这四个插值点进行拟合,最终合成在显示网格对应位置的亮度值。
利用抽样定理以及由一个离散样本集构建连续函数的方法,可以推导出用于插值的多项式的实用形式。
3.实验步骤(1)实验图像为:参考图像待配准图像(2)选取控制点,一共手动选取了20个控制点对:(3) 双线性映射模型为:12345678x c v c w c vw c y c v c w c vw c =+++=+++利用最小二乘法计算模型参数得:123456780.9995,0.0034,0.0000,58.90260.0008,0.9982,0.0000,53.5062c c c c c c c c ==-==-=-===2阶多项式映射模型为:2212345622789101112x c v c w c vw c v c w c y c v c w c vw c v c w c =+++++=+++++利用最小二乘法计算模型参数得:1234567891011120.9950,0.0093, 1.6155,7.4176, 1.36025,57.96760.0045, 1.0062, 1.98196,8.98226, 1.77005,52.3716c c c e c e c e c c c c e c e c e c ==-=-=-=-=-===-=--=--=(4) 获得配准结果:双线性映射模型:配准后图像参考图像二阶多项式映射模型:配准后图像参考图像4. 实验结果与分析选取10对同名点进行定量分析:双线性映射模型: x 方向标准差 y 方向标准差 综合标准差 0.60200.14000.6180二阶多项式映射模型:x方向标准差y方向标准差综合标准差0.6270 0.3352 0.7110由分析结果可以看出两种模型的处理效果并无明显区别,但在一些边缘部位如图中黄色方框所示,二阶多项式映射模型先比喻会产生一些杂散点。
从计算得的标准差来看,双线性模型优于二阶多项式模型,这是因为本次实验中两幅图片的差异主要由于几何平移与旋转造成,不存在扭曲等变化,使用双线性模型更合适,可以保证全局达到最优,而二阶多项式模型只能保证局部参考点最优。
5.实验程序clear all;close all;image1=imread('E:\遥感导论\实验一\subcut1.tif'); %参考图像image2=imread('E:\遥感导论\实验一\subcut2.tif'); %输入图像load('controlpoints.mat')load('testpoints.mat')%双线性模型n=size(fixedPoints_control,1);emin=1;sume=0;RMS=0;jianyan_point=[];jbase_point=[];C1=[];C2=[];for i=1:njianyan_point=fixedPoints_control(i,:);fixedPoints_control(i,:)=[];jbase_point=movingPoints_control(i,:);movingPoints_control(i,:)=[];d=ones(n-1,4);d(:,1)=fixedPoints_control(:,1);d(:,2)=fixedPoints_control(:,2);d(:,3)=fixedPoints_control(:,1).*fixedPoints_control(:,2);X=movingPoints_control(:,1);Y=movingPoints_control(:,2);C1(:,i)=(inv(d'*d))*d'*X;C2(:,i)=(inv(d'*d))*d'*Y;I=[jianyan_point(1,1),jianyan_point(1,2),jianyan_point(1,1)*jian yan_point(1,2),1];X_r=C1(:,i)'*I';Y_r=C2(:,i)'*I';e(i)=(jbase_point(1,1)-X_r)^2+(jbase_point(1,2)-Y_r)^2;if e(i)<eminC1_best=C1(:,i);C2_best=C2(:,i);emin=e(i);endif i>1;fixedPoints_control=[fixedPoints_control(1:i-1,:);jianyan_point;f ixedPoints_control(i:n-1,:)];movingPoints_control=[movingPoints_control(1:i-1,:);jbase_poi nt;movingPoints_control(i:n-1,:)];elsefixedPoints_control=[jianyan_point;fixedPoints_control(i:n-1,:)];movingPoints_control=[jbase_point;movingPoints_control(i:n-1, :)];endsume=sume+e(i); endRMS=sqrt(sume/n)eminC1_bestC2_bestimage1_1=image1(:,:,1);image2_1=image2(:,:,1);image3=zeros(512,512);for i0=1:512;for j0=1:512;I=[i0,j0,i0*j0,1];i=round(C1_best'*I');j=round(C2_best'*I');if (i<=0||j<=0||i>512||j>512)image3(j0,i0)=image1_1(j0,i0);elseimage3(j0,i0)=image2_1(j,i);endendendfigure(1)imshow(image3,[])title('配准后图像')figure(2)imshow(image1(:,:,1),[])title('参考图像')figure(3)imshow(image2_1,[])title('待配准图像')ex=[];ey=[];sumx=0;sumy=0;sum=0;for i=1:10;S=[fixedPoints_test(i,1),fixedPoints_test(i,2),fixedPoints_test(i,1 )*fixedPoints_test(i,2),1];M(i)=C1_best'*S';N(i)=C2_best'*S';ex(i)=movingPoints_test(i,1)-M(i);ey(i)=movingPoints_test(i,2)-N(i);sumx=sumx+ex(i)^2;sumy=sumy+ey(i)^2;sum=sum+ex(i)^2+ey(i)^2;endmsex=sqrt(sumx/10)msey=sqrt(sumy/10)mse=sqrt(sum/10)clear all;close all;image1=imread('E:\遥感导论\实验一\subcut1.tif'); %参考图像image2=imread('E:\遥感导论\实验一\subcut2.tif'); %输入图像% figure,imshow(image1,[])% title('参考图像'),axis on% figure,imshow(image2,[])% title('待配准图像'),axis oncpselect(image2,image1)load('controlpoints.mat') load('testpoints.mat')%二阶多项式模型n=size(fixedPoints_control,1); emin=1;sume=0;RMS=0;jianyan_point=[];jbase_point=[];C1=[];C2=[];for i=1:njianyan_point=fixedPoints_control(i,:);fixedPoints_control(i,:)=[];jbase_point=movingPoints_control(i,:);movingPoints_control(i,:)=[];d=ones(n-1,6);d(:,1)=fixedPoints_control(:,1);d(:,2)=fixedPoints_control(:,2);d(:,3)=fixedPoints_control(:,1).*fixedPoints_control(:,2);d(:,4)=fixedPoints_control(:,1).*fixedPoints_control(:,1);d(:,5)=fixedPoints_control(:,2).*fixedPoints_control(:,2);X=movingPoints_control(:,1);Y=movingPoints_control(:,2);C1(:,i)=(inv(d'*d))*d'*X;C2(:,i)=(inv(d'*d))*d'*Y;I=[jianyan_point(1,1),jianyan_point(1,2),jianyan_point(1,1)*jian yan_point(1,2),jianyan_point(1,1)*jianyan_point(1,1),...jianyan_point(1,2)*jianyan_point(1,2),1];X_r=C1(:,i)'*I';Y_r=C2(:,i)'*I';e(i)=(jbase_point(1,1)-X_r)^2+(jbase_point(1,2)-Y_r)^2;if e(i)<eminC1_best=C1(:,i);C2_best=C2(:,i);emin=e(i);endif i>1;fixedPoints_control=[fixedPoints_control(1:i-1,:);jianyan_point;f ixedPoints_control(i:n-1,:)];movingPoints_control=[movingPoints_control(1:i-1,:);jbase_poi nt;movingPoints_control(i:n-1,:)];elsefixedPoints_control=[jianyan_point;fixedPoints_control(i:n-1,:)];movingPoints_control=[jbase_point;movingPoints_control(i:n-1, :)];endsume=sume+e(i);end%RMS=sqrt(sume/n)eminC1_bestC2_bestimage3=zeros(512,512);for i0=1:512;for j0=1:512;I=[i0,j0,i0*j0,i0*i0,j0*j0,1];i=round(C1_best'*I');j=round(C2_best'*I');if (i<=0||j<=0||i>512||j>512)image3(j0,i0)=0;elseimage3(j0,i0)=image2(j,i);endendendfigure(1)imshow(image3,[])title('配准后图像')figure(2)imshow(image1,[])title('参考图像')figure(3)imshow(image2,[])title('待配准图像')ex=[];ey=[];sumx=0;sumy=0;sum=0;for i=1:10;S=[fixedPoints_test(i,1),fixedPoints_test(i,2),fixedPoints_test(i,1 )*fixedPoints_test(i,2),fixedPoints_test(i,1)*fixedPoints_test(i,1), ...fixedPoints_test(i,2)*fixedPoints_test(i,2),1];M(i)=C1_best'*S';N(i)=C2_best'*S';ex(i)=movingPoints_test(i,1)-M(i);ey(i)=movingPoints_test(i,2)-N(i);sumx=sumx+ex(i)^2;sumy=sumy+ey(i)^2;sum=sum+ex(i)^2+ey(i)^2;endmsex=sqrt(sumx/10)msey=sqrt(sumy/10)mse=sqrt(sum/10)。