高通过性与平稳性月球车移动系统设计
基于自主行为控制的月球车运动规划的开题报告

基于自主行为控制的月球车运动规划的开题报告一、研究背景随着探索宇宙的深入,月球探测日益成为一项重要的领域。
在进行月球探测时,运动规划是其中的一个重要环节。
月球车作为月球探测的主要工具之一,需要高效而准确的运动规划,来通过复杂的月球地貌,获取丰富有用的数据信息。
目前,国内外对于月球车运动规划的研究存在很多,而这些研究主要基于三大方向:传感器数据分析、最优化算法和机器学习。
但是以上研究所涉及的实验环境大多是静态环境下制定的路线,而在实际的月球探测中,由于月球表面环境复杂,车辆需要能够根据所掌握的情况自主决策。
因此,基于自主行为控制的月球车运动规划成为了研究关注的焦点。
该研究旨在通过探索机器智能技术,实现月球车的自主控制,为月球探测提供更高效、更准确的运动规划服务。
二、研究目标和内容本研究将基于自主行为控制,开发一种适合月球车的运动规划策略,此策略将可以使月球车在不同的月球地貌环境中,根据所掌握的情况自主控制运动,防止月球车出现碰撞、卡顿等现象,提高月球车的稳定性和可靠性。
本研究的内容主要包括以下几点:1. 月球地貌环境建模:首先,需要将月球表面地貌进行建模,以获取更真实、可靠的环境数据,并将其转化为数字化地图数据。
2. 自主决策算法设计:将经典的自主决策算法,如强化学习、遗传算法等等,进行改进,使其适用于月球车的自主控制,以实现月球车在不同地貌环境下复杂动态场景中的自主决策。
3. 运动规划策略实现:在月球车通过自主决策算法之后,需要针对特定地貌环境,实现相应的运动规划策略,为月球车提供准确、高效的运动控制指令。
4. 仿真实验与验证:构建开放式月球车行动控制仿真实验平台,通过充分验证各项算法的可行性、可靠性,来检验月球车运动规划策略的有效性与优越性。
三、研究意义与创新本研究的意义主要体现在以下几个方面:1. 丰富月球车运动规划研究的方法:本研究提出的基于自主行为控制原理的月球车运动规划方法,是一种全新的、基于智能技术的优化算法。
“月轮号”设计说明书
图3
差速机构
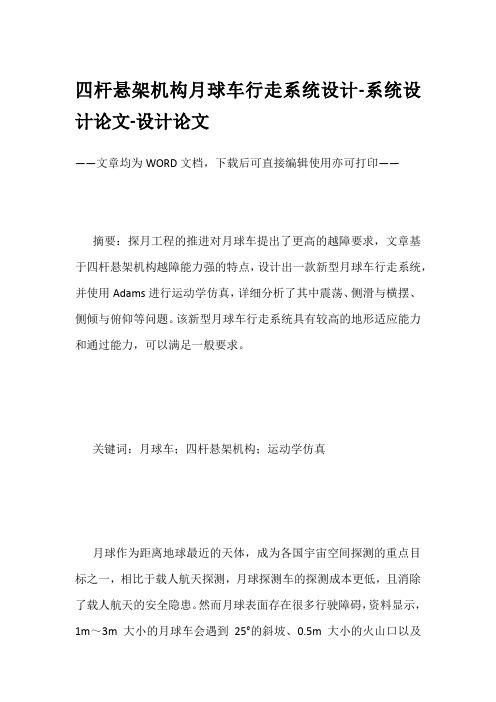
3.3 车轮
图 4 车轮
为提高车体的机动性,增强月球车的转弯能力,采用半球形车轮。月球车四个车轮均有 独立转向机构,可实现原地 360° 灵活转弯。月壤比较松软,所以当轮子行走时会因为下陷 而与月面成面接触,从而减小接触压强。 轮子上安装有独立转向机构, 其原理图如下所示关节处的电机可以驱动车轮前进, 曲柄 处的电机可以使车轮转向而不与其他运动发生干涉, 即相对独立转动, 四个车轮的独立转向 可以增加移动系统的机动灵活性。
I
2011 年全国大学生机械产品数字化设计大赛“月轮号”月球车
摘要:月球具有可供人类开发和利用的各种独特资源,其特有的矿产和能源,是对地球资
源的重要补充和储备,将对人类社会的可持续发展产生深远影响。2004 年,我国正式开展 月球探测工程,并命名为“嫦娥工程” 。 2007 年,我国第一颗月球探测卫星“嫦娥一号” 顺利升空,进行了为期一年的月球探测任务,预计到 2020 年我国将走完 “绕,落,回”三 步, 完成对月壤特性、 地月空间环境等的探测。 月球表面的地质构造极其稳定, 地震很微小, 其表面遍布撞击坑,月球高地,月海,风化层,体貌特征复杂。月球具有高真空、低重力、 无偶极磁场,温度差极大的特殊环境,而且月球表面直接遭受太阳风,太阳宇宙射线和银河 宇宙射线的照射及各种流星体的撞击。 这种特殊的空间环境要求机器人系统能够在预先未知 或非结构化的环境中执行变化的任务,月球车的移动系统无疑是星球探测的核心技术之一。 机器人的移动平台应具备良好的几何通过性、越障性、抗倾覆性、行驶平顺性、牵引控制特 性和能耗特性。
2.2 车体 车体主要由车身,差速机构组成。 2.2.1 车身
2
2011 年全国大学生机械产品数字化设计大赛“月轮号”月球车 a. 材料的选择 车体材料选择铝合金, 在低温条件下能保持较好的强度和塑性, 具有很好的抗腐蚀性和 导热性。在低温和真空条件下吸收气体较好,能强化。 b.结构设计及加工分析 首先,车体底部应该有一定的凹起,一方面这样能够保证通过角,另一方面可以还能够 一定程度的避免地面的磨损与撞伤,而且还美化了车体的外观;其次为了减小电机的负荷, 车体重量应该尽量小,月球车车体承受作用力较小,本设计把车体板设计成空心壳板,主要 物理参数如下表所示(与实心板比较) (注:左侧为空心板数据) 。从以下数据可以看出,重 量约是实心的三分之一,进行应力分析,固定一个表面在相对面上施加2MPa力,部分结果 如下:可知安全系数满足使用要求,空心时最大变形位移为 0.006mm,实心时是0.0003mm, 虽然增量较大,但是位移量很小,肯定能满足要求。
月球车设计报告

四、月球车仿真运动分析 .......................................... 17
4.1 模拟路况的建立 ....................................................................................................... 17
(10) 进行动力学仿真,获取各电机转矩的变化规律; (11) 将月球车行走系统仿真运动过程生成视频文件; (12) 整理设计资料,编写设计报告。
1.2 提交要求
(1) 纸质文档——①设计报告 1 份(A4 纸打印,装订成册);② 装配图纸 1
5 / 25
设计原理与方法 2—月球车行走系统设计与分析
3.3.1 月球车驱动电机选择 ..................................................................................... 9 3.3.2 月球车前进轮设计 .......................................................................................... 9 3.4 月球车差速器设计 ................................................................................................... 12 3.4.1 差速器的悬挂系统 ........................................................................................ 12 3.4.2 差速器的自由度 ............................................................................................ 12 3.4.3 差速器的运动分析 ........................................................................................ 13 3.4.4 差速器输入轴的设计 ................................................................................... 13 3.5 月球车总体设计 ...................................................................................................... 14 3.5.1 月球车三维模型图:....................................................................................... 15
工程月球车的设计方案

工程月球车的设计方案摘要随着人类对外太空的探索不断深入,工程月球车的设计与制造已成为一个迫切的需求。
本文将介绍一款用于月球探测与科学研究的工程月球车的设计方案。
该月球车将具备行驶、操控、采集样本、传感器监测等多项功能,以满足人类对月球环境的探索需求。
1. 引言自20世纪之初,人类就对月球进行了广泛的科学研究,特别是在上世纪60年代末,美国和苏联分别成功地进行了载人登月任务。
自此之后,对月球的研究更是广泛展开。
为了更深入地了解月球表面的地质构造、地质活动以及与地球的相似性,月球探测车(月球车)的设计与制造变得极为重要。
2. 设计目标本设计方案将针对工程月球车的主要设计目标进行分析。
月球车需要满足以下基本目标:1)能够在月球表面行驶并且能够适应不同的地形环境;2)携带各种科学研究设备,如激光测距仪、地质钻探设备等;3)具备远程操控和自主导航能力;4)能够在极端环境下工作,如低温、真空等;5)具备样本采集和分析功能;3. 结构设计工程月球车整体结构设计分为底盘、动力系统、悬挂系统、传动系统等几大部分。
底盘设计:底盘设计应具有足够的强度和刚度,以支撑月球车整机。
采用轻质合金材料作为底盘材料,并且加强关键连接处的焊接连接,以保证整机的稳固性和耐用性。
动力系统:考虑到月球表面的复杂地形,月球车的动力系统应该具备较强的通过性和悬挂适应性。
采用四轮驱动,同时结合电动发动机和太阳能电池板作为能源,并配置强有力的悬挂系统,以增加车辆的通过性和操控性。
传动系统:传动系统负责将动力从电动发动机传输到车轮,需要具备较高的效率和可靠性。
采用先进的齿轮传动设计,以保证传动效率和传动寿命。
4. 功能设计月球车需要具备丰富的功能以满足科学研究的需求,包括采样、分析、传感器监测等。
采样系统:月球车需要能够在月球表面采集地质样本并进行分析。
通过装备高精度激光测距仪,携带地质钻探设备等,以实现对地质样本的采集和分析。
传感器监测:月球车需要装备多种传感器,如温度传感器、湿度传感器、气压传感器等,以对月球表面的环境参数进行监测。
月球车行走系统设计

月球车行走系统设计02011509——姜晓文方案总体设计◆1、车轮设计——普通车轮◆2、悬架设计——双曲柄滑块联动悬架◆3、车体设计——差速轮系◆4、驱动电机和减速器——直流电机和行星齿轮减速器车轮设计普通车轮:普通轮系通常采用包容结构, 对直线牵引、转向驱动、检测等功能模块进行一体化设计与制造, 减少质量和增强可靠性。
行星车轮:越障能力强, 且有一定的地面自适应能力,但转向只能通过差速实现, 不如普通轮系灵活。
选择采用普通车轮,保证转向的灵活。
双曲柄滑块联动:相比于摇臂式的悬架,获得较好的越障能力和行走的平顺性。
选择采用双曲柄滑块联动悬架,保证一定的越障能力。
车体设计差速轮系:车体采用差速轮系与左右车体固联,均化车体的俯仰角。
采用差速轮系,保证车体行驶的平稳性。
驱动电机和减速器设计牵引电机和转向电机分别实现行走和转向。
牵引电机:采用直流电机和行星齿轮减速器转向电机:采用直流电机和行星齿轮减速器和蜗轮蜗杆◆车轮尺寸◆悬架结构尺寸◆电机的选择和行星齿轮减速器的传动比——设计要求◆最大外形尺寸:900mm(长)×600mm(宽)×450mm(高);◆总质量不超过50kg◆移动速度不小于0.1m/s——月球地面情况的参考信息◆1~3米的月球车大概会遇到25°斜坡,15~20cm高的障碍。
(可以一这个数据建立月球表面的模型和为满足一定的越障能力确定悬架的尺寸)◆月球表面的滚动阻力系数0.35左右。
(结合月球表面的路面情况(干沙和坑洼)估计,还未在文献中找到可以参考的数值)◆参考车轮的大小直径220mm 宽度100mm。
(车轮的直径大小会影响车轮转速和所需要的扭矩)——悬架尺寸的设计要满足前后轮的20cm的越障高度。
主摇臂:235mm连杆1:234mm连杆2:234mm曲柄1:158mm曲柄2:158mm——电机和减速器的传动比的设计驱动力的计算:车的行驶阻力=滚阻+坡阻F=F f+F i=Gφ=G(i+f)=mg(i+f)/2;月球上重力加速度g=1.63m/s^2坡度i=tanð;倾斜角ð;滚阻f;驱动力=行驶阻力F t=F;空载质量50kg预计月球车的最大载荷为100kg F=100X1.63X(0.35+0.46)/2=66.015N驱动力F t=66.015N——电机和减速器的传动比的设计电机的选择计算:工作功率P t=F t v (w);电机的功率P=P t/η;η传递效率;根据P值选择电机工作功率:P t=F t v =6.6015.X0.1=6.602(w) MAXON行星齿轮减速器的传递效率η1=0.65联轴器的传递效率η2=0.98η=η1Xη2Xη2=0.62426P=6.602/0.637=10.58w选取额定功率为15w的Maxon伺服电机型号为:267121额定电压:24v额定转速:2800r/min方案的具体设计——电机和减速器的传动比的设计行星齿轮减速器选择:车轮半径R车轮转速n=60v/(2piR)传动比i=额定转速/车轮转速根据传动比选择减速器车轮半径:110mm车轮转速n=60X0.1/(2piX0.11)=8.68r/ min传动比i=1210/8.68=244选择Maxon行星齿轮减速器型号:218418减速比为256:1能够承受的最大扭矩为:0.15Nm◆悬架的设计基本完成◆牵引电机和行星齿轮减速器的计算已经完成◆接下来的进度:◆悬架的进一步计算(根据悬架的受力来确定悬架的截面宽度)◆转向的设计◆构建三维模型。
八轮星球探测车移动系统的设计与分析

[4]邓宗全,胡 明,高海波,等. 月球探测车关键技术及其原理样机的研制.2002年深空探测技术与应用科学国际研讨会. 青岛,2002:29-35
计划进度:
起止时间
内容
2012.11.15~2012.12.10
调研、信息汇总,文献查阅分析
[10]付宜利,徐贺,王树国等. 沙地环境移动机器人驱动轮的发展概况综述.机器人技术与应用. 2004,4: 22-29
[11]刘明治,高桂芳.空间可展开天线结构研究进展. 宇航学报. 2003, 24(1):82-87
[12]岳建如.研究空间可动结构设计与控制分析.浙江大学博士学位论文.2002:2-6
[2]CHEN Baichao, WANG Rongben, YANG Lu, JIN Li-sheng, GUO Lie.Design and Simulation Research on a New Type of Suspension forLunar Rover.Proceedings of the 2007 IEEE International Symposium onComputational Intelligence in Robotics and Automation.2007:1-5
目标:
提出的设计方案可行,结构设计合理,完成的三维、二维图纸设计,并完
成八轮星球探测车运动学分析与仿真验证。
任务:
1.八轮星球探测车可展开移动系统方案结构设计
四杆悬架机构月球车行走系统设计-系统设计论文-设计论文
四杆悬架机构月球车行走系统设计-系统设计论文-设计论文——文章均为WORD文档,下载后可直接编辑使用亦可打印——摘要:探月工程的推进对月球车提出了更高的越障要求,文章基于四杆悬架机构越障能力强的特点,设计出一款新型月球车行走系统,并使用Adams进行运动学仿真,详细分析了其中震荡、侧滑与横摆、侧倾与俯仰等问题。
该新型月球车行走系统具有较高的地形适应能力和通过能力,可以满足一般要求。
关键词:月球车;四杆悬架机构;运动学仿真月球作为距离地球最近的天体,成为各国宇宙空间探测的重点目标之一,相比于载人航天探测,月球探测车的探测成本更低,且消除了载人航天的安全隐患。
然而月球表面存在很多行驶障碍,资料显示,1m~3m大小的月球车会遇到25°的斜坡、0.5m大小的火山口以及15cm~20c高的障碍体,因此对于月球车的越障能力提出了很高的要求[1]。
本文自拟参数,提出了一种新型基于四杆悬架机构的月球车行走系统,进行了总体设计以及运动学仿真,确定了电机和减速器的选择,对实物的制造起到了指导作用。
1总体设计本文所设计的月球车参数如下:最大外形尺寸为900mm(长)×600mm(宽)×450mm(高),总质量不超过50kg,移动速度不小于0.1m/s。
1.1驱动设计月球上地貌复杂,需要月球车有较高的灵活度,为了满足这一要求,本文所设计的月球车采用六轮驱动,前后轮设计牵引电机和转向电机实现驱动和转向,中间轮仅设计牵引电机实现驱动。
1.2悬架设计本文所选取四杆悬架系统的越障原理如图1所示。
该系统在接触到障碍物时,利用障碍物产生向后的推力驱动平面四杆机构运动,使相应的车轮抬起或落下,达到越过障碍物的目的,由于越障时主摇臂和副摇臂的瞬时转动中心下移至地面以下,因此具有比其他机构更强的越障能力。
预计月球车需越过最大尺寸为15cm左右高度的障碍物,以此为根据进行多次试算,最终设计尺寸如图2所示。
利用SolidWorks 的推断约束,计算出前中后轮的极限越障尺寸分别为前轮200.23mm、中间轮216.40mm以及后轮176.17mm,如图3所示。
月球车设计PPT课件

Rocky7
Rocky系列探测车是JPL 开发的地面样机,其中 以Rocky 7最为成熟,它 在Sojourner的基础上作 了一些改进,Rocky7大 小为68x48x32cm,轮 径13cm。增加了一对安 装在桅杆上的导航相机 。主要用来验证为了在 火星表面行走更长距离 (50km)所需的新技术 应用情况。
自主学习能力是个人成功的关键
人的知识与能力就像一盘围棋
自主学习能力是个人成功的关键!
知识能力体系的几个层面: 一、工具层(常识层):数学、英语、计算机应
用、哲学… 二、专业层(基础层):专业体系、专业基础科
学、专业应用 三、能力层(综合层):观摩性实践(社会实践
)、复现性实践(综合实验课)、执行性实践 (毕业设计)、尝试性实践(比赛、毕设)、 创新性实践(自主选题实践)
范例:一种潜航器
本科4年级学生作品
建模软件 动画及特效软件 流体仿真软件 后期合成软件 总结:一个好的概念设计就像一部好的电影,
有好的创意、好的脚本和精彩的视觉效果, 才能打动观众和投资人。30秒的动画能决定 成败!
二、月球车的功能和工作过程
月球车是一种在月面移动工作,执行科考探 测任务的半自主移动平台,是一种特殊的航 天器。
通过多种减速方式共同作用进行减速,达到软着陆的目
的。
相对于软着陆,物理上的硬着陆一般是指航天器未
减速(或未减速到人员或设备允许值),而以较大速度
直接返回地球或击中行星和月球,这是毁坏性的着陆。
前苏联月球2、5、7、8号探测器,金星3号探测器均
是硬着陆,其探测数据在着陆前已送回地球接收站。
月球车、火星车的几大功能
Roverifier算法试验平台
控制软件
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Abstract:The terrain and soil environment of moon slIrface are hard for vehicle to move.SO the highel"capabilities are required for
万方数据
机械工程学报
第44卷第12期
后不得不由宇航员帮助移动。Lunokhod II也曾经在 环形坑斜坡上出现打滑下陷【2l,最后不得不放弃原 定的行驶路线。因此,传统的悬架和车轮可能不能 够很好的满足月球车完成月表巡视探测对其移动系 统的要求。
月球车的越障能力和保持载荷平台平稳能力 主要取决于悬架机构。月球车的附着牵引能力、行 驶平顺性和能量消耗主要是由车轮决定的。为了提 高月球车悬架的性能,国外已经研制了多种类型的 悬架机构。例如,NASA将摇臂式悬架13】应用于 sojoumer、MER、FIDO和SRR等行星/试验样车上, ESA和俄罗斯Rover科技有限公司联合研制出RCL Concept系列样车悬架,ASL研制出了CRAB、 DoubleSpfing系列样车悬架【4】,瑞士联邦技术学院 研制了Shrimp样机悬架[5】,日本宇航中心、梅基大 学、绰大学联合研制的PEGASUS悬架等【6J。这些 悬架机构在一定程度上提高了月球车移动系统的能 力,但每种机构都存在其不足和缺点,对提高悬架 性能的设汁还存在一定空间。国外对行星探测车车 轮的设计也是多种多样的,如前苏联为Lunokhod 设计的弹性筛网轮,NASA为LRV设计的弹性胎 轮,为火星车设计的刚性槽状和针状履刺轮,以及 瑞士、德国等开发的柔性车轮等[71。由于月表土壤 的多样性,不同特性的土壤对车轮的要求也不同, 因此,传统车轮往往存在通过性、平顺性、能耗之 间的矛盾。为了权衡矛盾,在设计车轮时,不得不 降低其单项性能。
图4主摇臂和反四边形机构尺寸及受力参数图
设定两机构相关部位尺寸相同,外界对两机构 的作用相同。图4中G为载荷平台重力,R,% 分别为遇障时作用在两机构末端外力、外力矩。上3, 厶、厶、凰、岛、巧和珂分别为长度和角度。设置 瓦l,瓦2分别为作用在两机构末端的平衡反力矩。 该力矩为零时,表示杆件进入逆时针旋转的临界状 态,也就是车轮3越障抬起的临界状态。该力矩越
~
(1.吉林大学交通学院长春130025; 2.中国空间技术研究院北京 100094)
摘要:月表行驶环境恶劣,这对月球车移动系统提出了更高的要求。为提高月球车的移动能力,提出一种具有高通过性和载 荷平台平稳性的新型月球车移动系统。该移动系统由正反四边形机构悬架和伸缩叶片复式步行轮组成。正反四边形悬架是一 种适用于六轮月球车的非独立悬架,通过与摇臂式悬架进行受力和姿态运动的对比分析和仿真对比分析可知,它可以使月球 车具有较高的越障性能并在越障过程中保证载荷平台的相对平稳。同时,针对不同松散程度的月壤,根据车轮一土壤力学原 理,设计出伸缩叶片复式步行轮。该种车轮最突出的特点是能够根据车轮与土壤间的相互作用关系,自适应调节叶片入土深 度,从而改变车轮的牵引能力、平顺性和能耗。对该种移动系统进行多项移动性能试验。结果表明,该种新型移动系统具有 较高的越障能力和保持载荷平台平稳能力,能够在恶劣路况下最大限度的发挥车轮的牵引能力,而且在路面通过性良好时尽 可能的节约能耗,增加车轮滚动的平顺性。 关键词:新型移动系统悬架车轮月球车 中图分类号:TP302
连杆l、连杆2、连杆3和连杆4相互铰接围成 四边形机构,连杆2、连杆4、连杆5和连杆6相互
图5正反四边形悬架模型
2悬架性能仿真分析
2.1仿真模型 为了检验正反四边形悬架的性能,将其与美国
图1 Rocky7及其悬架示意图
图2副摇臂尺寸及越障受力参数图
当车轮1遇障时,通常0邻1<900,0<f12<900。 从图2中可以看出,),l越小厶l越大,从而孔越大。 因为口l+Pl+71--900,所以当五最大时(n--o),反l的 值在0"900之间,即副摇臂顺时针倾斜一定角度 后,车轮1的越障主动力矩最大。副摇臂从水平位 置顺时针旋转一定角度后,啦增加,由于 T2=F2Lb2≈犯2sin(f12一眈),所以死减小,即车轮l 的越障阻力矩减小。综上,当副摇臂顺时针倾斜一 定角度后,车轮1的越障能力增加。
Rocky7是火星车sojourner的改进型,其摇臂 式悬架的副摇臂如图l所示。
为了提高副摇臂的越障性能,将副摇臂顺时针 倾斜一定角度进行越障性能分析,如图2所示。
定义Fl、珀、R和%分别为车轮l与副摇臂 连接点副摇臂所受到的外力、外力矩、车轮2与副 摇臂连接点副摇臂所受到的外力、外力矩。上l、三2
同理证明,当副摇臂顺时针倾斜一定角度后, 车轮2的越障能力也增加。
根据机构学理论,如图3所示的正四边形机构, 为倾斜副摇臂的等效机构,其末端点的运动和受力 相等。由以上分析可知,正四边形机构的越障能力 高于摇臂悬架的副摇臂机构。
图3倾斜的副摇臂及正四边形机构示意图
万方数据
2008年12月
陈百超等:高通过性与平稳性月球车移动系统设计
第44卷第12期 2008年12月
机械工程学报
CHINESE JOURNAL OF MECHANICAL ENGINEERING
v01.44 No.12
Dec.
20 08
DoI:lO.3901/JME.2008.12.143
同Cj ..__JL__。 通过性与平稳性月球车移动系统设计木
陈百超1王荣本1 贾 阳2金立生1 郭 烈1
为铰接点与车轮l、2中心点的距离,霸、乃为副摇 臂所受的越障主动力矩(Jwl页时针力矩)、越障阻力矩 (逆时针力矩),厶l、三b2为乃、疋的力臂,仅l、a2、 声I、尾分别为副摇臂、风、局与水平面的夹角,yl、 仡为副摇臂与越障主动力矩力臂、越障阻力矩力臂 夹角。当外界环境已知,,l、,2、∥l、仍、%、%、 厶和如已知。
locomotion system of lunar rover.An innovative locomotion system with high trafficability and cab smoothness is proposed to meet the requirements ofhard environment.It is composed ofthe obverse-reverse four-linkage suspension and the vane—telescopic walking wheel.The obverse-reverse four-linkage suspension is a dependent suspension for six—wheel vehicle.It Call make the vehicle have strong climbing capability and keep cab relatively smooth during climbing through the comparison with rocky—bogie suspension based on dynamics,kinematics and simulation.Aiming at enhancing performance in sandy soil of multi—incompaet degree,the vane—telescopic walking wheel is proposed.Based on the interaction between wheel and soil,the wheel can automatically adjust the depth of vane into soil SO as to change the tractive capability,ride comfort and energy consumption.Some tests are also done to
大,说明车轮3越障能力越强。瓦l、%可通过式(1)、
(2)表示
瓦l=[sin屈×(岛+厶+ctan6×H1)+
COS屈xHl]XF3一耳3一G×/.3
(1)
e‘,::2l刍I—堕面!鱼历±五盟兰忑尘矿堑××ssnin聊材++
]
岛xsin屈l×(厶+厶)一G×厶
(2)
j
为了分析方便,不妨取J=g=450,代入式(1)、 (2),两式之差可表示
145
1.2反四边形机构设计 为提高主摇臂的越障性能,提出了一种反四边
形机构,如图4所示,并将其与摇臂悬架的主摇臂 进行越障性能对比。
G
G
铰接围成反四边形机构。连杆1、连杆3和连杆6 的末端连接前轮、中轮和后轮。左右两侧的连杆4 与两半轴固接,两半轴的另一端与差速机构连接, 差速机构固定在载荷平台上。
Innovative Locomotion System with High Trafficability and Cab Smoothness for Lunar Rover
CHEN Baicha01 WANG Rongbenl JIA Yan92 JIN Lishen91 GUO Liel (1.Transportation College,Jilin University,Changchun 1 30025;
为了进一步提高悬架的性能,本文提出了一种 创新型的月球车悬架机构——正反四边形悬架。同 时,针对传统车轮存在的问题,开发出一种能够根 据土壤特性自动调节车轮状态的可变车轮——伸缩 叶片复式步行轮。
1正反四边形悬架设计
由于摇臂式悬架经历过火星环境的考验,具有 很强的实用性。因此在设计新型悬架时,有必要将 其作为参考。 1.1正四边形机构设计
verify above performances.The result shows that the innovative locomotion system not only has strong climbing capability and call keep cab relatively smooth during climbing,but also can enhance the tractive capability as far as possible under the poor trafficability road candition and decrease the energy consumption and vibration under the good trafficability road candition. Key words:Innovative locomotion system Suspension Wheel Lunarrove系数且足l>O。则必然可以通过 选择三5的长度使疋l一7乏>0。