月球车行走系统设计
摇臂转向架式月球车移动系统的拓扑设计及仿真分析
1 言 引
月球 车用 于未来 的深空探测任务 ,与传统 的移动机器人不 月球车的工作环境决定 的Ⅲ 。月面是一个极其复杂、 不确知的( 或
3月 球 车移 动 系统 的拓 扑设 计 及分 析
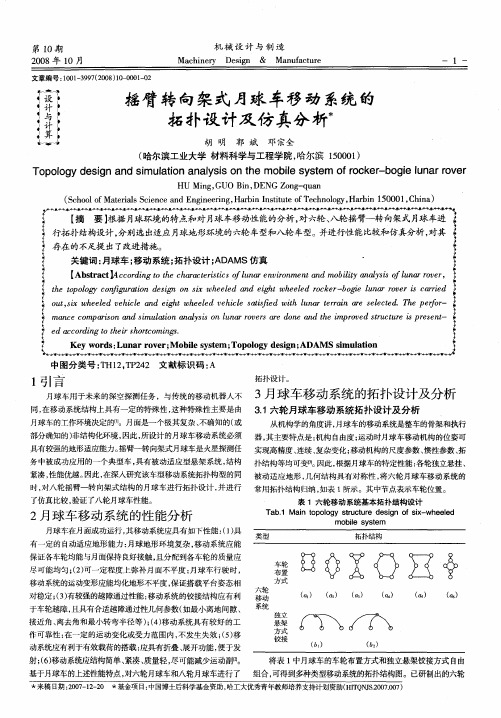
从机构学的角度讲 , 月球车的移动系统是整车的骨架和执行
同, 在移动系统结构上具有一定 的特殊性 , 这种特殊性主要是 由 31 . 六轮月球车移动系统拓扑设计及分析 部分确知的) 非结构化环境 , 因此 , 所设计的月球 车移动系统必须 器 , 其主要特点是 : 机构 自由度 ; 运动时月球车移动机构 的位姿可 具有较强的地形适应 能力 。 摇臂—转 向架式月球车是火星探测任 实现高精度 、 连续 、 复杂变化 ; 移动机构的尺度参数 、 惯性参数 、 拓
‘
{
【 bt c]cod g o h hr t ii l a ev om n ad oitaa s l a r e, ; A s at cri e a c r tsf u r ni n e tn b i l io u ro r r A n t t c a e sc o n r m l n ys y f n v
iot i wel eieade h w el eie ase i n ri a e c d Te e o u,x he dvhc i t he dvh ls i dwt l a trnr sl t . h rr s e ln g e c t f i h ur e a e e e p f 一;
lt ply o gri e o c hedadeh wee ce-oeua Fe ic rd 2 h t og n u tnds ns ee gt hedrkrb il r o rs ai eo o c f ao 忉 i bw l n i l o g n y r e
工程月球车的设计方案

工程月球车的设计方案摘要随着人类对外太空的探索不断深入,工程月球车的设计与制造已成为一个迫切的需求。
本文将介绍一款用于月球探测与科学研究的工程月球车的设计方案。
该月球车将具备行驶、操控、采集样本、传感器监测等多项功能,以满足人类对月球环境的探索需求。
1. 引言自20世纪之初,人类就对月球进行了广泛的科学研究,特别是在上世纪60年代末,美国和苏联分别成功地进行了载人登月任务。
自此之后,对月球的研究更是广泛展开。
为了更深入地了解月球表面的地质构造、地质活动以及与地球的相似性,月球探测车(月球车)的设计与制造变得极为重要。
2. 设计目标本设计方案将针对工程月球车的主要设计目标进行分析。
月球车需要满足以下基本目标:1)能够在月球表面行驶并且能够适应不同的地形环境;2)携带各种科学研究设备,如激光测距仪、地质钻探设备等;3)具备远程操控和自主导航能力;4)能够在极端环境下工作,如低温、真空等;5)具备样本采集和分析功能;3. 结构设计工程月球车整体结构设计分为底盘、动力系统、悬挂系统、传动系统等几大部分。
底盘设计:底盘设计应具有足够的强度和刚度,以支撑月球车整机。
采用轻质合金材料作为底盘材料,并且加强关键连接处的焊接连接,以保证整机的稳固性和耐用性。
动力系统:考虑到月球表面的复杂地形,月球车的动力系统应该具备较强的通过性和悬挂适应性。
采用四轮驱动,同时结合电动发动机和太阳能电池板作为能源,并配置强有力的悬挂系统,以增加车辆的通过性和操控性。
传动系统:传动系统负责将动力从电动发动机传输到车轮,需要具备较高的效率和可靠性。
采用先进的齿轮传动设计,以保证传动效率和传动寿命。
4. 功能设计月球车需要具备丰富的功能以满足科学研究的需求,包括采样、分析、传感器监测等。
采样系统:月球车需要能够在月球表面采集地质样本并进行分析。
通过装备高精度激光测距仪,携带地质钻探设备等,以实现对地质样本的采集和分析。
传感器监测:月球车需要装备多种传感器,如温度传感器、湿度传感器、气压传感器等,以对月球表面的环境参数进行监测。
创造中的中国月球车

创造中的中国月球车中国科学院院士、中国月球探测首席科学家欧阳自远曾经在2007年表示,中国已完全具备开展月球探测的能力,并计划在13年内实现不载人月球探测计划。
2012年,中国月球探测“嫦娥工程”中最重要的角色月球车将在月球上的某个月海登陆。
在2006年10月31日开幕的第六届中国国际航空航天博览会(珠海航展)上,中国月球车首次现身。
在实验室里,这个重要角色的学名是“月球探测远程控制机器人”。
月球车的职责作为登月探测的一个重要实施者,月球探测车是中国月球探测工程中的一个重要项目。
月球车自主研究开发的意义在于:它是着陆探测和取回样品的关键工具,是长期实地考察的需要,为未来深空探测奠定技术基础,可大大节省探测成本。
“嫦娥工程”三期无人探月计划中,在第一期“绕月探测工程”实施的过程中并没有月球车的身影。
它要到第二期“落月”时才会露面,并在随后的一段时间里和第三期“返回”中大展身手。
2009年~2015年,中国将进入“嫦娥工程”第二期,届时将进行两到三次的软着陆巡视勘查,其中2012年向月面发射一个软着陆器的计划已经基本确定。
按照这一计划,软着陆器将携带载有摄像机和多种探测仪器的月球车。
在月球表面巡视勘查,为建立月球基地收集基本数据资料。
为中国探月工程做出贡献。
目前中国进行此项任务的技术实力、物资条件和经济实力都已基本具备。
第三期工程大约在2010年~2017年展开,月球车将再次登陆月球。
这一次它不仅要采集月壤和岩石的样本,还要搭乘返回舱重返地球。
月球车技术复杂顾名思义,“车”不仅要能移动,还能承载一定的重量。
在这一点上,地球车、月球车都一样。
但是,月球车的应用范围和性能要求,又与地球车大不相同。
它不但要具备在低重力情况下前进、后退、转弯、爬坡、取物、采样和翻转等基本功能,还必须具备识别、爬越、绕过障碍物、在月球上采集月壤并运载回指定地点等人工智能。
2007年3月,中科院自动化研究所专家表示:相对于美国有人驾驶的月球车技术,中国采取的是无人月球车技术路径。
基于半转步进机构的月球车移动系统的设计与分析

考文Βιβλιοθήκη 献 作者地址 :陕西省西安 市西安科 技大学机械工程学院
邮 编 :70 5 10 4 收稿 日期 :2 0 0 0 8— 4—1 7
—
1 李志学 .李若松 . A I C TA实验教 程 .北京 :清华大 学 出
《 起重运输机械》 2 0 (2 08 1 )
转臂为第 1 级半转机构 ,其中2 级转臂相当于基本
半 转机构 中的转 杆 。而 2级转 臂与跨 步杆 构成 第 2 级 的半转 机 构 ,其 中 2级 转 臂 相 当 于 基 本 半 转 机
构 中的转 臂 。
n o e p i ain. r a r v  ̄sa plc to
Ke wo d : l n rr v r mo in s se y r s u a o e ; t y t m; h l o a f—r t o o g r t n d n mi h a trsis o ̄in c n u ai ; y a c c a c eit i f o r c
况 和干 涉情况 ,进 一 步 实 现 可视 化 的设 计 和 分 析 ,
3 孙桓 ,陈作 模 .机 械原 理 .北 京 :高 等 教 育 出版 社 ,
20 6 o
对 实现并 行工 程具 有一 定 的意义 。
参
版 社 ,2 0 04
4 Fe aa ,C a e li i A I 5使用指 南 .北 r Kr d m h lsKe mt r s .C TA V
基 于 半 转 步 进 机 构 的 月 球 车移 动 系统 的设计与分析 木
陕 西科 技 大 学机 电工程 学院
摘
刘建 平
嫦娥四号月球车工作原理

嫦娥四号月球车工作原理
嫦娥四号月球车是中国探月工程中的一部分,其工作原理如下:
1. 自主导航:嫦娥四号月球车配备了多种导航传感器,包括测距仪、惯性导航单元、激光扫描仪等。
它可以通过测量周围环境的几何信息和参考物体的位置,来确定自己的位置和移动方向。
2. 越障控制:月球车的底盘上配备了多个驱动电机,每个驱动电机都连接着一个轮子。
月球车可以通过控制不同驱动电机的转速和方向,实现前进、后退、转向和越障等动作。
3. 太阳能供电:嫦娥四号月球车装有太阳能电池板,它可将太阳光转化为电能,供给月球车的各个系统工作。
月球车在夜晚无法工作时,会进入休眠状态,等待太阳升起再次充电。
4. 数据传输:月球车上配备了高频和低频天线,用于与地面控制中心进行数据通信。
地面控制中心可以远程控制月球车的移动,同时接收月球车的图像、科学数据等。
5. 科学探测:月球车搭载了多种科学仪器,例如高分辨率相机、光学谱仪、矿物探测仪等。
它可以对月球表面的地质构造、岩石成分和地下结构进行详细的观测和分析,为科学家提供重要的数据支持。
总体而言,嫦娥四号月球车通过自主导航、越障控制、太阳能
供电、数据传输和科学探测等关键技术,实现了在月球表面的移动和科学探测工作。
复式履带型月球探测车

5 月壤极 易掀起 大面积的扬尘 , . 对 仪器设备 的密封抗尘埃 要求 大大提高 ,
都带 来 了成 就感 , 我 们 为 自己 感 到 骄 傲 和 自豪 。
( 导老师: 希勇) 指 陈
本次改进工作重点
加 上 月 壤 十 分 松 软 , 石 遍 布 , 以 月 在车子 的重心和牢 固性 碎 所 球 探测车要有优异的越野能力。
大 量 有 关 太 空 、航 天 和 月 球 方 面 的 知
4月 表昼夜温 差超过 30C。月球 上行驶 , . 0 ̄ 结果发现 复式 履带具 有较好 的
越 车需要 承受 强烈 的温度 冲击 , 在结构选 机 动性 、 野 性 能 和 攀爬 性 能 。 材 上 必 需 采 用 抗 热 应 力 形 变 的 特 种 材
而又频 繁 ,布满
凹坑 和大小各异
的石 块 。这 就要 求 月 球 探 测 车要 有 灵 活 的避 障能 力 。 具有 了抓 取 功 .
需 太阳能装置 。 2月球表面重力加速 度为 123 即 导航 能力 , 要安装特 制的单极 雷达和 能。又安装上单极雷达 、 . 6 ., 人们所熟悉 的 1 / 6地球重 力加速度 。重 天 线 。
它 更 属 于 一 种 航 天 器 ,除 行 走 部 分 外 , 越 野能 力 , 们设计 了复式 履带 , 我 使之 心前移 了 ,但 是 明显有 头重 脚轻 的感
还有一般航天器所具有的各个分系统。 月球环境对月球车性能的要求 :
1月 球 地 形 .
更 能适合月球表面复杂 的路面状况 。为 觉。由此 , 我们认 为 , 担任为本作品中的 C 于是 我们 又 了防止 月表 的 碎石 嵌入 履带 和行 驶机 压轴的 R X应 当放在后部 ,
AADL对月球车导航系统的设计与建模

p r o d u c e t h e g r a p h i c a l r e p r e s e n t a t i o n o f t h e s y s t e m.
Ke y wo r ds AADL L un a r r o v e r Na v i g a t i o n s y s t e m Co mpo n e n t s OSATE
测量位置需要里程计 、 星 敏 感 器 以及 太 阳敏 感 器 的数 据 , 数 据 计
体 系结构分析设计语 言 A A D L于 2 0 0 4年 1 1月被批准 为工
业标 准 A S 5 5 0 6 , 是 一 种 支 持 文 本 和 图 形 方 式 的 建 模 语 言。
第3 0卷 第 1 1 期
2 0 1 3年 1 1月
计算 机 应 用与软件
Co mp u t e r Ap p l i c a t i o ns a n d S o f t wa r e
V0 1 . 3 0 No . 1 1
NO V .2 01 3
A AD L对 月 球 车 导 航 系统 的设 计 与建 模
组成 , 其 中测量 系统包括 了很多测 量部件 , 例如 陀螺仪 、 加 速度
计 以及一 系列的敏感器 , 控制系统包括制导 、 导航与控制计 算机 ( G N C C ) 、 电源分配器 ( S D C) 等, 执行 系统 包括一 系列 的驱动设 备, 例如推力器 、 驱动机等 。
来收集各种数据 , 数据会通 过系统 总线传 送到控 制系统 。控 制 系统会进行一 系列 的计算来确定 月球 车姿势 、 航 向和位置 , 然 后 进行路径规划 , 最后汇总所有 数据 通过另外 一条 总线输 出给执 行系统 , 从 而使月球车移 动。其 中测量月球 车的姿 势需要 陀螺 仪和加速度计 的数据 , 测量航 向需要太 阳敏感器和星历表数据 ,
面向行驶安全性的月球车行走系统FDTM总体设计

行走系统重 量约为 1 k :F T - 7g D M B也采用 了F T 基 本架 构, DM 对 FT- D M A前悬架单元结构做 了改动,运用 四连杆 式平衡悬架 结 构 来代 替杠 杆 式 悬架 结构 。另外 ,采用后平 台铰接转 向
● 两平 台布 置 :从越野 观 点看 ,车体 分段 铰接 布置 , 可 有 效 降低 车 辆 越 障 时质 心 位 置 的浮 动 量 , 使 得 车 辆 行 驶 更 加 “ 滑 ” 同 时 , 也 平 。 应当考虑多平台带来 的系统复
以下 理 念 : 1 设 计 出发 点 是 从 车 辆 地 面 力 学 出发 的 , 科 学 的 , 而 ) 不是 盲 目的 ;
●装 备 有 四 连杆 式平 衡 悬 架 :尽 管 美 国火 星 车 M R E 的悬 架 被 认 为 是 经 典 之 作 ,但 它 在 火 星 上 仍然 面 临着 难 以逾 越 的障 碍 。原 因在 于 这 种 悬 架 的 动 态载 荷 分 配 不 如 静 态 均匀 。F T D M设计 的四连 杆 式 平衡 悬 架 巧妙 地 解 决 了 铰 接 式 悬 架 运动 中轴 荷 分 布 不 均 的 缺 陷 。另 一 方 面 四 连 杆 具 有 一 定 的 活 动 空 间 , 车 轮 能 更 好 地 紧贴 障 碍物 轮廓 行驶 。实 验表 明 ,该种 悬架有 效地 避 免 了 M R悬架在 翻越 E 障碍时 的 “ 硬 ” 生 ,不 会 导致 车 轮 突 然 落 空 给 车 辆 带来 冲击 ( 45 。 图 - ) 针对月球 探测 的任务特 点 ,F T 还 可配置 以下额外的 DM 功 能。 ● 轮步式结合 的行走 方式:采用独立 的跨步 驱动方式 , 这样 的行走方式可 以克服 3 。的斜坡 。 O ●具有 展开能力 :也即底盘在运输 状态时成锁紧状态 , 在 工作状态时 ,可展开至运输状态 的 2 3倍体积 ,从而提高  ̄ 行 驶的稳定性 和越野 的通 过性能 ( ) 图6 。 根据行走系统 的总体选 型分析 ,我们设想 了基于 F T 行 DM 走 系统的三种 构型 ( 7 。 图 )
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
月球车行走系统设计
02011509——姜晓文
方案总体设计
◆1、车轮设计——普通车轮
◆2、悬架设计——双曲柄滑块联动悬架
◆3、车体设计——差速轮系
◆4、驱动电机和减速器——直流电机和行星齿轮减速器
车轮设计
普通车轮:普通轮系通常采用包容结构, 对直线牵引、转向驱动、检测等功能模块进行一体化设计与制造, 减少质量和增强可靠性。
行星车轮:越障能力强, 且有一定的地面自适应能力,但转向只能通过差速实现, 不如普通轮系灵活。
选择采用普通车轮,保证转向的灵活。
双曲柄滑块联动:相比于摇臂式的悬架,获得较好的越障能力和行走的平顺性。
选择采用双曲柄滑块联动悬架,保证一定的越障能力。
车体设计
差速轮系:车体采用差速轮系与左右车体固联,均化车体的俯仰角。
采用差速轮系,保证车体行驶的平稳性。
驱动电机和减速器
设计牵引电机和转向电机分别实现行走和转向。
牵引电机:采用直流电机和行
星齿轮减速器
转向电机:采用直流电机和行
星齿轮减速器和蜗轮蜗杆
◆车轮尺寸
◆悬架结构尺寸
◆电机的选择和行星齿轮减速器的传动比
——设计要求
◆最大外形尺寸:900mm(长)×600mm(宽)×450mm(高);
◆总质量不超过50kg
◆移动速度不小于0.1m/s
——月球地面情况的参考信息
◆1~3米的月球车大概会遇到25°斜坡,15~20cm高的障碍。
(可以一这个数据建立月球表面的模型和为满足一定的越障能力确定悬架的尺寸)
◆月球表面的滚动阻力系数0.35左右。
(结合月球表面的路面情况(干沙和坑洼)估计,还未在文献中找到可以参考的数值)
◆参考车轮的大小直径220mm 宽度100mm。
(车轮的直径大小会影响车轮转速和所需要的扭矩)
——悬架尺寸的设计
要满足前后轮的20cm的越障高度。
主摇臂:235mm
连杆1:234mm
连杆2:234mm
曲柄1:158mm
曲柄2:158mm
——电机和减速器的传动比的设计
驱动力的计算:
车的行驶阻力=滚阻+坡阻
F=F f+F i=Gφ=G(i+f)=mg(i+f)/2;月球上重力加速度g=1.63m/s^2
坡度i=tanð;倾斜角ð;滚阻f;
驱动力=行驶阻力
F t=F;空载质量50kg
预计月球车的最大载荷为100kg F=100X1.63X(0.35+0.46)/2=66.015N
驱动力F t=66.015N
——电机和减速器的传动比的设计
电机的选择计算:工作功率
P t=F t v (w);
电机的功率
P=P t/η;
η传递效率;
根据P值选择电机工作功率:
P t=F t v =6.6015.X0.1=6.602(w) MAXON行星齿轮减速器的传递效率
η1=0.65
联轴器的传递效率η2=0.98
η=η1Xη2Xη2=0.62426
P=6.602/0.637=10.58w
选取额定功率为15w的Maxon伺服电机型号为:267121
额定电压:24v
额定转速:2800r/min
方案的具体设计
——电机和减速器的传动比的设计
行星齿轮减速器选择:
车轮半径R
车轮转速n=60v/(2piR)
传动比i=额定转速/车轮转速根据传动比选择减速器车轮半径:110mm
车轮转速
n=60X0.1/(2piX0.11)=8.68r/ min
传动比i=1210/8.68=244
选择Maxon行星齿轮减速器型号:218418
减速比为256:1
能够承受的最大扭矩为:
0.15Nm
◆悬架的设计基本完成
◆牵引电机和行星齿轮减速器的计算已经完成
◆接下来的进度:
◆悬架的进一步计算(根据悬架的受力来确定悬架的截面宽度)◆转向的设计
◆构建三维模型。