第6章凸轮机构
机械原理:第6章 凸轮机构
的压力角α ? 3.求出r0 、s 和α之间的关系式?
本题目主要考察对基圆、压力角及位移等 基本概念的理解和压力角的计算方法。 解
(1)图示位置的r0 、s 和α如图。
(2)r0 、s 与α之间的关系式为:
tan
v e
lOP e 1
r02 e2 s s r02 e2
例3 图示为摆动滚子从动件盘形凸轮机构,凸轮为偏心圆盘, 且以角速度ω逆时针方向回转。
试在图上标出: 1. 凸轮基圆;
2. 升程运动角和回程运动角;
3. 图示位置时从动件的初始位置角
0和角位移 ;
4. 图示位置从动件的压力角α;
5. 从动件的最大角位移max 。
r0min
( d s)2 e2 tan[ ]
直动滚子从动件盘 形凸轮机构
凸轮基圆半径
r0
m in
s
d2s
d 2
式中
([ dx )2 ( dy )2 ]3/ 2
d
dx
d
.
d2 y
d 2
d
dy
d
.
d2x
d 2
条件 min
直动平底从动件盘 形凸轮机构
滚子半径的设计
考虑运动失真: rr 0.8min 考虑强度要求: rr (0.1 ~ 0.5)r0
以凸轮转动中心为圆心,以凸轮理论轮廓曲线上的 最小半径为半径所画的圆。半径用r0表示。 从动件从距凸轮转动中心的最近点向最远点的运动过程。 从动件从距凸轮转动中心的最远点向最近点的运动过程。 从动件的最大运动距离。常用 h 表示行程。
基本名词术语
(5)推程角 从动件从距凸轮转动中心的最近点运动到最远点时, 凸轮所转过的角度。用Φ表示。
第6章 凸轮机构
(3)该机构的最大压力角αmax与最小压力角 αmin;
(4)从动件的推程运动角和回程运动 角;
(5)从动件的最大速度vmax。
解
第二十八页,共36页。
解 (1) rbRO A8 03 050mm
(2) A 1 B 1 (1 1 10 2 5 )2 1 5 1.5 46 0 A 0B 0 (5 0 15 2 )2 1 5 5.7 51
例1 图示偏置直动滚子从动件盘形 凸轮机构中,凸轮以角速度ω 逆时 针方向转动。
试在图上画出: (1)画出理论轮廓曲线、基圆与偏距圆;
(2)标出凸轮图示位置压力角α1和位 移s1以及转过150°时的压力角α2 和位 移 s2 。
解
第十九页,共36页。
思路与技
本题目主要考察对凸轮廓线、基圆、偏距 圆、压力角及位移等基本概念的理解和对反转
0
ω
n
第八页,共36页。
从动件运动规律的选择与设计原则
从动件的最大速度vmax应尽量小
从动件的最大加速度amin应尽量小,且无突变 从动件的最大跃度jmax应尽量小
第九页,共36页。
凸轮机构的反转法原理
-ω
1
B0
ωO
B1 B 1
2
3
()s()
结论
B 3 B 2 B 2 B3
从动件尖顶相对凸轮的运 动轨迹形成了凸轮的轮廓曲 线。
hA 1B 1A 0B 08.8 4m 5 m
(3) max mi n 45
(4) ==180°
(5)当凸轮从从动件最低位置转过90°时, 从动件与凸轮的相对瞬心P至A点的距 离达到最大
A P O2 A3 02
vma x A P 13 024.4 22 m6m
第6章 凸轮机构及其设计习题
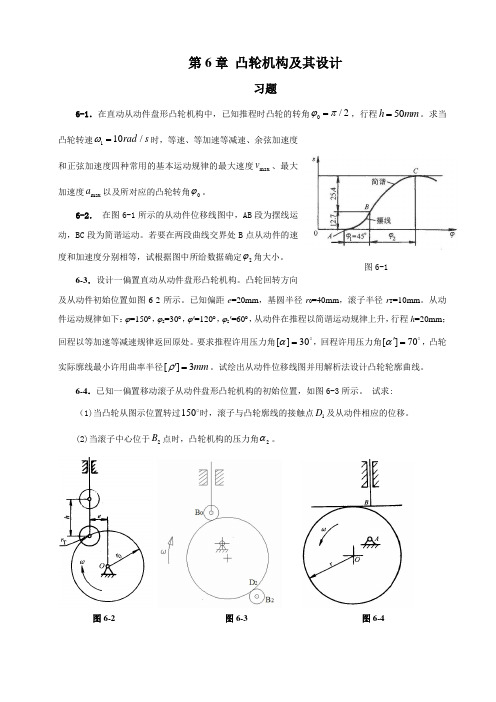
第6章 凸轮机构及其设计习题6-1.在直动从动件盘形凸轮机构中,已知推程时凸轮的转角0/2ϕπ=,行程50h mm =。
求当凸轮转速110/rad s ω=时,等速、等加速等减速、余弦加速度和正弦加速度四种常用的基本运动规律的最大速度max v 、最大加速度max a 以及所对应的凸轮转角0ϕ。
6-2. 在图6-1所示的从动件位移线图中,AB 段为摆线运动,BC 段为简谐运动。
若要在两段曲线交界处B 点从动件的速度和加速度分别相等,试根据图中所给数据确定2ϕ角大小。
6-3.设计一偏置直动从动件盘形凸轮机构。
凸轮回转方向及从动件初始位置如图6-2所示。
已知偏距e =20mm ,基圆半径r 0=40mm ,滚子半径r T =10mm 。
从动件运动规律如下:ϕ=150︒,ϕs =30︒,ϕ'=120︒,ϕs '=60︒,从动件在推程以简谐运动规律上升,行程h =20mm ;回程以等加速等减速规律返回原处。
要求推程许用压力角[]30α= ,回程许用压力角[]70α'= ,凸轮实际廓线最小许用曲率半径[]3mm ρ'=。
试绘出从动件位移线图并用解析法设计凸轮轮廓曲线。
6-4.已知一偏置移动滚子从动件盘形凸轮机构的初始位置,如图6-3所示。
试求:(1)当凸轮从图示位置转过150时,滚子与凸轮廓线的接触点1D 及从动件相应的位移。
(2)当滚子中心位于2B 点时,凸轮机构的压力角2α。
图6-2 图6-3 图6-4图6-16-5.如图6-4所示的直动平底从动件盘形凸轮机构,已知凸轮为30r mm =的偏心圆盘,20AO mm =,试求:(1)基圆半径和升程;(2)推程运动角、回程运动角、远休止角和近休止角;(3)凸轮机构的最大压力角和最小压力角;(4)从动件推杆的位移s 、速度v 和加速度a 的方程式;(5)若凸轮以110/rad s ω=匀速回转,当AO 成水平位置时推杆的速度。
机械设计基础.第六章_间歇运动机构
21 2 2
2
运动关系(运动特性系数τ ):
tm 21 z 2 t 2 2z
讨论:τ >0,z≥3
21 z 2 2 2z
(2)销数 K
在0~0.5 之间,运动时间小于 静止时间。
K ( z 2) 2z
讨论:τ <1 常用K=1
§6-1 棘轮机构
组成:棘轮机构主要由
棘轮2、驱动棘爪3、摇杆1、 止动爪5和机架等组成 。
工作原理: 原动件1逆时针摆动时,棘轮逆时针转动 原动机1顺时针摆动时,棘轮不动
类型1:运动形式来分
单动式棘轮机构(转动、移动) 齿式棘轮机构 双动式棘轮机构 可变向棘轮机构
棘条机构(移动) 钩头双动式棘轮机构
运动;
加工复杂;
刚性冲击,不适于高速。
应用于计数器、电影放映机和某些具 有特殊运动要求的专业机械中。
§ 6-4 凸轮式间歇机构(不讲)
图6-11 圆柱形凸轮间歇运动机构
此机构实质上为一个摆 杆长度为R2、只有推程 和远休止角的摆动从动 件圆柱凸轮机构。
蜗杆凸轮分度机构
凸轮如蜗杆,滚子如涡 轮的齿。
作业:
6-2、6-3
2z K z2
增加径向槽数z可以增加机构运动的平稳性,但是机构尺寸 随之增大,导致惯性力增大。一般取 z = 4~8。
几何尺寸计算,学会参考机械设计手册
§6-3. 不完全齿轮机构
不完全齿轮机构是由普通齿轮机构演化而成。如图 所示,主动轮1为只有一个齿或几个齿的不完全齿轮, 从动轮2由正常齿和带锁止弧的厚齿彼此相间组成。
(2)制动机构
在卷扬机中通过棘轮机构实现制动功能,防止
链条断裂时卷筒逆转。
机械设计基础 第六章 凸轮机构

6.2.1 凸轮机构的运动循环及基本名词术语
凸轮机构的一个运动循环大 致包括:推程、远休程、回 程、近休程四个部分
术语: 基圆 偏距 近休程 近休止角 推程 推程运动角 远休程 远休止角 回程 回程运动角 行程 推杆运动规律
6.2.2 几种常用的推杆运动规律
等速运动规律:
s h / 0 h 1 / 0 a0
凸轮廓线设计步骤: (1)划分位移曲线;
(2)取长度比例尺,绘出凸轮基圆,偏心距圆;
(3)获取基圆上的等分点; (4)绘出反转过程中的导路位置线;
(5)计算推杆的预期位移;
(6)将从动件尖顶点连成光滑曲线,即为凸轮轮廓。
理论轮廓线 实际轮廓线
尖顶从动件
滚子从动件
滚子半径的选择
滚子从动件作用: 1、化滑动摩擦为滚动摩擦; 2、降低凸轮与从动件之间的局 部接触应力。
6.3.2 压力角与凸轮机构尺寸的关系
tan
OC e
PC OP OC BC BC
BC s r02 e 2
P为凸轮和从动件的速度瞬心,故:
v OP
即: OP
v
ds d
于是:
tan
ds e d s r02 e 2
增大基圆半径或设置偏置均可减小压力角,
存在速度突变,加速 度及惯性力理论上将无穷 大,称为刚性冲击。用于 低速轻载场合。
等加速等减速运动规律:
s 2h 2 / 02 4h1 / 02 2 a 4h1 / 02
s h 2h( 0 ) 2 / 02 4h1 ( 0 ) / 02 2 a 4h1 / 02
第六章凸 轮 机 构

实际轮廓曲线出现一尖点,易磨损。
③ r <rr , rc= r - rr 此时, rc < 0
产生交叉轮廓曲线,从动件运动失真。
设计时
rr≤0.8rmin 及 rr≤0.4rb
小结
一、本章重点
① 凸轮的分类及应用; ② 凸轮机构的从动件常用运动规律; ③ 平面凸轮轮廓曲线的设计; ④ 凸轮机构基本尺寸的确定。
由图中的速度三角形知
vK 2 vK1 tan a rb sK tan a
tan
a
rb
vK 2 sK
由式可知:
rb↑ → a↓; rb↓ → a↑
a vK1
vK2
a K
rb
vK21 sK
因此,为改善机构受力情况,可使基圆半径适当取
大些,以使压力角a减小。
当对机构尺寸没有严格限制时可按下式选取基圆半 径
E j ,t
加速度虽突变,但为
a
有限值,“柔性冲击”
a0 AB
a0 C D E j ,t
三、简谐运动规律
质点在圆周上作匀 速运动时,它在该圆直 径方向上的投影所构成 的运动称为简谐运动。
s
h
A BC
F v
D E j ,t
s h 1 cos j
2
F
v hw sin j
2F F
a
h 2w2
2F 2
sina
j
从上式可以看到,为改善凸轮受力情况,应使压力
角尽可能小,并且在结构允许条件下,尽可能增大导轨
长度lb和减小悬臂尺寸la。
其他条件不变,则a增加,所需推力F增大。当a增
大到使上式分母为0时,即
机械基础习题5
第六章凸轮机构一、选择题1、凸轮机构中,主动件通常作()。
A、等速转动或移动B、变速转动C、变速移动2、凸轮与从动件接触处的运动副属于()。
A、高副B、转动副C、移动副3、内燃机的配气机构采用了()机构。
A、凸轮B、铰链四杆C、齿轮4、凸轮机构中,从动件构造最简单的是()从动件。
A、平底B、滚子C、尖顶5、从动件的运动规律决定了凸轮的()。
A、轮廓曲线B、转速C、形状6、凸轮机构中,()从动件常用于高速传动。
A、滚子B、平底C、尖顶7、凸轮机构主要由()和从动件等组成。
A、曲柄B、摇杆C、凸轮8、有关凸轮机构的论述正确的是()。
A、不能用于高速启动B、从动件只能做直线运动C、凸轮机构是高副机构二、判断题1、()在凸轮机构中,凸轮为主动件。
2、()凸轮机构广泛应用于机械自动控制中。
3、()移动凸轮相对机架作直线往复移动。
4、()在一些机器中,要求机构实现某种特殊复杂的运动规律,常采用凸轮机构。
5、()根据实际需要,凸轮机构可以任意拟定从动件的运动规律。
6、()凸轮机构中,主动件通常作等速转动或移动。
三、填空题1、凸轮机构主要有和。
2、在凸轮机构中,凸轮为。
3、在凸轮机构中,按凸轮形状分类,凸轮有、和。
4、凸轮机构工作时,凸轮轮廓与从动件之间必须始终,否则,凸轮机构就不能正常工作。
第七章轴 (一)一、选择题1、自行车前轴是()。
A、固定心轴B、转动心轴C、转轴2、在机床设备中,最常用的轴是()。
A、传动轴B、转轴C、曲轴3、车床的主轴是()。
A、传动轴B、心轴C、转轴4、传动齿轮轴是()。
A、转轴B、心轴C、传动轴5、既支承回转零件,又传递动力的轴称为()。
A、心轴B、转轴C、传动轴二、判断题1、()曲轴常用于实现旋转运动与往复直线运动转换的机械中。
2、()工作时只起支承作用的轴称为传动轴。
3、()心轴在实际应用中都是固定的。
4、()转轴是在工作中既承受弯矩又传递扭矩的轴。
5、()按轴的轴线形状不同,轴可分为曲轴和直轴。
6第六章常用机构

按用途和受力情况,螺旋机构又可分为传递运动、动力和用于调整等 三种类型;按螺旋副的摩擦性质,螺旋机构可分为滑动螺旋机构、滚动螺 旋机构和静压螺旋机构三种类型。 螺旋机构具有结构简单、工作连续平 稳、传动比大、承载能力强、传递运动准确,易实现自锁等优点,故应用 广泛。
螺旋机构的缺点是摩擦损耗大、传动效率低。随着滚珠螺纹的出现, 缺点已得到很大的改善。
如图6-28所示为自行车后轮飞轮中的内啮合单向驱动棘轮机构。
图6-29是控制牛头刨床工作台进与退的棘轮机构。 图6-30所示为摩擦式棘轮机构。
二、槽轮机构
槽轮机构由带销的主动拨盘、具有径向槽的从动槽轮和机架组成。 槽轮机构的停歇时间和运动时间取决于槽轮的槽数和拨销数。 槽轮机构可分为外槽轮机构和内槽轮机构,如图6-31、图6-32。
槽轮机构结构简单,工作可靠,转位方便,能精确控制转角,但转 角大小不可调节,且有冲击,只能用于低速机构或分度机构中。如图633所示为转塔车床的刀架转位机构。
第四节 螺旋机构
螺旋机构由螺杆、螺母和机架组成(一般把螺杆和螺母之一作成机 架),其主要功用是将旋转运动变换为直线运动,并同时传递运动和动力, 是机械设备和仪器仪表中广泛应用的一种传动机构。
2.导杆机构
若将图6-9所示的曲柄滑块机构的构件作为机架,则曲柄滑块机构就 演化为导杆机构,连架杆对滑块的运动起导向作用,称为导杆,它包括转 动导杆机构和摆动导杆机构两种形式。如图6-10所示,导杆均能绕机架作 整周转动,称为转动导杆机构。如图 6-11所示,导杆4只能在某一角度内 摆动,称为摆动导杆机构。导杆机构 具有很好的传力性能,常用于插床、 牛头刨床和送料装置等机器中。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
常用的凸轮材料 在轻载时,可用HT28-48或HT24-44灰铸铁; 中载或较大载荷时,可用50钢或40Cr,工作表面经高频淬火
到HRC52-58,或用15钢、20Cr、20CrMn渗碳淬火,渗碳层深度 为0.5—1.5(mm),视凸轮尺寸大小而定,然后淬火到HRC56—62;
重载时,可用40Cr先整体淬火到HRC30~40,再将工作表面 经高频淬火到HRC56~62。或用GCr-15钢,淬火到HRC59~63。
第六章 凸轮机构
§6∼1 凸轮机构的应用及其分类
一、凸轮机构的应用
1、凸轮机构: 凸轮是一个具有曲线轮廓
的构件。 含有凸轮的机构称为凸轮
机构。它由凸轮、从动件和机 架组成。
2、凸轮机构的应用 内燃机配气凸轮机构
凸轮机构的优点:
只需确定适当的凸轮轮廓曲线,即可实现从动件复杂的运 动规律; 结构简单,运动可靠。
1、对于中、低速运动的 凸轮机构,要求从动件的 位移曲线在衔接 处相切,以保证速度曲线的连续。
2、对于中、高速运动的凸轮机构,则还要求从动件的 速度曲线在 衔接处相切,以保证加速度曲线的连续。 五、从动件运动规律设计要点: 1、从动件的最大速度vmax要尽量小; 2、从动件的最大加速度amax要尽量小; 3、从动件的最大跃动度jmax要尽量小。
应有利于减小从动件工作行程时的最大压力角。为此应使从动 件在工作行程中,点C和点P位于凸轮回转中心O的同侧,此时凸轮 上C点的线速度指向与从动件工作行程的线速度指向相同。 偏距不宜取得太大,一般可近似取为:
e
=
1 Vmax − Vmin
2
ω 1
<
rb
三、凸轮基圆半径的确定
加大基圆半径,可减小压力角,有利于传力 。 设计时,机构受力较大,对其尺寸又没有严格的限制,可根
形锁合的凸轮机构
靠凸轮封闭几何形状 使凸轮与从动件接触
沟槽凸轮机构
等宽凸轮机构 等径凸轮机构
四)、根据从动件的运动形式分类
移动从动件凸轮机构 摆动从动件凸轮机构
§6―2 从动件常用运动规律
运动循环的类型
S(ψ)
S(ψ)
φ
φ
升—停—回—停型
升—回—停型
S(ψ)
S(ψ)
φ
φ
升—停—回型
升—回型
从动件的运动规律的数学方程式
rB 2
−
e2
+
⎤ ⎥ s⎥⎦
B点相对于B1点转了-φ角度
平面旋转矩阵:
[R]
=
⎡cos(−φ) ⎢⎣ sin(−φ)
⎡ ⎢⎣
xB yB
⎤ ⎥⎦
=
[R].⎢⎣⎡
xB1 yB1
⎤ ⎥⎦
− sin(−φ)⎤ cos(−φ) ⎥⎦
=
⎡ cos φ ⎢⎣− sin φ
sin φ⎤ cos φ⎥⎦
⎡ xB
⎢ ⎣
⎤
⎥ φ⎥⎦
注意: 1) 若从动件导路相对于凸轮回转中心的偏置方向与x方向同向, 则e>0, 反之e<0。 2)若凸轮逆时针方向转动,则ϕ>0,反之ϕ <0。
教材上是用极坐标系求解,可自己看。
瞬心:互作平面相对运动的两构件上在任一瞬时其 相对速度为零的重合点,即作平面相对运动的两构 件上在任一瞬时其绝对速度相等的重合点。
缺点: 从动件与凸轮接触应力大,易磨损
用途: 载荷较小的运动控制
二、凸轮机构的分类 一)按凸轮的形状分类
盘形凸轮
移动凸轮
二)按从动件上高副元素的几何形状分类
圆柱凸轮
圆锥凸轮
尖顶从动件 对心放置
滚子从动件 偏心放置
平底从动件
1
三)、按凸轮与从动件的锁合方式分类 力锁合的凸轮机构 用弹簧,重力保持凸轮与从动件接触 。
相对速度必定沿接 触点t-t切线方向
P12
P12
高副瞬心在接触点的公法线上
§6–4 盘形凸轮机构基本尺寸的确定 一、凸轮机构的压力角
对心凸轮机构 e=0
α ↑→ 正压压F ↑→ 摩擦力f ↑→自锁
工作行程: [α] ≤ 30° ~ 45° 回 程: [α] ≤ 70° ~ 80°
rb S0
二、偏距e的大小和偏置方位的选择原则
据实际轮廓的结构和强度确定基圆半径rb,然后校核压力角。
4
四、滚子半径的确定
§6-5 空间凸轮机构设计
rr ≤ ρmin
rr = ρmin
一般,设计时满足下式:
rr ≤ 0.8ρmin rr ≤ 0.4rb
rr ≥ ρmin
§6-6凸轮机构的结构设计(了解)
一、凸轮的结构及其与轴的联接
根据凸轮的使用要求、尺寸大小、加工工艺及调整和更换的方 便性等,凸轮结构可做成整体式或组合式的。
滚子材料可用20Cr,渗碳深度为0.8~1.2(mm),淬火到 HRC55~60,或用GCrl5钢,淬火到HRC59~63,也可用工具钢 T8A,淬火到HRC55~60。轻载,低速的凸轮机构,可用尼龙作 滚子材料。
滚子心轴材料可用20Cr,渗碳,深度为0.8~1.2(mm),淬 火到HRC56~62,也可用45钢,淬火到HRC42~45。
§6‐3 根据预定运动规律设计盘形凸轮轮廓曲线
一、图解法设计盘形凸轮机构 1.移动从动件盘形凸轮机构 轮轮廓曲线设计的基本原理(反转法)
设计步骤: 1.等分位移线图横坐标,得φ1,φ2…. ; s1,s2…; 2.以O为圆心,以rb为半径作基圆,以e为半径作偏距圆;
滚子从动件凸轮轮廓曲线设计
3.作从动件中心线与e圆相切;
a=0
⎪
⎪⎭
特点:两端→∞, 称刚性冲击
2
二、等加等减速运动规律
s
=
2h φ2
φ
2
v
=
4hω φ2 φ
⎫
⎪ ⎪ ⎪ ⎬ ⎪
a
=
a0
=
4hω2 φ2
⎪ ⎪⎭
等加速段 (AB段)
s v
= =
h4φ−hω2φ2(h2(φφ- φ- φ))2 ⎪⎪⎪⎪⎬⎫
等减速段 (BC段)
a
=
−a0
=
−
4hω2 φ2
⎪ ⎪⎭
yB
⎤ ⎥ ⎦
=
[R].⎢⎡
⎣
xB1 ⎤
yB1
⎥ ⎦
=
⎡ cosφ ⎢⎣− sin φ
sin φ⎤ ⎡e
⎤
cos φ⎥⎦.⎢⎢⎣
⎥ rB2 − e2 + s⎥⎦
⎡ xB ⎢⎣ yB
⎤ ⎥⎦
=
⎢⎡e cosφ + ( ⎢⎣− e sin φ +
(
rB2 − e2 + s) sin φ rB2 − e2 + s) cos
特点:在ABC点加速度突变,称柔性冲击
三、简谐运动规律
s
=
1 2
(1
−
π cosφφ)
v = hπ2φωsinφπφ
⎫
⎪ ⎪ ⎪ ⎬ ⎪
a
=
hπ2ω2 2φ2
π⎪ cosφφ⎪⎭
特点:当作连续的升→降 →升往复运动时,才可获 得连续的加速度曲线,无 冲击。适用于高速传动。
四、组合运动规律简介
运动规律组合应遵循的原则:
4.沿 -ω等分e圆,作一系列中 心线与e圆相切;
5.在对应中心线量取s1,s2…作 点; 6.用光滑曲线连接各点。
3
2. 摆动从动件盘形凸轮机构 (反转法)
二、解析法设计盘形凸轮机构 尖顶移动从动件盘形凸轮机构
建立平面直角坐标系xoy
⎡xB1 ⎤ ⎢⎣ yB1⎥⎦
=
⎡e ⎢⎣s0
+
⎤ s⎥⎦
=
⎡e ⎢ ⎢⎣
位移 速度 加速度 跃动度
S = f (φ) v = ds = ds dφ =ω ds
dt dφ dt dφ
类速度 类加速度
a = dv = dv dφ =ω2 d 2s
dt dφ dt
dφ2
类跃动度
j
=
da dt
=
da dφ
dφ dt
=ω3
d 3s dφ3
一、等速运动规律
s = φh φ
⎫ ⎪
⎪
v = v0 = φhω⎪⎪⎬
凸轮与滚子的表面粗糙度为Ra0.63~0.08(µm),高精度和 高速凸轮机构的表面粗糙度应键槽应开在凸轮向径最大的方位
二、凸轮机构的材料及其热处理 对凸轮和推杆材料的要求中最重要的是高硬度,耐磨损。此
外,还要求有足够的强度,抗腐蚀、摩擦小,便于加工。推杆与 凸轮轮廓的接触部位小,磨损较大,但形状比凸轮简单,磨损后 更换时比更换凸轮简便而经济,故一般应使推杆底部的硬度略低 于凸轮的硬度。