基于AVR单片机的
基于AVR单片机的专业设备示教训练系统设计
由于各种 条件限制 , 专业实装设备型号 、 数量远远不能满足教学训 练需求 , 研制示教训练系统是运用现代教育技术 , 采取模 拟化 、 网络化 、 形象化 的教学手段 , 解 决专业 教学训练 中的实际问题 , 节约教学训练成 本 ,提高教学训练质量 和效果 。
一
示教训练 系统 的设计主要包括示教设备机箱内 A V R单片机控制系 统设计 、数据模拟通道控制设计与语音模拟通道控制设计 。
( 二 )先进性原则
果, 满足示教设备单机教学 、 训练需求 ; 研制数据、话音模 拟信道通模 块 ,在 A V R单 片机 系统 的控制下单片机以太 网接 口电路 、键盘按键 电 路和显示输出 电路等 , 实现示教设备功能响应 与语音通道通断控制 , 模 拟实装实话音 、数据信号的传输。
论基础 。
“ 配置参数对 象” 将 通过以太 网提交 到管理主机 中, 然后 同管理主机中
预先产生 的标准 “ 配置参数对象”进行 比较。如果 两个对象完全相 同,
就认 为参训者 的操作 配置结果完全正确 , 如果两个对象的数据存在着不
同, 就说 明参训者 的操作配置存在错误。
三、示教 训练 系统方案设计
( 三 )经济性原则
如果进行数据 、 语音通信的双方 ( 组 网时可以使多方 ) 操作都正确 , 管
理主机通过 T E L N E T 程序登陆到交换机的 I O S 上, 将 对应终端 在交换机
上的接人端 口打开 , 从 而建立各数据终端 间的模拟数据通道。
在数据通信过程中 , 如有任何一方的操作 改变 了参数设置 , 训练 管 理主机将监控到该操 作并做 出判断 ; 如在实装 中该参数设置更改会引起 数据通信的 中断 ,训练管理主机将通 过 T E L N E T程 序向交换 机的 I O S 发出关闭相应模拟数 据终端接 入端 口的指令 , 从 而断开对应数据终端 间 的模拟数据通道。
基于AVR单片机的舵机比例驱动电路的设计
图
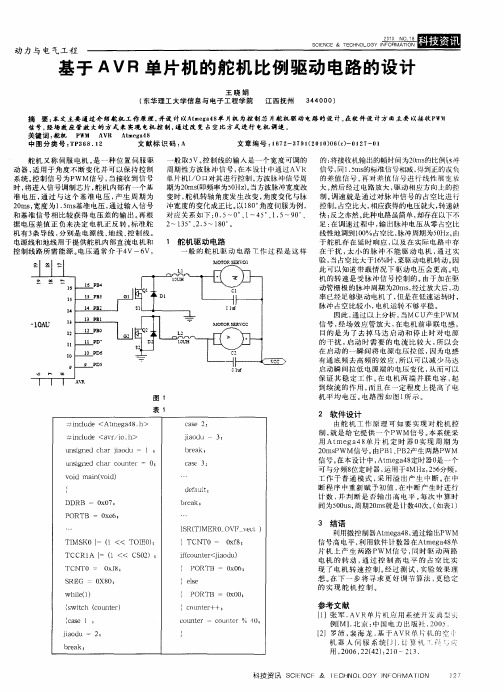
的: 将接收机输 出的帧时 间为2ms 0 的比例脉冲 信号 , .ms 同1 5 的标 准信号相减 , 得到正的或m 的荠 值信 号 。 再对 差值 信号 进行 线 性 展宽 放 大。 后经过 电路 放 大 , 动相应 方 向上的控 然 驱 制。 调速 就 是 通过 对脉 冲信 号的 占空 比进 行 控 制。 占空 比大 , 应获得的 电压就大 , 速; 相 转 } J 『 快; 反之亦然 。 此种 电路 虽简 单, 却存在以 下不 2~ l 5。、 5~ l 0。 3 2. 8 足: 在调 速过 程 中 , 出脉 冲 电压 从零 占空 比 输 线性 地调到 10 占空 比, 冲周期为5 Hz 山 0% 脉 0 。 1 舵机驱 动电路 于 舵 机存 在 延时 响 应 , 及在 实 际 电路 中存 以 般 的 舵 机 驱 动 电 路 _ 作 过 程是 这样 在 干 扰 , 小 的脉 冲不 能 驱 动 电机 , 过实 f = 太 通 验, 当占空 比大于 1 % , 6 时 菜驱 动 电机 转动 。 因 此 可以 知 道带 载 情况 下 驱 动 电压会 更 高 。 电 机 的转 速是 受 脉 冲信 号 控 制的 。 由于 加在 驱 动管栅 极 的脉冲 周期 为2ms 经过放 大后 , 0 , 功 率 已经足够 驱 动 电机 了, 但是 在低速 运转 时 , 脉冲 占空 比较 小 , 电机 运转 不够 平稳 。 因此 , 通过 以上 分析 , 当Mc U产生 P wM 信号 , 经场 效 应管 放 大 , 电机 前 串联 电感 , 在 目的是 为 了去 掉 马 达 启动 和 停 止 时 对 电 源 的干 扰 , 启动 时 需 要 的 电 流 比较 大 , 以 会 所 在 启 动 的一 瞬 间将 电源 电压拉 低 , 因为 电感 有 通 底频 去 高 频 的效 应 , 以可 以减 少 马达 所 启动 瞬 间拉 低 电源 端 的 电压 变化 , 从而 可 以 保 证 其 稳 定 工 作 。 电 机两 端并 联 电容 . 在 起 到续 流 的作 用 , 且 在一 定 程 度上 提高 了电 而 机平均电压。 电路 图 如 图 l 示 。 所 T
基于AVR单片机的智能信息记录仪设计
第4 期
电子元 器 件 主 用
Elcr n cCo o e t D v c p i ain e t i mp n n & e i eAp l t s o c o
V0 .2 No4 1 . 1
Apr .201 0
2 1 年4 O 0 月
d i O3 6 /i n1 6 - 7 52 1 . . 6 o: .9 9 .s . 3 4 9 .0 00 0 l js 5 40
要 任务 是 完成 开关 机 时间 的查 询显示 。在 空 闲时
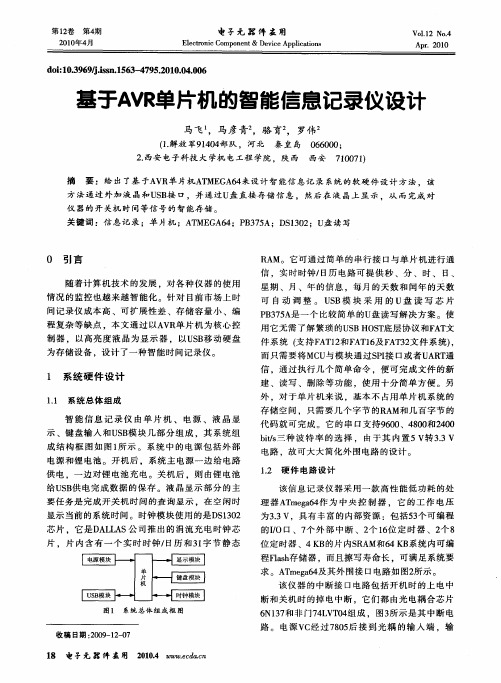
该 信 息记 录 仪器 采用 一款 高性 能 低 功耗 的处 理 器A mea 4 为 中央 控 制 器 。它 的 工 作 电 压 T g6 作
显 示 当前 的系统 时 间。时钟 模 块使 用 的是D 10 S3 2 芯片 .它 是 D L A A L S公 司推 出 的涓流 充 电时钟 芯 片 ,片 内含 有 一 个 实 时 时 钟/ 日历 和 3 字 节 静 态 1
0 引 言
随着计 算 机技 术 的发展 ,对各 种仪 器 的使 用
情 况 的监 控也 越来 越 智能 化 。针对 目前 市 场上 时 间记 录仪 成本 高 、可 扩展性 差 、存 储容 量 小 、编 程复 杂等 缺点 。本 文 通过 以A R 片机 为核心 控 V 单 制器 .以高 亮度 液 晶 为显 示 器 .以U B 动硬 盘 S移
方 法通过 外加 液 晶和U B 口 ,并 通过 U 直接 存 储信 息 ,然后 在 液 晶 上显 示 ,从 而 完成对 S接 盘 仪 器的开 关机 时 间等信号 的智 能存储 。 关键词 :信 息记 录 ;单 片机 ;A ME A 4 B 7 A;D 1 0 ;U 读写 T G 6 ;P 3 5 S 32 盘
基于AVR单片机的智能插座的设计与实现
0 引言随着城市化进程的加快,智能家居越来越深刻的影响着我们的生活。
随着用电设备在日常生活中的大量应用,用电器的工作情况越来越成收到用户的关注。
以单片机技术为基础构成的电流及功率检测技术在用电器实时检测领域得到越来越多的应用。
本文设计并实现了一个基于AVR 单片机的智能插座,用于检测220V 用电器工作时的实时电流和功率。
智能插座由插座、AVR 单片机、ZMCT103B/C 电流互感器组成。
是一种高效,远程化,低成本的智能插座解决方案,具有一定的实用性。
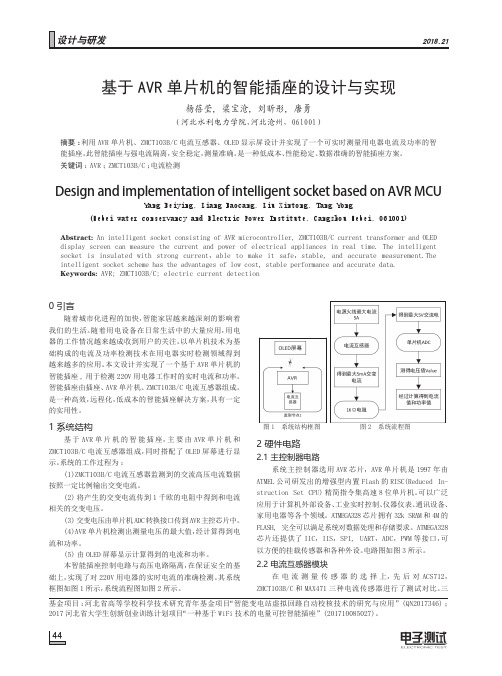
1 系统结构基于AVR 单片机的智能插座,主要由AVR 单片机和ZMCT103B/C 电流互感器组成,同时搭配了OLED 屏幕进行显示。
系统的工作过程为:(1)ZMCT103B/C 电流互感器监测到的交流高压电流数据按照一定比例输出交变电流。
(2)将产生的交变电流传到1千欧的电阻中得到和电流相关的交变电压。
(3)交变电压由单片机ADC 转换接口传到AVR 主控芯片中。
(4)AVR 单片机检测出测量电压的最大值,经计算得到电流和功率。
(5)由OLED 屏幕显示计算得到的电流和功率。
本智能插座控制电路与高压电路隔离,在保证安全的基础上,实现了对220V 用电器的实时电流的准确检测。
其系统框图如图1所示,系统流程图如图2所示。
图1 系统结构框图 图2 系统流程图2 硬件电路2.1 主控制器电路系统主控制器选用AVR 芯片,AVR 单片机是1997年由ATMEL 公司研发出的增强型内置Flash 的RISC(Reduced In -struction Set CPU)精简指令集高速8位单片机。
可以广泛应用于计算机外部设备、工业实时控制、仪器仪表、通讯设备、家用电器等各个领域。
ATMEGA328芯片拥有32k SRAM 和4M 的FLASH, 完全可以满足系统对数据处理和存储要求。
ATMEGA328芯片还提供了IIC,IIS,SPI, UART,ADC,PWM 等接口,可以方便的挂载传感器和各种外设。
基于AVR的遥控小车的设计

基于AVR的遥控小车的设计引言本文将介绍基于AVR单片机的遥控小车的设计。
遥控小车是一种具有较高自主性的机器人,可以通过遥控器实现远距离操控。
这种小车在各个领域都有广泛的应用,如智能家居、仓库物流等。
本文将介绍遥控小车的硬件设计、软件设计以及实现过程。
硬件设计1. 硬件组成遥控小车的硬件主要包括以下几个部分: - AVR单片机:用于控制整个小车的运行逻辑。
- 电机驱动模块:用于控制小车的移动,一般通过PWM信号控制电机的速度和方向。
- 电源模块:为遥控小车提供供电,可以使用锂电池、直流电源等。
- 传感器模块:用于感知周围环境,如红外线传感器、超声波传感器等。
2. 连接方式遥控小车的硬件部分需要通过电路板进行连接。
一般来说,AVR单片机与其他硬件模块之间的连接方式包括以下几种: - GPIO口连接:使用GPIO口实现单向或双向的数据传输。
- SPI接口连接:通过SPI接口进行数据传输。
- UART接口连接:使用UART接口进行串口通信。
- I2C接口连接:通过I2C接口进行数据传输。
硬件连接时需要注意各个模块之间的电平匹配和信号调制,以保证数据传输的正确性和稳定性。
软件设计1. 控制逻辑遥控小车的控制逻辑一般包括以下几个部分: - 遥控信号接收:通过遥控器接收到的信号来判断小车的运行指令,如前进、后退、左转、右转等。
- 数据处理:将接收到的信号进行处理,转换为相应的控制命令。
- 电机控制:根据控制命令控制电机的运行,如改变电机的速度、方向等。
2. 编程框架AVR单片机的软件设计一般使用嵌入式C语言进行编写。
常用的编程框架有以下几种: - Arduino:适合初学者,提供了丰富的库函数和示例程序。
- AVR Studio:适合有一定经验的开发人员,提供了更加灵活的开发环境和工具链。
在软件设计过程中,需要注意内存使用、任务调度等问题,以保证程序的稳定性和效率。
实现过程1. 硬件搭建首先,根据设计需求选择合适的硬件模块,并进行适当的连线和固定。
基于AVR单片机的电动云台控制器设计
基于AVR单片机的电动云台控制器设计
电动云台是一种用于摄影、舞台灯光以及监控等领域的设备,它能够实现云台的旋转和倾斜,从而实现摄影机或其他设备的远程控制。
为了实现对电动云台的精确控制,本文设计了一种基于AVR单片机的电动云台控制器。
首先,本文选用了AVR单片机作为控制芯片。
AVR单片机具有功耗低、成本低以及易于编程等优势,非常适合作为电动云台控制器的核心芯片。
其次,本文设计了电动云台的控制电路。
该电路包括电机驱动模块、编码器模块以及传感器模块等。
电机驱动模块用于控制电动云台的旋转和倾斜,编码器模块用于测量电动云台的角度,传感器模块用于获取环境信息,如温度、湿度等。
在软件设计方面,本文采用了嵌入式C语言进行编程。
首先,通过编程将AVR单片机与各个模块进行连接,实现数据的传输和控制信号的输出。
其次,设计了电动云台的控制算法。
通过计算电动云台的角度和目标角度之间的差值,控制电机驱动模块的输出,从而实现对电动云台的精确控制。
最后,本文还设计了用户界面,用户可以通过界面输入目标角度,并实时监测电动云台的运动状态。
为了验证设计的有效性,本文进行了实验。
实验结果表明,基于AVR单片机的电动云台控制器能够实现对电动云台的精确控制。
无论是旋转还是倾斜,电动云台都能够按照设定的角度进行运动,并且能够快速响应用户的操作指令。
综上所述,本文设计了一种基于AVR单片机的电动云台控制器。
通过合理的硬件设计和软件编程,实现了对电动云台的精确控制。
这种控制器具有功耗低、成本低以及易于编程等优势,有望在摄影、舞台灯光以及监控等领域得到广泛应用。
基于AVR单片机的125kHz简易RFID阅读器设计
基于A VR单片机的125kHz简易RFID阅读器设计无线识别(Radio Frequency Identification,)是利用感应、电磁场或电磁波为传输手段,完成非接触式双向通信、猎取相关数据的一种自动识别技术。
该技术完成识别工作时无须人工干预,易于实现且不易损坏,可识别高速运动物体并可同时识别多个射频卡,操作快捷便利,已经得到了广泛的应用。
目前存在的一些读卡器,都需要读卡芯片作为基站,成本较高。
本文介绍了一种采纳分立元件构成的125 kHz RFID阅读器,结构容易,成本极低,用于读取EM4100型ID卡。
1 RFID系统的分类RFID系统的分类办法有无数,在通常应用中都是按照频率来分,按照不同的工作频率,可将其分为以下四种:(1)低频(120~135 kHz)。
该频段具有很强的场穿透性,用法不受限制,性能不受环境影响,价格低廉,最大识别距离普通小于60 cm,主要应用于门禁、“一卡通”消费管理、车辆管理等系统;(2)高频(10~15 MHz)。
该频段与低频相比,具有防冲撞、能同时识别多个标签的优点,但其性能受环境影响,识别距离普通小于100 cm,主要应用于图书管理、物流等系统;(3)超高频(850~960 MHz)。
该频段较高频相比,具有可实现长距离识别的的优点,最大识别距离可达10 m,但其性能受环境影响较大,价格也较贵,主要应用于铁路车辆识别、集装箱识别等系统;(4)微波(2.45~5.8 GHz)。
该频段可实现远距离识别,识别距离可达100 m,但其价格也最贵,主要应用于智能交通系统中。
2 RFID系统的组成射频识别系统普通由阅读器、标签、天线三部分组成。
(1)阅读器:读取或读/写电子标签信息的设备,主要任务是控制射频模块向标签放射读取信号,并接收标签的应答,对标签的标识信息举行解码,将标识信息连带标签上其他相关信息传输到主机以供处理。
第1页共6页。
基于AVR单片机的精密温控系统设计

A me a 6单 片 机 、 热 装 置 、 示 、 警 电 路 及 R 一2 2串 T gl 加 显 报 S 3 口电路 组成 。 3 1 数 字 温 度 传 感 器 DS810 . 11 2 D 1 B 0是一种改进 型智 能数 字温 度传感 器 , S8 2 结构简单 ,
Pr c s e p r t r o t o y t m sg e ie t m e a u e c n r ls se de i n b sd o a e n AVR ir pr c s O m c O O es r
摘 要 : 文设 计 了一 种 基 于 Amea6单 片 机 的 精 密 温 控 系统 。 该 系 统 本 t gl
采 用 单 片机 为 核 心 控 制 器 。 进 型 智 能 温 度 传 感器 D 1 B 0完 成 对 温 改 S8 2
度信号 的采集 。 并把 采集 的信 号送 入单片 机进行 处理 。 实时显 示温 度 值 , 据 系统 设 定 完 成 相 应 的 智 能 控 制 。 根 关键词 :A R单片机 ;温度传感器 D I B 0 I V S8 2 ;PD00 2 c 转 换 时 问  ̄70 ; .6 5C, < 5 ms
( ) 电方式 可选 : 由数据 线供 电 , 可 由外部 电源供 3供 可 也
电 , 压 范 围 + . V~ +5 5 电 3O . V;
p o e s ri d sg d n t i ap r I hs s se 。we us ir - r c s o s e ine i hs p e . n ti y tm e m c o p o e s ras t k r e e telc mpo en . DS1 B2 ort m p r — r c s o he e n Ic n r o n t 8 0 f e e a
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
基于AVR单片机的
作者:李世琛田晓伟
来源:《硅谷》2012年第24期
摘要:主要从硬件组成和软件结构两个方面描述一种新型绿色节能照明控制系统的应用和实现方法,阐述了LED照明的可控、节能和高效等优越性,通过各种传感器检测的信号来实时控制LED照明,达到高效、舒适和人性化的办公或者生活照明环境。
关键词:绿色照明;传感器;控制系统
1 前言
在20世纪90年代初,绿色照明的概念是由美国国家环境保护局提出。
完整的绿色照明内涵包含高效节能,环保,安全,舒适等其他4个指标,缺一不可。
它具有高效的照明节能效益,可以消耗更少的能源,从而明显减少发电时排放的温室气体和有害气体,以达到环保的目的。
安全性,舒适性是是指不产生紫外线,眩光及有害光,没有光污染。
我国从上个世纪90年代后期开始启动绿色照明项目,并逐步弃用大部分诸如白炽灯等高功耗、高发热量的光源,但在智能、人性化控制绿色照明领域却比较落后,本文主要从硬件系统和软件系统的设计这两方面介绍一种新型的绿色节能照明控制系统。
2 硬件系统组成
本控制系统的硬件组成包括四个部分,分别是主控核心、LED照明及其驱动电路、传感器检测与转换电路、人机交互系统等组成。
本设计中主要由AVR单片机ATmega16A作为主控核心,该单片机属于ATMEL公司研发生产的增强型AVR单片机,具有高可靠性、功能强、高速度、低功耗等优点,采用RISC指令架构。
主控核心包括单片机最小系统、ISP下载电路等组成,最小系统是由外部时钟电路、复位电路组成,由于使用外部时钟电路,使得单片机工作更具可靠性、准确性和实时性,复位电路采用手动复位;ISP下载电路的作用是方便日后对控制系统的升级维护。
2.2 LED照明及其驱动电路
LED是发光二级管的英文简写,是一种能够将电能转化成光能的半导体器件,改变了效率低的白炽灯与日光灯的发光原理,采用电场发光,具有光效高、使用寿命长、辐射低和功耗低等优点。
另外LED非常适宜使用驱动电路由MCU控制,产生适宜的频率、光照强度的光线,控制模式和灯光组合多样化,适应不同的工作和生活环境。
控制LED发出比较适宜人眼的柔和光线是采用PWM控制方法,这种方法是利用MCU产生的一定频率的脉冲宽度可调节
的矩形波或者锯齿波,其核心思路就是改变电流值的大小而调节光线强度的。
目前只有少数的单片机比如AT89C51的51单片机不带PWM,而现在市面上很多增强型51单片机都有原生的PWM驱动,本文采用AVR单片机,产生PWM非常方便,执行效率高,配合LED的驱动电路产生不同光线的绿色光源。
本文主要检测人体信号、声音信号和环境光线信号,并将多种信号送入单片机进行逻辑分析控制LED。
检测人体信号的方法有多种,常见的商场、银行、医院等用的多普勒特征的人体目标雷达信号检测,人体感应热释电信号检测等,出于成本考虑,本设计中采用热释电传感器作为检测人体信号,该传感器主要原理是检测人体发出的红外线能量的变化转换成电信号输出,由于人体发出的红外线波长基本固定,所以避免误检测的几率。
检测声音信号使用常见的驻极体声电转换电路,将声音信号转换成电压波动进行放大后送入单片机进行检测,主要是判断环境的声音,由单片机判断是否进行照明。
检测环境的光线强度一般使用可硅光电池、光敏电阻、光敏二极管或者三极管等光敏半导体器件检测,因为检测出的电信号都需要进行放大后由ADC转换器把模拟信号转换成数字信号后送入单片机,故本设计中采用光敏电阻检测,由于AVR单片机具有16位ADC转换器,所以只需将电压信号送入单片机即可处理,然后判断环境光线强度后产生PWM信号驱动LED。
2.4 人机交互系统
作为与人与单片机进行交流的单元,主要是利用键盘和显示器来完成,本设计中采用4×4矩阵键盘作为输入设备,用于控制系统和设置系统参数等操作;采用液晶显示器LCM12864作为输出设备,用于输出系统的实时参数,如AD值、实时时钟等信息。
3 软件系统设计
系统软件采用C语言编写,开启BOD检测,利用ADC中断、定时器中断、16位定时器捕捉中断、快速PWM等编写键盘扫描子程序、A/D转换子程序、显示子程序、逻辑算法子程序等。
由于采用多种传感器检测环境非电量信号,故在判断多种信号的过程中,采用if-else逻辑方法进行控制LED,具体思路是,如果检测到环境声音信号,则判断在10秒内是否有人体信号,如果有,则判断环境光线强度,控制产生PWM信号驱动LED发光,通过光线传感器检测构成闭环控制,如果没有检测到人体信号,则等待声音信号。
当然可以通过键盘来启用和禁用某个传感器,也可以通过键盘来改变判断逻辑等。
4 结论
本设计主要是检测环境等各类非电信号,并将转换后的参数送入单片机进行控制,可以构成光照检测并对其补偿,达到智能化、人性化的要求,使绿色照明更加节能、易于控制。
由于成本控制,检测人体时有部分误差,可加入多普勒特征人体感应传感器可以大大提高人体检测的精确度。
参考文献:
[1]李泓,AVR 单片机入门与实践[M].北京:北京航空航天大学出版社,2007.。