基于Simulink的DSP仿真方法研究
基于dSPACE_MATLAB_Simulink平台的实时仿真技术研究

第1卷第3期System Simulation Technology V ol. 1, No.3 中图分类号:TP39 文献标识码:A基于dSPACE/MATLAB/Simulink平台的实时仿真技术研究雷叶红1, 2,张记华2,张春明2(1 华中科技大学,武汉,430074,2 上海精密仪器研究所,上海,200233)摘要:本文以某飞行器侧向通道稳定控制系统为例,基于dSPACE标准组件和MATLAB/Simulink软件环境,建立了控制系统的半实物仿真平台并进行了半实物仿真。
结果表明这种基于dSPACE的仿真系统具有构建便捷、高效和精度高等优点,尤其适用于数字控制系统。
关键词:MATLAB/Simulink;dSPACE;仿真平台;控制系统;半实物仿真A Real-Time System Simulation PlatformBased on dSPACE/MATLAB/SimulinkLEI Yehong1, 2,ZHANG Jihua2,ZHANG Chunming2(1 Huazhong University of Science & Technology, Wuhan, 430074, China,2 Shanghai Institute of Precision Instruments, Shanghai, 200233, China)Abstract: A simulation platform based on dSPACE components and MATLAB/Simulink is established. The platform system is applied in a hardware-in-the-loop simulation of a lateral channel flight control system. The results illustrate that the dSPACE real-time platform is convenient, efficient and accurate, especially suitable for digital control system.Keywords: MATLAB/Simulink;dSPACE;simulation platform;control system;hardware-in-the-loop simulation1 引言随着计算机技术和仿真技术的高速发展,实时仿真逐渐成为各种控制系统设计的重要手段。
基于MatlabSimulink的仿真方法研究
收稿日期:2000207207 作者简介:简清华(19612),男,江西新余人,工程师;从事计算机管理及其应用方面的教学工作。
基于Matlab Simulink 的仿真方法研究简清华,杨高波(华东交通大学电气与信息工程学院,南昌330013) [摘 要] 本文介绍了运用Matlab 工具箱之一的动态仿真工具Simulink 进行仿真的方法,并结合一个异步电动机的实例,对仿真过程中出现的一些热点问题如提高仿真速度、仿真结果分析等进行了深入的阐述。
同时对Simulink 与G UI 的接口也作了介绍。
[关键词] Matlab ;Simulink ;异步电动机[中图分类号]TP391.9 [文献标识码]A [文章编号]100020682(2001)0420041203R esearch on a simulation method on Matlab SimulinkJ I AN Qing 2hua ,Y ANG G ao 2bo(Electrical &Information School o f East China Jiaotong Univer sity ,Nanchang 330013,China ) Abstract :This paper presents a simulation tool called simulink ,one of the Matlab toolboxes.The paper al 2s o expounds s ome central issues ,such as how to im prove the simulation speed ,the analysis of simulation results and s o on during the simulation in combination with an exam ple of asynchronous m otor.The interface of simulink and G UI is als o discussed. K ey w ords :Matlab ;Simulink ;Asynchronous m otor Matlab 是Mathw orks 公司推出的当今国际上最为流行的软件之一。
基于simulink的DSB设计报告
哈尔滨商业大学课程设计报告基于SIMULINK的DSB仿真设计课程名称通信原理课程设计学生姓名指导教师年级专业2020级电子信息工程学院运算机与信息工程2011年08月26日课程设计任务书目录1仿真问题描述.............................................................................. 错误!未定义书签。
仿真任务................................................................................. 错误!未定义书签。
仿真原理................................................................................. 错误!未定义书签。
2仿真设计...................................................................................... 错误!未定义书签。
仿真方案................................................................................. 错误!未定义书签。
仿真建模................................................................................. 错误!未定义书签。
仿真参数设计......................................................................... 错误!未定义书签。
3仿真实验...................................................................................... 错误!未定义书签。
基于matlab simulink的系统仿真技术与应用

基于matlab simulink的系统仿真技术与应用
Matlab Simulink是一种用于仿真和分析各种复杂系统的建模仿真工具,它采用对象模型方法和图形化界面,极大地方便了工程师的仿真设计分析过程。
其电子工程仿真应用特别广泛,既可以模拟模型上的电路,还可以处理控制系统、数字系统、仿真信号、信号处理、通信系统及某些特定的设备系统,甚至可以构建一个模拟环境来建立系统对象、以模型象征性描述,进行逼真的仿真及调试。
Simulink仿真技术结合Matlab编程语言可用于系统建模实现,用于分析和仿真不同层次的复杂系统,有助于更好的理解的系统的构成和行为,为系统优化和综合设计提供帮助,并可以更好的准确地预测系统行为。
Simulink技术主要用于汽车控制、航空航天、船舶航行、航天实验、发动机控制、电力传输、机械系统、自动化控制、机器人控制等多个领域。
第五讲 基于MATLAB-Simulink的建模与仿真
MATLAB软件简介?
MATLAB软件的典型应用领域:
❖科学研究; ❖工程技术应用研究 ❖CAI(Computer Aided Instruct) ❖数学实验(Mathematical Experiment) ❖数学建模(Mathematical Modeling)
模型 Transfer-Fcn:线性传递函数模型 Zero-Pole:以零极点表示的传递
函数模型 Memory:存储上一时刻的状态值 Transport Delay:输入信号延时 一个给定时间再输出 Variable Transport Delay:输入 信号延时一个可变时间再输出
✓ 离散模块(Discrete)
For循环不能用For循环内重新赋值循环变
量n来终止。
在For循环中循环控制量的范围可以是任
何有效的MATLAB矩阵。比如
data=[11 9 45 6; 7 16 -1 5];
for n=data
x=n(1)-n(2)
end 这时程序的输出有四个数值,分别是矩阵
data的两列相减的结果
x = 4 x = -7
x = 46 x = 1
For循环可按需要嵌套,即For循环体内的命 令组中可以出现另一个For循环体,这体现了 For循环体也是命令组。比如 for n=1:5
for m=5:-1:1
A(n,m)=n^2+m^2; End
end
MATLAB软件简介?
While-end循环以不定的次数求一组语句的值。 Whil-end 循环的一般形式是: while expression(控制表达式) {commands} end 只要在控制表达式(expression)里的所有元 素为真,就执行While和end语句之间的命令 串({commands})。
在simulink下开发dsp
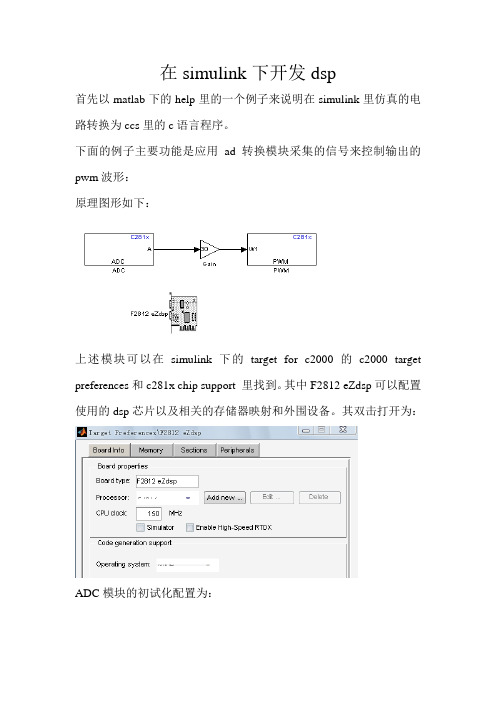
在simulink下开发dsp首先以matlab下的help里的一个例子来说明在simulink里仿真的电路转换为ccs里的c语言程序。
下面的例子主要功能是应用ad转换模块采集的信号来控制输出的pwm波形:原理图形如下:上述模块可以在simulink下的target for c2000的c2000 target preferences和c281x chip support 里找到。
其中F2812 eZdsp可以配置使用的dsp芯片以及相关的存储器映射和外围设备。
其双击打开为:ADC模块的初试化配置为:PWM模块的配置为:本例仅仅对采集进来的信号做了放大的作用,故只用了一个放大器。
在此基础上,打开窗口菜单的simlation里的configuration parameter,对其里的各个参数进行配置如图:首先对solver进行配置:其次是硬件配置(hardware implemenlation):这里最重要是对real-time workshop的配置:里面的配置如图:在以上配置好之后,确定并按ctrl+b,计算机将会在ccs环境下自动生成c语言代码。
如图:以上是基本的操作流程.。
个人的理解、体会及问题:整个过程是matlab里的embedded target for the ti tms320c2000 dsp platform模块,简称为ETTIc2000.此模块利用real-time workshop通过ccslink模块直接将simulink模型生成c语言代码。
通过学习发现我们可以单独的将几个模块放在一起,中间不做任何连接,也可以运行生成代码,这样在模型用simulink很难搭建情况下,我们可以省去编程里复杂的初始化,应用此系统进行初始化,之后再进行算法编程。
在学习过程中的问题:(1)在对configuration parameter里的solver设置时,为何要用固定步长和离散的,起初以为是采样的原因,之后发现没有ADC 转换时也为相同设置,其他均会出错。
实验1-4 matlab入门 、基于simulink的AM、DSB、SSB调制解调仿真

实验一MATLAB的使用及SIMULINK 的建模仿真一、实验目的1.熟悉Matlab的使用及SIMULINK 工作环境及特点2.掌握线性系统仿真常用基本模块的用法3.掌握SI MULI NK 的建模与仿真方法二、实验原理:1.SI MULI NK 简介Simulink 是M atlab 提供的用于对动态系统进行建模、仿真和分析的工具包。
Simulink 提供了专门用于显示输出信号的模块,可以在仿真过程中随时观察仿真结果。
同时,通过Simulink 的存储模块,仿真数据可以方便地以各种形式保存到工作区或文件中,供用户在仿真结束之后对数据进行分析和处理。
另外,Simulink 把具有特定功能的代码组织成模块的方式,并且这些模块可以组织成具有等级结构的子系统,因此具有内在的模块化设计要求。
基于上述优点,Simulink 成为一种通用的仿真建模工具,广泛应用于通信仿真、数字信号处理、模糊逻辑、神经网络.机械控制和虚拟现实等领域。
Simulink 它使用户把精力从编程转向模型的构造。
随着实验的不断深入,你们会发现它为用户省去了许多重复的代码编写工作,用户就不必一步一步地从最底层开始编写。
如果把动态系统建模仿真过程比作建造房子,那么用高级语言或M atlab 语言编写的仿真程序的方式就如同是从一堆沙子开始造房子。
这不但麻烦,而且有许多重复操作,建造者的精力会大量地浪费在一些相同地例如把沙子变成砖块的事情上,以及如何把它们组在一起变成房子这些技术性的事情.而不能把更多的精力集中用到房子的设计上,这在计算机仿真里,就等于是把精力厦多地投入到某一个具体的算法的设计上,而不是用到模型的设计构造本身,Simulink 的目的就是让用户能化更多的精力投入到模型设计本身。
它首先提供了一些基本模块,这些模块就放在上面的库浏览器里.用户可以调用这些模块,而不必再从最基本的做起。
Simulink 的每个模块对用户而言都是透明的,用户只需知道模块的输入输出以及模块的功能,而不必管模块内部是怎么实现。
实验四--基于simulink的2PSK、2DPSK数字调制与解调的仿真

3、锻炼学生分析问题和解决问题的能力
2、实验原理
1.12PSK调制原理
数字调相:如果两个频率相同的载波同时开始振荡,这两个频率同时达到正最大值,同时达到零值,同时达到负最大值,它们应处于"同相"状态;如果其中一个开始得迟了一点,就可能不相同了。如果一个达到正最大值时,另一个达到负最大值,则称为"反相"。一般把信号振荡一次(一周)作为360度。如果一个波比另一个波相差半个周期,我们说两个波的相位差180度,也就是反相。当传输数字信号时,"1"码控制发0度相位,"0"码控制发180度相位。载波的初始相位就有了移动,也就带上了信息。
模拟调相法原理方框图如下图所示,极性变器将输入的二进制单极性码转换成双极性不归零码,然后与载波直接相乘,以实现2PSK
模拟调相法
键控法原理方框图如下图所示,用数字基带信号s(t)控制开关电路,以选择不同相位的载波输出。此时s(t)通常是单极性的,当s(t)=0时,输出e2PSK(t)=cosωct;当s(t)=1时,输出e2PSK(t)=-cosωct。
码型变化器参数设置:采用1变0不变调制,故极性设为“Negative”.
多路选择器参数设置:当二进制序列大于0时,输出第一路信号;当二进制序列小于0时,输出第二路信号。
高斯噪声的设置:信噪比90
带通滤波器参数:载波频率为4HZ,而基带号带宽为1HZ,考滤到滤波器的边沿缓降,故设置为2~7HZ。
低通滤波器参数设置:截止频率为1HZ,二进制序列的带宽为1HZ,故取1HZ。
差分编码为 (2)
差分译码为 (3)
再将相对码 进行2PSK调制,则所得到的即是2DPSK已调信号,其在任一码元时间 内的表达式为