[补充]惯量张量 理论力学
惯性张量
基础张量
给定曲线坐标 x a (a = 1,2,...n) 有:
x = x(x , x , …x )
∂x dx = dx a ∂xa
1
2
n
∂x xa = a ∂x
直接取为坐标基矢,现设有连续可微的单 值函数
x a ' = x a ' x1 , x 2 ,...x n
(
)
(a = 1,2,....n )
∂x x a = a xa ' ∂x
a'
这两式非常重要,为张量的核心 通过以上的铺垫现在可以给出张量的定 量定义
基础张量
x a 中,在空间任一点M 定义 在曲线坐标
给出一组数:
T
β1 ... β m α1 ...α n
αn β1 ' βm '
如果当曲线坐标变换时,它变为
T
β1 '...β m ' α1 '...α n '
[A × (B × C )]
ijk
i
= ε ijk Aj (B × C )k
m n ijk m n
= ε Ajε mnk B C = ε ε mnk Aj B C
i j = δ mδ nj − δ niδ m Aj B mC n
= AnC B − Am B C = [( A ⋅ C )B] − [( A ⋅ B )C ]
r =r
= x +y +z
2 2
2
当
i = k 代入可得
I11 = ∫∫∫ ρ x 2 + y 2 + z 2 − x 2 dV = ∫∫∫ ρ x 2 + y 2 dV
31第7章第三十一讲 惯量张量分析与应用
第七章转动惯量与惯量张量1. 转动惯量的概念与基本公式2. 惯量张量3. 惯量主轴4. 定轴转动刚体轴承的附加动反力3. 惯量主轴3.1定义3.2确定惯量主轴的几何法3.3确定惯量主轴的代数法3. 惯量主轴3.1定义3.2确定惯量主轴的几何法3.3确定惯量主轴的代数法3.1 定义(1)惯量主轴惯性积可正可负,还可以为零。
如果同时有I=I yz=0,则把与xz两个惯性积同时相关的Oz轴称为刚体上对于O的惯量主轴。
(2)主转动惯量(主惯量)刚体对惯量主轴的转动惯量。
3.1 定义(3)中心惯量主轴通过质心的惯量主轴(4)中心主惯量对中心惯量主轴的转动惯量3.2 确定惯量主轴的几何法(1)有对称轴定理1:均质刚体有对称轴,则此轴必为刚体的中心惯量主轴。
证明设对称轴为z轴,z必须通过质心C。
过C作Cxyz,则刚体内任一点质量为mi 坐标(xiy i z i)必有一对应点,对应点坐标为(-x i-y iz i),由惯性积的定义知道I xz=I yz=0故z轴为惯性主轴。
3.2 确定惯量主轴的几何法定理2:中心惯量主轴必为该轴上任一点的惯量主轴。
3.2 确定惯量主轴的几何法(2)有对称面定理3:均质刚体如有对称面,则垂直于对称面的轴,必为刚体对其交点的惯量主轴。
I xz =I yz =0故z 轴为惯性主轴。
证明设z 轴为垂直于对称面之轴交对称面于O 点,Oxy 面与对称面重合,则任一质量为m i 点坐标(x i y i z i )必有一点(x i y i -z i )。
根据惯性积的定义3.2 确定惯量主轴的几何法(3)回转体定理4:均质回转体,其对称轴为z轴,则由z轴组成的任一直角坐标系Oxyz的各轴均为刚体对点O的惯量主轴。
证明取点O为z轴上任一点,作Oxyz。
则z轴为对点O的惯量主轴,又因过z轴的所有平面均为刚体的对称面,故由定理3可知,轴x、y也必为刚体对点的惯性主轴【例】已知均质薄板M 、a 求:惯量主轴及相应主惯量解:因板面是对称面,故z 轴为惯量主轴,又因x 轴为对称轴,则x 轴为惯量主轴,故y 轴也为惯量主轴。
工业设计概论 惯量张量
工业设计概论1. 惯量张量1.1 什么是惯量张量惯量张量是描述物体惯性特性的物理量,也被称为转动惯量或质量分布特征。
它可以用来描述物体在旋转运动中的稳定性和惯性。
惯量张量能够反映物体在不同方向上转动的惯性大小,它的大小和方向对于物体在空间中的旋转运动具有重要影响。
1.2 惯量张量的计算方法惯量张量通常通过物体的质量和几何结构来计算。
对于均匀物体,可以使用基础几何形状的惯量公式进行计算,然后通过平移和旋转的变换来得到物体特定方向上的惯量张量。
对于复杂的物体,可以使用积分的方法进行计算,将物体分解成许多微小的质量元,然后对每一个质量元进行惯量计算,并将所有质量元的贡献相加得到最终的惯量张量。
1.3 惯量张量的应用惯量张量在工业设计中有着广泛的应用。
在机械设计中,惯量张量可以用来评估机械结构的稳定性和动力学特性。
通过对机械系统不同方向上的惯量张量进行分析,可以确定其旋转的灵活性和稳定性,从而优化设计方案。
在汽车设计中,惯量张量可以用来评估汽车的操控性能和稳定性。
合理地分配汽车各个部位的质量,可以使汽车的惯量张量尽可能接近均匀分布,从而提高操控的稳定性。
2. 惯量张量的重要性2.1 惯量张量与物体运动稳定性的关系惯量张量可以用来评估物体在旋转运动中的稳定性。
一个物体的稳定性取决于其惯量张量的大小和方向。
当一个物体的惯量张量在不同方向上的分量相等时,它会更加稳定,旋转起来更加平稳。
相反,当一个物体的惯量张量在某些方向上明显大于其他方向时,它会出现不稳定的旋转,甚至会发生翻滚或倾斜现象。
2.2 惯量张量与设计优化的关系在工业设计中,合理地设计和分配物体的质量可以优化其惯量张量,从而改善物体的稳定性和性能。
通过调整物体的几何结构和质量分布,可以使惯量张量尽可能接近均匀分布,从而减小不稳定旋转的发生。
在机械设计中,通过优化物体的结构和材料选择可以改变惯量张量的大小和方向,从而提高机械系统的动力学性能和稳定性。
2.3 惯量张量在工业设计中的实际应用在工业设计中,惯量张量可以应用于各种领域。
高等数学1 惯量张量

高等数学1 惯量张量惯量张量(moment of inertia tensor)也被称为惯性张量或转动惯量张量,是描述刚体对转动的惯性特性的重要工具。
在高等数学中,学习惯量张量是研究刚体平衡和旋转动力学的基础。
本文将讨论惯量张量的定义、性质和应用。
1.定义:惯量张量是一个二阶张量,它既包含了刚体对于轴线转动的惯性分布信息,也体现了角动量和角速度之间的关系。
假设一个刚体绕坐标原点的轴线转动,那么惯量张量是由转动惯量乘以坐标轴的归一化因子构成的对称矩阵。
2.惯量张量的性质:(1)对称性:惯量张量是对称矩阵,这意味着任意两个轴之间的转动惯量是相等的。
对称性也意味着惯量张量的特征向量是垂直的,与对应的特征值相对应。
(2)变换性质:惯量张量在不同坐标系之间具有变换性质。
如果我们从某个坐标系切换到另一个坐标系,惯量张量的分量会按照坐标变换的规则进行变换。
(3)刚体的主轴:刚体的主轴是指与惯量张量的特征向量对应的轴线。
在主轴上,刚体的转动惯量最大;而在垂直于主轴的方向上,转动惯量最小。
刚体的主轴对于刻画刚体的稳定性和转动特性非常重要。
3.应用:(1)平衡和稳定性:惯量张量在平衡和稳定性问题中具有重要作用。
通过计算刚体的主轴和对应的转动惯量,我们可以判断刚体在不同轴线上的稳定性和平衡性。
(2)刚体的旋转运动:惯量张量也用于计算刚体的角动量和角速度之间的关系。
角动量是刚体在某一轴线上的转动惯量乘以角速度。
通过计算刚体的惯量张量,我们可以确定刚体的旋转周期、能量以及角速度的大小和方向。
(3)弹性力学:在弹性力学中,惯量张量的概念也被广泛应用。
它可以描述材料在应力作用下的抗扭性能,通过计算惯量张量的特征值和特征向量,可以得到材料的旋转刚度和扭转参数。
综上所述,惯量张量在高等数学中是研究刚体平衡和旋转动力学的重要工具。
它通过对刚体的转动惯量进行描述,帮助我们理解刚体的平衡性、稳定性以及角动量和角速度之间的关系。
同时,惯量张量也在弹性力学中发挥着重要的作用。
转动惯量详细资料大全
转动惯量详细资料大全转动惯量(Moment of Inertia)是刚体绕轴转动时惯性(回转物体保持其匀速圆周运动或静止的特性)的量度,用字母I或J表示。
在经典力学中,转动惯量(又称质量惯性矩,简称惯距)通常以I或J表示,SI 单位为kg·m2。
对于一个质点,I = mr2,其中 m 是其质量,r 是质点和转轴的垂直距离。
转动惯量在旋转动力学中的角色相当于线性动力学中的质量,可形式地理解为一个物体对于旋转运动的惯性,用于建立角动量、角速度、力矩和角加速度等数个量之间的关系。
基本介绍•中文名:转动惯量•外文名:Moment of Inertia•表达式:I=mr2•套用学科:物理学•适用领域范围:刚体动力学•适用领域范围:土木工程基本含义,质量转动惯量,面积转动惯量,相关定理,平行轴定理,垂直轴定理,动力学公式,张量定义,实验测定,实验原理,实验内容,计算公式,对于细杆,对于圆柱体,对于细圆环,对于薄圆盘,对于空心圆柱,对于球壳,对于实心球体,对于立方体,对于长方体,基本含义质量转动惯量其量值取决于物体的形状、质量分布及转轴的位置。
刚体的转动惯量有着重要的物理意义,在科学实验、工程技术、航天、电力、机械、仪表等工业领域也是一个重要参量。
电磁系仪表的指示系统,因线圈的转动惯量不同,可分别用于测量微小电流(检流计)或电量(冲击电流计)。
在发动机叶片、飞轮、陀螺以及人造卫星的外形设计上,精确地测定转动惯量,都是十分必要的。
转动惯量只决定于刚体的形状、质量分布和转轴的位置,而同刚体绕轴的转动状态(如角速度的大小)无关。
形状规则的匀质刚体,其转动惯量可直接用公式计算得到。
而对于不规则刚体或非均质刚体的转动惯量,一般通过实验的 ... 来进行测定,因而实验 ... 就显得十分重要。
转动惯量套用于刚体各种运动的动力学计算中。
转动惯量的表达式为若刚体的质量是连续分布的,则转动惯量的计算公式可写成(式中表示刚体的某个质元的质量,r表示该质元到转轴的垂直距离,ρ表示该处的密度,求和号(或积分号)遍及整个刚体。
02-课件:5-2 转动惯量及惯性张量
ZZ
惯性矩、惯性积
□绕轴X、y和Z的质量惯性矩分别为
心=( y2 + z z)pdx = (y2 + z 2)dm
Iyy = J" (Z 2 + X 2 )Pd =肚(Z 2 + "枷
I
J=
3
+
y2
)pdv
=
JJJ m
(x2
+
y2
枫Q混m合矩(称为惯性积):
I xy
=
JJJvxy
Pdv
=
JJJm xydm
W\ Lz =
vyzPdv =
JJJm yzdmI zx=Fra bibliotekJJJ
zxpdv
=
JJJ zxdm
惯性张量和惯性矩阵 惯性张量与坐标系的原点和方位的选择有关。坐标轴平移或旋转
£ 后,惯性张量和惯性矩阵的各个元素会发生变化。设坐标系 C
I
£ 的原点设在刚体的质心,坐标系 刀的各轴与£ C —<•・
平行,根据平行轴理论,刚体相对于两坐标系的惯性矩和惯性
转动惯量及惯性张量
转动惯量的概念 物体质量为m ,半径为 r , F为切向力,N为扭矩
F = md dt
牛顿第二定律
(不考虑重力影响)。
B
门 、 。 dv d /
d
。 —— 虫 N
F
=
=
Fr
m——)=m=
mr
——
dt
r dt dt
N = Fr = mr2 =
迎 dt dt
转动惯量的概念
I = mr N 二=dIt
惯性张量
相对于给定的坐标系& ,可以用以上6个量组成一个矩阵勺 来表 示物体的质量分布特征,称为惯性张量。它可以被看成是对 — 个物体惯量的广义度量,和选取的坐标系有关。如果我们选取 坐标系的方位,使得各惯性积为零,则相对于这一坐标系,惯性 张 量是对角型。而此坐标系的各轴叫惯性主轴,相应的惯性矩叫 主惯性矩。
机械原理 惯量张量
机械原理惯量张量机械原理机械原理是研究机械运动和力学性质的一门学科,主要包括静力学、动力学、弹性力学、流体力学等方面。
它是研究物体在运动和静止状态下所受到的各种外力作用及其相互作用关系的科学。
惯量张量惯量张量是描述物体惯性特性的一个重要参数。
在三维空间中,一个刚体的惯量可以由一个3x3的矩阵来表示,这个矩阵就是惯量张量。
一、刚体的惯性刚体在不受外界作用时,保持静止或匀速直线运动。
当刚体发生转动时,需要施加一定大小和方向的扭矩才能改变其转动状态。
这种现象表明刚体具有惯性。
二、质心与角动量刚体在运动过程中,其质心总是沿着一条直线运动。
当刚体绕着某个轴旋转时,我们可以通过计算角动量来描述其旋转状态。
角动量L等于物体质点p在与轴垂直方向上距离r处的线性速度v与质点p到旋转轴的距离r的乘积。
三、惯量张量的定义惯量张量是描述刚体惯性特性的一个重要参数。
在三维空间中,一个刚体的惯量可以由一个3x3的矩阵来表示,这个矩阵就是惯量张量。
对于一个刚体而言,其惯量张量I可以表示为:I = [Ixx Ixy Ixz][Iyx Iyy Iyz][Izx Izy Izz]其中,Ixx、Iyy和Izz分别表示围绕x、y和z轴旋转时的转动惯量;Ixy、Ixz和Iyz则表示不同轴之间的耦合效应。
四、计算方法1.对于一个简单几何形状的物体,如球体或长方体等,可以通过公式直接计算出其惯量张量。
2.对于复杂形状的物体,则需要使用积分来计算其惯量张量。
具体来说,我们可以将物体分成无数个小块,并计算每个小块对于各个轴上转动惯量的贡献。
五、应用1.机器人运动控制在机器人运动控制中,需要精确地了解机器人各部分质心位置和转动惯量。
这样才能够设计出合适的控制算法,使机器人能够快速、准确地完成各种任务。
2.飞行器设计在飞行器设计中,需要精确地了解飞行器各部分质心位置和转动惯量。
这样才能够设计出合适的控制算法,使飞行器能够稳定、安全地飞行。
3.物理学研究惯量张量是描述刚体惯性特性的一个重要参数,在物理学研究中有着广泛的应用。
惯性张量
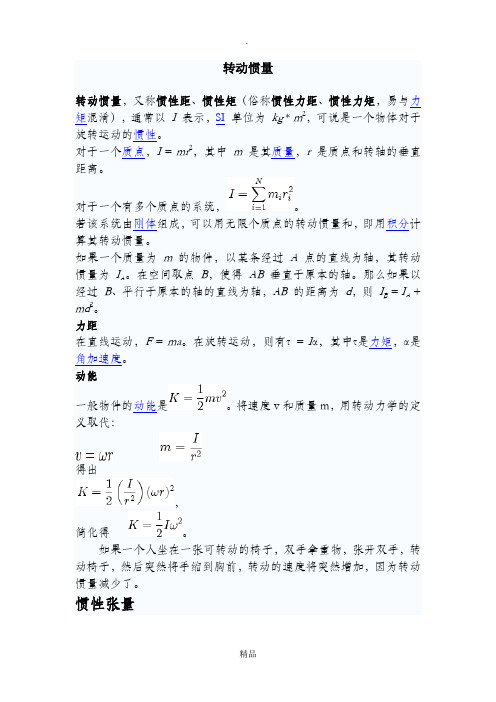
转动惯量转动惯量,又称惯性距、惯性矩(俗称惯性力距、惯性力矩,易与力矩混淆),通常以I表示,SI单位为kg * m2,可说是一个物体对于旋转运动的惯性。
对于一个质点,I = mr2,其中m是其质量,r是质点和转轴的垂直距离。
对于一个有多个质点的系统,。
若该系统由刚体组成,可以用无限个质点的转动惯量和,即用积分计算其转动惯量。
如果一个质量为m的物件,以某条经过A点的直线为轴,其转动惯量为I A。
在空间取点B,使得AB垂直于原本的轴。
那么如果以经过B、平行于原本的轴的直线为轴,AB的距离为d,则I B = I A + md2。
力距在直线运动,F = ma。
在旋转运动,则有τ= Iα,其中τ是力矩,α是角加速度。
动能一般物件的动能是。
将速度v和质量m,用转动力学的定义取代:得出,简化得。
如果一个人坐在一张可转动的椅子,双手拿重物,张开双手,转动椅子,然后突然将手缩到胸前,转动的速度将突然增加,因为转动惯量减少了。
惯性张量对于三维空间中任意一参考点Q 与以此参考点为原点的直角座标系Qxyz ,一个刚体的惯性张量是。
(1)这里,对角元素、、分别为对于x-轴、y-轴、z-轴的惯性矩。
设定为微小质量对于点Q 的相对位置。
则这些惯性矩,可以精简地用方程式定义为,,(2)。
而非对角元素,称为惯性积, 可以定义为,,(3)。
导引图A如图 A ,一个刚体对于质心G 与以点G 为原点的直角座标系Gxyz 的角动量定义为。
这里,代表微小质量在Gxyz 座标系的位置,代表微小质量的速度。
因为速度是角速度叉积位置,所以,。
计算x-轴分量,相似地计算y-轴与z-轴分量,角动量为,,。
如果,我们用方程式(1) 设定对于质心G 的惯性张量,让角速度为,那么,。
(4)平行轴定理平行轴定理能够很简易的,从对于一个以质心为原点的座标系统的惯性张量,转换至另外一个平行的座标系统。
假若已知刚体对于质心G 的惯性张量,而质心G 的位置是,则刚体对于原点O 的惯性张量,依照平行轴定理,可以表述为,,(5),,,(6)。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
张量方程在任何坐标系中同性 既 Li k Iik 如果在笛卡儿坐标系中成立 则 Li k Iik 在任何坐标系中都成立 这样惯性张量在非欧空间(宇宙)中同样适用
在笛卡儿坐标下验证结果
在笛卡儿坐标下: i i r r i i
r r
x y z
2 2
2
T
1 '... m ' '... n '
则称这一组数为在M点的一个n阶协变、m阶 逆变的张量
度规张量
张量的度规
2
, 都为求和指标 共为9项
ds g dx dx e e dx dx
同理
ds g dx dx g dx dx g dx dx
ijk
ijk
{
符号的基本性质
ijk
i k
ijk
符号的基本性质
k i m j n j m i n
i i k ijk
mnk
A B ijk Ai B j ek
求和约定
求和约定
A B
i 1 n
3
张量的优越性
在浩瀚的宇宙中,空间再也不是欧式空 间,因而许多定理方法在弯曲的时空下 无能为力 在由欧式空间转化为非欧空间过程中, 张量的性质保持不变,张量的优越显露 无疑 在研究非欧空间物体的转动惯量时,惯 量张量可以原分不动地直接使用
附言
参考书目
杨维纮 《力学》 中国科学技术大学 吕盘明 《张量算法简明教程 》 中国科 学技术大学 论文中的教材指杨维纮教授的《力学》
得: L
r r dV
A
r r r r dV
A
证明
现用张量的方法 i 把 L 在 x 上分解
得:
L r rm r rk d V
i i m i k A
又
i i k
k
证明
x xa a xa ' x
a'
这两式非常重要,为张量的核心 通过以上的铺垫现在可以给出张量的定 量定义
基础张量
a x 定义 在曲线坐标 中,在空间任一点M
给出一组数:
T
1 ... m 1 ... n
n 1 ' m '
如果当曲线坐标变换时,它变为
1 ... m x x x x 1 ' ... n ' 1 ... m T 1 ... n x x x x 1
I12 I 21 xydV I13 I 31 xzdV
A
I 23 I 32 yzdV
A
结论
与教材上惯性张量在笛卡儿坐标的分量相 同 i k i 可得出 L Ik 在任何坐标系下都成 立 既在非欧空间(宇宙)中成立 显示了张量方程的优越性 给出了在解决非欧空间中转动惯量问题时 可以使用惯量张量方法的原因
当
i k 代入可得
I11 x y z x dV x y d V
2 2 2 2 2 2 A A
在笛卡儿坐标下验证结果
同理可得:
I 22 x z d V
2 2 A
I 33 x y d V
2 2 A A
它的反函数:
x a x a x1' , x 2' ,...x n'
a 1,2,....n
x xa ' a ' x
也是连续可微的单值函数,得:
x x x , x ,...x
1' 2'
n'
基础张量
得下面曲线坐标局部标架基矢之间的变 换法则
x a xa ' a ' xa x
2
g , g , g , g
都是二阶度规张量
张量的商法则
若已知: L 为张量 M 为任意张量 且存在 M T L
可得
T
也为一张量
关于A×B×C的证明
用张量的方法证明
A B C
ijk
i
ijk A j B C k
m n ijk m n
n
n为哑指标可被换为任何字母 此为爱因斯坦的贡献
An B Am B
n
m
基础张量
张量的定性定义 一个向量是由直角坐标系中的三个分量 所确定的而三个分量都是数量 由此可见向量是由三个数量所确定的. 在现实世界中,有的物理量需要大于三 个的数量才能确定 从而提出张量的概念. 张量有零阶张量 (表量),一阶张量(矢量),二阶张 量等等
一物体A 对O点的动量矩为
z
A
L r vdV
dV 为微元体积
A
(1)
v 为速度
A 为物体
r
为任一点的失径( M 点)
r
y
M
为密度函数 为角速度
x
证明
z
r v
为一个矢量
A
L 矢量dV
A
矢量
r
M
A为一刚体 可得
v r
(2) x
证明
由(1)(2)式可
基础张量
给定曲线坐标 x a (a = 1,2,...n) 有:
x = x(x , x ,…x )
x dx dxa xa
1
2
n
x xa a x
直接取为坐标基矢,现设有连续可微的单 值函数
x a' x a' x1 , x 2 ,...x n
a 1,2,....n
基础张量
证明
为任意矢量 L 为一矢量
根据张量的商法则
r
A
i m k m
r r rk d V
i
定为张量且为二阶张量 定义
I r rm r rk dV
i k i k m i A
结论
则 Iik为二阶张量
L I
i k
i 为张量方程 k
惯量张量的推广
A j mnk B C mnk A j B C
i m nj ni mj A j B mC n
AnC B Am B C A C B A B C
n i m n i
j
选择并点击文字
看懂以上内容
还需要再看一次
证明
惯量张量推导与推广
附:张量基础
点击文字选择观看
已经了解张量初步知识
不知道何为张量
一些符号与约定
i 关于 k
ijk
ijk
符号
符号
i k
定义为 符号
i k
{
0 1
ik ik
ijk
ijk
定义为
1 ijk为顺序既 123 , 231 , 312 1 ijk为倒序既321 , 213 , 132 0 ijk为其它情况既ijk中有两个一样
代入得
L r r r rk d V
i k i m k m i k A
r r r rk d V
k i m k m i A
证明
分析此式
i
k
L r r r rk d V
i m k m i A
在刚体中 A中任意一点的角速度 都相同 既 可为任意矢量