基于ST89C52单片机的自动往返小车(含程序)
基于单片机的自动往返小车毕业设计

基于单片机的自动往返小车毕业设计基于单片机的自动往返小车摘要:本设计以一片单片机STC89C52作为核心来控制自动往返小车,其中控制芯片L298N和单片机联合控制小车的前进与后退。
路面的黑带检测使用反射式红外传感器,并通过STC89C52对输入的信号进行处理;行驶距离使用霍尔元件进行检测。
最后以动态显示的形式通过一个LCD液晶显示即时黑带个数,运行时间,实时路程等。
关键词:微控制器 L298N电机控制霍尔检测液晶显示The Automatic round-trip car based on SCMAbstract:This design use a microcontroller STC89C52 as the core to control the automatic round-trip car, the control chip L298N and single chip microcomputer to control the car forward and backward together. The reflective infrared sensor detection the black belt on the road surface, then deal with input signal processing through the STC89C52. Using the hall element to test the distance. At last displaying instant black belt, running time, real-time distance, etc through a number of LCD liquid crystal in the form of dynamic displayKeywords:MCU L298N Motor control Hall detection LED display目录摘要 (I)关键字 (I)Abstract (I)Keywords (I)0绪论 (2)1.1 设计任务 (3)1.2方案介绍 (4)2.1 系统元器件的选择与介绍 (5)2.1.1 STC89C52R芯片 (5)2.1.2 L298N芯片 (11)2.1.3霍耳传感器(HD3020) (14)2.1.4液晶LCD (15)2.2电路模块的设计 (18)2.2.1检测系统 (18)2.2.2距离计算系统 (19)2.2.3显示系统 (20)2.2.4电机驱动以及正反转控制模块 (20)3.1主程序 (21)3.2中断程序 (22)3.2.1外部中断0 (22)3.2.2外部中断1 (23)3.2.3定时器中断0 (24)3.2.4定时器中断1 (24)4总结 (21)致谢 (21)参考文献 (21)附录 (21)0绪论当今社会,随着科技发展的日新月异,特别是计算机技术突飞猛进的发展,计算机技术带来了科研和生产的许多重大飞跃,同时计算机也越来越广泛的被应用到人们的生活、工作领域的各个方面。
基于STC89C52单片机智能小车设计

基于STC89C52单片机智能小车设计一、本文概述随着科技的飞速发展,智能化、自动化已经成为现代社会发展的重要趋势。
在这一背景下,智能小车作为一种集成了控制、传感器、通信等多种技术的智能移动平台,受到了广泛的关注和研究。
本文将以STC89C52单片机为核心,探讨智能小车的设计方案,包括硬件电路的设计、控制算法的实现以及实际应用的展望。
STC89C52单片机作为一款常用的8位微控制器,具有高性价比、稳定可靠、易于编程等优点,在智能小车的设计中发挥着关键的作用。
通过合理的硬件电路设计,可以实现小车的运动控制、传感器数据采集、无线通信等功能。
同时,结合相应的控制算法,可以使小车具备自主导航、避障、路径规划等智能行为。
本文将从硬件和软件两个方面详细介绍智能小车的设计过程。
硬件方面,将重点介绍STC89C52单片机的选型、外围电路的设计以及传感器的选型与连接。
软件方面,将详细介绍小车的控制算法,包括运动控制算法、传感器数据处理算法以及无线通信协议的实现。
本文还将对智能小车的实际应用进行展望,探讨其在智能家居、工业自动化、教育娱乐等领域的应用前景。
通过本文的阐述,旨在为读者提供一个基于STC89C52单片机的智能小车设计思路和方法,为其后续的研究和开发提供参考和借鉴。
二、智能小车硬件设计智能小车的硬件设计是整个项目的基础,其设计的好坏直接影响到小车的性能和稳定性。
在本设计中,我们选择了STC89C52单片机作为小车的核心控制器,它是一款高性能、低功耗的8位CMOS微控制器,具有强大的数据处理能力和丰富的外设接口,非常适合用于智能小车的控制。
电源模块:为了提供稳定的工作电压,我们选择了LM7805三端稳压芯片来构建小车的电源模块,该芯片可以将输入的不稳定电压稳定输出为5V,为单片机和其他模块提供稳定的电源。
电机驱动模块:小车的运动需要靠电机来驱动,我们选择了两款直流电机,通过电机驱动板(如L298N)来控制电机的正反转和转速,从而控制小车的行驶方向和速度。
单片机89c52自动往返电动小汽车(电路+程序)

摘要本设计是自动往返电动小汽车,采用AT89S51单片机来控制小汽车的前进、后退和限速,该芯片通过数码管还可以显示往返的时间和经过黑线的次数,也可以显示行驶的路程,利用传感器来检测是否到达限速区,在用单片机的pwm来调速,该设计不需要无线和有线遥控的控制,全部通过软件控制,自动往返小汽车是未来发展的趋势,环保又安全,满足社会的发展。
关键字:AT89S51;PWM;软件控制;传感器ABSTRACTThis design is:Automatically go back and forth a dynamoelectric small autocar, the adoption AT89 S51 unipole slab machine to control precession, countermarch and limit of small autocar soon, the chip approval figures tube can also display to go back and forth of the number of times in time and process black wire . May also demonstrate that the travel the distance, using the sensor examines whether to arrive at the regulating area, is using monolithic integrated circuit's pwm to modulate velocity, this design does not need wireless and the wired remote control control, through the software control, travels between the compact car is automatically completely the tendency which the future will develop, the environmental protection is also safe, satisfies social the development.Key Words:AT89S51;PWM;The software controls;Spread a feeling machine目录1系统方案的选择与论证 (7)1.1单片机的选择: (7)1.2显示器选择: (7)1.3电机制动 (7)1.4地面黑线检测模块 (8)2系统原理框图 (9)2.1显示模块 (9)2.2电机调速 (10)2.3电机驱动 (10)2.4跑道标志检测 (10)3软件流程 (11)3.1主程序流程 (11)3.2计时子程序流 (12)3.3路程速度检测子程序 (13)4总结 (14)5元件清单 (15)6参考文献 (16)附录一 (17)自动往返电动小汽车一、任务设计并制作一个能自动往返于起跑线与终点线间的小汽车。
基于STC89C52单片机的智能寻迹小车的设计与实现

基于STC89C52单片机的智能寻迹小车的设计与实现摘要:随着汽车科学技术的进步,对于智能小车的实验与设计越发重要.智能小车一致具有自动寻迹、躲避障碍物、报警等功能.其所运用的知识较为广泛,主要涉及到汽车、机械和计算机等专业.智能小车不但代表汽车技术的发展,也是学校培养机电一体化学和动手能力的主要手段。
本文所设计的小车采用STC89C52芯片作为主控制芯片,通过实时检测各个模块传感器的输入信号,利用3路红外传感器寻迹模块检测黑线实现寻迹,小车电机驱动采用L298N芯片,根据内置的程序分别控制小车左右两个直流电机运转,实现小车自动识别路线,到达终点时小车自动停止蜂鸣器发出警报。
另外,在小车上添加测速模块,利用单片机内部定时器、外部中断以及串口通信,测出小车行驶的总路程,数据通过蓝牙传感器以十六进制数的形式在手机上显示出来。
并在此基础上增添超声波模块,利用超声波的发射与接收,采用单片机IO口查询相应信号,判断小车与障碍物的距离,在距障碍物15cm左右的距离时,通过程序控制小车实现自动避障,且在绕过障碍物后回归原始路径。
关键词:单片机控制;直流电机;红外线传感器;测速模块;避障模块;本智能寻迹小车的硬件部分主要由STC89C51为主控芯片,主要包括电源模块、电机驱动模块、寻迹模块、超声波模块测距模块等,其中控制系统的大概结构如图1所示。
电机方面,本小车采用直流电机。
它的优点在于硬件电路设计简单。
当外加额定直流电压时,由于其内部由高速电机提供原始动力,带动变速齿轮组,可以产生大扭力,能够很好地控制。
转速几乎相等,调速性能较好,且性价比高。
并采用L298N驱动集成电路。
当驱动电机时,单片机可以控制与两路电机相连的IO口的逻辑电平,以达到控制小车车轮转向的目的寻迹方面,本车采用3路红外传感器寻迹模块。
外传感器寻迹模块由红外发射管和接受管组成,三个光电三极管分别放置在小车车头的左侧、右侧和正前方,红外发射管发出红外线,当发出的红外线照射到白色的平面后反射,接收管接收到反射光,经施密特触发器整形后输出低电平;当红外光遇到黑线时则被吸收,接收管没有接收到反射光,经施密特触发器整形后输出高电平。
基于 STC89C52 单片机的智能小车设计
能智造与信息技术基于STC89C52单片机的智能小车设计李亚振(安阳师范学院河南安阳455000)摘要:本设计主要器件有STC89C52单片机、RZ7899驱动芯片和N20直流减速电机,使用两节锂电池共7.4V 作为系统供电,经LM7805稳压芯片降压到5V 后为单片机系统供电,通过红外循迹模块和避障模块,实现S 形曲线行驶和避障功能。
通过控制电机驱动模块控制电机输出转速,改变车辆移动状态,实现转弯。
在行驶过程中,通过蜂鸣器播放音乐或充当汽车喇叭,同时设置灯光进行照明。
软件程序采用C 语言,通过keil 软件实现对小车的控制。
通过pcb 设计和实物调试,验证了该智能小车虽设计简单,但功能强大,应用广泛。
关键词:智能小车STC89C52单片机循迹PCB 设计中图分类号:TP23文献标识码:A文章编号:1674-098X(2022)04(a)-0058-04当前,社会新工艺、新技术快速发展,人工智能技术逐步成熟,并广泛应用于工业、农业、医疗等行业。
智能小车作为人工智能领域研究的重要分支,可以代替人类在一些危险环境下完成相关工作。
本设计以STC89C52单片机作为小车控制系统的核心处理器,包括驱动、红外循迹、避障和音乐播放等模块,通过对各模块的设计,全面说明该智能小车工作的基本原理。
1系统总体设计目标本设计增添红外线遥控电路,控制智能小车运动,功能除了前进后退,还可以按照设置路线行驶并躲避障碍物,利用C 语言程序设置智能小车的运动状态,在编写代码时写入不同的音乐模块,调试实现小车的多功能运行[1]。
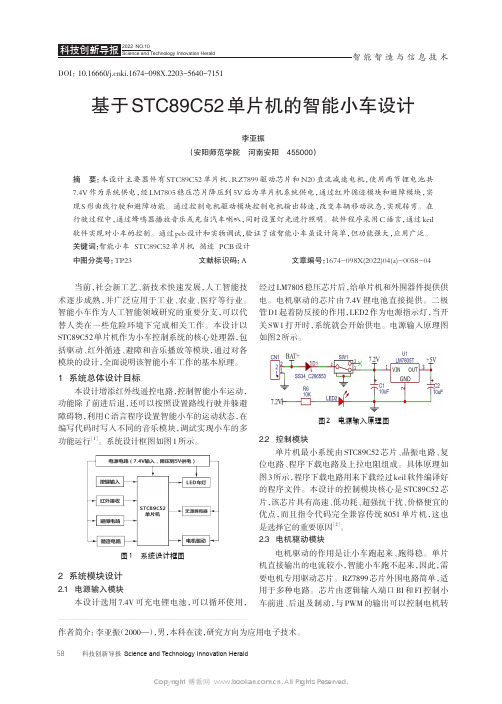
系统设计框图如图1所示。
2系统模块设计2.1电源输入模块本设计选用7.4V 可充电锂电池,可以循环使用,经过LM7805稳压芯片后,给单片机和外围器件提供供电。
电机驱动的芯片由7.4V 锂电池直接提供。
二极管D1起着防反接的作用,LED2作为电源指示灯,当开关SW1打开时,系统就会开始供电。
电源输入原理图如图2所示。
基于单片机STC89C52的多功能智能小车设计

毕业设计(论文)题目基于单片机STC89C52的多功能智能小车设计学院机电工程学院专业班级机电092 班学生姓名指导老师成绩2013年 6 月 15 日摘要本文介绍了一种利用AT89S52单片机为控制核心,结合多种传感器以及PID算法实现无线控制、循迹、寻光和自动跟踪的智能小车。
智能小车通过无线遥控实现前进后退和转向行驶。
利用反射式光电传感器检测黑线实现小车循迹,利用超声波传感器检测道路上移动的目标,控制电动小汽车的自动跟踪它,整个系统具有自动寻迹、寻光和速度测试功能。
其中,控制部分采用STC89C52 STC89C52是一款8位单片机,它的易用性和多功能性受到了广大使用者的好评。
电机驱动采用常用的PWM方式进行电机的调速控制,小车的速度通过液晶屏来显示。
整个系统的电路结构较简单,可靠性能高,能满足各种设计的要求。
随着我国高科技水平的不断提高和工业自动化进程的不断推进,智能小车被广泛应用于各种玩具和其他产品的设计中,极大地丰富了人们的生活。
关键词: 单片机;PWM调速;循迹跟踪;寻光AbstractThis paper introduced an kind of intelligent car that use AT89S52 SCM as control core , combine with multiple sensors and PID control algorithm to achieve the function that wireless control ,find track,search light and follow-up tracing .the electrical caruse wireless control to make car go forward, go backward or turn around. the electrical car uses reflective photoelectric sensor to detect black line to achieve track-finding, uses ultrasonic sensors to detect moving target on the road to following it automatically.The entire system has the function that trace route automatically,find light and test speed .Among them, STC89S52 which has 8-bit single-chip is used as the control part.Because of useing easily and having multi-function ,it suffers large users. The motor driver uses the common way--PWM for the motor controlling speed. the speed of car is displayed by the LCD screen .The circuit structure of the whole system is relatively simple, high reliability, and it can meet the requirements of the various design.With the continuous improvement of high technology and the stead process in industrial automation in our country,the Intelligence-car which gradually access to people's attention has been widely applied to design a variety of toys and other products,which greatly enriched people's lives.KEY WORDS: SCM;PWM speed adjusting; Track finding and follow-up tracing; Find light目录摘要 (I)ABSTRACT (II)第1章绪论 (1)1.1选题的背景与意义 (1)1.1.1 国外智能车辆的现状研究 (1)1.1.2 国内智能车辆的现状研究 (1)1.1.3 选题意义 (2)1.2本设计的内容及意义 (2)1.2.1 设计的内容 (2)1.2.2 本设计的意义 (3)1.3主要难点和解决的方法 (3)1.4研究方法、手段及步骤 (3)第2章方案设计与论证 (5)2.1创新点 (5)2.2总体体设计方案 (5)2.3小车的方案设计与论证 (6)2.4驱动电机模块的选定 (6)2.5寻迹传感器模块的选定 (7)2.6光源传感器模块的选定 (7)2.7电源模块的选定 (7)2.8跟踪模块选定 (8)2.9控制方式选定 (8)2.10最终方案 (9)第3章机械系统的设计 (10)3.1小车车体 (10)3.2减速电机 (10)3.2.1 减速电机安装 (10)3.2.2 减速电机的安装校核 (12)3.2万向轮 (14)3.2.1 万向轮组装 (14)3.2.2 万向轮轮轴的安装校核 (15)3.3模块组装 (16)3.3.1循迹模块组装 (16)3.3.2 寻光模块的组装 (17)3.3.3 超声波距离传感的固定 (17)3.3.4 电源的放置 (18)3.3.5 主板模块的安装 (18)3.4小车整体组装图 (19)第4章硬件设计 (22)4.1系统工作原理及功能简介 (22)4.2单片机控制电路 (22)4.3电机驱动电路 (24)4.3.1 驱动电路 (24)4.3.2 PWM调速原理 (26)4.4循迹检测电路 (26)4.5稳压电路 (28)4.5.1稳压芯片简介 (28)4.5.2系统供电单元介绍 (28)4.6光源检测电路 (29)4.7自动跟踪 (30)4.7.1 超声波传感器检测电路 (30)4.7.2.超声波测距原理 (31)4.8液晶显示电路 (32)4.9智能小车整体设计 (33)第5章智能小车软件部分 (36)5.1软件调试平台 (36)5.2系统软件流程 (37)5.3系统软件各模块程序 (38)5.3.1 主程序 (38)5.3.2 宏定义 (39)5.3.3 红外接收 (40)5.3.4蓝牙接收 (41)5.3.5 循迹 (42)5.3.6 自动跟踪 (43)5.3.7 寻光 (45)5.4手机上位机 (48)5.4.1 概述 (48)5.4.2 功能 (48)5.4.3 实现界面 (49)5.4.4 程序流程图 (49)第6章调试 (51)6.1调试方法 (51)6.2测试结果与分析 (51)参考文献 (53)致谢 (55)第1章绪论1.1选题的背景与意义智能化作为现代社会发展的趋势,是以后的发展方向,他可以按照自己设定的模式在一个设定环境里自动的运行,不需要人为管理,便可以完成设想所要达到的目的。
基于STC89C52单片机的智能循迹小车设计
1智能循 迹小 车 总体 硬 件结构 设计 及工 作原 理简 介
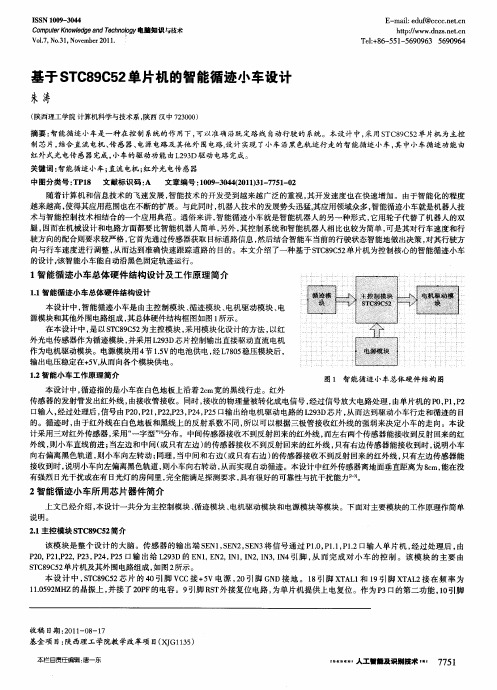
11 . 智能循迹小车总体硬件结构设计 本设计 中 , 能循迹小车是 由主控 制模块 、 迹模块 、 智 循 电机驱动模块 、 电 源模块和其他外围电路组成 , 其总体硬件结构框图如图 1 所示 。 。
在本设计 中, 以 S C 9 5 为主控模块 , 是 T 8C 2 采用模块化 设计的方法 , 以红 外光 电传感器作为循迹模块 , 并采用 L 9 D芯 片控制输 出直接驱动直流 电机 23 作为 电机驱动模块。电源模块用 4 1 v的电池供电 , L 85 节 . 5 经 7 0 稳压模块后 , 输 出电压稳定在+ V从而向各个模块供 电。 5,
h t :w t / ww.n sn t n p/ d z .e . c T l 8 — 5 — 6 0 6 5 9 9 4 e g n ehooy电 脑 知 识 与技术 o p t K o l ea dTc nlg e d
采mstc89c52单片机为主控制芯片结合直流电机传盛器电潭电路噩其他外围电肆i乏计实观7小车沿黑色轨进行走曲智能错进小车其中一p丰循进才能由红外式光电传感嚣完成小车的驱动功能由l293d驱动电路完成
I S l O —3 4 S N O 9 0 4
E ma l e u @C C .e .B — i: d f C Cn t C
1 . 2智能小车工作原理简介 本设计 中, 循迹指的是小车在 白色地板上沿着 2m宽 的黑线行走 。红外 c 图 1 智能循迹小车总体硬 件结构图
传感器 的发射管发 出红外线 , 由接收管接收。同时 , 接收 的物理量被转化成 电信号 , 经过信号放大电路处理 , 由单片机 的P , 1P 0 P ,2 口输入 , 经过处理后 , 信号 由 P 0 P 1P 2 2 , 2 ,2 2 ,2 ,2 , 3 P 4 P 5口输 出给电机驱 动电路 的L 9 D芯片 , 而达到驱 动小 车行走 和循迹 的 目 P 23 从 的。循迹 时 , 由于红外线在 白色地板 和黑线 上的反射 系数不同 , 以可以根据三极管接收红外线 的强弱来决定小车 的走 向。本设 所 计采用三对红外传感器 , 采用 “ 一字型” n 分布。中间传感器接 收不 到反射 回来 的红外线 , 而左右两个传感器能接收到反射 回来 的红 外线 , 则小车直线前进 ; 当左边和 中间 ( 只有左 边) 或 的传感器接 收不到反射回来的红外线 , 只有 右边 传感 器能接收到时 , 明小车 说 向右偏离黑色轨道 , 则小车 向左转动 ; 同理 , 当中间和右边 ( 只有 右边 ) 或 的传感器接收不 到反射 回来 的红外线 , 只有左边传感器能 接收到时 , 明小车 向左偏 离黑 色轨道 , 说 则小车向右转动 , 而实现 自动循迹 。本设计中红外传感器离地面垂直距 离为 8m, 从 c 能在没 有强烈 日光干扰或在有 日光灯的房间里 , 完全能满 足探测要求 , 具有很好 的可靠性与抗 干扰能力 。
基于单片机STC89C52控制的智能小车

基于单片机STC89C52控制的智能小车摘要:该毕业设计是采用无线遥控基于单片机的功能实现的,当无线遥控器的某个按键按下时,无线发射器将按键信号以编码的形式在315MHz的频率上发射出去,无线接收器接收并放大发射信号同时解调出TTL电平信号送至单片机进行处理,单片机通过比较和识别接收来的无线遥控编码便可执行相应的遥控功能,从而实现智能小车的前进、后退、左转和右转的基本功能和伴随音乐演奏而闪烁的LED的开启与关闭的功能。
此外,我加入了温度传感器与时钟芯片,让它们在液晶显示器上显示其室温和时间,并用按钮进行时间的调控。
由于无线遥控模块是四路单向锁存模块,只能单线实现四个功能,所以发射模块的控制按键不够,根据需要,我仅仅用无线模块控制小车的前进和后退,停止,其它的采用按键调试,用按键来实现小车的前进/后退/左转/右转/音乐/时间调控等功能。
关键词:无线模块;液晶显示模块;电机驱动模块;音乐;智能小车目录引言................................................................3 1 整体方案设计....................................................4 1.1 整体方案设计的思路..............................................41.2 整体方案的流程图................................................42 避障遥控小车系统概况............................................4 2.1 SC2272无线遥控模块原理..........................................4 2.2 驱动原理的简介..................................................62.3 直流电机简介....................................................93 模块方案比较与论证.............................................12 3.1 车体设计.......................................................12 3.2 电机模块的选择.................................................12 3.3 电机驱动模块的选择.............................................123.4 控制器模块的选择...............................................134 系统硬件电路设计...............................................14 4.1 无线模块的设计.................................................144.2 直流电机的驱动模块.............................................155 软件的简单介绍.................................................16 5.1 KEIL的简介....................................................165.2 PROTUES的简介.................................................165.3 STC_ISP_V480的简介.............................................17 参考文献..........................................................18 附录一:实物图....................................................19 附录三:总程序.....................................................22引言随科学技术的进步,智能化和自动化技术越来越普及,也广泛应用于机器人玩具制造领域,使智能机器人越来越多样化。