柔性航天器动力学模型降阶的方法和策略研究
基于模型降阶的压电柔性结构动力响应分析
收稿日期:2008-01-21;修改日期:200804-23 基金项目:河北省自然科学基金项目(E2008000731);河北省教育厅科学研究计划项目(2006107) 作者简介:张京军(1963―),男,河南虞城人,教授,博士,硕导,从事智能结构振动主动控制研究(E-mail: santt88@); *何丽丽(1981―),女,河北保定人,硕士生,从事智能结构振动主动控制研究(E-mail: helili0910@); 高瑞贞(1979―),男,河北保定人,讲师,硕士,从事智能结构振动主动控制研究(E-mail: ruizhenemail@).
弹性模量 7.5842×10 N/m
10 2
密度 2743kg/m
3
泊松比 0.27
表 2 压电材料性质 Characters of the piezoelectric material
压电应力常数(c/m2) e33 23.3 e31 −6.5 e15 17 c11 12.6 c12 7.95 柔度系数(×1010N/m2) c13 8.41 c33 11.7 c44 23 c66 23.3
压电智能悬臂梁物理模型简图fig1physicalmodelpiezoelectricsmartcantileverbeam铝材料性质tablealuminummaterial弹性模量密度泊松比solid45758421010压电材料性质tablepiezoelectricmaterialpzt5h密度kgm相对介电常数压电应力常数cm柔度系数1010e33e31e15c11c12c13c33c44c66solid57700169753146826233651712679584111723233统前25阶模态圆频率tablefirst25anteriormodalfrequencies27169477943215752378336345375913圆频率301875261039125817332615369049651011121314151617187505932911405137551640819394227492651830751圆频率6436807697711141413362158351876222122259391920212223242535507408574688553693614037016380160圆频率30261351474067346928540206207771252压电驱动器压电传感器悬臂梁2412简化d优化准则目标函数在实际系统中使用压电元件实现振动主动控制同时存在数目优化和位置优化的问题
柔性机器人的动力学建模与控制

柔性机器人的动力学建模与控制柔性机器人是一类具有柔性和柔顺性的机器人,其外壳和关节采用柔性材料和设计,可以实现更加丰富和自然的运动,更加灵活、安全和适应性。
与传统硬体机器人相比,柔性机器人可以更好地适应不同的工作环境和任务,具有更高的可操作性和可靠性,对人类社会的未来产生了巨大的潜力和影响力。
然而,柔性机器人的动力学建模和控制仍然是一个极具挑战性的问题。
相比于硬体机器人,柔性机器人的形变和运动涉及到复杂的力学和弹性学原理,同时受到环境摩擦和可变负载的影响,使得其动力学行为难以精确建模和预测。
因此,如何对柔性机器人进行动力学建模和控制,是现代控制理论和工程技术中的一大难题,需要专家攻克。
一、柔性机器人的动力学建模在建模柔性机器人的动力学行为时,需要考虑以下几个因素:1. 机器人的几何和动力学参数:包括机器人的长度、关节角度、弹性和质量分布等参数。
2. 机器人的弹性特性:包括弹性变形、弹性恢复和振动等特性,需要采用计算机模拟和实验测试的方法进行分析。
3. 机器人的动力学方程:基于牛顿-欧拉公式和拉格朗日公式,可以建立机器人的动力学方程,并对其进行数值求解和仿真验证。
针对以上因素,我们可以将柔性机器人的动力学建模方法分为以下几类:1. 基于有限元模型的建模方法:该方法通过建立机器人的有限元模型,对机器人的振动和弹性变形进行仿真和分析,可以得到高精度的柔性机器人模型。
2. 基于传送带模型的建模方法:该方法将机器人的柔性部分视为弹性传送带,运用传送带理论对其进行建模和控制,可以有效地降低建模复杂度。
3. 基于状态空间模型和神经网络模型的建模方法:该方法通过构建机器人的状态空间模型和神经网络模型,对机器人的动力学行为进行分析和预测,可以实现更加精确和鲁棒的控制效果。
二、柔性机器人的控制方法在进行柔性机器人的控制时,需要考虑以下几个因素:1. 机器人的运动控制:包括机器人的合理路径规划、速度控制和轨迹跟踪等,以实现机器人的准确执行不同的任务。
关于柔性航天器动力学模型降阶问题
On the Order Reduction of Dynamics Models of
Flexible Spacecrafts
作者: 缪炳祺[1] 曲广吉[2] 夏邃勤[1] 程道生[2]
作者机构: 浙江工业大学机电学院,杭州,310014[1] 北京空间飞行器总体设计部,北
京,100086[2]
出版物刊名: 中国工程科学
页码: 60-64页
主题词: 柔性航天器 动力学模型 模型降阶 设计 动力学仿真
摘要:针对柔性航天器动力学模型的降阶问题,综述了动力学建模中几种常用的模态集,介绍了用于选择系统保留模态的有关准则.通常的模态价值分析和内平衡理论是用于航天器系统模态的选取,而不是直接用于动力学建模时的部件模态或系统结构弹性变形模态的选取,因而存在如何应用上述准则于动力学建模的问题.为此,提出了一个动力学建模时的降阶策略;还提供了一个数值例子,以对采用不同的模态集建模时的结果进行比较,并表明如何采用上述准则于航天器的动力学建模.。
柔性航天器在轨振动主动控制研究

柔性航天器在轨振动主动控制研究柔性航天器在轨振动主动控制研究摘要:柔性航天器是一种采用柔性结构材料构造的航天器,具有重量轻、结构自抗力高、耐久性好等优点。
然而,在轨道工作时,航天器会受到各种外界扰动引起的振动,这对航天器的性能和工作条件带来了挑战。
因此,研究如何对柔性航天器进行主动控制成为了一个热点领域。
本文介绍了柔性航天器在轨振动的一些特点和挑战,并提出了一种主动控制方法,以降低振动对航天器的影响。
1. 引言柔性航天器由于重量轻、抗振性强的特点,被广泛应用于卫星、空间站和太空探测器等领域。
然而,由于外界扰动的存在,柔性航天器会出现不同程度的振动,这不仅会影响航天器的性能,还会减少其工作寿命。
因此,研究如何对柔性航天器进行主动控制成为了许多研究人员关注的焦点。
2. 柔性航天器在轨振动的特点在轨道工作时,柔性航天器会受到多种外界扰动所引起的振动,包括宇宙尘埃、宇宙辐射、太阳风等。
这些扰动会导致航天器的振动频率和幅度增大,对航天器的结构造成很大的影响。
此外,柔性航天器的结构材料通常具有频率响应宽、阻尼性能差、模态密度高等特点,这也增加了对振动的敏感度。
3. 柔性航天器振动主动控制方法为了降低柔性航天器在轨振动的影响,研究人员提出了多种主动控制方法。
其中,最常用的方法是采用主动振动控制系统,通过在柔性航天器上安装伺服执行器和传感器,在不同位置和方向上施加力或扭矩,来主动调节和控制振动。
4. 主动控制算法为了实现有效的主动振动控制,研究人员设计了多种控制算法,如PID控制、自适应控制和模型预测控制等。
其中,模型预测控制是一种广泛使用的算法,它通过建立柔性航天器的数学模型,并根据此模型进行振动控制。
5. 实验验证为了验证主动控制方法的有效性,研究人员进行了一系列实验。
实验结果表明,主动控制方法能够明显降低柔性航天器的振动幅度和频率,提高其结构的稳定性和寿命。
6. 结论柔性航天器在轨振动是一个具有挑战性的问题,但通过采用主动控制方法,可以有效地降低振动对航天器的影响。
柔性航天器动力学建模及模型降阶研究
mo e e u t n a e iv siae .T esmu ain r s l e n taet a es g e td a p o c a i n f ce t d lr d ci r e t td h i l t e u t d mo sr t h t h u g s p r a h i v l a d e iin o n g o s t e s d c mp e t te d lr d c in o a d wi oh rmo e e u t . r h o KEY ORDS:F e i l mu i o y d n mis p c c atd n mi smo ei g W lxb e h b d y a c ;S a e r y a c d l ;Mo e e u t n f n d lr d ci o
对航天器多柔体系统动力学方程进行 了仿真分析 , 飞行姿态稳定 , 了精度要求 , 结果 满足 表明了动力学建模与模 型降阶法的
有 效 性 和 正确 性 。
关键词 : 多柔体动力学 ; 航天器动力学建模; 型降 阶 模
中图 分 类 号 : 3 37 O 1 . 文 献标 识 码 : A
Re e r h o na is M o e i g s a c n Dy m c d ln
ABS RACT : h y a c d l ga d mo e e u t n o lxb e mu i o y s a e rf ae c n en d T T e d n mi smo ei n d lr d c i ff il h b d p c c at r o c r e .F rt , n o e i l sy t e moin e u t n a dl e rz t n e u t n o h b d y tm r e v d b s d o a rn in a p o c ems h t q ai n i a iai q ai fmu io ys s o o n o o e a ed r e a e n L g a g a p r a h i tr i n o u s —c o d n ts b s d o s mi g mo e me h d h n n o d rt e r a e c mp tt n,a n v lmo e e f a i o r iae a e n a u n d t o .T e ,i r e o d ce o u ai q s s o o e d lr -
大柔性飞行器气弹系统建模及稳定性分析
针对大柔性飞行器的气弹系统 特性,设计合适的控制器和优 化算法,以实现稳定控制和性 能提升。
模型验证与仿真
01
通过实验验证大柔性飞行器气 弹系统模型的准确性和有效性 。
02
利用数值仿真方法对大柔性飞 行器气弹系统的动态行为进行 模拟和分析,验证控制策略的 有效性。
03
对大柔性飞行器气弹系统的不 同工况进行仿真实验,评估系 统的稳定性和鲁棒性,为优化 设计提供依据。
04
气弹控制技术研究
鲁棒控制算法设计
不确定性描述
针对大柔性飞行器的气弹系统不确定性,设计鲁棒控 制算法,以减小不确定性的影响。
控制性能优化
优化控制算法的性能,以提高系统的稳定性和鲁棒性 。
实验验证
通过实验验证鲁棒控制算法的有效性和性能。
自适应控制算法设计
系统模型
建立大柔性飞行器的气弹系统模型,为自适应控 制算法设计提供基础。
目前的研究主要集中在仿真验证上,未来可以通过实验验证或者 实际飞行测试来进一步验证所提出的方法的有效性和鲁棒性。
感谢您的观看
THANKS
气弹控制系统应用案例
总结词
提高气弹控制精度、增强控制稳定性、 优化控制系统设计
VS
详细描述
通过对大柔性飞行器气弹系统进行建模, 研究人员可以更准确地预测和控制飞行器 的气动特性。通过精细化设计和参数优化 ,可以提高气弹控制精度和稳定性,进一 步优化控制系统设计。这些成果可以为气 弹控制系统设计人员提供重要的参考依据 ,以提高控制精度和稳定性。
考虑大柔性飞行器的几何非线性、材料非线性和气动非线性,建立更精确的动力学 模型。
针对大柔性飞行器的特殊结构,引入适当的非线性模型描述其复杂的动态特性。
可变构型复合柔性结构航天器动力学建模研究
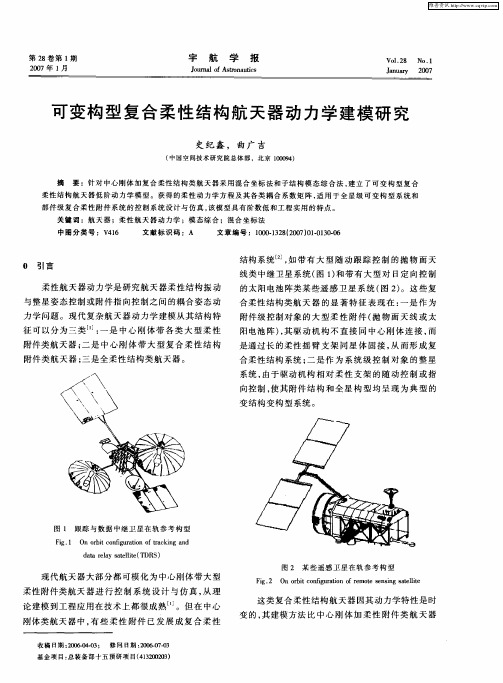
Fi 2 On ob tc n g r t n o e t e sngs tli g. ri o i f u ai fr moe sn i aelt o e
这类 复合柔 性结 构航 天器 因其 动力学特 性是 时
刚体类 航天 器 中 , 些 柔 性 附 件 已发 展 成 复 合柔 性 有
史 纪 鑫 等 : 变 构 型 复 合柔 性结 构航 天器 动力 学建 模 研 究 可
11 3
复杂 的多 , 必须 在混 合 坐 标 和 正则 模 态 建 模 方法 的 基础上 进行 发展 , 以满 足 控 制 系统 对 全 星 级 和 附件
式 中 , 为星体 质 心相对 标称 位 置 的摄 动量 ;
的太 阳电池阵 类某些 遥感 卫 星 系统 ( 2 。这 些 复 图 ) 合柔性 结构 类航 天 器 的 显 著特 征 表 现 在 : 是 作 为 一 附件 级控 制对 象 的大 型柔 性 附 件 ( 物 面 天线 或 太 抛 阳电池 阵) 其驱 动 机 构 不 直接 同 中心 刚体 连 接 , , 而 是通过 长 的柔性 摇 臂 支 架 同星 体 固接 , 而形 成 复 从 合柔性 结构 系统 ; 是 作 为 系 统级 控 制 对象 的整 星 二 系统 , 由于 驱动 机构 相 对 柔 性 支架 的随 动控 制 或 指 向控 制 , 其 附件 结 构 和 全 星 构 型均 呈 现 为典 型 的 使 变结 构变构 型 系统 。
=
c + c c + + u + u 。
() 2
及其 各类耦 合 系数 表 达式 , 并通 过 算 例 对 其 正确 性
进行 了校 验 。
其 中
=
c +
+
c+ :
c :
多充液可机动柔性航天器模块化建模和耦合动力学分析
第35卷第1期2024年3月广西科技大学学报JOURNAL OF GUANGXI UNIVERSITY OF SCIENCE AND TECHNOLOGY Vol.35No.1 Mar.2024多充液可机动柔性航天器模块化建模和耦合动力学分析罗厚麟,吴文军*,王佐(广西科技大学机械与汽车工程学院,广西柳州545616)摘要:针对现代航天器因携带多类型充液贮箱及可机动柔性附件而导致的动力学建模困难,文中基于参数辨识理论和有限元方法实现了该类复杂航天器的模块化建模。
首先,考虑航天器运行时贮箱内液体的小幅晃动问题,利用球形贮箱小幅晃动的参数化模型推导出球形充液贮箱小幅晃动的动力学方程;其次,根据薄板小幅振动理论,运用有限单元法建立柔性附件四边形板单元动力学模型,将附件相对航天器变化的姿态角代入坐标转换矩阵,构造柔性附件作大范围机动时的时变坐标转换矩阵。
再次,基于凯恩方程推导航天器整体系统的动力学状态方程,利用MATLAB软件编制出相应的模块化建模程序。
最后,通过数值算例分析,研究典型构型航天器中柔性附件以不同方式机动的系统整体耦合动力学性能,验证了该建模方法的通用性、适用性和准确性。
关键词:充液柔性航天器;参数化模型;有限单元法;凯恩方程;模块化建模中图分类号:V412.4;V448.2DOI:10.16375/45-1395/t.2024.01.0010引言现代航天器不断向多任务、模块化和长寿命方向发展,携带诸多设备和大尺寸柔性附件的航天器是复杂的刚-液-柔耦合系统,准确建立系统动力学模型不仅能描述航天器系统的耦合动力学特性,也能为系统控制律的设计提供理论依据和前期研究基础。
航天器的典型构型通常为中心刚体携带多个充液贮箱,外侧连接太阳能帆板。
太阳能电池板因具有较大长宽尺度和极小厚度的几何尺寸特征,根据具体长宽比可简化为Euler-Bernoulli梁模型[1-3]或Kirchhoff-Love薄板模型[4]。