KUKA七轴电机更换指导文件.
KUKA外部轴配置方法,偷偷分享的
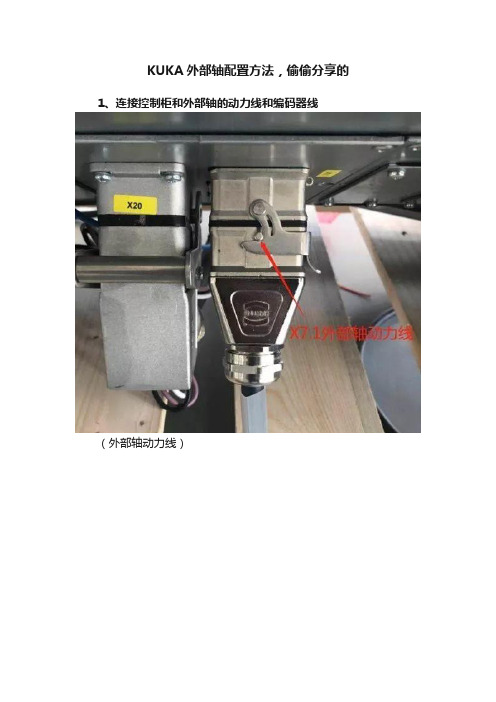
KUKA外部轴配置方法,偷偷分享的1、连接控制柜和外部轴的动力线和编码器线
(外部轴动力线)
(连接机器人底部RDC编码器线)
2、Workvisual外部轴添加与配置
(1)根据机器人控制柜内部实际的KPP和KSP型号添加:(右键控制系统组件添加)
(2)确认电机铭牌上的电机型号:
(开头MG/ME光轴与键槽轴的区别)
(3)根据电机型号添加选项:
(右键设备视图添加电机型号)
(4)在单元配置中将添加的外部轴电机与控制柜连接:(拖住电机连接控制柜)
(5)右键电机--驱动装置配置--(根据实际接线图连接电机):
(外部轴电机连接错误,导入项目提示报警编码器故障):
(6)右键电机--机器参数配置(配置电机需要的参数):
(7)配置完成后,项目编译导入机器人控制柜。
(8)导入项目后进行安全配置:(注意切换安全员用户)
(9)外部轴零点丢失(进行零点校正):
(10)外部轴动作方式的切换:。
KUKA 机器人调试标准化作业指导书

----------------------------------------- 此处增加空格,使注释与位置点层次分明 LIN P6 Vel= 0.15 m/s CPDAT1 SEARCH VIA P7 CD1 PA0 Tool[1]:tcp Base[17]:e_45
X、Y、Z : 工具坐标系统的原点,针对法兰坐标系统
A、B、C: � 工具坐标系统的取向,针对法兰坐标系统
5
� TCP 测量方法 a)XYZ—4 点法:确定工具原点相对机器人法兰坐标系原点的位置。 b)准备运行→测量→工具→XYZ 4 点
4-点检测对话窗口打开:
6
c) 为要测量的工具给定一个编号和名称。用 OK 键确认。自动打开下一个窗口
10
认。 f) 按下保存键
五.校直线轴及校变位机的坐标系
� 外部运动系统的数据(耦合关系)必须正确地输入机床数据中 a) Setup>Service>Axisconfigurtor
b) 进入到“Est.Kinematics”表格中(见下图)。
11
c) 在表格中将这个运动系统中固定的不变的数据输入。(最多能存储 6 个外部运动系统的数据,直线轴坐标
8
选择这个菜单后,下面的对话窗口打开:
b) 输入已安装工具的编号。用OK键确认。
9
c) 用 TCP 驶至任一个参考点(将焊枪喷嘴垂直水平面, TCP 200mm范围没有碰撞物),用OK键 确 认 。
库卡机器人维保操作规程
库卡机器人维保操作规程一、程序备份由专业人员进行程序备份,备份前必须对U盘进行病毒查杀确认无误。
二、换油(型号:Castrol嘉实多Optigear Synthetic RO150 20L)1、五个伺服电机安装部位均需更换库卡专用油;2、更换前先将进油口处进行清洁;3、放油:收纳至桶内,统一进行处理,放完后装好出油口;4、记录放出的油量,便于加油时明确加油量;1)轴1:4.75L2)轴2:0.7L3)轴3:1.9L4)轴4:0.8L5、加油:待油放尽后,从各伺服电机进油口进行加油;1)轴1:5.6L2)轴2:0.8L3)轴3:1.9L4)轴4:0.8L5)轴5:0.3L6、加油完成后紧固进口螺栓,确保不泄露。
三、机器人本体检查1、电缆接头检查、线路有无破损检查;2、螺丝紧固及清灰工作。
四、控制柜检查1、柜内外清灰,机柜背部打开保护壳,对散热风扇等清灰除尘;2、电路板供电电池(型号:威神VISION CP1250H 12V 5AH)电源电压低于12V时,进行更换。
注:更换电池时,可不必断电,逐个进行更换;3、控制柜电源电压检测(380V)是否平衡;4、24V电源接头检测,用万用表测量电压。
五、示教器检测1、鼠标手柄检测,上下左右操作顺畅;2、手自动转换键检测,转换自如;3、屏幕显示检测。
六、限位报警检测1、手动操作机器人各轴,查看限位报警是否正常;2、检查各轴机械动作是否正常;3、检查机械手转向、起落、抓放功能是否正常。
七、急停开关检测1、手动检测急停开关是否正常;2、报警后检测复位功能是否正常。
八、机器人运行实测维护完成后,上料进行运行实测,完成一组托盘码放程序。
九、维护结束填写相关维护记录。
kuka调试文档(优选.)

分几部分调试过程中涉及到的电路原理图,见设计原理图。
接线按照电气原理图,接线即可。
上电线接好后上电RDT第一次上电,在示教盒界面上会提示“从机器人读取信息”,选择读取。
机器人的相关信息就会读到控制柜内部的工控机。
具体操作如下:登陆专家权限,“set up”->”robot data”->,弹出状态窗口,提示“从机器人读取数据信息到硬盘”或是“从硬盘读取信息到机器人”。
选择“从机器人读取数据到硬盘”Master出厂前,厂家检验了各个轴,一般来说,我们上电后,由于最初是吊装姿态。
所以会提示2轴丢失。
从新检测校验2轴即可。
按“开机运行”菜单键,一个菜单键打开,选择“校正”选项,确定选择“千分尺”。
如下图:打开一个待校正的状态窗口:需要校正的轴按顺序显示,下一个需要校正的轴彩色背景显示。
已经校正好的轴补列出。
2轴丢失,校验2轴即可。
两项驱动配置(Device net和Profibus驱动配置)除原有文档相关说明,还需播地址设置波特率1-6地址组合7-8波特率组合在Device NET适配器上有标明的相关说明,根据需要按照说明设置即可。
KUKA与Devicenet之间的I/O配置总结1、将Devicenet模块装好,数字输入、数字输出、模拟输入、模拟输出各模块之间的顺序可以任意。
但是要注意:WAGO的Devicenet模块中,模拟量的地址在数字量之前,需要先配置模拟量。
2、配置I/O需要专家权限。
按菜单:Configure ——> User Group按下方功能键“expert”,在状态窗口输入密码(KUKA),按回车等待进入专家界面。
3、在KUKA的KCP上按菜单:Configure——> I/O Driver ——> I/O Driver Reset在状态窗口上出现机器人控制器中安装的所有I/O驱动,选择devicenet,按下方功能键“Config.”,状态窗口下方出现devnet.ini,选择这个文件按回车打开文件,在这个文件中设置波特率(baudrate)和栈号(macid,即拨码开关号)。
(完整版)KUKA简单操作说明书

KUKA简单操作说明书一、KUKA控制面板介绍1、示教背面在示教盒的背面有三个白色和一个绿色的按钮。
三个白色按钮是使能开关(伺服上电),用在T1和T2模式下。
不按或者按死此开关,伺服下电,机器人不能动作;按在中间档时,伺服上电,机器人可以运动。
绿色按钮是启动按钮。
Space Mouse为空间鼠标又称6D鼠标。
2、示教盒正面急停按钮:这个按钮用于紧急情况时停止机器人。
一旦这个按钮被按下,机器人的伺服电下,机器人立即停止。
需要运动机器人时,首先要解除急停状态,旋转此按钮可以抬起它并解除急停状态,然后按功能键“确认(Ackn.)”,确认掉急停的报警信息才能运动机器人。
伺服上电:这个按钮给机器人伺服上电。
此按钮必须在没有急停报警、安全门关闭、机器人处于自动模式(本地自动、外部自动)的情况下才有用。
伺服下电:这个按钮给机器人伺服上电。
模式选择开关:T1模式:手动运行机器人或机器人程序。
在手动运行机器人或机器人程序时,最大速度都为250mm/s。
T2模式:手动运行机器人或机器人程序。
在手动运行机器人时,最大速度为250mm/s。
在手动运行机器人程序时,最大速度为程序中设定的速度。
本地自动:通过示教盒上的启动按钮可以使程序自动运行。
外部自动:必须通过外部给启动信号才能自动执行程序。
退出键:可以退出状态窗口、菜单等。
窗口转换键:可以在程序窗口、状态窗口、信息窗口之间进行焦点转换。
当某窗口背景呈蓝色时,表示此窗口被选中,可以对这个窗口进行操作,屏幕下方的功能菜单也相应改变。
暂停键:暂停正在运行的程序。
按“向前运行”或“向后运行”重新启动程序。
向前运行键:向前运行程序。
在T1和T2模式,抬起此键程序停止运行,机器人停止。
向后运行键:向后运行程序。
仅在T1和T2模式时有用。
回车键:确认输入或确认指令示教完成。
箭头键:移动光标。
菜单键:用菜单键打开相应菜单,通过箭头键选择子菜单,回车键使选中的菜单被应用。
用退出键退出打开的菜单。
更换电机轴承安全操作规程
更换电机轴承安全操作规程操作前准备1、穿戴好劳动保护用品。
2、准备工具、用具:900mm、450mm管钳各1把、375mm、300mm活动板手各1把、专用套筒板手1只、拔轮器1套、0.75kg锤子1把,专用小拔轮器1套,细砂纸2张、高速黄油1000g、软金属棒1根、1000mm撬杠2根、同规格的电机轴承2套,绝缘手套1只,试电笔1支,记录笔,班报表。
操作步骤1、用试电笔检测电控柜外壳确认安全,打开打控柜门,按停止按钮,根据油井实际生产的情况,将抽油机驴头停在合适位置,刹紧刹车,侧身拉闸断电,关好电控柜门,断开铁壳开关,记录停抽时间,检查刹车,以刹车锁块在其行程范围的1/2~2/3之间,各部件连接好为宜。
2、电机轴有锥度或带套子可先将电机皮带轮固定螺母卸下或将盖板卸下。
3、卸下电机前顶丝,卸松电机的四条固定螺丝,用撬杠将电机向前移动,将传动皮带卸下。
4、更换电机皮带轮一端轴承:将拔轮器装好,用管钳咬住拔轮器顶丝后端,用力均匀转动顶丝杠,将电机皮带轮卸下。
5、用板手卸下电机轴承盖固定螺丝,卸下轴承盖,卸下电机端盖。
6、将专用小拔轮器装好,用管钳咬住拔轮器顶丝后端,用力均匀转动顶丝杠,将电机原轴承卸下。
7、清理干净电机定子轴,套上新轴承,垫上软金属棒,用榔头均匀敲进安装到位。
8、对新换轴承涂黄油保养润滑,装好电机端盖和电机轴承盖,上好电机皮带轮和传动皮带。
9、更换电机风扇一端轴承:卸下电机风扇罩盖,用卡钳取下风扇卡簧,卸下电机风扇,卸掉电机风扇端的电机端盖。
10、按1.32.2.6~1.32.2.7的操作步骤更换轴承。
11、对新换轴承涂黄油保养润滑,装好电机端盖和电机风扇,上好电机风扇罩盖。
12、检查抽油机周围无障碍物,缓慢松刹车,合上铁壳开关。
用试电笔检测电控柜外壳,确认安全,打开电控柜门,侧身合闸送电。
按启动按钮,利用曲柄惯性启动抽油机,关好电控柜门,记录开抽时间。
13、收拾擦拭工具、用具,并摆放整齐。
KUKA七轴电机更换指导文件

信息 高效 落实
信息 高效 落实
Karosseriebau T-C-PR-2
KUKA七轴电机更换指导书
2013年06月06日
信息 高效 落实
重点注意事项
重点关注 1、更换电机时注意轻拿轻放,防止损坏电机。 2、电机从减速器抽出或者装入减速器时要注意水平运动,防止电机和减速器 的花溅磨损。 3、新安装的电机的电源线插头方向可能和原来的插头方向不一致,如果方向 不一致导致原电缆长度不够的话,可以先更改插头方向,之后再进行电缆连接。 4、电机安装完毕后要进行力矩校验,防止力矩不够。 5、电机更换工作完成后要注意清理现场,防止废弃物或者工具遗留在现场卡 入机器人七轴轨道内。 6、更换完电机后,无论机器人零点丢失与否都要对七轴进行零点校正(一般 情况下更换完电机,机器人零点丢失,机器人要提示进行零点校正)。 7、所有工作完成后要进行手动试车,防止出现零点偏差而导致轨迹偏移。
信息 高效 落实
测试过程
第一步:开机
机器人柜开机,把机器 人打到七轴零点的预校 准位置。
第二步:零点校正
把EMT连接到机器人上, 对机器人七轴零点进行 重新校正。
信息 高效 落实
测试过程
第三步:手动试车
机器人手动打回原点进 行手动试车。先慢速进 行走轨迹以免发生碰撞。
第四步:自动试车
手动试车没有问题后, 把机器人上自动进行试 车,上自动时速度也要 逐渐加上去。
信息 高效 落实
拆卸过程
第一步:关机
把机器人打到合适位置 后,保存机器人零点数 据后关机。
第二步:拆电缆
拆下七轴电机的电源线 和编码器线。拆下后注 意保护电缆接头。
信息 高效 落实
拆卸过程
第三步:拆卸螺栓
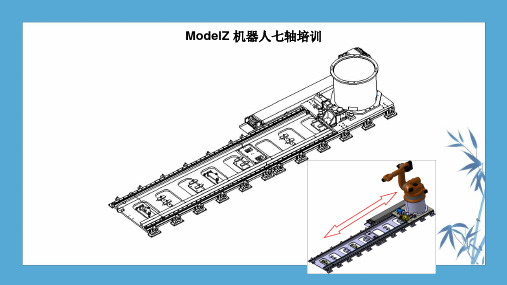
KUKA工业机器人培训资料ModelZ 机器人七轴培训 V1.1
安装基准面
底座
齿条安装、更换
相反齿条
六、齿条安装
安装步骤:
⒈设备第一次安装时,齿条按顺序放置于基 准面上。
[注意]:a.安装或更换前,首先检查基准面, 确保其表面无杂质; b.固定齿条时应逐渐逐个紧固锁紧 螺栓。
⒉当需要更换齿条时要求:利用相反齿条固 定连接结构逐个操作(即卸下一根安装 一根)
齿条
七、七轴安装
安装步骤: ⒈ 首先,将伺服电机和减速机连接好。 ⒉ 其次,将齿轮与减速机(间隙配合H8/h7)连接好。 ⒊ 将减速机连接于机座上,机座固定螺栓稍施加点预紧力,将塞尺(0.15mm)置于齿条上,
在Y向上整体调整齿轮齿条的中心距,调整好后抽出塞尺锁紧机座上的固定螺栓即可。 ⒋ 拆卸更换齿轮时,将减速机与齿轮整体拆下,均匀轻敲齿轮周边直至卸下更换。
4.2齿轮、齿条润滑保养
齿条图号:78-38D_412069_____05~(厂商:大连奥托) 齿轮图号:78-38D_412069_____25~(厂商:大连奥托) 维护原则:
①定期(1个月)进行齿轮、齿条润滑的检查; ②当发现七轴的直线往复重复精度>0.1mm时,可以请专业人员对齿轮、齿条进 行检测分析,如果损坏即刻更换。
Y
塞尺
八、Z向高度检测装置
功能:用于设备使用过程中阶段性监测(主要是目测) 安装步骤: 安装参考基准:地面Z向检测基准面,安装应参考底座位置; 安装位置:在近机器人工作端根据设备长度增加2处或3处; 检测:
空载时,两侧导轨测量一组比较数据; 满载时,同上。 如果偏差值>0.2mm即可维修调整。
Z向高度检测步骤: ① 首先,进行维护前操作安全检查,确保安全后操作人员方可进
齿轮 加油器油杯 加油器油杯
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
测试过程
第一步:开机
第二步:零点校正
信息 高效 落实
机器人柜开机,把机器 人打到七轴零点的预校 准位置。
把EMT连接到机器人上, 对机器人七轴零点进行 重新校正。
测试过程
第三步:手动试车
第四步:自动试车
信息 高效 落实
机器人手动打回原点进 行手动试车。先慢速进 行走轨迹以免发生碰撞。
手动试车没有问题后, 把机器人上自动进行试 车,上自动时速度也要 逐渐加上去。
信息 高效 落实
Karosseriebau T-C-PR-2
KUKA七轴电机更换指导书
信息 高效 落实
2013年06月06日
重点注意事项
重点关注
1、更换电机时注意轻拿轻放,防止损坏电机。
2、电机从减速器抽出或者装入减速器时要注意水平运动,防止电机和减速器 的花溅磨损。
3、新安装的电机的电源线插头方向可能和原来的插头后再进行电缆连接。
4、电机安装完毕后要进行力矩校验,防止力矩不够。
5、电机更换工作完成后要注意清理现场,防止废弃物或者工具遗留在现场卡 入机器人七轴轨道内。
6、更换完电机后,无论机器人零点丢失与否都要对七轴进行零点校正(一般 情况下更换完电机,机器人零点丢失,机器人要提示进行零点校正)。
7、所有工作完成后要进行手动试车,防止出现零点偏差而导致轨迹偏移。
信息 高效 落实
拆卸过程
第一步:关机
第二步:拆电缆
信息 高效 落实
把机器人打到合适位置 后,保存机器人零点数 据后关机。
拆下七轴电机的电源线 和编码器线。拆下后注 意保护电缆接头。
拆卸过程
第三步:拆卸螺栓
第四步:抽出电机
信息 高效 落实
用棘轮六角和加长杆把 电机上的4颗固定螺丝拆 除。
把电机从减速器里抽出。 抽时注意水平用力,防 止损坏电机。
安装过程
第一步:润滑电机转轴
第二步:紧固电机螺栓
信息 高效 落实
把新电机的花溅上涂抹 少许黄油,然后把电机 送入减速器中。
电机送入到位后紧固固 定螺丝,螺丝的力矩为 45NM。
安装过程
第三步:连接电缆
第四步:清理现场
信息 高效 落实
安装好电机电源线和电 机编码器线。
清理好现场的工具及杂 物,防止对现场机器人 轨道造成伤害。