工件在夹具中的夹紧共20页
合集下载
第三章-工件在夹具中的夹紧
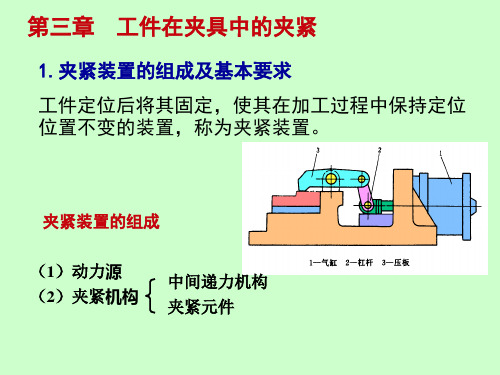
2.液压夹紧
液压夹紧是利用液压油为工作介质来传力的 一种装置。它与气动夹紧比较,具有夹紧力稳定、 吸收振动能力强等优点,但结构比较复杂、制造 成本高,因此适用于大量生产。液压夹紧的传动 系统与普通气压系统类似。
3、气-液组合夹紧
气-液组合夹紧的动力源为压缩空气,但要使用 特殊的增压器,比气动夹紧装置复杂。它的工作原理 如图所示,压缩空气进入气缸1的右腔,推动增压器 活塞3左移,活塞杆4随之在增压缸2内左移。因活塞 杆4的作用面积小,使增压缸2和工作缸5内的油压得 到增加,并推动工作缸中的活塞6上抬,将工件夹紧。
削扭矩M 将使工件绕中心旋转,当钻头的刃带进入切削时,
产生的钻削扭矩最大,此时应为工件夹紧的最不利情况。
2.按静力平衡原理列出平衡式并计算夹紧力W
由图可知,钻削扭矩M有使工件产生转动的趋势,这 需要由夹紧力W在夹紧点所产生的摩擦阻力矩及由钻削力P 和夹紧力W所产生的支承反力在工件和定位面间产生的摩 擦阻力矩相平衡,即有平衡式:
升角:是工件上受压面与旋转半径的法线行 程的夹角。从几何关系可知,它是由转轴中心O点 和偏心几何中心C点,分别与夹紧点的连线所形成 的夹角。
P
max
e r
2)圆偏心夹紧的自锁条件
P点夹紧时能自锁,则可保证其余各点均可自锁
自锁条件 αmax ≤ 1 + 2
1-圆偏心轮与工件处的摩擦角。 2-圆偏心轮与转轴处的摩擦角。 tgαmax ≤ tg e/r ≤ , 取μ=0.1~0.15,
M / Q/ l
/
QL Q/ l
M M/
Q/ Q L l
N N
H1
H2 F1
F2
W
W
Q// H2 F2 W H1
第三章 工件在夹具中的夹紧

F1 F2
1 F 2
F ( L1 L2 ) 2 FR L
F 2 FR L ( L1 L2 )
2 K FR L F K ( L1 L2 )
3-3 夹紧机构设计
(1)斜楔夹紧机构
工作原理:利用楔块的斜面将楔块的推力转变 为夹紧力,从而夹紧工件。
1.根据加工简图,确定对工件夹紧的最不利的瞬时状 态。钻削力P使工件压向定位面,有利于工件夹紧,而钻 削扭矩M 将使工件绕中心旋转,当钻头的刃带进入切削时, 产生的钻削扭矩最大,此时应为工件夹紧的最不利情况。
2.按静力平衡原理列出平衡式并计算夹紧力W
由图可知,钻削扭矩M有使工件产生转动的趋势,这 需要由夹紧力W在夹紧点所产生的摩擦阻力矩及由钻削力P 和夹紧力W所产生的支承反力在工件和定位面间产生的摩 擦阻力矩相平衡,即有平衡式:
N
N
H1
Q // H 2 F 2
W H1
Q // Q / cos
H2
F1 F2
Q//
F 2 W tg 2
H 2 H1 tg( 1 ) W tg( 1 )
W
W
Q / cos W tg ( 1 ) tg 2
1 acrtg artg0.15 8032 /
1/ acrtg(1.15tg1 ) 90 47 /
80 62 W 2024 .48 N 0 / 0 / 10.86 tg (2 56 9 47 ) W N 2 sin 2 D M 夹=(N B N C WA ) 2 1 W D 2024 .48 0.18 0.1 1 = 1 = 1 0 2 sin 2 sin 45 2 =43.99 N m
第四章第5节工件的夹紧及夹紧装置 (2)
3. 夹紧力的大小
夹紧力的大小可根据切削力和工件重力的大小、 方向和相互位置关系具体计算。为安全起见,计算 出的夹紧力应乘以安全系数K,故实际夹紧力一般比 理论计算值大2~3倍。
进行夹紧力计算时,通常将夹具和工件看做一 刚性系统,以简化计算。根据工件在切削力、夹紧 力(重型工件要考虑重力,高速时要考虑惯性力)作用 下处于静力平衡,列出静力平衡方程式,即可算出
的原始夹紧行程增加的倍数等于夹紧力的增力倍
数,即夹紧行程增大多少倍,夹紧力就增加多少
倍。
0.017455 0.052408 0.087489
0.12278 0.15838 0.19438
0.23087 0.26795 0.30573
0.34433
2、选用斜楔夹紧工件时,只要升角 取得合适, 就能实现夹紧机构的自锁。
3. 偏心夹紧机构是由偏心件作为夹紧元件,直接 夹紧或与其他元件组合实现对工件的夹紧。常用的
图3-35是一种常见的偏心轮—压板夹紧机构。 当顺时针转动手柄使偏心轮绕轴转动时, 偏心轮的 圆柱面紧压在垫板上,由于垫板的反作用力,使偏 心轮上移,同时抬起压板右端,而左端下压夹紧工
图3-35 偏心轮—压板夹紧机构
斜楔夹紧机构受力分析
夹紧力 Fc 是由作用在斜楔上的外力 Fe,x 产生的。
工件对它的反作用力 Fr1 和由此引起的摩 擦力 Ff1 、夹具体对它的反作用力 Fr2 和 由此引起的摩擦力 Ff 2 。
夹紧时,存在如下关系 考虑X方向上的受力平衡
将上述参数代入上式,可得斜楔所产生的夹紧力
由上式得如下结论
图3-43 先定位后夹紧联动机构
图3-43 先定位后夹紧联动机构
(2) 夹紧与移动压板联动机构。 如图3-44所示,逆时针扳动手柄,先是拨销1拨 动压板2上的螺钉3,使压板左移到夹紧位置,继续 逆时针扳动手柄,偏心轮5顶起压板夹紧工件。松开 时,顺时针扳动手柄,偏心轮5的作用先松开工件, 继而拨销1拨动螺钉4
夹紧原理与典型的夹紧

夹紧力的大小
对工件所施加的夹紧力,要适当。夹紧力过大,会引起工 件变形;夹紧力过小,易破坏定位。 进行夹紧力计算时,通常将夹具和工件看作一刚性系统, 以简化计算。根据工件在切削力、夹紧力 (重型工件要考虑 重力,高速时要考虑惯性力)作用下处于静力平衡,列出静 力平衡方程式,即可算出理论夹紧力。 为安全起见,计算出的夹紧力应乘以安全系数K,故实际夹 紧力一般比理论计算值大2∼3倍。
自锁条件 pmax12
式中: Φ1、 Φ2--材料的摩擦角。
αp-- P 点压力角
p arcs2D ienma,x
2e / D≤μ(偏心轮与工件的摩擦系数)
D/ e ≥2 / μ 一般μ=0.1~0.15
自锁条件:D/e≥14~20
D/e叫偏心轮的偏心特性,表示偏心轮的工作可靠性。
Fundamentals of Mechanical Manufacturing Technology
Fundamentals of Mechanical Manufacturing Technology
(2)楔块的自锁条件 当原始力撤除后,楔块在摩擦力的作用下仍然不会松开工件
的现象称为自锁。楔块在力FR1、FR2作用下平衡,此时摩擦
力的方向与楔块松开的趋势相反,自锁的条件应该是: 1 2
Fundamentals of Mechanical Manufacturing Technology
特点: 1. 夹紧迅速方便; 2. 夹紧力、行程小;增力比不大,自锁性不稳定; 3. 用于切削力小、振动小及工件尺寸公差不大的场合。
Fundamentals of Mechanical Manufacturing Technology
夹紧力的方向 ③夹紧力的方向应与工件刚度最大的方向一致,以减小工件 变形 。由于工件在不同方向上刚性不同,因此对工件在不同 方向施加夹紧力时所产生的变形也不同。
第三章 工件的夹紧及夹紧装置(夹具设计)
2.偏心夹紧机构-夹紧特点 圆偏心夹紧机构结构简单,操作方便,动作迅
速,但自锁能力较差,增力比小,(取决于L/ρ的 比值)。常用在切削平稳且切削力不大的场合。
机械学院
第二节 基本夹紧机构
2.偏心夹紧机构-适用范围
几种常见偏心夹紧机构
机械学院
第二节 基本夹紧机构
3.螺旋夹紧机构-分类
直接夹紧式螺旋夹紧机构:拉紧式和压紧式 移动压板式螺旋夹紧机构:支点式和内嵌式 铰链压板式螺旋夹紧机构:遮盖式、杠杆式、翻转式、联动式 可拆卸压板式螺旋夹紧机构:直拆式和旋拆式
机械学院
移动式压板端面偏心轮夹紧机构
移动式压板端面偏心轮夹紧机构:主要由两个端面凸轮在不同的旋 转角度上产生的轴向位移来实现夹紧动作。它的结构简单、紧凑, 占用空间小,操作方便,但自锁性能差一些,因此,其夹紧行程受 到一定限制。
机械学院
转动式压板端面偏心轮夹紧机构
转动式压板端面偏心轮夹紧机构:主要由端面凸轮和滑动杆在转动 一定角度时产生的位移来实现夹紧动作。它的结构也比较简单,操 作方便,由于是利用杠杆原理进行夹紧,其夹紧力比较大,但占用 的空间要大一些。
夹紧力作用点的选择
2)作用在工件刚度高的部位
机械学院
第一节 夹紧机构原理
3.确定夹紧力的基本原则
夹紧力的作用点与工件变形 a)工件底面产生夹紧变形 b)改进方案
机械学院
第一节 夹紧机构原理
3.确定夹紧力的基本原则
夹紧力作用点的选择
3)夹紧力的作用点和支承点尽可能靠近切削部位,以提高工件 切削部位的刚度和抗振性。
机械学院
第二节 基本夹紧机构
6.斜楔夹紧机构-适用范围
斜楔夹紧装置常用在尺寸公差较小的夹紧装置中,主要用 于机动夹紧,且毛坯质量较高的场合。
速,但自锁能力较差,增力比小,(取决于L/ρ的 比值)。常用在切削平稳且切削力不大的场合。
机械学院
第二节 基本夹紧机构
2.偏心夹紧机构-适用范围
几种常见偏心夹紧机构
机械学院
第二节 基本夹紧机构
3.螺旋夹紧机构-分类
直接夹紧式螺旋夹紧机构:拉紧式和压紧式 移动压板式螺旋夹紧机构:支点式和内嵌式 铰链压板式螺旋夹紧机构:遮盖式、杠杆式、翻转式、联动式 可拆卸压板式螺旋夹紧机构:直拆式和旋拆式
机械学院
移动式压板端面偏心轮夹紧机构
移动式压板端面偏心轮夹紧机构:主要由两个端面凸轮在不同的旋 转角度上产生的轴向位移来实现夹紧动作。它的结构简单、紧凑, 占用空间小,操作方便,但自锁性能差一些,因此,其夹紧行程受 到一定限制。
机械学院
转动式压板端面偏心轮夹紧机构
转动式压板端面偏心轮夹紧机构:主要由端面凸轮和滑动杆在转动 一定角度时产生的位移来实现夹紧动作。它的结构也比较简单,操 作方便,由于是利用杠杆原理进行夹紧,其夹紧力比较大,但占用 的空间要大一些。
夹紧力作用点的选择
2)作用在工件刚度高的部位
机械学院
第一节 夹紧机构原理
3.确定夹紧力的基本原则
夹紧力的作用点与工件变形 a)工件底面产生夹紧变形 b)改进方案
机械学院
第一节 夹紧机构原理
3.确定夹紧力的基本原则
夹紧力作用点的选择
3)夹紧力的作用点和支承点尽可能靠近切削部位,以提高工件 切削部位的刚度和抗振性。
机械学院
第二节 基本夹紧机构
6.斜楔夹紧机构-适用范围
斜楔夹紧装置常用在尺寸公差较小的夹紧装置中,主要用 于机动夹紧,且毛坯质量较高的场合。
第十二课 3-1夹紧装置

夹紧装置一般由三部分组成,即力源装置、中间递力 结构、夹紧元件。
夹紧元件
力源装置 中间递 (气动、液压、电动) 力装置
二、夹紧装置的组成——中间递力装置
夹紧元件
中间递 力装置
中间递力装置:人力或力源装 置产生的原始作用力转变为夹 紧作用力。
1、改变夹紧作用力的方向 左图:将气缸的水平作用力通过斜 楔、压板转变为垂直方向的夹紧力。
选用情况
0° ~ 45° 曲线的升程很小,通常不能快速趋近工件。 一般不采用
90° ~180°
前半段升程迅速增大,有利于快速趋近工 件; 后半段楔升角逐渐减小,曲线平缓, 有利于得到大 而稳定的有效夹紧力,且 自锁性良好。但在接近 180°时升程为零, 容易发生咬死。
常用
升程迅速增大,但后半部曲线楔升角较大, 适合于夹紧 不 利于有效夹紧,而且楔升角的变化值 方向尺寸误 45° ~ 135° 也大,工件厚度稍加变化,夹紧性能就有 差较大的工 较大差异,夹紧力和自 锁性的变化都较 件的夹紧。 大。
3.偏心夹紧机构
偏心轮一般有圆偏心轮和曲线偏心轮。
圆偏心轮有什么重要特性? 圆偏心轮的重要特性是:直径为 D,偏心距为
e 的圆偏心轮工作表面上各点的升角是连续变化的 值,轮缘上最大楔升角αmax = arcsin( 2e/D)。
3.偏心夹紧机构 圆偏心轮工件段的选择
圆偏心轮工作 曲线段的选择
曲线段特点
3.偏心夹紧机构 圆偏心轮的工作自锁应满足的条件:
偏心轮与工件间的摩擦系数常取μ1=0.1~0.15 ψ1——偏心轮与工件间的摩擦角。
圆偏心轮保证自锁的结构条件:
定心夹紧机构的自动定心原理是什么?
答:它是利用夹紧元件的等速移动或均匀弹性变形,使工 件中心线或对称面不产生位 移,实现定心夹紧作用。它通 过中间递力机构,如螺旋、 斜楔、 杠杆等 使夹紧元件等速 移动,实现定心夹紧作用。
工件在夹具中的加工误差及夹具误差估算

在下图(a)所示工件上铣缺口,加工尺寸为 A和B。下图(b)所示为加工示意图,加工尺寸A 的工序基准是F面,定位基准是E面,两者不重合。 刀具相对于夹具的对刀尺寸C,在加工过程中是 不变的。由于一批工件中尺寸S的公差δS 使F面(工序基 准)的位置在一定 范围内变动,从而 使加工尺寸A产生 误差,这个误差就 是基准不重合误差。
基准不重合误差为:
B Amax Amin Smax Smin S
S是定位基准和工序基准间的距离尺寸,称为定 位尺寸。当工序基准的变动方向与加工尺寸的方向相 同时,基准不重合误差等于定位尺寸的公差,即
B S
当工序基准的变动方向与加工尺寸方向不同,其 夹角为α时,基准不重合误差为:
B S cos
② 基准位移误差 当工序基准与定位基准相同时,由于定位副
的制造误差和最小间隙配合引起定位基准位置变 动,从而造成的加工误差,称为基准位移误差, 用ΔY表示。
如下图所示,工件以圆柱孔在芯轴上定位,在圆 柱面上铣键槽,加工尺寸为A和B。
加工尺寸A的定位基准和工序基准都是内孔
轴线,两者重合,基准不重合误差ΔB=0。但由 于工件内孔和芯轴有制造误差和最小配合间隙,
一般来说,用试切法加工工件时,不会引起 定位误差,但是用调整法加工工件时,则会引起 定位误差。
(1)定位误差的产生原因
工件在夹具中定位时,造成定位误差的原因 有两个:基准不重合误差和基准位移误差。
① 基准不重合误差 基准不重合误差是指由于工件的工序基准和定位
基准不重合而造成的加工误差,用ΔB表示。
2.夹紧误差ΔJ
夹紧误差ΔJ是指工件在夹紧变形时产生的误差, 其大小是工件基准面至刀具调整面之间距离的最大 与最小尺寸之差。
它包括工件在夹紧力作用下的弹性变形、夹紧 时工件发生的位移量或偏转量、工件定位面与夹具 支承面之间的接触部分的变形等。当夹紧力方向、 作用点和大小合理时,夹紧误差近似为零。
工件在夹具中的定位与夹紧

1)选择不加工面为粗基准 2)合理分配加工余量的原则 3)便于工件装夹原则 4)同方向上粗基准不得重复使用
(3)精基准的选择
主要应保证加工精度和装夹方便
选择精基准一般应遵循以下原则:
1)基准重合原则
设计(工序)与定位
2)基准统一原则
各工序的基准相同
3)互为基准原则
两表面位置精度高
4)自为基准原则
加工余量小而均匀
考虑定位方案时,先分析必须消除哪些自由度, 再以相应定位点去限制。
(3)欠定位与过定位
工件应限制的自由度未被限制的定位,为欠定位, 在实际生产中是绝对不允许的。
工件一个自由度被两个或以上支承点重复限制的 定位称为过定位或重复定位。一般来说也是不合 理的。
过定位造成的后果: (1)使工件或夹具元件变形,引起加工误差; (2)使部分工件不能安装,产生定位干涉(如一面两销)
六点定位原理。
实际中一个定位元件可体现一个或多个支承点, 视具体工作方式及其与工件接触范围大小而定
定位与夹紧的区别: 定位是使工件占有一个正 确的位置,夹紧是使工件保持这个正确位置。
(2)完全定位与不完全定位 工件的六个自由度被完全限制的定位称完全定位, 允许少于六点的定位称为不完全定位。 都是合理的定位方式。
(2)夹紧力作用点的确定 1)夹紧力应作用在刚度较好部位
2)夹紧力作用点应正对支承元件或位于支承元件
形成的支承面内
3)夹紧力作用点应尽可能靠近加工表面
(3)夹紧力大小的估算
夹紧力的大小根据切削力、工件重力的 大小、方向和相互位置关系具体计算,并 乘以安全系数K ,一般精加工K =1.5~2, 粗加工K = 2.5~3。
向上的变动量。由工件定位面和夹具定位元件的制造误差 以及两者之间的间隙所引起。
(3)精基准的选择
主要应保证加工精度和装夹方便
选择精基准一般应遵循以下原则:
1)基准重合原则
设计(工序)与定位
2)基准统一原则
各工序的基准相同
3)互为基准原则
两表面位置精度高
4)自为基准原则
加工余量小而均匀
考虑定位方案时,先分析必须消除哪些自由度, 再以相应定位点去限制。
(3)欠定位与过定位
工件应限制的自由度未被限制的定位,为欠定位, 在实际生产中是绝对不允许的。
工件一个自由度被两个或以上支承点重复限制的 定位称为过定位或重复定位。一般来说也是不合 理的。
过定位造成的后果: (1)使工件或夹具元件变形,引起加工误差; (2)使部分工件不能安装,产生定位干涉(如一面两销)
六点定位原理。
实际中一个定位元件可体现一个或多个支承点, 视具体工作方式及其与工件接触范围大小而定
定位与夹紧的区别: 定位是使工件占有一个正 确的位置,夹紧是使工件保持这个正确位置。
(2)完全定位与不完全定位 工件的六个自由度被完全限制的定位称完全定位, 允许少于六点的定位称为不完全定位。 都是合理的定位方式。
(2)夹紧力作用点的确定 1)夹紧力应作用在刚度较好部位
2)夹紧力作用点应正对支承元件或位于支承元件
形成的支承面内
3)夹紧力作用点应尽可能靠近加工表面
(3)夹紧力大小的估算
夹紧力的大小根据切削力、工件重力的 大小、方向和相互位置关系具体计算,并 乘以安全系数K ,一般精加工K =1.5~2, 粗加工K = 2.5~3。
向上的变动量。由工件定位面和夹具定位元件的制造误差 以及两者之间的间隙所引起。