液压平板车坡道及空障通过性能的研究 田承泰
提高液压千斤顶地震救援效率的创新设计

( )在 比较窄 的空 间下 , 1 千斤顶 放不进去 ;
( )千斤 顶 的手柄施 展不 开 ; 2
为 了减 少液压 救援 装备体 积 , 高总顶力 , 提 可采 用
如下 措施 :
( )千斤 顶放 进去 了 , 滑找不 到支点 ; 3 打
( )千斤 顶 ] 到 支 点 了 , 受 力 集 中 , 4 找 但 因害 怕 将 整块墙 壁顶 裂 , 不敢使 用 千斤顶 ; 而 ( )顶力 不够 。 5 3 地震 救援 液压千 斤顶 的设计 思维 创新 针对 上述 缺点 , 我们 可将设 计思 维创新 , 设计 一种 分 离式 、 单作 用 、 接头地 震救 援液压 千斤顶 : 球
2 背景 技术
连接 可用螺 纹 , 可用 可动但 不分离 的配合 ; 亦
( )顶 板采 用方 型块 用 圆柱 销组 装 般 液压 千斤顶 为 了携带 方便 , 用泵 、 、 采 阀 缸 【 一体化 结 构 , 野外 作业 , 汽 车 更 换 轮 胎 时 很 1 J 当 如 方 便 , 是 当地震 时 , 但 如这 次汶 川大地 震 , 倒塌 , 房屋 人 被 压在倒 伏 的断壁 下 , 况 复杂 , 间狭 小 , 情 空 出现很 多
efce c o a t q a e r l fo e a in fii n y f r e r u k e i p r t s h e o
XU e g b o.DU h ng q a g Zh n — a S e — in
( 江苏联合职业技术学院 淮安生物工程分院 , 江苏 淮安
液 压 与 气动
21 第 1 0 0年 O期
提 高液 压 千斤 顶 地震 救 援 效 率 的创 新 设计
徐 正 保 , 盛 强 杜
电子科技大学田书林教授团队喜获国家技术发明二等奖
短讯 1 :电子科 技大 学 田书林 教授 团 队喜 获 国家技 术 发 明二 等 奖
电子科技大学“ 宽带复杂信号实时捕获与合成技术” 荣获 国家技术发明二等奖。该项 目针对信号实时 捕获 与合 成技 术 中的高采 样率 、高捕 获率 、高 精度 同步 等技术 难题 ,发 明 了非均 匀校 正 的大规 模并 行采 样
足 了我 国深 空探 测等 领域 的科研 急需 。 《 实验科 学与技 术》 编 辑部
第1 2卷 第 1 期
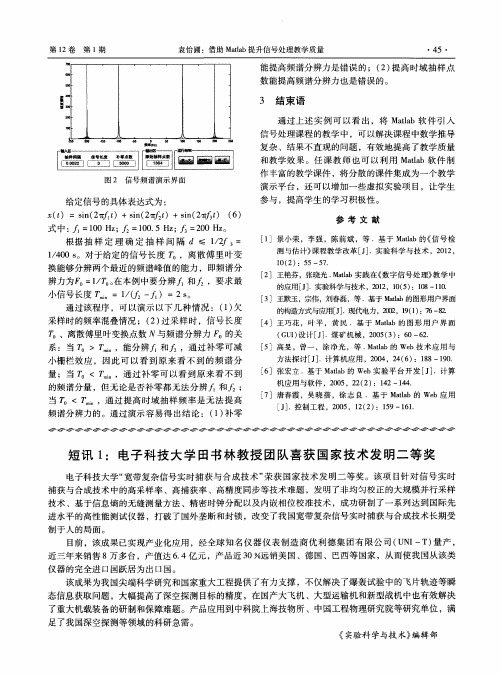
袁怡 圃 :借助 M a t l a b提升信号处理教学质量
t
・ 4 5・
能 提高频 谱分 辨力 是错 误 的 ;( 2 ) 提 高时 域抽 样 点 数 能提 高频谱 分辨 力也 是错误 的 。
3 结束语
通过 上 述 实 例 可 以看 出 ,将 Ma t l a b软 件 引 入
[ 4 ]王巧花 ,叶平 ,黄 民 .基 于 Ma t l a b的图 形用 户 界 面
采样时的频率混叠情况 ;( 2 ) 过采样时,信号长度 离散傅 里 叶变换 点数 Ⅳ与频 谱分 辨 力 的关
、
( G U I ) 设计 [ J ] .煤矿机械 ,2 0 0 5 ( 3 ) :6 0— 6 2 . [ 5 ]高曼 ,曾一 ,涂净光 ,等 . Ma t l a b的 We b技术 应用 与 方法探讨 [ J ] .计算机应用 ,2 0 0 4 ,2 4 ( 6 ) :1 8 8—1 9 0 .
通过该 程 序 ,可 以演 示 以下 几 种情 况 :( 1 ) 欠
[ 2 ]王艳芬 ,张晓光 . M a t l a b实践在《 数字信 号处 理》 教学 中
盘式液压推杆制动器在带式输送机上的应用
() 加巷道支护关键是 安全性 。克服 了人 工升 、 1增
降棚梁时 的重 量问题 , 有效 防止 了棚梁 歪斜 、 偏肩 、 滑 梁等现象的发生 , 不仅提高了工程质量 , 而且保证 了巷
道支护的安全 。
.
l
l
I
l
I
l
。 ’。 。T ‘。 ‘
● ●
2 方 案 实 施
对旋 转部件 , 量不平 衡 , 质 就将 产生离 心力 , 根据 牛 顿 定律, 离心力 F:/ , ?or其大小 与旋 转速度的平方成正 / z 比, 速器高速轴 转速 高 , 减 即使 不平衡 的质 量不 大 , 也 会产生 很大 的离心力 。 由于离 心力 的存 在 , 减速 器输 入轴和 电动机 轴就要 产生 附加弯 矩 , 它们 的受力 状 态 由设计 的只承 受纯扭 矩变 为 同时承受 弯矩 和扭矩 , 其 后果 , 轻则产生 震动 、 速器 因密封 圈磨 损而漏 油 , 减 严 重时会 造成减速器高速轴 和电动机轴断裂 。
摘
要
针对传统皮带机轮式电液推杆制 动器 的优缺点 , 兖矿集 团有 限公 司北宿煤矿 采用盘 式液压 推杆制动器代 替原有 轮式制动器 , 有很 具
盘式液压推杆制动器 文献标识码 B
好的推广价值。 关键词 带式输送机 中图分类号 T 5 8 1 D 2 .
《 矿安全规程 》 三百 七十三条规 定 , 煤 第 倾斜 井巷 中使用 的带式输送机 , 上运时 , 必须 同时装设 防逆转装 置和制动装置 ; 下运时 , 必须装设制 动装 置。通常情 况 下小型或通用 型的上运皮带机都采用轮式 电液推杆 制 动器 , 这种方式将制动器布置在减速器 的高 速轴上 , 优 点是结 构简单 、 所需制动力矩小 、 节省空 间。但 由于制
松软地面机械仿生理论与技术_任露泉

2000年1月农业机械学报第31卷第1期松软地面机械仿生理论与技术任露泉 佟 金 李建桥 陈秉聪 【摘要】 生物经过长期与自然环境进行物质、能量及信息交换,造就了适应生态环境的生物系统和生存本领,许多科学技术难题在生物界已经获得圆满解决。
现代测试技术和测试仪器的出现使得对生物结构、生物功能和生命过程的认识得到了惊人的进展,这为其他学科的研究及发展注入了新的活力,提供了全新的科学原理和技术方法。
在工程科学领域中融入生物科学原理和方法进行生物科学与工程科学渗透交融的工程仿生学研究获得了长足的发展,生物科学、机械工程学与松软地面力学相互交叉形成的松软地面机械仿生学成为工程仿生学的重要内容。
为解决地面机械在松软地面上工作或行驶过程存在的土壤粘附严重和通过性差两大技术难题,我国学者开展了以生物脱附原理及其仿生技术、仿生步行轮及仿生步行轮式气垫车和骆驼越沙机理及仿生轮胎为代表的松软地面机械仿生学的研究,本文对此进行了综合介绍。
叙词:仿生学 地面机械 松软地面 土壤动物 骆驼 粘附 步行轮 气垫车 轮胎中图分类号:U416.2 文献标识码:ABiomimetics of Machinery for Soft TerrainRen Luquan T ong Jin Li Jianqiao Chen Bing cong(J ilin Univ ersity of T echnology)AbstractExchanges betw een liv ing beings(including animals and plants)and natural surrounding s in matter,energ y and inform ation have r esulted in their biolog ical system s and living abilities to adapt them selves to nature ov er millions upo n m illio ns of years.Many problem s in science and technolo gy hav e been satisfactor ily settled in liv ing being s.Developm ents o f m odern testing tech-niques and analy zing instruments hav e made sur prising pro gress in understanding constitutions and functions of living beings and the biolog ical pheno mena as w ell,w hich creates new important co ntents and provides new scientific theo rem s and technical m ethods for researching and dev elo p-ing in o ther branches of science.Engineering biomimetics has been developed,co nsiderably, since biolo gical pr inciples and m ethods are merg ed in engineering fields.Biom imetics of m achin-er y for soft terrain fo rmed by interdiscipline of biolo gy,mechanical eng ineer ing and terr am echan-ics has becom e an important content of engineering biomimetics.In order to develop theo ries and metho ds to reduce soil adhesion against terr ain machines and to improv e the passing ability o f ve-hicle on soft terrain,corresponding biom imetics r esearches have been carr ied out by researchers, fo r ex am ples,anti-adhesio n principles,biomim etic anti-adhesion techniques,biomim etic walking w heels,air cushion vehicle w ith biomimetic w alking w heels,interactio n betw een camel foo t and sand,and biomimetic tire.T he r esearches and dev elo pm ents on this field w ere r eview ed in this paper.Key words Bio mimetics,T err ain machine,Soft ter rain,Soil animal,Camel,Adhesion, Walking w heel,Air cushio n vehicle,T ire 收稿日期:19991112*国家自然科学基金资助(重点)项目(项目编号:59235090,59835200)任露泉 吉林工业大学地面机械仿生技术部门开放研究实验室 教授 博士导师,130025 长春市佟 金 吉林工业大学地面机械仿生技术部门开放研究实验室 教授 博士导师李建桥 吉林工业大学地面机械仿生技术部门开放研究实验室 教授 博士导师陈秉聪 吉林工业大学地面机械仿生技术部门开放研究实验室 教授 博士导师 中国工程院院士 引言20世纪科学技术的飞速发展给人类带来了现代文明,然而这些多以破坏人类赖以生存的生态环境、消耗大量不可再生资源为代价。
甘竹溪特大桥主塔液压自爬模体系简介
横桥 向宽度 : 横梁 以上等宽 4r , 横梁 以下到离承 台 5 高位 置 n 0c m
从 4m 变 化 至 8m, 塔 柱 承 台 顶 以 上 的 5 l 部 分 为 直 径 8I 下 0e_ ' D I T 的圆 形 截 面 。桥 面 以上 塔 柱 施 工 时 采 用 Z -P 10型 液 压 自爬 LZ M 0 模 体 系 施 工 , 工 时 6m 一 节段 。 施
・
29 ・ 8
第3 6卷 第 6期 20 10年 2月
山 西 建 筑
S HANXI ARCHI TE rURE
V0. 6 No 6 13 . Fe 20 0 b. 1
文 章编 号 :0 96 2 {0 0 0 —2 80 10 .8 5 2 1 )60 9 —2
2 爬 模主 要性 能指标
2 1 名 称 型 号 .
Z -P 0 L Z M10型液 压 自爬 模 。
2 2 架体 系统 .
架体支承跨 度 : 6m( ≤ 相邻 埋 件 点 之 间距 离 ) 架 体高 度 : ;
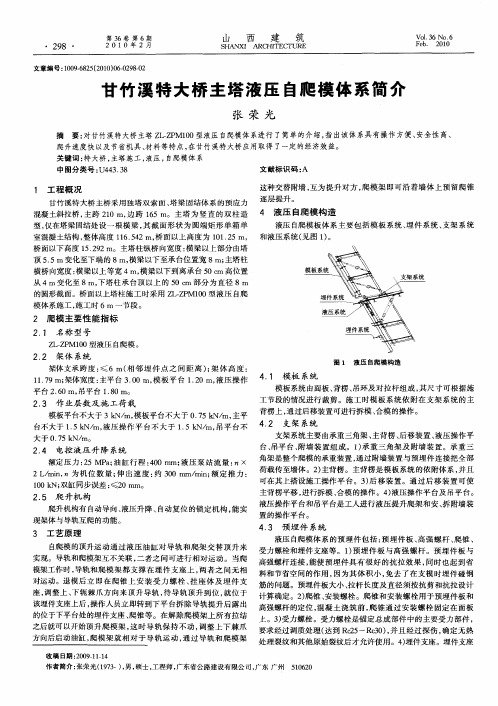
图1
液 压 自 爬模 构 造
. 1 .9m; 17 架体宽度 : 主平 台 3 0 模板 平 台 1 2 液 压操作 4 1 模 板 系统 .0m, . 0m, 模 板系统 由面板 、 背楞 、 吊环及 对拉杆组 成 , 尺寸可根 据施 其 平 台 26 I吊 平 台 1 8 I .0I , T .01。 T
甘 竹 溪 特 大桥 主 塔 液压 自爬 模 体 系简 介
张 荣 光
摘 要: 对甘竹溪特大桥 主塔 Z -P 0 LZ M1 0型液压 自爬模体系进行 了简单 的介 绍, 出该体 系具有操 作方便 、 指 安全 性高、
刘景泰教授个人简介
刘景泰教授个人简介一、基本信息刘景泰教授,博士生导师,现任南开大学机器人与信息自动化研究所副所长,曾任国家863计划智能机器人主题工业机器人专业专家组成员。
共济专1979年9月入天津大学自动化系。
1983年获天津大学工学学士学位,专业方向是自动化;1986年获天津大学工学硕士学位,研究方向是微机控制系统;1998年获南开大学工学博士学位,研究方向是机器人学。
336 26038ka1986年开始一直在南开大学工作,分别在1988年、1991年和1998年被南开大学聘为讲师、破格聘为副教授和教授。
1997年遴选为国家863计划智能机器人主题工业机器人专业专家组成员。
正门对面业刘景泰1986年来到南开大学后,便很快投身863科研项目,长期安心于科研、教学工作。
对学生尽心尽责,对本职工作有强烈的事业心和责任感。
在多项“863”科研项目中起了关键作用,协助卢桂章教授创建了南开大学机器人研究室,并发展为863计划机器人主题开放实验室,使南开大学成为我国进行机器人高科技研究的基地之一。
021-共刘景泰教授曾担任863计划机器人主题工业机器人专题专家组成员,在国内机器人研究的学者中也具有一定影响。
2001年,刘景泰教授获得了863计划15周年贡献奖。
经过十几年有意识的艰苦努力,目前已经形成以卢桂章教授为核心的,以中青年教师为主体的研究群体,这样的群体在南开大学非常有优势。
在研究方面,南开大学机器人所同样取得了优异成绩,无论在人均科研经费数,还是在人均科研成果数,均处于国内相关学科的领先水平。
在面向生物医学工程的微操作机器人系统、基于远程网络的机器人遥操作、多机器人系统及其协调控制、用于MEMS快速原型设计的虚拟现实系统等方面取得了国内领先的研究成果。
近年来,获得国家攻关项目、863计划、攀登计划、国家自然科学基金项目20余项,累计科研经费超过500万元。
获天津市攻关,青年基金资助多项,总金额数十万元。
业济在教学方面,刘景泰近些年一直主讲研究生的《机器人学》,每年60学时。
静态推靠式旋转导向系统三支撑掌偏置机构控制方案

万方数据
杜建生等:静态推靠式旋转导向系统三支撑掌偏置机构控制方案
7
4。3个分力E、疋、尼在x-y平面内均布。
易K R如 陬
耍刁凡一
习 笙一B 1
E
F
Fig.4
图4平面三力汇交力系合力计算 Mathematical solution of the force vector resultant
合力F的幅值及其方向为
to hole wall without force.At last,the control arithmetic is presented for the static push-the—bit rotary steerable t001.The block diagram
can supply theory basis for some domestic researchers who study this kind ofbias unit.
Key words:push·-the··bit rotary steerable system;static bias device;three pads;control scheme
静态推靠式旋转导向系统是BakerHughes石油 技术服务公司于20世纪末最先研发并成功应于商 业化的导向工具,该T具专门针对复杂的3D井、超 深保直井、难以开采的小型边缘断块油气田以及大
sinoo+F2
sin(240。+/90)
l
E cosoo+E cos(1200+Oo)+巧cos(240。+Oo)
(2) 将式(2)代入式(1),简化得
IF(鼻,E,r0=√E2+E2+E2一EE—E巧一EE
1tanQ:生!坐鱼±墨!垫!!!笠±鱼!±刍!!里!!!!:±鱼!
山推“十一五”国家科技支撑计划“新一代高性能全液压推土机研制项目”四项课题通过验收

近 期 ,山东科 技 部 门受 国家 科 技 部 门委 承 担 的 “ 一 代 高性 能 全 液 压 推 土 机 研 制 新 对 托 在 山 推 召开 了山 推 “ 一五 ”国 家科 技 支 项 目”四项 课 题 通 过 验 收 , 课 题 成果 给 予 十 撑 计 划 “ 一代 高性 能全 液 压推 土机 研 制项 了较 高 收会 , 课 题 成 果 给 予 了较 高评 司通 过 “ 一 代高 性能 全 液压 推 土机 研制 项 对 新
等关 键 技 术 进 行 了深入 的 研 究,掌握 了高性
山东大学 等单位 的领导、 专家共2 余人参加 了 能 全 液压 推 土机 研 制 的各项 关 键 技 术 , 0 开发
本次验 收会。 完成 的S 0 全 液 压推 土机 经 省级 鉴定 , DlYE
验 收会 上 , 报 了山推 承担 国家科 技 支 其 技 术性 能 达 到 国 际先 进 水平 。 定 了 全 汇 制
对 静 价。山东科 技 部 门、 国工程 机 械协 会 、 中 济宁 目”的 实 施 , 整 机 匹配 、 液 压 传 动 系统
科 技 单位 、湖北 大信 会 计 师 事 务 所 、 家 质 匹 配 、 国 电气 智能 化 控制 和 低排 放 发 动机 应 用
量监 督检验 中心、 江大 学、 浙 西安交 通大 学、
撑计 划 项 目的具 体 实施 情况 及开发 完成 的全 液 压 履带 式 推 土 机 技 术 条 件 , 成 了具 有 形
液压推土机产品的技术性能, 并对山推今年 自主知 识 产权 的 核 心 技 术 , 成了任 务 书 规 完
的生 产 经 营 情 况 以及 未 来 发 展 的 目标 也 作 定 的 各项 研 究 内容和 考核 指 标 , 分指 标 超 部 了简要 介 绍 。四项 课 题 负责 人详 细 汇 报 了课 过 预定 目标 。 题 执 行 情况 和 财务 自评 价报 告 。 收组 进行 验 山推 将 以此 次验 收 会 为新 的 起 点 , 取 争
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
液压平板车坡道及空障通过性能的研究田承泰
发表时间:2018-01-02T16:46:34.250Z 来源:《基层建设》2017年第28期作者:田承泰王健
[导读] 摘要:大件运输货物相对于其他货物来说,有着超长、超宽、超高、超重的特性,此类货物通常使用液压平板车来运输。
中国外运大件物流有限公司山东分公司山东 250306
摘要:大件运输货物相对于其他货物来说,有着超长、超宽、超高、超重的特性,此类货物通常使用液压平板车来运输。
液压平板车能否顺利地到达目的地,其安全性、时效性至关重要。
其运输通道的选择、道路技术标准的限制等问题很大程度上决定着大件运输能否顺利进行。
本文主要对液压平板车的坡道通过性及空障通过性进行研究。
关键词:大件运输液压平板车通道选择坡道通过性空障通过性
除去少数的专用公路和大件运输公路外,我国的公路都是依据设计车型通行能力并考虑一定安全距离的情况下来设计。
为保证大件运输车组顺利通过,必须通过校核后改进公路通过性或改变车组的通过性来适应公路的通行条件。
本文主要对大件运输车辆的坡道通过性能及空障通过性进行研究。
一、坡度通过性
由于平板车升降结构的不同,平板车液压悬挂的升降幅度也有着相应的限制。
当平板车通过坡道时通过能力就会受到限制。
坡道曲率半径较大的时平板车将会出现悬挂行程不够的情况,导致平板车两端或者中间悬挂悬空。
因此就需要通过校核来判断坡道的通过性。
通常道路坡道主要为两种形式:一种为圆弧形式的坡道;一种为折角形式的坡道。
(一)弧形坡道通过能力
弧形坡道分为凸形和凹形两种。
下面对这两种情况下平板车的通过性进行计算。
如图1所示,图中近似认为平板车主梁为一直线,各字母代表意义如下:
L——挂车第一轴与最后一轴的距离;
h——挂车悬挂伸缩量;
平板车行程已经达到极限,平板车无法通过该圆弧弯道。
此种情况下通常可以通过道路整修(增大R测)或者减少车辆轴数(减小Rmax)的办法通过校核。
(二)折角形式坡道通过能力
当车辆通过折角形式道路的坡道,将会在坡底或者坡顶存在两个极限位置,此两种极限情况的平板车通过图如图2所示:
实际道路勘察时可以通过对比折角坡道的实际道路折角α测和平板车可以通过的最大道路折角αmax值的大小来判断平板车的通过性。
当α测<αmax时,平板车可以通过该折角弯道;当α测≥αmax时,平板车悬挂行程已经达到极限无法通过该折角弯道。
此种情况下通常可以通过道路整修(减小α测)或者减少车辆轴数(增大αmax)的办法通过校核。
(三)路面不平的通过能力
实际运输过程中除了(一)、(二)两个小结提到的弧形坡道和折角形式坡道,还会遇到一些道路竖向不平的路面。
路面不平通常分为两种,路面驼峰和路面低洼。
由于这两种路面不平的状态通常都是在较短路面的路面起伏。
图3所示,路面上车长范围内第一轴与最后一轴轮胎所在平面为a,路面驼峰高点或者路面低洼最低点所在的与a平行的平面为b,两平面间距为h。
实际道路勘察可测得a平面和b平面的间距h,通过对比h与平板车最大行程H的值来校核不平路面的通过性。
当h<H时,平板车可顺利通过该不平路面;当h≥H时平板车无法正常通过该不平路面,需要通过路整修(减小h)办法通过校核。
通过以上针对各种坡道通过性能的校核就可以判断液压平板车能否顺利通过坡道。
集合结果为无法通过时,就需要改变平板车编组或者通过对道路进行改造才能让液压平板车顺利通过坡道。
二、空障通过性
空障主要有主动手段和被动措施来确保通过。
主动手段就是通过降低车板高度、旋转货物等来降低车组总体运行高度;被动措施就是临时对公路空间进行改造,通过顶升、下挖、移除等措施扩大通行空间。
在此说的通过性也是指在一定排障条件下的道路通过性,本章节中校核通过性是在简易排障情况下的道路通过性。
在公路运输过程中遇到的空中障碍主要有两种:硬性空障和柔性空障。
(一)硬性空障的通过性
跨越性硬性空障:硬性空障中管道、管廊、水渠、立交桥等属于平面型空障,判断此类空障的通过性,需要提前测量空障的净空高度。
在此以立交桥为例介绍一下通过性的判断。
正常在测量桥梁净空高度时选择视觉上看上去的最低点测量即可。
但是按照公路设计标准路面及桥面均存在一定的坡度,所以桥下不同位置的净高存在一定差异。
所以当测量同一路线中较矮的桥梁时为了获得最大的通过高度就
需要详细多测量几组数据。
如图4 a)所示要在桥梁顺行方向1、2、3处测试3个净空高度h1、h2、h3,这个工作需要在a、b、c三处进行测量(如图4 b)所示)共计可得到9个高度数据。
绝大多数大件运输车是可以升降的,当车组通过较矮的桥梁时会降低车板高度,待车组通过桥梁后再恢复车辆正常行驶高度。
因此在判断通过性的时候是以车板允许行驶条件下的车组高度与桥梁净空高度值对比来校核桥梁的通过性。
还有一种比较特殊硬性空障为隧道,常见的隧道顶面为圆弧形式,其圆弧顶面下面通常会有通风机、标志牌等障碍物。
判断隧道的通过性需要车辆测量获得以下数据 H——隧道狐顶高度:
h——隧道内障碍物距离地面高度: d——隧道内障碍物内档间距。
(二)柔性空障的通过性
大件运输车组在公路运输中遇到的柔性空障主要可以分为两种:一种为低压电力线和通信线;一种为高压电力线。
两种类型的柔性空障的测量及排障也存在不同。
低压电力线和通信线:当低压电力线和通信线高度不满足车辆通行的时候,通常可以采用临时挑高的方式来进行排障。
测量此类空障
高度需要测量线缆的最低高度h及线缆支撑杆的高度H(如图8)。
通过计算可以近似得到线缆挑高后的极限高度:
当车组行驶高度小于低压电缆、通信线高度hmax时,不排障或者进过简单人工或者机械挑高线缆的方式通过线缆。
当车组行驶高度大于hmax时,已经不能通过简单的挑高通过,需要联系相关不能拆除道路两侧线杆上的固定措施挑高或者将线缆落地后采取保护措施通过。
高压线:路线勘察过程中测量高压线时,不仅要测量车辆通过区域高压线的高度还要记录要高压线的电压等级。
判断通过性的时候要
利用高压线高度减掉对应等级的安全距离所得到的允许通行高度与车组行驶高度对比。
车辆(包括装载物)外廓至无遮栏带电部分之间的
安全距离详见表2车辆(包括装载物)外廓至无遮栏带电部分之间的。
当车辆行驶高度小于高压线允许通行高度时,该高压线时可以通过的,车辆行驶至此区域的时候要降低车板缓慢通过;当车辆行驶高速大于高压线允许通行高度时,车组通过该高压线是非常危险的,通过时必须协调当地电力部门停电后通行,必要时需要停电挑高后通行。
参考文献:
[1] 刘浩学.《道路交通安全工程》. 人民交通出版社,2013.
[2] 余志生.《汽车理论》机械工业出版社. 2006
[3] 曾传华.林兰刚《公路大件运输基础》. 中国铁道出版社,2014.。