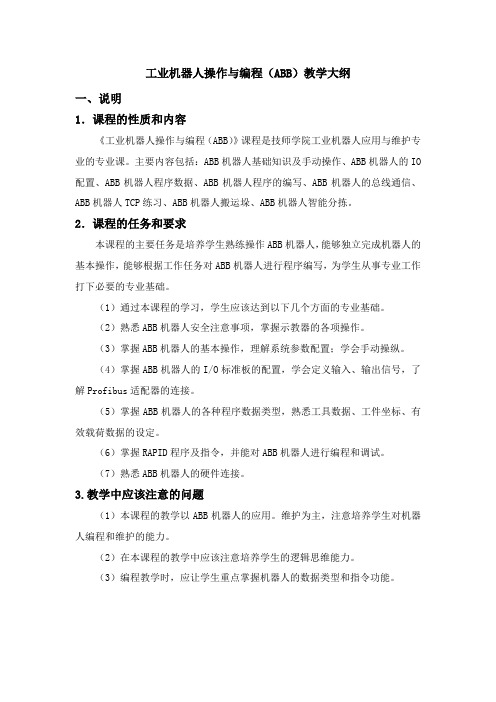
ABB工业机器人编程-第二章
工业机器人操作与编程(ABB)教学大纲
工业机器人操作与编程(ABB)教学大纲一、说明1.课程的性质和内容《工业机器人操作与编程(ABB)》课程是技师学院工业机器人应用与维护专业的专业课。
主要内容包括:ABB机器人基础知识及手动操作、ABB机器人的IO 配置、ABB机器人程序数据、ABB机器人程序的编写、ABB机器人的总线通信、ABB机器人TCP练习、ABB机器人搬运垛、ABB机器人智能分拣。
2.课程的任务和要求本课程的主要任务是培养学生熟练操作ABB机器人,能够独立完成机器人的基本操作,能够根据工作任务对ABB机器人进行程序编写,为学生从事专业工作打下必要的专业基础。
(1)通过本课程的学习,学生应该达到以下几个方面的专业基础。
(2)熟悉ABB机器人安全注意事项,掌握示教器的各项操作。
(3)掌握ABB机器人的基本操作,理解系统参数配置;学会手动操纵。
(4)掌握ABB机器人的I/O标准板的配置,学会定义输入、输出信号,了解Profibus适配器的连接。
(5)掌握ABB机器人的各种程序数据类型,熟悉工具数据、工件坐标、有效载荷数据的设定。
(6)掌握RAPID程序及指令,并能对ABB机器人进行编程和调试。
(7)熟悉ABB机器人的硬件连接。
3.教学中应该注意的问题(1)本课程的教学以ABB机器人的应用。
维护为主,注意培养学生对机器人编程和维护的能力。
(2)在本课程的教学中应该注意培养学生的逻辑思维能力。
(3)编程教学时,应让学生重点掌握机器人的数据类型和指令功能。
二、学时分配表三、课程内容及要求项目一 ABB机器人基础知识及手动操作教学要求1.了解工业机器人的发展及机器人安全注意事项。
2.掌握ABB机器人示教器的使用3.掌握示教器上基本的功能操作。
教学内容任务一工业机器人的概述和安全注意事项任务二认识示教器——配置必要的操作环境任务三ABB机器人事件信息查询及数据备份与恢复任务四ABB机器人的手动操纵任务五ABB机器人的转数计数器更新操作教学建议本项目的主要教学目标是激发学生对工业机器人学习的兴趣。
ABB工业机器人编程基础操作
▪
ISignalDI di1, 1 , intno1;
▪
ENDPROC
▪
TRAP tMonitorDI1
▪
MoveJ Offs(p10,200,0,0), v1000, fine, tool1 \WObj:=wobj1;
▪
MoveC Offs(p10,0,200,0), Offs(p10,-200,0,0), v1000 , z10,
常量赋值:reg1:=17; 数学表达式赋值:reg2:=reg1+8;
H
5
添加常量赋值指令的操作如下
H
6
H
7
H
8
H
9
(2)添加带数学表达式的赋值指令的操作
H
10
H
11
H
12
H
13
H
14
5.2.2工业机器人常用运动指令
工业机器人在空间中常用运动指令主要有关节运动(MoveJ)、 线性运动(MoveL)、圆弧运动(MoveC)和绝对位置运动MoveAbsJ) 四种方式。
现以传感器的信号进行实时监控为例编写一个中断程序: 1、在正常情况下,di1的信号为0. 2、如果di1的信号从0变成1,就对reg1数据进行加1的操作。 操作步骤如下:
H
67
H
68
H
69
H
70
H
71
H
72
H
73
H
74
H
75
H
76
程序举例
▪ 程序开始运行时,机器人末端工具以500mm/s 的速度移至phome点位置待机;
H
32
当di1=1时,执行RETURN指令,程序指针返回到调用
工业机器人离线编程(ABB)2-1 安装RobotStudio
二、实践操作
1、下载RobotStudio • 本课程所用软件版本为RobotStudio6.01,课程中的案例在6.01以下版本
中可能无法正常打开或使用,请及时更新软件。
二、实践操作
2、安装RobotStudio
二、实践操作
2、安装RobotStudio
二、实践操作
2、安装RobotStudio
2-1 安装工业机器人离线编程仿真软件 RobotStudio
一、工作任务
• 1、学会下载RobotStudio。 • 2、学会RobotStudio的正确安装。
二、实践操作
1、下载RobotStudio • 本课程所用软件版本为RobotStudio6.01,课程中的案例在6.01以下版本
中可能无法正常打开或使用,请及时更新软件。
接虚拟控制器这样的问题,所以建议关闭防火墙或对防火墙的参数进行恰 当的设定。
Байду номын сангаас
三、总结
为了确保RobotStudio能够正确的安装,请注意以下的事项: • 1、计算机的系统配置建议如下:
硬件 CPU 内存 硬盘 显卡
操作系统
要求 i5或以上 2G或以上 空闲20G以上 独立显卡
WIN7或以上
三、总结
为了确保RobotStudio能够正确的安装,请注意以下的事项: • 2、操作系统中的防火墙可能会造成RobotStudio的不正常运行,如无法连
ABB工业机器人编程与操作 项目二 工业机器人的基本操作

(二) 工业机器人的手动操作
单轴运动的手动操作
线性运动的手动操作
重定位运动的手动操作
转数计数器的更新 建立基本RAPID程序
三
实践操作-工业机器人的手动操作
1.单轴运动的手动操作
ABB 六 关 节 工 业 机 器 人 是 由
六个伺服电动机分别驱动机器人
的六个关节轴,那么每次手动操
三
作一个关节轴的运动,就称之为
单轴运动。
三
实践操作-工业机器人的手动操作
电源总开关
急停开关 通电/复位 机器人状态
1)接通电源,将机器人状态钥匙 切换到中间的手动位置。 2)在状态栏中,确认机器人的状 态已经切换到手动状态。在主菜单 中选择“手动操纵”。 3)单击“动作模式”。 4)选择“轴1-3”,单击“确定”。
三
实践操作-工业机器人的手动操作
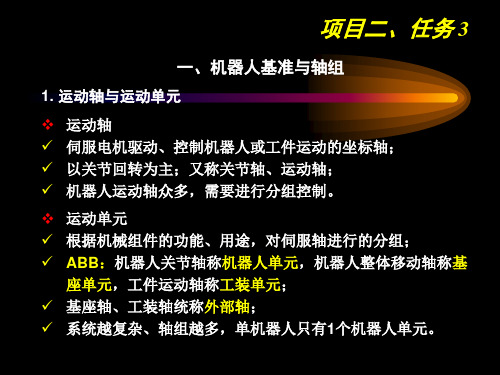
二
工作任务
(一) 工作任务的背景
随着机器人技术的发展,工业机器人已成为制造业的重要组成部分。机器人显著地提 高了生产效率,改善了产品质量,对改善劳动条件和产品的快速更新换代起着十分重要 的作用,加快了实现工业生产机械化和自动化的步伐。对初学者来说,手动操作机器人 是学习工业机器人的基础。本任务主要学习单轴运动、线性运动、重定位运动、更新转 数计数器和建立基本RAPID程序的手动操作方法。
1)单击主菜单中的“手动操纵”,然后单击“动作模 式”。
2)选择“重定位”,单击“确定”。
三
实践操作-工业机器人的手动操作
3)单击“坐标系”。 4)选择“工具”,单击“确定”。 5)按下使能按钮,进入电动机开启 状态,并在状态栏中确认。 6)操作示教器的操作杆,使机器人 绕着工具TCP点做姿态调整的运动,操 作杆方向栏中的X、Y、Z的箭头方向代 表各个坐标轴运动的正方向。
ABB工业机器人编程与操作 (2)
面)。
α>0°
正肘
反肘
α<0°
❖ 手腕俯/仰 ✓ 用来描述腕摆动J5(B)轴状态; ✓ 基准线:上臂中心线; ✓ 手回转中心线与基准线夹角β>0°为仰, β<0为俯,
β=0°为腕奇点(J4和J6中心线重合)。
☞ 关节坐标原点及方向( ★ 基准:基座坐标系 ):
腰回转轴J1(S);以+Z轴为基准、右手定则确定方 向;上臂中心线平行+XZ平面的位置为0°。
下臂摆动轴J2(L);J1=0°时,以+Y为基准、右手 定则确定方向,下臂中心线与+Z轴平行位置为0°。
上臂摆动轴J3(U);J1、J2均0°时,以-Y轴为基 准、用右手定则确定方向,上臂中心线与+X轴平行的位 置,为0°。 腕回转轴J4(R);J1~J3均为0°时,以-X轴为基 准、用右手定则确定方向,手回转中心线与+Z轴平行的 位置为0°。 腕弯曲轴J5(B);J1~J4均为0°时,以-Y轴为基 准、用右手定则确定方向,手回转中心线与-X轴平行的 位置为0°。 手回转轴J6(T);J1~J5 均为0°时,以-X轴为基 准、用右手定则确定方向;J6轴通常可无限回转,零点 位置由工具安装法兰上的定位基准确定。
下臂中心线:机器人下臂上,与下臂摆动轴j2中心线和 上臂摆动轴j3摆动中心线垂直相交的直线 。
上臂中心线:机器人上臂上,通过手腕回转轴j4回转中 心,且与手腕摆动轴摆动中心线垂直相交的直线 。
手回转中心线:通过手回转轴J6(T)回转中心,且与 手腕工具安装法兰面垂直的直线。
二、 机器人本体坐标系
系与基座坐标系重合。
ABB工业机器人编程全集

《ABB工业机器人编程全集》是一本非常有用的书籍,它包含了大量的精彩 内容和实用技巧。通过阅读这本书,大家可以获得对ABB工业机器人编程的全面 认识,并且可以轻松地掌握其编程技术和技巧。如果大家想要了解更多有关ABB 工业机器人编程的知识,请阅读这本书。
阅读感受
在阅读《ABB工业机器人编程全集》这本书之后,我对工业机器人编程有了 更深入的理解和认识。这本书不仅提供了关于ABB工业机器人编程的全面知识, 而且也为我展示了实际应用中的各种可能性。我对此书的评价是极高的,它具有 以下几个显著的特点。
内容摘要
这些应用实例不仅可以帮助读者更好地了解机器人的应用场景和优势,同时也可以为读者提供一 些参考和借鉴。 本书的第六章介绍了ABB工业机器人的维护与保养,包括机器人的定期检查、维护保养、故障排 除和安全操作等方面的知识。这些知识对于延长机器人的使用寿命和提高工作效率非常重要。 《ABB工业机器人编程全集》是一本非常全面、实用和系统的书籍,对于想要了解和学习ABB工业 机器人编程的读者来说非常有帮助。通过本书的学习,读者可以全面掌握ABB工业机器人的编程 方法、应用场景和维护保养等方面的知识,为未来的职业发展打下坚实的基础。
目录分析
《ABB工业机器人编程全集》是一本全面介绍ABB工业机器人编程的书,其目 录经过精心设计,涵盖了ABB机器人编程的各个方面。下面将对这本书的目录进 行详细分析。
在这一章中,主要介绍了工业机器人的定义、分类、应用和发展趋势。对于 初学者来说,这是一个很好的入门章节,可以帮助他们了解工业机器人的基本知 识。
在这一章中,通过多个实际案例详细介绍了ABB工业机器人编程的实践应用, 包括零件装配、焊接、打磨、喷涂等多个应用场景的案例分析。这些案例可以帮 助读者更好地理解和应用前面所学的知识。
工业机器人操作与编程(ABB)项目二
上一页
返回
2.6 扩展提高
• 任务2.4 配置一个具有急停复位的系统I / O 信号
• 要求: 能够通过示教器配置一个具有急停复位的系统I/ O 信号, 当机 器人由急停状态转为运行状态时, 必须按下机器人控制柜上的急停复 位(电机上电) 按钮, 由于工作需要,此时需配置一个外部按钮对其进行 急停复位。
• 任务2.2 调用I / O 单元界面, 对I / O 信 号进行监控与操作
下一页 返回
2.5 考核评价
• 要求: 能通过示教器熟练地调用I/ O 单元界面, 并对I/ O 信号进行 监控与操作, 外接一个指示灯, 要求能够使用示教器对其进行强制“点 亮” 和“熄灭”, 能用专业语言正确流利地展示配置的基本步骤, 思 路清晰、有条理, 能圆满地回答老师与同学提出的问题, 并能提出一些 新的建议。
• 定义DSQC651 板的总线连接的相关参数设定详见表2 -14 。
• 具体操作步骤如图2 -6 ~ 图2 -15 所示。
下一页 返回
2.4 任务实现
• 2.4.2 数字输入信号di1 的定义
• 数字输入信号di1 的相关参数详见表2 -15。 • 具体操作步骤如图2 -16 ~ 图2 -27 所示。
返回
2.3 知识准备
• 2.3.1 ABB 机器人I / O 通信的种类
• ABB 机器人控制柜上有丰富的I/ O 通信接口, 便于和其他设备进 行通信。 ABB 机器人常用通信种类见表2 -1。
• ABB 机器人I/ O 通信接口说明: • ABB 的标准I/ O 板提供的信号处理有数字量输入DI、数字量输
项目二 ABB 机器人的 I / O 配置
• 2.1 项目描述 • 2.2 教学目的 • 2.3 知识准备 • 2.4 任务实现 • 2.5 考核评价 • 2.6 扩展提高
工业机器人离线编程(ABB)1-2 常用离线编程软件介绍
二、常用离线编程软件
1. ABB RobotStudio离线编程软件介绍
• RobotStudio 允许您使用离线控制器,即在您 PC 上本地运行的虚拟 IRC5 控制器。这种离线控制器也被称为虚拟控制器 (VC)。RobotStudio 还允许 您使用真实的物理IRC5控制器(简称为“真实控制器”)。
二、常用离线编程软件
3. YASKAWA MotoSim EG离线编程软件介绍
• MotoSim EG软件包 (2)简化软件包:和MotoSim EG完整版包含同样的软件。提供周期计算, 冲突检测和到达分析。简化版是针对已经拥有CAD程序的用户。
二、常用离线编程软件
3. YASKAWA MotoSim EG离线编程软件介绍
二、常用离线编程软件
4. KUKA SimPro离线编程软件介绍
• KUKA.Sim Pro:专为库卡机器人离线编程而开发。可以与虚拟库卡机器人 控制器实时连接,这样就可以进行周期分析和生成机器人程序。KUKA.Sim Pro同样用来建立KUKA.Sim Pro和KUKA.Sim Layout的参变量部件。
• 通过模拟可以验证方案的可行性同时获得准确的周期时间。RoboGUIDE是 一款核心应用软件,具体的还包括搬运、弧焊、喷涂等其他模块。它的仿 真环境界面是传统的Windows界面,由菜单栏,工具栏,状态栏等组成。
二、常用离线编程软件
3. YASKAWA MotoSim EG离线编程软件介绍
• MotoSim EG具有离线编程功能,可以在PC上机器人路径、速度和其他参 数(工具中心点、用户帧、I/O监视器)。用户可以移动虚拟机器人,输入 数据来编制机器人程序,并且将其下载到机器人控制器。如图1-6、1-7所 示。
工业机器人仿真与离线编程项目 2 ABB RobotStudio 软件的在线编程功能
上一页
返回
图 2 -1 “添加控制器” 按钮
返回
图 2 -2 “备份” 按钮
返回
图 2 -3 “请求写权限” 按钮
返回
图 2 -4 “配置编辑器” 按钮
返回
图 2 -5 “文件传送” 按钮
返回
图 2 -6 “在线监视器” 按钮
返回
图 2 -7 “用户管理” 按钮
返回
表 2 -1 IP 地址
项目 2 ABB RobotStud io 软件的在线编程功能
• 2.1 项目描述 • 2.2 学习目的 • 2.3 知识准备 • 2.4 任务实现
返回
2.1 项目描述
• 本项目主要学习 RobotStudio 的在线功能的 ABB 机器 人与 RobotStudio 的连接、 RobotStu ̄dio 软件中的系统备份及恢复、 在线编辑 RAPID 程序、 在线编辑 I/ O、 在线监视机器人、 设定用户操作系统等知识点。
上一页 下一页 返回
2.3 知 识 准 备
• ②工厂网络端口。 工厂网络端口用于将控制器连接到网络。 • 网络设置可以使用任何 IP 地址配置, 这通常是由网络管理员提供
的。 • (2) 当连接到控制器服务端口时, 可以选择自动获取 IP 地址或指
定固定 IP 地址。 • ①自动生成 IP 地址。 控制器服务端口的 DHCP 服务器会自动
项目 2 任务 1 中的详细说明。 • 修改指令的操作, 如图 2 -29 、图 2 -30 、图 2 -31 所示。
上一页 下一页 返回
2.4 任 务 实 现
• 2. 添加延时指令并将时间设置为 2ms • 添加延时函数指令操作, 如图 2 -32 所示。 • 3. 检查、 保存程序 • 检查、 保存程序操作, 如图 2 -33 、图 2 -34、图 2 -35
ABB工业机器人编程基础操作 ppt课件
3.WaitDI数字输入信号判断指令 WaitDI数字输入信号判断指令用于判断数字输入信号的值 是否与目标一致,di1数字输入信号。 WaitDI di1, 1; 程序执行此指令时,等待di1的值为1。如果di1为1,则程 序继续往下执行;如果到达最大等待时间300s(此时间可 根据实际进行设定)以后,di1的值还不为1,则机器人报 警或进入出错处理程序。 4.WaitDO数字输出信号判断指令 WaitDO数字输出信号判断指令用于判断数字输出信号的值 是否与目标一致。 WaitDO do1, 1; 参数以及说明同WaitDi指令。
2.关节运动指令 关节运动指令是对路径精度要求不高的情况下,工业机
器人的工具中心点TCP从一个位置移动到另一个位置,两个 位置之间的路径不一定是直线。
ABB工业机器人编程基础操作
MoveJ p10, v1000, z50, tool1\Wobj:=wobj1;
关节运动 关节运动适合机器人大范围运动时使用,不容易在运动过 程中出现关节轴进入机械死点的问题。目标点位置数据定义机 器人TCP点的运动目标,可以在示教器中单击“修改位置”进行 修改。运动速度数据定义速度(mm/s),转弯区数据定义转变 区的大小mm,工具坐标数据定义当前指令使用的工具,工件坐 标数据定义当前指令使用的工件坐标。
5.2.5 条件逻辑判断指令 条件逻辑判断指令用于对条件进行判断后,执行相应的操作,
是RAPID中重要的组成部分。 pact IF紧凑型条件判断指令
Compact IF紧凑型条件判断指令用于当一个条件满足了以后, 就执行一句指令。
IF flag1 = TRUE Set do1; 如果flag1的状态为ABTB工R业U机器E人,编程则基础d操o作1被置位为1。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
2.6 转数计数器更新
16.单击“是”。
2.6 转数计数器更新
17.重启后,选择“校准”。
2.6 转数计数器更新
18.单击“ROB_1”。
2.6 转数计数器更新
19.选择“更新转数计数器”。
7.在“备份目录/SYSPAR”路径下找到 EIO.cfg文件。
8.单击“确定”
2.5 ABB机器人数据的备份与恢复 2.5.4 单独导入EIO文件
9.单击“是”,重启后完成导入。
2.6 转数计数器更新 ABB机器人六个关节轴都有一个机械原点的位置。 在以下的情况,需要对机械原点的位置进行转数计数器更新操作: 1)更换伺服电机转数计数器电池后。 2)当转数计数器发生故障,修复后。 3)转数计数器与测量板之间断开过以后。 4)断电后,机器人关节轴发生了位移。 5)当系统报警提示“10036 转数计数器未更新”时。 以下是进行ABB机器人IRB1200转数计数器更新的操作。
2.1 示教器介绍 在示教器上,绝大多数的操作都是在触摸屏上完成的,同时也保留了必 要的按钮和操作装置。
A 链接电缆
示 教 器 解 说
B 触摸屏 C 急停开关 D 手动操纵摇杆 E USB端口 F 使能器按钮 G 触摸屏用笔
H 示教器复位按钮
2.1 示教器介绍
2.1 示教器介绍
在了解了示教器的构造以后, 来看看应该如何去拿示教器
2.3 示教器语言设置
6.点击“YES”后,系统重启。
2.3 示教器语言设置
7.重启后,单击左上角按钮就能看 到菜单已切换成中文界面
2.4 示教器事件日志查看 可以通过示教器画面上的状态栏进行ABB机器人常用信息及事件日志的查 看。
A 机器人的状态(手动、全速手动和自 动)。 B 机器人的系统信息。 C 机器人的电机状态。 D 机器人的程序运行状态。 E 当前机器人或外轴的使用状态。
2.5 ABB机器人数据的备份与恢复 2.5.2 恢复
2.单击“…”,选择备份存放的目录。
3.单击“恢复”。
2.5 ABB机器人数据的备份与恢复 2.5.2 恢复
4.单击“是”。
2.5 ABB机器人数据的备份与恢复 2.5.2 恢复
在进行恢复时,要注意:备份的数据是具有唯一性,不能将一台机器人 的备份恢复到另一台机器人中去,否则会造成系统故障。
操作者应用左手的四个 手指进行操作
当发生危险时,人会 本能地将使能器按钮 松开或按紧,机器人
则会马上停下来,保
证安全。
2.2 正确使用示教器使能按钮
使能器按钮分为两档,在手动状态下第一 档按下去,机器人处于电机开启状态,如 上图所示。
第二档按下去以后,机器人就会处于防 护装置停止状态,如上图所示。
3.选择“配置”。
2.5 ABB机器人数据的备份与恢复 2.5.4 单独导入EIO文件
4.打开“文件”菜单,单击“加载参数”。
2.5 ABB机器人数据的备份与恢复 2.5.4 单独导入EIO文件
5.选择“删除现有参数后加载”。
6.单击“加载…”
2.5 ABB机器人数据的备份与恢复 2.5.4 单独导入EIO文件
2.3 示教器语言设置
示教器出厂时,默认的显示语言是英语,为了方 便操作,下面介绍把显示语言设定为中文的操作步
骤。
1.单击左上角主菜单按钮。
2.选择 “ControlPanel”。
2.3 示教器语言设置
3.选择 “Language”。
2.3 示教器语言设置
4.选择 “Chinese”。 5.单击 “OK”。
2.6 转数计数器更新
24.操作完成后,转数计数器更新 完成。
2.6 转数计数器更新
10.单击“ROB_1”
2.6 转数计数器更新
11.选择“校准参数”。 12.选择“编辑点击校准偏移”。
2.6 转数计数器更新
13.将机器人本体上电机校准偏移记录下
来。
2.6 转数计数器更新
14.单击“是”。
2.6 转数计数器更新
15.输入刚才从机器人本体记 录的电机校准偏移数据,然后单 击“确定”。
这个时候,你就能舒适地将 示教器放在左手上,然后用 右手进行屏幕和按钮的操作
了
2.2 正确使用示教器使能按钮
使能器按钮的作用
使能器按钮是工业机
器人为保证操作人员
人身安全而设置的。
只有在按下使能器按
使能器按钮位于示教器手 钮,并保持在”点击
动操作摇杆的右侧
开启”的状态,才可
对机器人进行手动的
操作与程序的调试。
原点的刻度位置。
2.6 转数计数器更新
3.在手动操纵菜单中,动作模式选 择“轴4-6”,将关节轴5运动到机械
原点的刻度位置。
2.6 转数计数器更新
4.在手动操纵菜单中,动作模式选 择“轴4-6”,将关节轴6运动到机械
原点的刻度位置。
2.6 转数计数器更新
5.在手动操纵菜单中,动作模式选 择“轴1-3”,将关节轴1运动到机械
注意:使用手动操纵让机器人各关节轴运动到机械原点刻度位置的顺序是: 4—5—6—1—2—3。
2.6 转数计数器更新
关
关
节
节
轴
轴
4 5
关节轴6
关节轴3
1.机器人六个关节轴的机械原点刻度位 置示意图。
关节轴2 关节轴1
2.6 转数计数器更新
2.在手动操纵菜单中,动作模式选 择“轴4-6”,将关节轴4运动到机械
2.5 ABB机器人数据的备份与恢复 2.5.3 单独导入程序
4.打开“文件”菜单,点击“加载模 块…”,从“备份目录/RAPID”路径
下加载所需要的程序模块。
2.5 ABB机器人数据的备份与恢复 2.5.4 单独导入EIO文件
1.单击左上角主菜单按钮
2.选择“控制面板”
2.5 ABB机器人数据的备份与恢复 2.5.4 单独导入EIO文件
2.6 转数计数器更新
20.单击“是”。
2.6 转数计数器更新
21.单击“确定”。
2.6 转数计数器更新 如果机器人由于安装位置的关系,无法六个轴同时到达机械原点刻度位置, 则可以逐一对关节轴进行 转数计数器更新。
22.单击“全选”,然后单击“更新”。
2.6 转数计数器更新
23.单击“更新”。
原点的刻度位置。
2.6 转数计数器更新
6.在手动操纵菜单中,动作模式选择 “轴1-3”,将关节轴2运动到机械原点的
刻度位置。
2.6 转数计数器更新
7.在手动操纵菜单中,动作模式选 择“轴1-3”,将关节轴3运动到机械
原点的刻度位置。
2.6 转数计数器更新
8.单击左上角主菜单。
9.选择“校准”。
但是,也常会将程序和I/O的定义做成通用的,方便批量生产时使用。这 时,可以通过分别导入程序和EIO文件来解决实际的需要。
2.5 ABB机器人数据的备份与恢复 2.5.3 单独导入程序
1.单击左上角主菜单按钮
2.选择“程序编辑器”
2.5 ABB机器人数据的备份与恢复 2.5.3 单独导入程序
3.单击“模块”标签。
2.4 示教器事件日志查看
单击画面中的状态 栏就
可以查看机器人的 事件日志。
2.5 ABB机器人数据的备份与恢复 2.5.1 备份
1.单击左上角主菜单按钮
2.选择“备份与恢复”
2.5 ABB机器人数据的备份与恢复 2.5.1 备份
3.单击“备份当前系统…”2.5 ABB机器人数据的备份与恢复 2.5.1 备份
4.单击“ABC…”按钮,进行存放备 份数据目录名称的设定。
5.单击“…”按钮,选择备份存放的位 置(机器人硬盘或USB存储设备)
6.单击“备份”进行备份的操作。
2.5 ABB机器人数据的备份与恢复 2.5.1 备份
7.等待备份的完成
2.5 ABB机器人数据的备份与恢复 2.5.2 恢复
1.单击“恢复系统…”