基于单片机的四足机器人
一种基于单片机的四足步行机器人设计及步态研究.
一种基于单片机的四足步行机器人设计及步态研究周晓东,汤修映,农克俭中国农业大学工学院,北京(100083E-mail:摘要 :本论文通过对四足动物结构及其行走步态的研究, 设计制作了一台四足步行机器人样机, 按照多足步行机器人行走的稳定性原则, 设计出了慢走和对角小跑两种步态的具体过程,并采用单片机作为控制系统,实现了这两种步态,实验证明,所设计的步态具有良好的稳定性。
关键词:四足机器人;步态;慢走;对角小跑中图法分类号:TP2421. 引言步行机器人是一种腿式移动机构, 具有轮式、履带式等移动机器人所不具备的优点, 该类机器人能够在复杂的非结构环境中稳定地行走, 代替人完成许多危险作业, 被广泛地应用于军事运输、矿山开采、核能工业、星球表面探测、消防及营救、建筑业、农业及森林采伐、示教娱乐等众多行业。
因此, 长期以来, 多足步行机器人技术一直是国内外机器人领域研究的热点之一 [1][2]。
而四足机器人具有实现静态步行的最少腿数 [3],也适合于动态步行,以实现高速移动,因此,对四足步行机器人的研究,具有特殊的重要性。
本文以四足爬行动物为模仿对象, 通过对其结构和步态的分析和研究, 设计出了一台四足步行机器人, 采用单片机控制系统,使其能够模仿四足动物的慢走、对角小跑等步态。
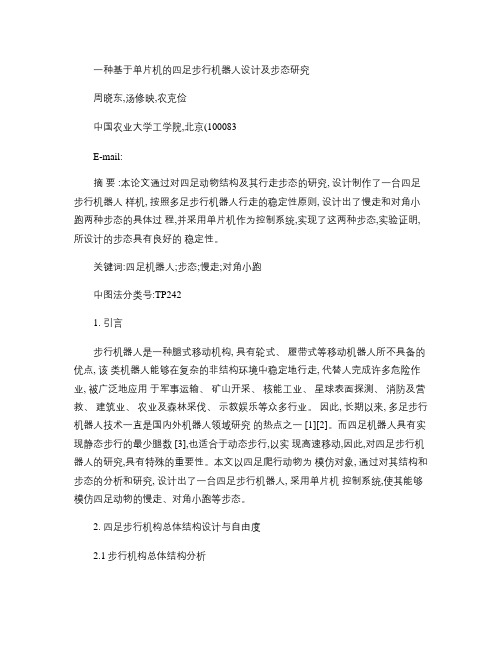
2. 四足步行机构总体结构设计与自由度2.1步行机构总体结构分析图 1为所设计的四足步行机器人总体结构示意图, 由图可知, 该机构由四条腿及机体组成,每条腿的结构完全相同,在各主动驱动关节(膝关节、臀关节、髋关节上分别装有直1踝关节 2小腿 3膝关节 4大腿 5臀关节6髋关节 7机体 8控制系统电路板图 1 总体结构示意图Fig.1 The sketch of the overall configuration流电机,整个机体上共装有 12个独立的驱动电机。
而被动关节(踝关节采用球铰链结构, 脚底部粘上胶皮以增大和地面的摩擦力, 同时可对脚与地面之间的撞击起到缓冲作用, 小腿和大腿组成平面连杆机构, 它们均可以绕着自身的关节轴在一定的角度范围内摆动, 而整条腿又可以绕着髋关节转动。
四足机器人方案设计书
浙江大学“海特杯”第十届大学生机械设计竞赛“四足机器人”设计方案书“四足机器人”设计理论方案自从人类发明机器人以来,各种各样的机器人日渐走入我们的生活。
仿照生物的各种功能而发明的各种机器人越来越多。
作为移动机器平台,步行机器人与轮式机器人相比较最大的优点就是步行机器人对行走路面的要求很低,它可以跨越障碍物,走过沙地、沼泽等特殊路面,用于工程探险勘测或军事侦察等人类无法完成的或危险的工作;也可开发成娱乐机器人玩具或家用服务机器人。
四足机器人在整个步行机器中占有很大大比重,因此对仿生四足步行机器人的研究具有很重要的意义。
所以,我们在选择设计题目时,我们选择了“四足机器人”,作为我们这次比赛的参赛作品。
一.装置的原理方案构思和拟定:随着社会的发展,现代的机器人趋于自动化、高效化、和人性化发展,具有高性能的机器人已经被人们运用在多种领域里。
特别是它可以替代人类完成在一些危险领域里完成工作。
科技来源于生活,生活可以为科技注入强大的生命力,基于此,我们在构思机器人的时候想到了动物,在仔细观察了猫.狗等之后我们找到了制作我们机器人的灵感,为什么我们不可以学习小动物的走路呢,于是我们有了我们机器人行走原理的灵感。
为了使我们所设计的机器人在运动过程中体现出特种机器人的性能及其运动机构的全面性,我们在构思机器人的同时也为它设计了一些任务:1. 自动寻找地上的目标物。
2. 用机械手拾起地上的目标物。
3.把目标物放入回收箱中。
4. 能爬斜坡。
图一如图一中虚线所示的机器人的行走路线,机器人爬过斜坡后就开始搜寻目标物体,当它发现目标出现在它的感应范围时,它将自动走向目标,同时由于相关的感应器帮助,它将自动走进障碍物中取出物体。
二.原理方案的实现和传动方案的设计:机器人初步整体构思如上的图二和图三,四只腿分别各有一个电机控制它的转动,用一个电机驱动两条腿的抬伸。
根据每只腿的迈步先后实现机器人的前进,后退,左转和右转,在机器人腿迈出的同时,它也会相应地进行抬伸,具体实现情况会在下文详细说明。
基于STM32的四足仿生机器人控制系统设计与实现
基于STM32的四足仿生机器人控制系统设计与实现近年来,随着科技的不断发展,机器人技术也得到了极大的进展。
四足仿生机器人作为一种模拟动物四肢运动方式的机器人,具有较高的机动性和适应性。
本文将介绍基于STM32的四足仿生机器人控制系统的设计与实现。
1. 引言随着社会对机器人技术需求的增加,仿生机器人的研究也变得越来越重要。
四足仿生机器人可以模拟真实动物四肢的运动方式,具备较大的运动自由度和稳定性。
其中,控制系统是四足仿生机器人实现各种功能和动作的核心。
2. 系统设计基于STM32的四足仿生机器人控制系统主要包括硬件设计和软件设计两部分。
2.1 硬件设计在硬件设计方面,需要选择合适的传感器、执行器和控制器。
传感器常用于感知环境信息,可以选择激光传感器、压力传感器和陀螺仪等。
执行器常用于驱动机器人的运动,可以选择直流电机或伺服电机。
控制器负责处理各种传感器和执行器的数据和信号,最常用的是基于STM32的微控制器。
2.2 软件设计在软件设计方面,需要编写嵌入式程序来实现机器人的各种功能和动作。
可以使用C语言或嵌入式汇编语言来编写程序。
程序需要实时处理传感器数据,控制执行器的运动,同时保证系统的稳定性和安全性。
3. 实现步骤在实现基于STM32的四足仿生机器人控制系统时,可以按照以下步骤进行:3.1 传感器数据获取通过传感器获取环境信息,并将数据传输给控制器进行处理。
可以使用SPI或I2C等通信协议进行数据传输。
3.2 运动规划根据传感器数据分析,确定机器人的运动规划。
例如,判断机器人所处环境是否有障碍物,确定机器人的步态等。
3.3 控制算法设计基于运动规划结果,设计合适的控制算法。
其中包括反馈控制、PID控制等。
控制算法需要保证机器人的稳定性和动作的准确性。
3.4 执行器控制根据控制算法计算出的控制信号,控制执行器的运动。
根据机器人的步态和动作需求,驱动各个关节实现运动。
3.5 系统优化与调试对控制系统进行优化和调试,保证系统的稳定性和性能良好。
四足机器人设计方案书

浙江大学“海特杯”第十届大学生机械设计竞赛“四足机器人”设计方案书“四足机器人”设计理论方案自从人类发明机器人以来,各种各样的机器人日渐走入我们的生活。
仿照生物的各种功能而发明的各种机器人越来越多。
作为移动机器平台,步行机器人与轮式机器人相比较最大的优点就是步行机器人对行走路面的要求很低,它可以跨越障碍物,走过沙地、沼泽等特殊路面,用于工程探险勘测或军事侦察等人类无法完成的或危险的工作;也可开发成娱乐机器人玩具或家用服务机器人。
四足机器人在整个步行机器中占有很大大比重,因此对仿生四足步行机器人的研究具有很重要的意义。
所以,我们在选择设计题目时,我们选择了“四足机器人”,作为我们这次比赛的参赛作品。
一.装置的原理方案构思和拟定:随着社会的发展,现代的机器人趋于自动化、高效化、和人性化发展,具有高性能的机器人已经被人们运用在多种领域里。
特别是它可以替代人类完成在一些危险领域里完成工作。
科技来源于生活,生活可以为科技注入强大的生命力,基于此,我们在构思机器人的时候想到了动物,在仔细观察了猫.狗等之后我们找到了制作我们机器人的灵感,为什么我们不可以学习小动物的走路呢,于是我们有了我们机器人行走原理的灵感。
为了使我们所设计的机器人在运动过程中体现出特种机器人的性能及其运动机构的全面性,我们在构思机器人的同时也为它设计了一些任务:1. 自动寻找地上的目标物。
2. 用机械手拾起地上的目标物。
3.把目标物放入回收箱中。
4. 能爬斜坡。
图一如图一中虚线所示的机器人的行走路线,机器人爬过斜坡后就开始搜寻目标物体,当它发现目标出现在它的感应范围时,它将自动走向目标,同时由于相关的感应器帮助,它将自动走进障碍物中取出物体。
二.原理方案的实现和传动方案的设计:机器人初步整体构思如上的图二和图三,四只腿分别各有一个电机控制它的转动,用一个电机驱动两条腿的抬伸。
根据每只腿的迈步先后实现机器人的前进,后退,左转和右转,在机器人腿迈出的同时,它也会相应地进行抬伸,具体实现情况会在下文详细说明。
基于单片机的仿生四足机器人设计与实现
基于单片机的仿生四足机器人设计与实现
徐永前;马西沛;程晓舟;熊绍托;黄友权
【期刊名称】《产业与科技论坛》
【年(卷),期】2024(23)9
【摘要】仿生四足机器人有着广泛的应用和研究价值,它可用于运输、作为机械宠物、辅助工人工作或代替人类在某些特殊环境下进行作业。
而对生物行为的模拟,
也可能让我们发现某些机械结构所具备的运动和力学优势,并将这些仿生机械结构
应用到更多领域。
本仿生四足机器人采用全肘式腿型配置,大腿由舵机直接带动其
旋转;小腿的运动则采用空间四杆机构,通过杠杆的方式使其摆动。
步态选择为对角
步态,单片机采用英飞凌TC264。
仿生四足机器人还装有陀螺仪,用于感知运动姿态。
为了方便发送指令和查看反馈数据,该仿生四足机器人除板载按键以外,还配有无线
转串口模块和蓝牙模块两种通讯模块。
【总页数】3页(P36-38)
【作者】徐永前;马西沛;程晓舟;熊绍托;黄友权
【作者单位】上海工程技术大学机械与汽车工程学院;上海工程技术大学继续教育
学院
【正文语种】中文
【中图分类】TP2
【相关文献】
1.基于STC单片机的仿生六足机器人设计
2.基于单片机的六足仿生机器人设计
3.基于单片机的四足智能机器人设计与实现
4.基于STM32的四足仿生机器人控制系统设计与实现
5.基于STM32单片机的四足仿生蜘蛛机器人控制系统设计
因版权原因,仅展示原文概要,查看原文内容请购买。
四足机器人(课程标准)
《四足机器人的设计与制作》课程标准一、课程名称四足机器人的设计与制作二、适用年龄范围二年级以上三、课程定位《四足机器人的设计与制作》是一门将3d打印设计、舵机的单片机控制与仿生学动力原理相互结合的一门综合课程。
本课程以培养学生知识的综合运用能力为目的,在实践中发现问题并解决问题。
同时为后续创客课程打下坚实的基础。
1.这是一门综合运用机械、电子和数学知识的课程。
学生需要学会从顶层到底层的思考模式,即由最终爬行的四足机器人,拆分到每个环节应该如何去实现。
这是掌握任务设计思维的基础课程,同时对后续课程的进行起到至关重要的作用。
四、课程目标1.知识与技能的目标3D打印设计的学习与巩固仿生动力学原理的了解与运用舵机单片机控制原理的了解2.个人素养的目标空间思维能力与耐心的提高观察能力与动手实践能力的提高培养主动学习和深入学习的习惯发现问题和解决问题能力的提升五、课程设计《四足机器人的设计与制作》课程主要以学生自行参与动手时间为主,在教学过程中,重点应该放在学生课堂的实践,采用实践与理论一体化的教学方式,使学生能够在做中学,学中玩。
课程设计思路如下:(1)以课堂任务为载体,将教学内容融入其中,实现理论与实践一体化教学。
在基于项目式的教学过程中,学生是主要的行为者,全程实现小班化教学,学生以个体或者小组的形式,在老师的指导下完成任务。
老师需要根据学生每堂课的课堂表现和完成任务情况给予评价。
(2)基于项目式教学的基本方法如下:引入:使用视频、游戏、图片等方式引出课程,明确教学任务,培养学生从顶层到底层思考问题的能力。
设计制作:根据四足所涉及到的知识点进行教学任务的分解安排,首先使用3D打印设计制作机器人的机械部分,其次使用舵机控制板控制多个舵机联合运动,最后进行调试与运动。
拓展与运用:结合开源硬件Arduino和超声波传感器制作智能避障四足机器人。
学习结果评价:根据每堂课的表现和最终任务完成情况给予结果的综合评价。
四足仿生动物机器人设计
四足仿生动物机器人设计发布时间:2022-07-16T07:53:09.501Z 来源:《中国科技信息》2022年第33卷3月5期作者:马宁1 韦良波1 张麒瑞1 王泽1 梁庆2 钟海雄2卢振坤3[导读] 四足仿生动物的制作技术,融合了机械、电气动(或液压)、遥感、自动控制、仿生、艺术造型等多种技术学科,马宁1 韦良波1 张麒瑞1 王泽1 梁庆2 钟海雄2 卢振坤31.广西本博科技有限公司2.南宁职业技术学院3.广西民族大学电子信息学院摘要:四足仿生动物的制作技术,融合了机械、电气动(或液压)、遥感、自动控制、仿生、艺术造型等多种技术学科,根据被模仿动物的形态、特性以及实际使用需要,进行产品的设计、制造。
关键词:机器人;自动化;仿生一、前言目前,移动机器人已经成为全球机器人领域的一个重要课题。
波士顿电力公司于2011年推出“LS3”四足行走仿生机器人,该机器人具有视觉跟踪、地形识别、 GPS等尖端技术,步伐灵活,平衡性强,可在崎岖的山区中负重行走。
2012年,麻省理工大学推出了一款名为“Cheetah”的仿生豹形四脚机器人,它可以在奔跑时实现腿部的伸展和收缩,并且能够依靠自己的视觉识别障碍并快速的跳跃。
瑞士苏黎世理工大学在2016年推出了一款新型的四脚机器人—— ANYmal,它使用了多种传感器,重量轻,可在2-4个小时内完成充电,并具备自动驾驶的能力,这将成为未来机器人迈向智能化的一个重要特征。
通常的移动机器人有三种类型,即两足、四足、六足,每一种都有其优缺点。
相对于四足机器人,双足机器人具有稳定性差、动态性能差、负载能力低、地形适应性差的特点;四足机器人应用最广泛。
本论文以四足爬行类为研究对象,运用平面杆并联式传动机构的爬行原理,以仿生学为依据,对四足爬行机器人进行了本体结构设计。
二、硬件方案设计四足仿生动物机器人一般采用钢筋骨架作为身体支架,以机械结构和动力控制系统作为内部执行机构来实现各种仿生动作。
基于STM32和树莓派的四足人形机器人系统
有 0到 3 0 0 。 的转动范 围 , 在此范围 内具备精确位置控制性
能 , 速度 可调 , 一个简 单的控 制指令就 可以 自动转动 到一
个 比较 精确的角度 , 所 以非 常适合 在关节型机器人产品上使
用。
有 ATK —HCO 5蓝牙 串 口模 块 , Wo o d y控制 器 以树莓 派 ( r a s p b e r r y p i )为核心 。S TM3 2作为本机器人的主控芯片 ,
树 莓派的四足人形机器人系统设计进行了研究 ,利用机械散件和舵机搭建 了一 个四足人形机 器
人并使 用 S T M3 2 、 树莓派 、 蓝 牙实现了对 机器人的控制 , 该机器人可以实现抬头 、 抬手、 鼓掌 、 转身 、前进 、 转弯 、 发声等模拟人类 的行 为与动作 , 该项研究具有广泛的应用范围和应用前景 。
树莓 派作为副芯片 。 ST M3 2是 ~ 款 低 功 耗 、 高 性 能 、集 成 度 高 、接 口 丰 富
机 器 人 架 构
本机器人 由舵 机作 为关 节 ,一些机械 散件拼装而 成 .总 体分为头 、 躯干 、 手臂和腿四个部分 。 头部部分 , 如图 1 所示 , 主体 同样为一个舵 机 ,此舵机 使得头部可 以上下运动 进 而 可 以完成点头的 、抬头 、低头的动作 ,图 1中头部的两个 眼
处理能 力 。
树莓 派 ( r a s p b e r r y p i )是一 款基 于 ARM 的微 型 电脯 主板 ,它提供 了以太网 ( B版 ),USB,HDMl 接口 基于 L i n u x的操作系统 , P y t h o n的语言开发环境 , 同时也支持 C, J AV A等 语言 ,本文 中使用 的树 莓派功能 已封装完毕 .可实
四足机器人系统设计
(此文档为word格式,下载后您可任意编辑修改!)摘要四足机器人作为仿生机器人的一种,得到了广泛的研究。
行走机构和转弯机构是四足机器人最关键的部分,目前,行走机构的研究大多采用在腿机构的关节处安装伺服电机进行驱动,增加了机器人的重量和控制策略的难度。
并且,机器人本体大多是一个刚性整体,转弯机构研究不足。
为此,项目将四足机器人本体作为一个柔性整体,采用三维建模软件Pro/E4.0设计了四足机器人的机械系统,提出了一种新颖的凸轮控制驱动式行走机构,设计了一种腿机构以及相应的凸轮控制驱动机构,并初步设计了柔性转弯机构。
在此基础上,论文采用主从式控制方式设计了四足机器人的控制系统,重点讨论了以8051单片机为控制器的行走机构和转向机构的控制系统设计。
关键词:四足机器人;行走机构;凸轮驱动;控制系统;三维设计AbstractQuadruped robot as one of biomimetic robots, has been extensively studied. Travel agencies and institutions is a quadruped robot turning the key, At the present, servo motor is installed in the leg joints of the most travel agencies, increasing the weight of the robot and the difficulty of the control system strategy . And most of the robot is a rigid body as a whole, and the research of the turning institutions is not fully studied . For this purpose, the project will take four-legged robot whole body as a flexible rigid body, and three-dimensional modeling software Pro/E4.0 is used for designing quadruped robot mechanical systems, a new travel agency based on cam control drive is proposed , a kind of leg mechanism and control of the corresponding cam drive mechanism is designed, and a flexible turning institution is preliminary designed. Based on this work, thecontrol system of the robot was designed. Especially, control systems of the stepped mechanism and the wheel mechanism were analyzed detailed.Key words: quadruped robot; stepped mechanism; cam drive; control system ;three dimensional design;目录1.引言 (1)1.1机器人及其相关技术的发展 (1)1.2国内外四足行走机器人得研究概况 (2)1.3机器人学主要涉及的学科内容 (4)1.4课题简介 (5)2.机器人系统总体设计 (6)2.1机器人系统结构概述 (6)2.2四足机器人研发流程 (7)2.3四足机器人系统结构设计 (9)3.四足机器人机械系统的结构设计技术 (10)3.1机器人机械设计的内容及特点 (10)3.2机械结构总体设计 (11)3.3行走机构的研究 (13)3.4行走机构的设计计算 (19)3.5转弯机构的设计 (24)3.6腱机构 (28)3.7机器人的外形设计 (28)3.8驱动系统的设计 (29)4.控制系统的硬件设计 (35)4.1传感器 (35)4.2控制器 (36)4.3控制系统 (39)5.控制系统的软件设计 (42)5.1行走系统软件设计 (42)5.2转弯控制系统软件设计 (43)总结 (47)参考文献 (49)致谢 (51)凸轮控制驱动式的四足机器人系统设计1. 引言1.1机器人及其相关技术的发展自从人类制造出了一电子计算机为代表的各种信息处理和计算的工具,进一步拓展和延伸了人类大脑的功能。
基于STM32F4的12自由度四足机器人设计与实现
第40卷第5期辽宁工业大学学报(自然科学版)V ol.40, No.5 2020年10月Journal of Liaoning University of Technology(Natural Science Edition)Oct. 2020收稿日期:2020-02-09作者简介:刘沛(1997-),男,河南镇平人,本科生。
石飞(1983-),男(土家族),重庆人,实验师,硕士。
DOI:10.15916/j.issn1674-3261.2020.05.004基于STM32F4的12自由度四足机器人设计与实现刘沛,林国源,田晓旭,石飞(新疆大学信息科学与工程学院,新疆乌鲁木齐830046)摘 要:设计并实现了一种基于STM32F4的12自由度四足机器人,运用3D打印技术实现机械制作,对运动轨迹进行运动学分析,利用对角小跑步态对四足机器人进行步态算法规划。
详细介绍了四足机器人的机械部分、电路部分和软件部分的设计与实现。
实验测试结果表明,设计的四足机器人结构稳定、性能较好,更适用于复杂和危险的环境。
关键词:12自由度;四足机器人;STM32F4;对角小跑步态中图分类号:TP249 文献标识码:A文章编号:1674-3261(2020)05-0296-05Design and Implementation of 12 Dof Quadruped RobotBased on STM32F4LIU Pei, LIN Guo-yuan, TIAN Xiao-xu, SHI Fei(Xinjiang University School of information science and Engineering, Urumqi, 830046, China)Abstract:In this parper, a twelve-degree-of-freedom quadruped robot based on STM32F4 is designed and implemented, and the mechanical production is realized by using 3D printing technology. Kinematics analysis is conducted on the movement trajectory, and gait algorithm planning is carried out on the quadruped robot by using diagonal trot gait. In this paper, the design and realization of the mechanical part, the circuit part and the software part of the four groups of robots are introduced in detail. Experimental results show that the quadruped robot designed in this paper has stable structure and good performance, and is more suitable for complex and dangerous environments.Key words: twelve degrees of freedom; quadruped robot; STM32F4; diagonal trot gait近年来机器人在军事、生活、工业领域越来越受社会和国家重视,而能够适应复杂环境地形的足式机器人更是受到广泛关注,足式机器人可以摆脱轮式机器人对复杂环境地形的限制,自由穿梭于森林、河流、山坡、沙漠等严峻的地貌。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
—-可编辑修改,可打印——别找了你想要的都有!精品教育资料——全册教案,,试卷,教学课件,教学设计等一站式服务——全力满足教学需求,真实规划教学环节最新全面教学资源,打造完美教学模式深圳大学期末考试试卷开/闭卷开卷A/B卷N/A课程编号13032700011303270002 课程名称EDA技术与实践(2)学分2.0命题人(签字) 审题人(签字) 2015 年10 月20 日设计考试题目:完成一个集成电路或集成系统设计项目基本要求:2-3位同学一组,完成一个完整的集成电路设计项目或是一个集成系统设计项目。
规格说明:1.题目自定。
1)集成电路设计项目i.若为IC设计项目需要完成IC设计的版图。
ii.若采用FPGA实现数字集成电路设计,需要进行下板测试。
2)集成系统设计项目,需使用FPGA开发板或嵌入式开发板,完成一个完整的集成系统作品。
3)作品需要课堂现场演示,最后提交报告,每个小组单独一份报告,但需阐述各个成员的工作。
2.评分标准:2015年第二学期,建议作品内容:完成一个行走机器人,基本要求o2-8只脚o能行走o可以用单片机,嵌入式,FPGA方案一、设计目的:通过设计一个能够走动的机器人来增加对动手能力,和对硬件电路设计的能力,增强软件流程设计的能力和对设计流程实现电路功能的能力,在各个方面提升自己对电子设计的能力。
二、设计仪器和工具:本设计是设计一个能走动的机器人,使用到的仪器和工具分别有:sg90舵机12个、四脚机器人支架一副、单片机最小系统一个、电容电阻若干、波动开关一个、超声遥控模块一对、杜邦线若干、充电宝一个。
三、设计原理:本次设计的机器人是通过51单片机控制器来控制整个电路的。
其中,舵机的控制是通过产生一个周期为20毫秒的高电平带宽在0.5到2.5ms之间的pwm信号来控制。
12路Pwm信号由单片机的定时器来产生。
51单片机产生12路pwm信号的原理是:以20毫秒为周期,把这20毫秒分割成8个2.5ms,因为,每个pwm信号的高电平时间最多为2.5ms,然后在前六个2.5ms中分别输出两个pwm信号的高电平,例如,在第一个2.5ms中输出第一个和第二个pwm信号的高电平时,首先开始时,把信号S1、S2都置1,然后比较两个高电平时间,先定时时间短的高电平时间,把高电平时间短的那个信号置0,再定时两个高电平时间差,到时把高电平时间长的按个信号置0,然后,定时(2.5-较长那个高电平时间),在第二个2.5ms开始时,把S3、S4置1,接下来和上面S1、S2一样,以此类推,在六个2.5ms 中输出12路pwm信号来控制舵机。
原理图如图1.通过超声模块来控制机器人前进、后退、向前的左转、向前的右转、向后的左转、向后的右转几个动作。
控制模块电路,D0,D1,D2,D3分别为超声接受模块的输出,输出为高电平,要加NPN作为开关。
四、设计步骤:1、设计好硬件电路,焊接51单片机的最小系统和各个硬件电路。
2、设计好软件的流程图,如图2。
3、写产生12路控制舵机的pwm信号的程序并在proteus中测试,如图3。
4、设计出行走步态,四脚机器人的步态是采用对角的相互前进来实现的,如图4。
5、写出流程图中各个模块的软件,包括前进函数、后退函数、左转和右转的函数,并逐个烧到单片机中测试。
6、按流程图把各个函数组合到主函数中,完成所有软件的编写,并烧到单片机中测试,并不断的调试。
图2.流程图图3.在proteus里测试并调试pwm信号图4,行走步态五、遇到的问题及解决:1、此设计的pwm信号输出使用定时器来产生每个信号的高电平和低电平,每次定时时间到,都会会关掉定时器并执行中断函数,在此过程中会消耗一定的时间,等到给定时器赋值下一次定时时间并开始定时时,就会产生一定的时间延时,造成每次高电平时间都会变长一点,且总的加起来会使20ms周期变长,因此,需要稍微减小高电平的定时时间,并结合proteus仿真确定最准确值。
2、由于机器人的四个脚都是自己组装的,可能会有存在不平衡和对称,当对角的两只脚同时向前迈同一个角度时,会使机器人向一个方向偏转而不沿直线前进,这时要结合实际测试来调整机器人的各个脚的前迈角度来使机器人平衡的沿直线前进,比如,一只脚迈多点,另一边的脚迈少点。
六、心得与体会:通过这次设计,我更加的熟悉基本的硬件电路和软件的设计,特别是软件的流程图设计。
更加熟悉软硬件电路结合的测试与调试。
六、实验实物图:精选资料设计代码:#include<reg51.h>#define uchar unsigned char#define uint unsigned intuintpwm[12],p_min1,p_max1,p_min2,p_max2,p_min3,p_max3,p_min4,p_max4,p_min5,p_ma x5,p_min6,p_max6,p1,p2,p3,p4,p5,p6,p11,p21,p31,p41,p51,p61;//高电平带宽sbit s0=P2^0;//12路输出信号sbit s1=P2^1;sbit s2=P2^2;sbit s3=P2^3;sbit s4=P2^4;sbit s5=P2^5;sbit s6=P2^6;sbit s7=P2^7;sbit s8=P0^6;sbit s9=P0^4;sbit s10=P0^2;sbit s11=P0^0;sbit up=P1^0;sbit right=P1^4;sbit left=P1^2;sbit down=P1^6;uchar s_num,f,b,r,l,back_flag;forward_flag;.void back();//后退void forward(); //前进void back_right(); //后右转、前左转void back_left(); //后左转、前右转void scan_key();//遥控监控void labor_init();//机器人的初始状态void delay(uint i) //延时函数,延时一秒{uint j;for(i;i>0;i--)for(j=110;j>0;j--);}void init(void)//中断初始函数{TMOD=0x01;TR0=1;ET0=1;EA=1;}void rate(uint p[12])//pwm的排序函数{p_min1=(p[0]<=p[1]?(p[0]):(p[1]))-40;精选资料p_max1=p[0]>p[1]?(p[0]):(p[1]);p_min2=(p[2]<=p[3]?p[2]:p[3])-64;p_max2=p[2]>p[3]?p[2]:p[3];p_min3=(p[4]<=p[5]?p[4]:p[5])-64;p_max3=p[4]>p[5]?p[4]:p[5];p_min4=(p[6]<=p[7]?p[6]:p[7])-64;p_max4=p[6]>p[7]?p[6]:p[7];p_min5=(p[8]<=p[9]?p[8]:p[9])-64;p_max5=p[8]>p[9]?p[8]:p[9];p_min6=(p[10]<=p[11]?p[10]:p[11])-64;p_max6=p[10]>p[11]?p[10]:p[11];p1=p_max1-p_min1-21;p2=p_max2-p_min2-42;p3=p_max3-p_min3-42;p4=p_max4-p_min4-42;p5=p_max5-p_min5-42;p6=p_max6-p_min6-42;p11=2400-p_max1;p21=2400-p_max2;p31=2400-p_max3;p41=2400-p_max4;p51=2400-p_max5;p61=15500-p_max6;TH0=-p_min1/256;TL0=-p_min1%256;s_num=0;s0=1;.s1=1;init();}void scan_key(){if(P1!=0xff){delay(5);if(up==0){f=0;}if(down==0)b=0;if(right==0)r=0;if(left==0)l=0;}}void time0() interrupt 1 //中断产生12路pwm信号{TR0=0;精选资料switch(s_num){case 0:if(pwm[0]<=pwm[1]){if(pwm[0]==pwm[1]){s0=0;s1=0;s_num++;TH0=-(p1-0)/256;TL0=-(p1-0)%256;break;}elses0=0;}elses1=0;TH0=-p1/256;TL0=-p1%256;s_num++;break;case 1:if(pwm[0]>pwm[1])s0=0;elses1=0;TH0=-p11/256;TL0=-p11%256;s_num++;break;case 2:s2=1;s3=1;TH0=-p_min2/256;.TL0=-p_min2%256;s_num++;break;case 3:if(pwm[2]<=pwm[3]){if(pwm[2]==pwm[3]){s2=0;s3=0;s_num++;TH0=-p2/256;TL0=-p2%256;break;} elses2=0;}elses3=0;TH0=-p2/256;TL0=-p2%256;s_num++;break;case 4:if(pwm[2]>pwm[3])s2=0;elses3=0;TH0=-p21/256;TL0=-p21%256;s_num++;break;case 5:s4=1;s5=1;TH0=-p_min3/256;精选资料TL0=-p_min3%256;s_num++;break;case 6:if(pwm[4]<=pwm[5]){if(pwm[4]==pwm[5]){s4=0;s5=0;s_num++;TH0=-p3/256;TL0=-p3%256;break;} elses4=0;}elses5=0;TH0=-p3/256;TL0=-p3%256;s_num++;break;case 7:if(pwm[4]>pwm[5])s4=0;elses5=0;TH0=-p31/256;TL0=-p31%256;s_num++;break;case 8:s6=1;s7=1;TH0=-p_min4/256;.TL0=-p_min4%256;s_num++;break;case 9:if(pwm[6]<=pwm[7]){if(pwm[6]==pwm[7]){s6=0;s7=0;s_num++;TH0=-p4/256;TL0=-p4%256;break;} elses6=0;}elses7=0;TH0=-p4/256;TL0=-p4%256;s_num++;break;case 10:if(pwm[6]>pwm[7])s6=0;elses7=0;TH0=-p41/256;TL0=-p41%256;s_num++;break;case 11:s8=1;s9=1;TH0=-p_min5/256;精选资料TL0=-p_min5%256;s_num++;break;case 12:if(pwm[8]<=pwm[9]){if(pwm[8]==pwm[9]){s8=0;s9=0;s_num++;TH0=-p5/256;TL0=-p5%256;break;} elses8=0;}elses9=0;TH0=-p5/256;TL0=-p5%256;s_num++;break;case 13:if(pwm[8]>pwm[9])s8=0;elses9=0;TH0=-p51/256;TL0=-p51%256;s_num++;break;case 14:s10=1;s11=1;TH0=-p_min6/256;.TL0=-p_min6%256;s_num++;break;case 15:if(pwm[10]<=pwm[11]){if(pwm[10]==pwm[11]){s10=0;s11=0;s_num++;TH0=-p6/256;TL0=-p6%256;break;} elses10=0;}elses11=0;TH0=-p6/256;TL0=-p6%256;s_num++;break;case 16:if(pwm[10]>pwm[11])s10=0;elses11=0;TH0=-p61/256;TL0=-p61%256;s_num++;break;case 17:s0=1;s1=1;精选资料s_num=0;TH0=-p_min1/256;TL0=-p_min1%256;break;}scan_key();TR0=1;}void motor_init1()//给所有信号都设高电平时间为1.5毫秒{uchar i;for(i=0;i<12;i++)pwm[i]=1500;}void labor_init()//机器人的初始状态{motor_init1();l=1;f=1;r=1;b=1;. back_flag=0;forward_flag=0;rate(pwm);//delay(200);while(1){if(r==0){r=1;back_right();}if(l==0){l=1;back_left();}if(f==0){f=1;forward();}if(b==0){b=1;back();}}精选资料}void back(){back_flag=1;forward_flag=0;motor_init1();pwm[8]=pwm[8]+300;pwm[9]=pwm[9]-250;pwm[2]=pwm[2]+150;pwm[3]=pwm[3]-150;pwm[7]=pwm[7]+50;//pwm[0]=pwm[0]-80;//pwm[5]=pwm[5]+80;//pwm[11]=pwm[11]-30;rate(pwm);delay(500);pwm[3]=pwm[3]+320;pwm[8]=pwm[8]-200;pwm[4]=pwm[4]+600;pwm[5]=pwm[5]+600;pwm[6]=pwm[6]+600;pwm[7]=pwm[7]+600;rate(pwm);delay(300);pwm[4]=pwm[4]-600;. pwm[5]=pwm[5]-600;pwm[6]=pwm[6]-600;pwm[7]=pwm[7]-600;rate(pwm);delay(300);while(1){if(r==0){r=1;back_right();}if(l==0){l=1;back_left();}if(f==0){f=1;forward();}if(b==0)b=1;pwm[3]=pwm[3]-320;pwm[8]=pwm[8]+200;pwm[2]=pwm[2]-270;精选资料pwm[9]=pwm[9]+320;pwm[1]=pwm[1]-600;pwm[0]=pwm[0]-600;pwm[10]=pwm[10]-600;pwm[11]=pwm[11]-600;rate(pwm);delay(300);pwm[1]=pwm[1]+600;pwm[0]=pwm[0]+600;pwm[10]=pwm[10]+600;pwm[11]=pwm[11]+600;rate(pwm);delay(500);pwm[2]=pwm[2]+270;pwm[9]=pwm[9]-320;pwm[3]=pwm[3]+320;pwm[8]=pwm[8]-200;pwm[4]=pwm[4]+600;pwm[5]=pwm[5]+600;pwm[6]=pwm[6]+600;pwm[7]=pwm[7]+600;rate(pwm);delay(300);pwm[4]=pwm[4]-600;pwm[5]=pwm[5]-600;pwm[6]=pwm[6]-600;pwm[7]=pwm[7]-600;.rate(pwm);delay(500);if(P1!=0xff)forward();}}void back_right(){motor_init1();pwm[8]=pwm[8]+50;pwm[9]=pwm[9]-50;//pwm[2]=pwm[2]+150;//pwm[3]=pwm[3]-150;pwm[7]=pwm[7]+100;//pwm[0]=pwm[0]-80;//pwm[5]=pwm[5]+80;//pwm[11]=pwm[11]-30;rate(pwm);delay(300);pwm[3]=pwm[3]-70;pwm[8]=pwm[8]-70;pwm[4]=pwm[4]+600;pwm[5]=pwm[5]+600;pwm[6]=pwm[6]+600;精选资料pwm[7]=pwm[7]+600;rate(pwm);delay(300);pwm[4]=pwm[4]-600;pwm[5]=pwm[5]-600;pwm[6]=pwm[6]-600;pwm[7]=pwm[7]-600;rate(pwm);delay(300);while(1){if(r==0){if(back_flag==1){r=1;back_right();}if(forward_flag==1){r=1;back_left();}}if(l==0). {if(back_flag==1){l=1;back_left();}if(forward_flag==1){l=1;back_right();}}if(f==0){f=1;forward();}if(b==0){b=1;back();}pwm[3]=pwm[3]+70;pwm[8]=pwm[8]+70;pwm[2]=pwm[2]-70;pwm[9]=pwm[9]-70;pwm[1]=pwm[1]-600;精选资料pwm[0]=pwm[0]-600;pwm[10]=pwm[10]-600;pwm[11]=pwm[11]-600;rate(pwm);delay(300);pwm[1]=pwm[1]+600;pwm[0]=pwm[0]+600;pwm[10]=pwm[10]+600;pwm[11]=pwm[11]+600;rate(pwm);delay(500);pwm[2]=pwm[2]+70;pwm[9]=pwm[9]+70;pwm[3]=pwm[3]-70;pwm[8]=pwm[8]-70;pwm[4]=pwm[4]+600;pwm[5]=pwm[5]+600;pwm[6]=pwm[6]+600;pwm[7]=pwm[7]+600;rate(pwm);delay(300);pwm[4]=pwm[4]-600;pwm[5]=pwm[5]-600;pwm[6]=pwm[6]-600;pwm[7]=pwm[7]-600;rate(pwm);delay(300);.}}void back_left(){motor_init1();pwm[8]=pwm[8]+50;pwm[9]=pwm[9]-50;//pwm[2]=pwm[2]+150;//pwm[3]=pwm[3]-150;pwm[6]=pwm[6]+50;pwm[7]=pwm[7]+100;//pwm[0]=pwm[0]-80;//pwm[5]=pwm[5]+80;//pwm[11]=pwm[11]-30;rate(pwm);delay(300);pwm[3]=pwm[3]+70;pwm[8]=pwm[8]+70;pwm[4]=pwm[4]+600;pwm[5]=pwm[5]+600;pwm[6]=pwm[6]+600;pwm[7]=pwm[7]+600;rate(pwm);delay(300);精选资料pwm[4]=pwm[4]-600;pwm[5]=pwm[5]-600;pwm[6]=pwm[6]-600;pwm[7]=pwm[7]-600;rate(pwm);delay(300);while(1){if(r==0){if(back_flag==1){r=1;back_right();}if(forward_flag==1){r=1;back_left();}}if(l==0){if(back_flag==1){l=1;.back_left();}if(forward_flag==1){l=1;back_right();}}if(f==0){f=1;forward();}if(b==0){b=1;back();}pwm[3]=pwm[3]-70;pwm[8]=pwm[8]-70;pwm[2]=pwm[2]+70;pwm[9]=pwm[9]+70;pwm[1]=pwm[1]-600;pwm[0]=pwm[0]-600;pwm[10]=pwm[10]-600;pwm[11]=pwm[11]-600;精选资料rate(pwm);delay(300);pwm[1]=pwm[1]+600;pwm[0]=pwm[0]+600;pwm[10]=pwm[10]+600;pwm[11]=pwm[11]+600;rate(pwm);delay(500);pwm[2]=pwm[2]-70;pwm[9]=pwm[9]-70;pwm[3]=pwm[3]+70;pwm[8]=pwm[8]+70;pwm[4]=pwm[4]+600;pwm[5]=pwm[5]+600;pwm[6]=pwm[6]+600;pwm[7]=pwm[7]+600;rate(pwm);delay(300);pwm[4]=pwm[4]-600;pwm[5]=pwm[5]-600;pwm[6]=pwm[6]-600;pwm[7]=pwm[7]-600;rate(pwm);delay(300);}}.void forward(){forward_flag=1;back_flag=0;motor_init1();pwm[2]=pwm[2]-150;pwm[3]=pwm[3]+220;pwm[8]=pwm[8]+10;pwm[11]=pwm[11]-20;rate(pwm);delay(500);pwm[3]=pwm[3]-300;pwm[8]=pwm[8]+300;pwm[4]=pwm[4]+600;pwm[5]=pwm[5]+600;pwm[6]=pwm[6]+600;pwm[7]=pwm[7]+600;rate(pwm);delay(300);pwm[4]=pwm[4]-600;pwm[5]=pwm[5]-600;pwm[6]=pwm[6]-600;pwm[7]=pwm[7]-600;精选资料rate(pwm);delay(300);while(1){if(r==0){r=1;back_left();}if(l==0){l=1;back_right();}if(b==0){b=1;back();}if(f==0)f=1;pwm[3]=pwm[3]+300;pwm[8]=pwm[8]-300;pwm[2]=pwm[2]+300;pwm[9]=pwm[9]-280;. pwm[1]=pwm[1]-600;pwm[0]=pwm[0]-600;pwm[10]=pwm[10]-600;pwm[11]=pwm[11]-600;rate(pwm);delay(300);pwm[1]=pwm[1]+600;pwm[0]=pwm[0]+600;pwm[10]=pwm[10]+600;pwm[11]=pwm[11]+600;rate(pwm);delay(500);pwm[2]=pwm[2]-300;pwm[9]=pwm[9]+280;pwm[3]=pwm[3]-300;pwm[8]=pwm[8]+300;pwm[4]=pwm[4]+600;pwm[5]=pwm[5]+600;pwm[6]=pwm[6]+600;pwm[7]=pwm[7]+600;rate(pwm);delay(300);pwm[4]=pwm[4]-600;pwm[5]=pwm[5]-600;pwm[6]=pwm[6]-600;pwm[7]=pwm[7]-600;rate(pwm);精选资料delay(500);if(P1!=0xff)back();}}void main(void){labor_init();}. THANKS !!!致力为企业和个人提供合同协议,策划案计划书,学习课件等等打造全网一站式需求欢迎您的下载,资料仅供参考。