四足机器人步行腿运动学正反解
本科毕业论文---四足步行机器人腿的机构设计(论文)设计
毕业设计(论文)四足步行机器人腿的机构设计学生姓名:学号:所在系部:专业班级:指导教师:日期:摘要本文介绍了国内外四足步行机器人的发展状况和三维制图软件SolidWorks的应用,着重分析了设计思想并对行走方式进行了设计并在此软件基础上四足步行机器人腿进行了绘制,对已绘制的零部件进行了装配和三维展示。
展示了SolidWorks强大的三维制图和分析功能。
同时结合模仿四足动物形态展示出了本次设计。
对设计的四足行走机器人腿进行了详细的分析与总结得出了该机构的优缺点。
本文对四足机器人腿的单腿结构分析比较详细,并结合三维进行理性的理解。
关键词:SolidWorks;足步行机器人腿AbstractIn this paper, fouth inside and outside the two-legged walking robot and the development of three-dimensional mapping of the application of SolidWorks software, focused on an analysis of design concepts and approach to the design of walking and the basis of this software quadruped walking robot legs have been drawn on components have been drawn to the assembly and three-dimensional display. SolidWorks demonstrated a strong three-dimensional mapping and analysis functions. At the same time, combined with four-legged animal patterns to imitate the design show. The design of four-legged walking robot legs to carry out a detailed analysis and arrive at a summary of the advantages and disadvantages of the institution. In this paper, four single-legged robot more detailed structural analysis, combined with a rational understanding of three-dimensional.Keywords:SolidWorks; four-legged walking robot目录摘要 (I)Abstract (II)1 绪论 (1)1.1 步行机器人的概述 (1)1.2 步行机器人研发现状 (1)1.3 存在的问题 (5)2 四足机器人腿的研究 (6)2.1 腿的对比分析 (6)2.1.1 开环关节连杆机构 (6)2.1.2 闭环平面四杆机构 (9)2.2 腿的设计 (11)2.2.1 腿的机构分析 (12)2.2.2 支撑与摆动组合协调控制器 (18)2.3 单条腿尺寸优化 (21)2.3.1 数学建模 (21)2.3.2 运动特征的分析 (23)2.4 机器人腿足端的轨迹和运动分析 (24)2.4.1 机器人腿足端的轨迹分析 (24)2.4.2 机器人腿足端的运动分析 (27)3 机体设计 (30)3.1 机体设计 (30)3.1.1 机体外壳设计 (30)3.1.2 传动系统设计 (31)3.2 利用Solid Works进行腿及整个机构辅助设计 (35)4 结论 (36)4.1 论文完成的主要工作 (36)4.2 总结 (36)参考文献 (37)致谢 (39)1绪论1.1 步行机器人的概述机器人相关的研发和应用现如今早已变成每个国家的重要科研项目之一,通过运用机器人来代替人们的某些危险工作或者帮助残疾人完成自己所不能完成的事情。
四足机器人控制算法

四足机器人控制算法
四足机器人的控制算法涉及到多个方面,包括步态生成、运动规划、力矩控制等。
下面是一般用于四足机器人控制的一些基本算法:
1. 步态生成算法:
-行走周期:确定每步的时间周期。
-支撑相和摆动相:在一个步态周期中,确定哪些腿是支撑在地面上的,哪些腿是摆动的。
2. 运动规划算法:
-逆运动学:确定每个关节角度,以实现期望的末端效应器的位置。
-前馈控制:根据期望的运动轨迹,预测并施加相应的力或力矩,以优化运动。
3. 传感器融合:
-使用传感器(例如惯性测量单元、摄像头等)获取机器人周围环境的信息,以调整步态和避免碰撞。
4. 力矩控制算法:
- PID控制:使用比例、积分和微分项来调整关节力矩,以实现期望的运动。
-模型预测控制(MPC):基于机器人的动力学模型进行预测,然后优化控制输入,以最小化误差。
5. 路径规划和避障算法:
-确保机器人在执行任务时能够避开障碍物,包括静态和动态障碍物。
-可以使用基于地图的路径规划算法,如A*算法,或者利用传感器信息实时规划路径。
6. 学习算法:
-强化学习:使用强化学习算法,例如深度强化学习(DRL),来优化步态和运动规划。
-监督学习:通过示例数据进行监督学习,提高机器人在不同任务上的性能。
需要注意的是,四足机器人的控制算法通常是一个复杂的系统,需要综合考虑机器人的动力学、传感器信息、任务需求等多个因素。
同时,实际应用中可能需要不同的算法组合,具体的选择也取决于机器人的设计和应用场景。
机器人的正运动学和逆运动学
机器人的正运动学和逆运动学
机器人是一种能够自主执行任务的机械设备,它们可以在工业、医疗、军事等领域发挥重要作用。
机器人的运动学是机器人技术中的重要组成部分,其中正运动学和逆运动学是两个重要的概念。
正运动学是指机器人的运动学问题中,已知机器人各关节的角度,求出机器人末端执行器的位置和姿态的过程。
在机器人的正运动学中,需要考虑机器人的结构、关节的类型和数量、关节的运动范围等因素。
正运动学的求解可以通过矩阵变换的方法来实现,其中包括旋转矩阵和平移矩阵等。
逆运动学是指机器人的运动学问题中,已知机器人末端执行器的位置和姿态,求出机器人各关节的角度的过程。
在机器人的逆运动学中,需要考虑机器人的结构、关节的类型和数量、关节的运动范围等因素。
逆运动学的求解可以通过解方程组的方法来实现,其中包括正弦定理、余弦定理等。
机器人的正运动学和逆运动学在机器人技术中具有重要的应用价值。
在机器人的控制系统中,正运动学可以用来实现机器人的位置控制和轨迹规划,逆运动学可以用来实现机器人的姿态控制和路径规划。
在机器人的仿真和设计中,正运动学和逆运动学可以用来验证机器人的运动性能和优化机器人的结构设计。
机器人的正运动学和逆运动学是机器人技术中不可或缺的重要组成
部分,它们为机器人的运动控制和设计提供了重要的理论基础和实践应用。
随着机器人技术的不断发展和应用,正运动学和逆运动学的研究和应用将会越来越广泛。
四足机器人步行腿的运动学正反解
j
学 术 论 丛
N= C O S O 3 ,M = s i n 0 L ,K= s i n t  ̄ , , A= c o s 0  ̄ , E= c o s 0 , = s i n 2 0  ̄ 。 综 合以上各式 ,可得出弹性驱动关节变量值 的现行方程
组为 : 堡: 堡 : : ! 兰 [ ! : : : ! l [ : ! : :
学术论 丛
对州
四足机器人步行腿 的运动学正反解
张 冰
大连大学机械工程学院 大连 1 1 6 6 2 2
Qu a d r u p e d r o b o t wa l k i n g l e g k i n e ma t i c s I n v e r s e
量为 :
A , l 2 。 0 一 l
0
0
『
]
] = 2
0
2 0
p 点 在 固定坐标系中的坐标 I 为:
墨+ s i箪 。 。 岛
Z l + 。 血 。
、 、
置 一 等 s i l 1 亟 n 手 c 0 s q Z 1 - 等 咖 q c o s
i i f v e s o l u t i o n o f t h e p r o b l e m i s mu c h mo r e c o mp l e x t h a n t h e i n - v e r s e s o l u t i o n .Th e a n a l y i t c a l me t h o d it w h h i g h a c c u r a c y ,a nd l a i d he t f o u n d a i t o n f o r wa l k i n g s p a c e or f t h e mo v e me n t o f t h e
足式机器人正逆运动学几何法
足式机器人正逆运动学几何法足式机器人是一种能够模仿人类步行的机器人,它具备多自由度的关节和复杂的运动能力。
为了实现足式机器人的运动控制,正逆运动学几何法被广泛应用。
本文将介绍足式机器人正逆运动学几何法的原理和应用。
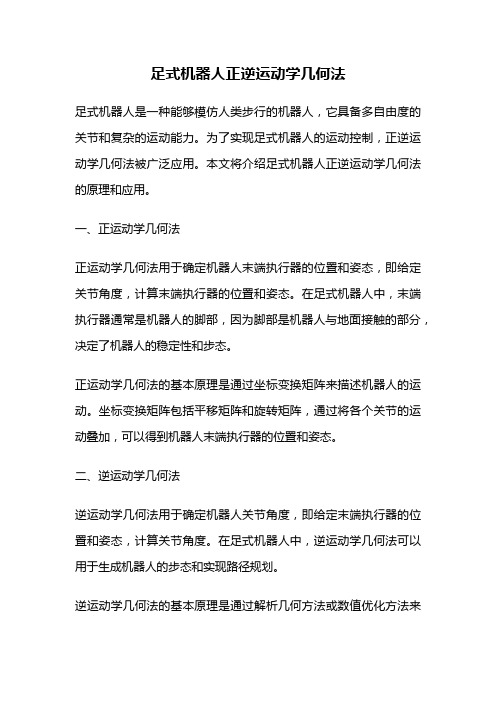
一、正运动学几何法正运动学几何法用于确定机器人末端执行器的位置和姿态,即给定关节角度,计算末端执行器的位置和姿态。
在足式机器人中,末端执行器通常是机器人的脚部,因为脚部是机器人与地面接触的部分,决定了机器人的稳定性和步态。
正运动学几何法的基本原理是通过坐标变换矩阵来描述机器人的运动。
坐标变换矩阵包括平移矩阵和旋转矩阵,通过将各个关节的运动叠加,可以得到机器人末端执行器的位置和姿态。
二、逆运动学几何法逆运动学几何法用于确定机器人关节角度,即给定末端执行器的位置和姿态,计算关节角度。
在足式机器人中,逆运动学几何法可以用于生成机器人的步态和实现路径规划。
逆运动学几何法的基本原理是通过解析几何方法或数值优化方法来计算关节角度。
解析几何方法适用于简单的机器人结构,可以通过几何关系直接计算关节角度。
数值优化方法适用于复杂的机器人结构,通过迭代计算来逼近关节角度的解。
三、应用足式机器人正逆运动学几何法在机器人领域有着广泛的应用。
首先,正逆运动学几何法可以用于机器人的姿态控制和路径规划。
通过给定目标位置和姿态,可以计算出机器人的关节角度,从而实现机器人的运动控制和路径规划。
正逆运动学几何法可以用于机器人的仿真和优化。
通过建立机器人的正逆运动学模型,可以进行机器人的仿真实验,验证机器人的运动性能和稳定性。
同时,可以通过优化算法来改进机器人的运动性能,使机器人的步态更加稳定和高效。
正逆运动学几何法还可以应用于机器人的故障诊断和校正。
通过监测机器人的关节角度和末端执行器的位置,可以判断机器人是否存在故障,并进行相应的校正和修复。
总结起来,足式机器人正逆运动学几何法是实现机器人运动控制和路径规划的重要方法。
它通过计算关节角度和末端执行器的位置和姿态,实现机器人的运动控制和路径规划。
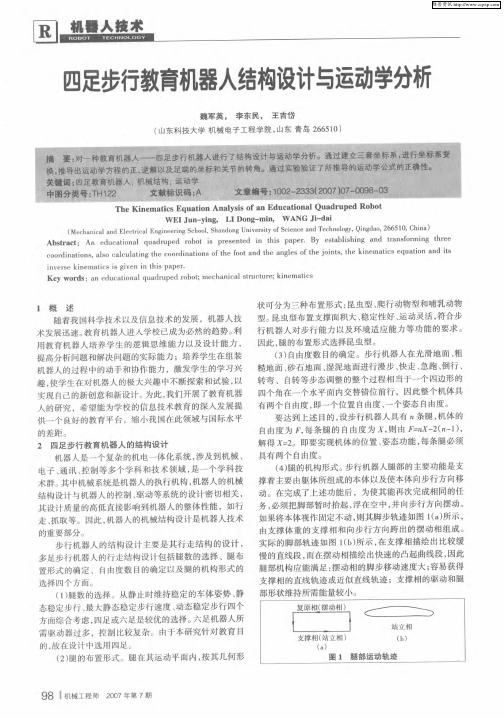
四足步行教育机器人结构设计与运动学分析
网 L
-- _-- _
一
动副, 使其具有与平行连杆相似的特性。 腿部机构的基本形状设计如图 2 所示 ,四足教育机
器人 的整体 结构 设计 如 图 3 所示 。
逆解
由图 4可 知 , 腿 具 单
t 2 t 2
腿 坐标 系与 体 坐标 系之 间的 变换 关 系
设 A 为第 腿在体上圆周布置时的安装角度( 。 即为 与 间的夹角 )A ( 1 :尸 ) 一
把腿机构中的四连杆机构简化为一个关节得 出如图 各 腿坐 标 的原 点在 体 坐标 系下 的坐标 为 : 4所 示 的机 构 模 型 , 立 坐标 系 D Y , 建 坐标 原 点 0
其中 为腿号 , 为腿坐标系原点的分布半径( 见图 5 。 )
() 1 由腿 坐标 系 到体 坐 标系 的变 换
已知一点 c在腿坐标系 中的坐标为( , )则其 %, ,
在 坐 系 的 标 ,,):b Ai 体 标 中 坐 ( 为 f ・ y ‘
=
l 0
( i nA l s ̄ i( )0 D c o + )s +
Z 0 【 1 z=zio+3 iO; 庐 0 2 s + ; n l nt 2 = i y c Z s I ;O
() 2 逆解
际工作要求转换 为各个关节 的转动角度( 或移动位移 ) 进
行运 动学 分 析 。
3J 建 立 坐标 系 .
逆解 即由已知足端位置求解各关节转角 。由其正解
有 3个 自由度 , 3个关节
角分 别 为 O O, , 由 于 il 但 ,
第 3个 关节 只是 四连杆 机 构的简化 , 且长腿始终 与水平面垂 坐 标 系下 的位 且 i 0] i = 。
四足机器人运动规律
四足机器人运动规律
四足机器人的运动规律涉及到机器人的步态、步幅、速度、方向控制等方面。
下面是一些关于四足机器人运动规律的基本知识:
1.步态:四足机器人的步态通常有三种类型:行走、奔跑和跳跃。
行走步态是最基本
的步态,通过交替移动四条腿来实现机器人的前进。
奔跑步态是一种更快的行走步
态,通过加快步频和增大步幅来实现。
跳跃步态则是通过同时用后腿蹬地来实现机
器人的跳跃。
2.步幅:步幅是指机器人每一步的长度。
步幅可以通过控制腿部关节的角度和力量来
调整。
较大的步幅可以使机器人更快地移动,但也会增加能量消耗和稳定性的挑战。
3.速度:四足机器人的速度可以通过调整步频和步幅来控制。
增加步频和步幅可以使
机器人更快地移动,但也需要更多的能量和更高的控制要求。
4.方向控制:四足机器人可以通过调整腿部关节的角度和力量来控制移动方向。
例如,
通过向左调整左侧腿部关节的角度,可以使机器人向左转向。
四足机器人步态及运动控制

发展阶段
随着科技的进步,尤其是计算机技 术和机械设计的发展,四足机器人 在20世纪90年代进入快速发展阶 段。
创新阶段
近年来,随着人工智能和深度学习 技术的突破,四足机器人的智能化 程度越来越高,性能和应用领域也 得到了极大的拓展。
四足机器人的分类及特点
根据驱动方式
四足机器人可以分为液压驱动、气压驱动和电动驱动等类型。液压驱动具有负载能力强、精度高的优点,但易受 环境温度影响。气压驱动具有速度快、响应灵敏的优点,但易受气压波动影响。电动驱动具有节能环保、维护方 便的优点,但需要良好的电源管理系统。
步态选择的原则与影响因素
选择四足机器人的步态应根据具 体的应用场景和需求进行考虑。
原则上,应考虑机器人的运动效 率、稳定性、灵活性和适应性等
方面的需求。
影响因素包括机器人的重量、负 载、能源供应、环境条件等。
03
四足机器人的运动控制方 法基于模型ຫໍສະໝຸດ 控制方法模型预测控制(MPC)
利用机器人的动力学模型进行预测和控制,考虑了机器人运动的各种约束条件 ,如速度、加速度、关节角度等,以达到最优的控制效果。
基于学习的控制方法
深度学习控制
利用深度学习算法,通过对大量数据进行学习,让机器人能够自适应各种复杂的 未知环境。
强化学习控制
通过强化学习算法,让机器人在实际环境中通过自我试错进行学习,从而找到最 优的控制策略。
04
四足机器人的步态及运动 控制实验
四足机器人实验平台介绍
实验平台组成
四足机器人实验平台主要由机械系统、控制系统、感知系 统三部分组成。
混合步态则结合了静态和动态步态的 特点,以实现机器人的特定运动需求 。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
四足机器人步行腿的运动学正反解摘要:本文设计的步行腿具有3个驱动关节,分析了该步行机器人的机构及其等效简化,给出了运动学正反解,正解问题要比反解问题复杂很多。
该分析方法准确率高,为步行腿的运动空间、轨迹规划和位置控制奠定了基础。
关键词:步行腿运动学正反解
abstract: in this paper, the design of walking legs with three drive joint analysis of the institutions of the walking robot and its equivalent simplified kinematics and inverse solution positive solution of the problem is much more complex than the inverse solution. the analytical method with high accuracy, and laid the foundation for walking space for the movement of the legs, trajectory planning and position control.
keywords: walking legs kinematics positive and negative solution
0 前言
四足机器人的行走机构是步行腿,它是步行机器人中最为重要也是最复杂的构件[1],步行腿的灵活度这届决定了步行机器人的行走姿态和完成任务的复杂程度。
本文设计的步行腿具有三个驱动关节,采用混连机构设计。
给出了步行腿的运动正解和反解,是整个四足步行机器人系统设计的基础,也是机器人运动空间分析和尺
寸设计的关键所在[2]。
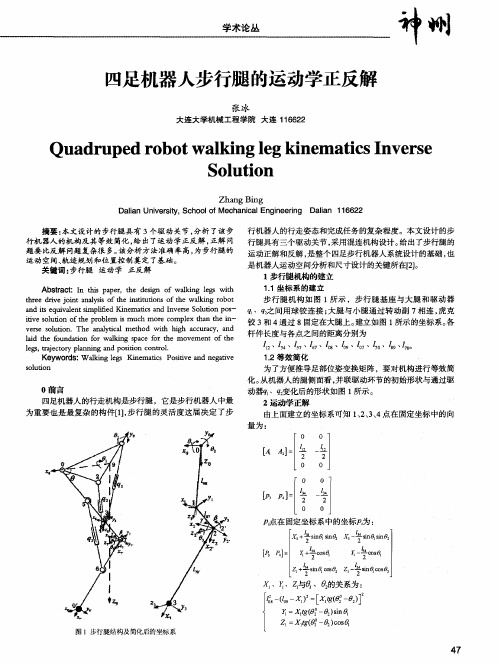
1 步行腿机构的建立
1.1 坐标系的建立
步行腿机构如图1所示,步行腿基座与大腿和驱动器■之间用球铰连接;大腿与小腿通过转动副7相连,虎克铰3和4通过8固定在大腿上。
建立如图1所示的坐标系。
各杆件长度与各点之间的距离分别为
■。
1.2 等效简化
为了方便推导足部位姿变换矩阵,要对机构进行等效简化。
从机器人的腿侧面看,并联驱动环节的初始形状与通过驱动器■变化后的形状如图1所示。
2 运动学正解
由上面建立的坐标系可知1、2、3、4点在固定坐标中的向量为:■
■点在固定坐标系中的坐标■为:
■
■与■的关系为:
■
联立上述两式,可得,
■
综上所述,得到其运动学正解方程为:
■
根据关节变量的值,就可以求出最后的位置坐标。
3 运动学反解
如图1所示,■和■之间的关系为:
■
将上式后两项相除,前两项求平方和可求得■:
■
为方便计算,令
■。
综合以上各式,可得出弹性驱动关节变量值的现行方程组为:■
通过求解该线性方程组,可以求出关节变量■的数值。
4 结论
通过建立四足机器人步行腿的位置坐标,给出了正反解的求解公式。
虽然求解公式略显复杂,却是现有条件下最精确的求解方法[3]。
参考文献
[1] 马东兴.四足机器人步态规划与仿真[d].南京航空航天大
学硕士论文,2010
[2] 张文宇.四足机器人斜面全方位静态步行及稳定性分析[d].中国海洋大学硕士论
文.2009
[3] 陈学东,孙翎,贾文川.多足步行机器人运动规划与控制[m].武昌,华中科技大学出版社,2006:1-71
作者简介:张冰,男,1989年出生,本科生,主要研究方向为机械原理。