根据系统结构图绘制信号流图
2011-2结构图与信号流图
(3)混合节点
既有输入支点又有输出支点的节点称为混 合节点。
(4)通路
从某一节点开始,沿支路箭头方向经过各 相连支路到另一节点(或同一节点)构成的路 径,称为通路。通路中各支路传输的乘积称为 通路传输(通路增益)。
40
(5)开通路 与任一节点相交不多于一次的通路称为开通路。 (6)闭通路 如果通路的终点就是通路的起点,并且与任何 其他 节点相交不多于一次的通路称为闭通路或称为回环。 (7)回环增益 回环中各支路传输的乘积称为回环增益(或传 输)。
45
1 1
2 1 La 1 be
T11 T2 2 1 2 T Tk k k 1 abcd fd (1 be) 1 be ( f abc bef ) dg
46
例2-15
xc xc x1 x1 求:Tr ,T y ,Tr1 ,T y1 xr y xr y
……
Lm
——m个互不接触回环的传输乘积之和; k ——称为第k条通路特征式的余因子,是在
中除去
第k 条前向通路相接触的各回环传输(即将其置 零)。
44
例 2-14
T1 abcd , T2 fd
1 L1 L2 1 ( La Lb Lc ) La Lc 1 be abcdg fdg befdg 1 be ( f abc bef )dg
对于单位反馈系统,有 X c ( s) WK ( s) WB ( s) X r ( s) 1 WK ( s)
34
5.系统对给定作用和扰动作用的传递函数
原则:对于线性系统来说,可以运用叠加原理, 即对每一个输入量分别求出输出量,然后再进行 叠加,就得到系统的输出量。
自动控制理论结构图和信号流图
R1C2 s
ui ( s )
-
-
1
R1
1
C1sห้องสมุดไป่ตู้
u (s)
1 R2C2 s 1
uo ( s )
② 16
结构图等效变换例子||例2-11
R1C2 s
ui ( s ) -
1
R1
1
C1s
u (s)
1 R2C2 s 1
uo ( s )
③
R1C2 s
uo ( s )
④
ui ( s ) -
1 R1C1 s 1
[注意]: 相临的信号相加点位置可以互换;见下例
X 1 ( s) X 2 ( s)
Y ( s)
X 1 ( s)
X 3 (s)
Y ( s)
X 3 (s)
X 2 ( s)
13
比较点和分支点的移动和互换
同一信号的分支点位置可以互换:见下例
X 1 ( s)
X 2 ( s)
X ( s)
Y ( s ) G (s)
u (s) I ( s) 1 C1s
-
1
R1
I1 ( s )
I 2 ( s)
1 u ( s) C1s 1 [u ( s) uo ( s)] I 2 ( s) R2 I (s) 1 I 2 ( s) uo ( s ) C2 s
u (s)
1 R2
uo ( s )
1 C2 s
I 2 ( s)
[例2-11]利用结构图等效变换讨论两级RC串联电路的传递函数。 R1 R2
ui
i1
i, u
C1
i2
控制系统结构图与信号流图
控制系统结构图与信号流图
1
提纲:
❖ 一 、控制系统的结构图 ❖ 二、控制系统的信号流图 ❖ 三、控制系统的传递函数
2
引言:
求系统的传递函数时,需要对微分方程组 或经拉氏变换后的代数方程组进行消元。而 采用结构图或信号流图,更便于求取系统的 传递函数,还能直观地表明输入信号以及各 中间变量在系统中的传递过程。因此,结构 图和信号流图作为一种数学模型,在控制理 论中得到了广泛的应用。
J s2 Bs
(f)
Eb (s) Kesm (s) (g)
c
(s)
1
i
m
(s)
(h)
图2-27 式(2.80)(e)~(h)子方程框图
10
按系统中各元件的相互关系,分清各输入量和输出量, 将各结构图正确地连接起来(图2-28)。
图2-28 位置随动系统结构图
11
略去La,系统结构图如图2-29所示:
8
Ia
(s)
U
a (s) La s
Eb (s) Ra
(2.80)(a)
e(s) r(s)c(s)
(b)
Us(s) Kse(s)
(c)
Ua (s) KaU s (s)
(d)
图2-27 式(2.80)(a)~(d)子方程框图
9
M d (s) KmIa (s) (e)
m(s)
M d(s) M L(s)
3
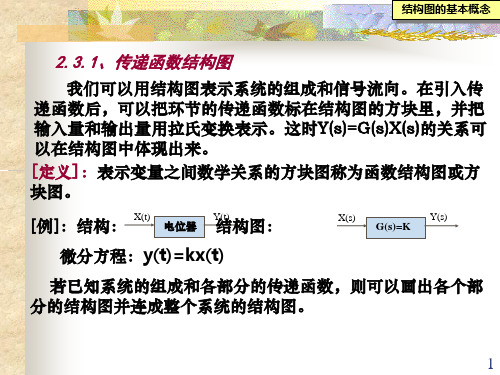
一 、控制系统的结构图
(一 )结构图的概念 图2-24 RC网络的微分方程式为:
1
ur Ri C idt
uc
1 C
idt
也可写为:
uc
1 C
ห้องสมุดไป่ตู้ idt
结构图与信号流图
(5) 引出点的移动
(1) 引出点前移
R (s)
G (s )
C (s)
C (s)
C(s) = R(s)G(s)
R (s)
G (s ) G (s )
C (s) C (s)
C(s) = R(s)G(s)
(2) 引出点后移
R (s) G (s )
C (s) R (s)
R (s ) -
G 1(s )
C (s)
G 23 (s )
HH11((ss))
G23(s) =
1+
G 2(s )G 3(s )G 4 (s ) G3(s)G4(s)H 3(s) + G2(s)G3(s)H 2(s)
F(s) = C (s) =
G 1(s )G 23 (s )
R (s) 1 + G1(s)G23(s)H1(s)
2-3 结构图与信号流图
引言 一、结构图的基本单元和等效规则 二、信号流图的组成和性质 三、信号流图的绘制 四、Mason公式 五、闭环系统的传递函数
1
引言
何谓结构图
由单向运算框图和信号流向线组成的描写一般系统中 信号传递关系的定量分析图形。
何谓信号流图 由单向增益支路和节点运算框图和信号流向线组成的
V3 dV1 kV2
f
m
Ⅰ
b
l
Ⅱ
V3
k
Ⅲ
h
Ⅳ
C
V1 d Ⅴ e V2 1
g
以R为输入,V2为输出则可整理成下列方程
1 m 0 l V1 b
g
1 h
e V2
f
R
d k 1 V3 0
控制系统结构图与信号流图

如图2-39所示。n个传递函数依次串联的等效传递函数, 等于n个传递函数的乘积。
(2)并联连接的等效变换 G1(s)与G2(s)两个环节并联连接,其等效传递函数等于
该两个传递函数的代数和,即:
G(s)= G1(s)±G2(s)
(2.82)
等效变换结果见图2-40(b)。
18
图2-40
n个传递函数并联其等效传递函数为该n个传递函数的代 数和,如图2-41所示:
5
图2-25 RC网络的结构图
结构图:根据由微分方程组得到的拉氏变换方程组,对 每个子方程都用上述符号表示,并将各图形正确地连接 起来,即为结构图,又称为方框图。
结构图也是系统的一种数学模型,它实际上是数学模型 的图解化 。
6
(二)系统结构图的建立 建立系统的结构图,其步骤如下: (1)建立控制系统各元部件的微分方程。
图2-29 La=0的位置随动系统结构图
12
例2.2 试绘制图2-30所示无源网络的结构图。
图2-30 例2.3网络图
图2-31 例2.3网络的结构图
解:ur为网络输入,uc为网络输出。
一个系统的结构图不是唯一的,但经过变换求得的总 传递函数都应该是相同的。上例所示网络的结构图还可 用图2-32表示。
第四节
控制系统结构图与信号流图
1
提纲:
❖ 一 、控制系统的结构图 ❖ 二、控制系统的信号流图 ❖ 三、控制系统的传递函数
2
引言:
求系统的传递函数时,需要对微分方程组 或经拉氏变换后的代数方程组进行消元。而 采用结构图或信号流图,更便于求取系统的 传递函数,还能直观地表明输入信号以及各 中间变量在系统中的传递过程。因此,结构 图和信号流图作为一种数学模型,在控制理 论中得到了广泛的应用。
自动控制
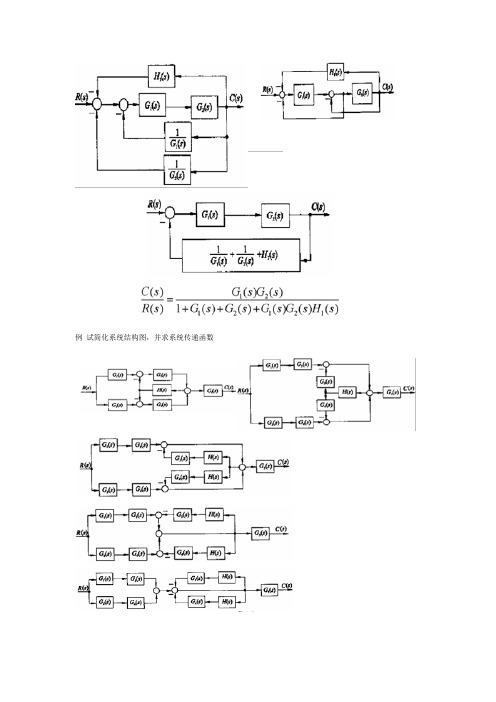
例试简化系统结构图,并求系统传递函数3、信号流图的组成及性质(1)、信号流图的组成:由节点和支路组成的一种信号传递网络。
A、节点:即变量,用小圆圈表示,为流向该节点的信号的代数和。
B、支路:定向线段,标支路增益,相当于乘法器,表因果关系。
(2)、信号流图的性质A、节点标志系统的变量;B、支路相当于乘法器;C、信号沿箭头单向传递;D、系统的信号流图不是惟一的。
下图为典型的信号流图(3)、常用术语源节点(或输入节点):只有输出支路而没有输入支路的节点,如图中的节点X1 。
阱节点(或输出节点):只有输出支路而没有输入支路的节点,如图中的节点X5 。
混合节点:既有输入支路又有输出支路的节点,如图中的节点X2X3X4X5。
前向通路:信号从输入节点到输出节点传递时,每个节点只通过一次的通路。
从源节点X1到阱节点X5,共有两条前向通路:一条是X1->X2->X3->X4->X5,其前向通路总增益P1=abc;另一条是X1->X2->X5,其前向通路总增益P2=d。
回路:起点和终点在同一节点,而且信号通过每一节点不多于一次的闭合通路。
X2->X3->X2,其回路增益L1=ae,X3->X4->X3其回路增益L2=bf;X5->X5 的自回路,其回路增益是g。
不接触回路:回路之间没有公共节点时,这种回路叫做不接触回路。
一对X5->X5 是和X2->X3->X2;另一对是X5->X5和X3->X4->X3。
4、信号流图的绘制(1)由系统微分方程绘制信号流图微分方程先拉氏变换,指定系统变量,按因果关系排列,连成信号流图。
下面结合示例说明:例试绘制RC无源网络的信号流图。
设电容初始电压为U1(0)。
解由基尔霍夫定律,列写微分方程式如下:各微分方程式进行拉氏变换,则有对变量Ui(s),Ui(s)-U0(s),I1(s),I2(s),I(s),U0(s)及U1(0)分别设置七个节点;然后,用相应增益的支路将个节点连接起来,便得到RC无源网络的信号流图。
自动控制原理第2章(2)
(3) 按信号流向将各框图连起来
Ur(s) + _ I1(s) 1/R1
Uc(s)
华中科技大学文华学院机电学部 自动控制理论
控制系统的结构图与信号流图
方框图等效变换 基本连接方式:串联、并联、反馈 基本连接方式:串联、并联、
1.串联方框的等效变换 1.串联方框的等效变换
R(s) C(s) G1(s) G2(s) R(s) C(s) G1(s) G2(s)
华中科技大学文华学院机电学部 自动控制理论
控制系统的结构图与信号流图
例3 试化简如下系统结构图,并求传递函数C(s)/R(s) 试化简如下系统结构图,并求传递函数C(s)/R(s)
H2(s) R(s)
_ _
G1(s)
G2(s)
_
G3(s) H3(s)
G4(s)
C(s)
H1(s)
解:①将G3(s)输出端的分支点后移得: (s)输出端的分支点后移得: 输出端的分支点后移得
x1 = xr gxc x2 = ax1 fx4 x3 = bx2 exc x4 = cx3 xc = dx4
xr x1
a x2 b -f
x3 c
-g
x4 d
-e
xc
华中科技大学文华学院机电学部 自动控制理论
控制系统的结构图与信号流图
2、由系统结构图绘制信号流图 在结构图的信号线上用小圆圈标志出传递的信号, ①在结构图的信号线上用小圆圈标志出传递的信号,得到节点 用标有传递函数的线段代替结构图中的方框, ②用标有传递函数的线段代替结构图中的方框,得到支路
G(s) H(s)
R(s)
C(s) G(s) 1m G(s)H(s)
化简一般方法:移动分支点或相加点 化简一般方法: 交换相加点 合并
控制系统的结构图与信号流图
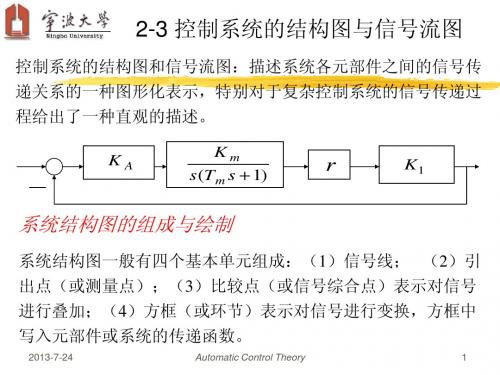
控制系统的结构图和信号流图:描述系统各元部件之间的信号传 递关系的一种图形化表示,特别对于复杂控制系统的信号传递过 程给出了一种直观的描述。
KA
Km s (T m s 1)
r
K1
系统结构图的组成与绘制
系统结构图一般有四个基本单元组成:(1)信号线; (2)引 出点(或测量点);(3)比较点(或信号综合点)表示对信号
Automatic Control Theory 2
M s C M U a (s )
2013-7-24
绳轮传动机构: L( s ) r m ( s )
测量电位器:
E (s)
E 2 ( s ) K 1 L( s )
M s (s)
CM
U a (s )
E1 ( s )
m (s) L (s )
2013-7-24 Automatic Control Theory 14
•回路 起点和终点同在一个节点上,而且信号通过每个节点不多 于一次的闭合通路(单独回路)。 •不接触回路 回路之间没有公共节点时,该回路称为不接触回路。
信号流图的绘制
(1)由微分方程绘制信号流图: RC串联电路的信号流图
u r (t ) i1 (t ) R1 u c (t ) u c (t ) i (t ) R2 1 i2 (t ) dt i1 (t ) R1 u1 (t ) C i1 (t ) i2 (t ) i (t )
之间的所有传递函数之乘积,记为 H(s)
开环传递函数:反馈引入点断开时,输入端对应比较器输出 E(s)
到输入端对应的比较器的反馈信号 B(s) 之间所有传递函数的乘 积,记为GK(s), GK(s)=G(s)H(s) E (s) C (s)