随钻陀螺仪在丛式井网防碰中的应用
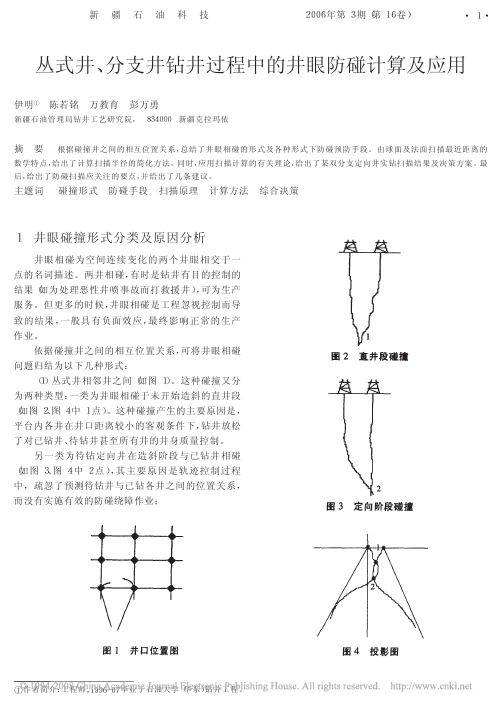
丛式井_分支井钻井过程中的井眼防碰计算及应用
6.1 问题的产生
XX 分支井为一口试验井, 设计的井身结构见图 11。
Φ339.7mm 套管×100m
Φ244.5mm 套管×1 403m
套管开窗位置 1 302m
Φ139.7mm 套管×1 670m
Φ177.8mm 套管×1 717m
图 11 分支井井身结构示意图
设计的分支井眼剖面见表 1。 但是, 主井眼完成后, 侧钻分支井眼至井深 1 324m 后测量发现, 实钻分支井眼 1 302~1 324m 井 段井眼方位( 302°) 与设计分支 井 眼 闭 合 方 位 ( 150°) 两者存在近 150°偏差( 如图 12) , 且其轨迹水平投影
基本原理如图 8 所示, 即以参考点为球心, 做半 径不同的无数同心球, 其中与对比井刚好接触的球的 半径即为两井最近距离, 也称为扫描半径 (如图中
·4·
新疆石油科技
N
M' P`
O
E
2006 年第 3 期( 第 16 卷)
N P'
P
M
Q
对比井
θ M'
H
E
参考井
图 8 邻井球面距离扫描空间示意图
MP)。其水平投影方向与参考井的高边方向的夹角( 顺
利用扫描半径在实际计算中, 若能够找出距离最
小对应点的井深, 则可利用空间两点距离计算、连线
与正北方向夹角的有关公式, 计算获得扫描半径与扫
描夹角。
若以 参 考 井 HM 垂 深 对 应 的 比 较 井 井 深 LQ 为 基 点, 取步长 n( 为相对提高精度, 可取 0.1m) , 结合对应
的扫描原理, 向对比井井深减小方向逐点计算( 即不
4 防碰扫描原理
防碰扫描是在钻井过程中预防井眼碰撞, 进行科 学决策的基础。该技术发展到今天, 已形成了基于最 小曲率半径法计算单井轨迹参数, 结合不同的扫描原 理而发展起来的最近距离扫描、法面距离扫描以及平 面距离扫描等方法。
丛式井组总体防碰优化技术及应用_赵飞宇

丛式井组总体防碰优化技术及应用赵飞宇(胜利油田黄河钻井五公司山东东营257000)摘要:针对丛式井组井间距小、钻井数量多、井间防碰难度大的技术特点,利用观察法结合系统科学方法,对平台与钻机整拖方向、目标点与井口位置、各目标井方位关系等进行了系统研究,以胜3-斜573井组为例,分析防碰控制不利因素的基础上,根据油藏特点与布井规律分析防碰措施,结合平台自身特点确定防碰预案,最终得到既满足油藏要求、又满足钻探目的的钻井技术,为以后钻井方案提供了科学依据。
关键词:丛式井组;防碰;防碰因素;防碰措施丛式井组开发可节约大量的道路建设、井场建设投资,节省地面空间,便于采油集中建站和管理,对开发浅海、滩涂、市区等油田具有广阔的应用前景。
目前,胜坨老油田区块均已开采多年,地面条件与地下条件常常限制区块开发方案的整体实施,为了满足特殊油藏整体开发的部署要求,需要采取丛式井组钻井方式获取目标层位。
随着钻井技术水平的日益提高,钻井所能探及的区域半径日益增大,在地面条件与地下条件受限的情况下,密集型丛式井组渐渐成为主要的丛式井组开发方式。
一、钻井顺序排列规律分析多平台同时开发时,采取就近原则,在满足油藏对开发顺序要求的前提下,各平台控制井之间平面轨迹尽量不交叉。
1.平台与部署井相对位置关系若平台位于部署井一侧开发时,部署井钻井顺序走向尽量与钻机整拖方向一致。
2.钻机整拖方向与各井方位间的相对关系丛式井组一般利用造斜点相互错开的方式实现各井间防碰。
当目的层位相同时,水平位移大的井造斜点浅,水平位移小的井造斜点深,通常推荐的钻井施工顺序优化原则是:先钻水平位移大、造斜点浅的井,后钻水平位移小、造斜点深的井。
3.目的层相同的两井,方位及水平位移相近时的排列规律当相邻两井目的层相同、方位相近、水平位移也相近时,无法利用造斜点错开的方式解决井间防碰问题。
二、丛式井防碰因素1.客观因素大平台、小井距、高密度丛式井的作业方式在观上增加了防碰风险,表层、直井段偏斜(0.5°井斜在200米的井段连续偏移达到0.65米,300米偏移0.95米)表层测量数据误差,多点受磁干扰影响,方位不准确测量数据不全、不准,个别测量数据失常油藏的特殊要求。
随钻陀螺GyroSphere在渤海油田浅层防碰作业中的应用

1 引言随着海上油气田勘探开发的深入,井网密集程度越来越高。
以渤海为例,通常丛式井槽口间距不足2米,邻井套管产生的磁场干扰使得随钻磁性测量工具方位测量不准确,无法准确判断隔水管及浅层直井段的偏斜方向,极有可能引发井眼碰撞风险。
目前渤海地区一般采用有线陀螺表层定向加复测套管轨迹的作业模式确保井眼轨迹的准确,时效较低。
随钻陀螺GyroSphere提供了另外一种解决方案,使井下钻具具备钻进的过程中准确测量井眼轨迹的能力,有助于指导更精确的防碰绕障作业施工,切实有效提高了作业时效和安全性。
2 GyroSphere 工具介绍2.1 GyroSphere 工具简介斯伦贝谢随钻陀螺GyroSphere采用MEMS(微电子机械系统)陀螺测斜技术,显著提高了陀螺测斜的效率,提高测量准确度,相比较于有线陀螺,可大大减少作业所需的时间。
MEMS技术利用内部的一个微型振动结构来确定行星旋转的速度,如图1所示,根据这个旋转速度来确定井斜、方位以及工具面方位数据。
图1 GyroSphere工具结构图GyroSphere可提供:(1)静态测斜:方位、井斜、静止惯性工具面(2)连续测量 (滑动钻进):实时连续惯性工具面(3)其他:维度、地球转速、Total G2.2 GyroSphere 工具测量步骤GyroSphere使用锂电池供电,停泵后工具进入电池供电模式,首先进入30秒的自检时段,随后进入测斜采样时段(每2分钟测得一个测斜,每组测斜采样10次,采样次数可根据测斜成功率地面设置调整)。
测完后,工具自动停止测斜采样。
开泵进入MWD涡轮发电供电模式,工具将自动选择测斜采样时得到的测斜数据及获取的10组数据中有几个Good Survey及几个Bad Survey,通过随钻陀螺GyroSphere在渤海油田浅层防碰作业中的应用桑晓高 蒲小亮 安晓会 白旭峰中海油田服务股份有限公司 天津 300459摘要:随着渤海油田勘探开发的不断深入,平台槽口数量的不断增多,布井密度急剧增加,再加上隔水管及直井段偏斜的影响,大大增加了浅层碰撞套管的风险,防碰形势日益严峻。
丛式井组总体防碰与钻井顺序优化技术及应用研究

206所谓从式井,指的是在平台或者井场上,将几个到几百个井钻出来,每个井口的距离只有数米,每个井底都会朝着不同的方向延伸。
从式井井口通常在有限的范围里集中,如人工岛、沙漠钻井平台及海上钻井平台等,这使得丛式井组经常遇到碰撞问题。
因此,研究优化丛式井组的钻井顺序、防碰的技术与应用具有一定现实意义。
1 丛式井组概况某丛式井组在鄂尔多斯盆地黄土梁峁区某山梁上,地表系第四系未固结的松散黄砂土,承压强度小。
该丛式井组附近的地层发育齐全,延长组是其开发的主要目的层,储层平均孔隙度为8.0%,平均渗透率为0.29mD,属特低孔超低渗储层。
部署的新钻井一共有13口,开发时采用单台控制,构建陆地钻井平台,其特点是井位密集、井数量多,要想使该丛式井组得到科学的滚动开发,就必须优化其钻井顺序与防碰。
2 优化丛式井组的钻井顺序、防碰的技术与应用(1)优化思路。
应在总体的角度考虑钻井顺序、防碰的优化工作,明确平台具体数量和位置以后,先考虑防碰、钻井顺序的各种影响因素,应包括获取目标层位、平台走向、区块条件、布井方位等因素,然后再按照总体优化的基本原则展开相应的优化工作。
(2)优化内容。
第一,应优化井身轨道的设计可行性和科学性。
第二,应优化井位后期的调整可行性。
第三,应优化采油作业中,不同开发层在泵挂深度上的具体要求。
第四,应优化油藏的开发顺序,让储层与储量得以充分落实[1]。
第五,应优化每口井和钻机整拖方向的关系。
第六,应优化井位置和平台位置的部署关系。
按照钻井要求与部署特点等具体情况,深入考虑和分析影响防碰的因素影响,依照优化基本原则,在整体上明确防碰优化设计方案,尽可能降低负面因素产生的影响,增强施工的安全性。
而且应借助分析计算软件来优化井眼轨道,按照轨道参数合理性与防碰扫描结果,对钻井的顺序展开持续不间断的调整,最后总体明确钻井的最佳顺序。
实施方案时,还应按照油藏特点有效落实靶点方位,然后根据优化的整体方案再次调整和优化钻井顺序,一直到平台施工全面完成位置,从而符合油藏的储层落实需求,实现钻井顺序优化。
陀螺仪在井下贯通施工中的应用 张俊雷

陀螺仪在井下贯通施工中的应用张俊雷发表时间:2018-05-23T17:08:26.080Z 来源:《基层建设》2018年第7期作者:张俊雷[导读] 摘要:在竖井联系测量中,由于井下滴水较多,加上井较深等因素的影响,投点误差较大,影响了定向精度。
山东黄金矿业(莱州)有限公司三山岛金矿山东莱州 261442摘要:在竖井联系测量中,由于井下滴水较多,加上井较深等因素的影响,投点误差较大,影响了定向精度。
使用陀螺仪定向,具有定向精度高、作业时间短、不受井筒条件限制、与施工干扰小、工作组织简单和工作效率高等优点,而且,陀螺仪可在井下导线上任意点进行定向,避免了测角造成的误差积累。
本文围绕全站仪“三架法”结合陀螺定向在矿山贯通测量中的应用进行了分析。
关键词:陀螺仪;矿山;测量测量误差是矿山测量工作中不可避免的问题,而受到误差累积的影响,长距离贯通测量一直以来都是矿山测量的难点和重点。
在进行矿山长距离贯通作业中,最常使用的就是全站仪“三架法”结合陀螺定向法。
经大量贯通实践表明,该方法大大提高了矿山贯通精度。
一、某矿山已经完成GNSS控制点的建立某矿山已经完成GNSS控制点的建立和斜井联系测量工作。
该贯通工程为两井大型贯通测量,井下贯通距离为4.9km,一共分布36个导线点,导线边长为25-360m,最短边在25m 以上,均长为136m。
井下巷道测量以导线精度要求为准。
根据规定,贯通相遇点在水平重要方向和高程方向上的偏差分别不超过0.5m 和0.2m。
2、全站仪“三架法”应用。
为了确保井下导线可靠,通常情况下都会选择“Z”形进行布设。
从图中我们能够看出,一共包含七个支导线点,假设B 为井下贯通导线平面起算点和高程起算点,那么B-A 则为起算方位,需要将全站仪放置在B 点,将棱镜分别放置在A点和C 点,在将这三点整平完毕之后,测量人员就可以进行观测工作。
完成B 点的观测之后,迅速将全站仪从B 点拔出,并及时安置在C 点。
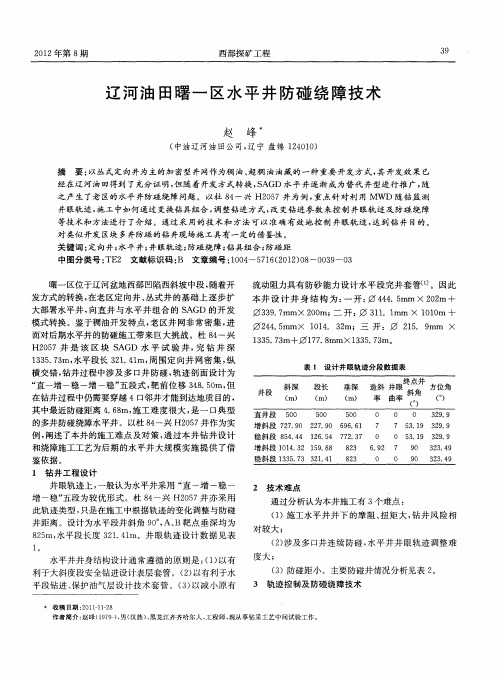
辽河油田曙-区水平井防碰绕障技术
井( )m离) ( … 这也是施工 中的一个最关键 的绕障。通过采用 MWD 深) 深)( 鬻) “ m ( m位 垂 。
N( m
进 行井 眼轨迹 监控 发现 , 虽然 绕障成 功但井 眼轨 迹偏离
了设计 方位 , 时 轨 迹 方 位 角 为 2 0。 此 时改 用 钻 具 此 4。
1 3 . 3 + 1 7 8 n x 3 5 7 m 。 5 7m 3 7 . mi 13.3
25 9 m × 1. r a
13 .3 水平段 长 31 4m, 围定 向井 网密 集 , 35 7m, 2. 1 周 纵 横 交错 , 钻井 过程 中涉 及 多 口井 防 碰 , 轨迹 剖 面 设计 为
水平 井 段 采用 的钻 具 组合 为 : 『1. mm 钻 头 + j 25 9 2 15 6mm的 1 弯螺 杆 4 MWD定位 接头 + j1 5 。 单 - 2 6 mm 『
无 磁 钻 铤 + 17 2 mm 加 重 钻 杆 + 1 7 2 mm 斜 坡 钻 杆 +
20 时井 斜角基 本 为 0。二 开采 用 钟摆 钻具 组 合 为 : 0m 。
铤 + 1 7 钻 杆 。同时 采用 了滑 动定 向钻 进 和复合 2 mm 钻 进方 式 , 直 钻 至 8 0 井 眼 轨 迹 方 位 角 调 整 回 一 6 m, 3 1, 3 。此时轨 迹井 斜角 为 5 。 6 。成 功 绕过 杜 8 —4 —7 4 5 3
井, 防碰井 距 5 8 . m。之 后继 续钻 进顺 利 钻至 1 1m 进 06
* 收 稿 日期 :0 i1—8 2 1- 12
()防碰距 小 。主要 防碰井情 况分 析见表 2 3 。
3 轨 迹控 制及 防碰绕 障技 术
YST-48R无线随钻仪在超密集丛式井组中的应用

能提 高井眼轨迹的控制精度和钻井的速度效益。 本 文通过该仪 器在埕 岛油 田某超 密丛式井组施工情况分析 , 总结 出了一 系列施 工经验 , 为石油 钻 井提速 、 提效 , 降低 生产成本 , 有效规避风险 以及提 高测量成功率提供技 术支持 。 【 关键词 】 随钻测量仪 ; 磁干扰 ; 丛式井
在钻具水 眼内居 中 : 可根据施工需要 . 加装伽马短节 和电阻率短节 , 满 足水 平井地质导 向的施 工 : 该仪器定 向探管使用 石英 加速度计 , 测量 精 度高 . 抗干扰能力强 : 该仪器配有专 用打捞设备 , 当井下 出现 卡钻 、 井漏 等事故 时. 可及时将仪器取 出, 减少损失 。 1 _ 3 Y S T 一 4 8 R主要性 能指标 定 向探管 的井 斜 0 - 1 8 0 。 ( ± 0 . 1 。 ) , 方位 0 - 3 6 0 。 ( ± 1 . 0 。 ) , 工具面 0 — 当. 配件 冲刷情况并不严重 . 没有 出现配件报废 的情 况 B) 磁干扰 问 题 。在 C B 2 5 6 A 一 2 井 的设 计中 ,前期 已桩入 2 O 根隔水管 .每根深度 7 3 . 5 m 。该井设计 造斜点 1 1 0 m. 从临井数据表和井 口布置方式 图可看 出: C B 2 5 6 A 一 7 井与 C B 2 5 6 A 一 2井间距 5 . 6 9 m. 根 据经验 . 这个距 离套 管 和 隔水 管 不 会 对 C B 2 5 6 A一 2井 表 层 预 定 向施 工 造 成 磁 干 扰 : C B 2 5 6 A 一 6 井与 C B 2 5 6 A 一 2 井 间距 3 . 6 m. 此距离将会 对仪器造成轻微 磁干扰 : C B 2 5 6 A 一 1井与 C B 2 5 6 A 一 2井 间距 4 . 0 3 m. 此距离 造成 的磁干 扰 也不会 对其 造 成太 大的影 响 : C B 2 5 6 A 一 2 井 隔水 管对 其造成 磁 干 扰 Y S T 一 4 8 R仪器测点距离钻头 1 3 . 8 m. 加上经验数据 3 . 5 m和隔水管 深度 7 3 . 2 m, 预计 在井深 9 0 m后 . 磁干扰会消除 在 C B 2 5 6 A 一 2 井施工 中. 从仪器测得 的磁 干扰情况可看 出. 在钻至 I 1 3 . 3 I a r . 仪 器测量深度 9 9 . O l n时 , i 仪器所处磁环境 良 好, 可以满足定 向测量 的要 求。此 时与 设计造斜点 】 l o e r . 仅落后 3 _ 3 1 m. 对现场施工影响不 大 . 比预计 磁干扰 消失 的井深落后了 2 0 m
渤南油田老区加密丛式井防碰控制技术

渤南油田老区加密丛式井防碰控制技术1. 引言1.1 研究背景渤南油田老区是中国石油集团渤海油田公司所属的一个重要油田,其开发历史悠久,油井数量众多。
随着油田的逐渐老化,很多油井出现了较大的安全隐患,其中包括丛式井防碰控制问题。
丛式井是一种特殊的油井类型,具有多口井眼在同一井筒中的结构,容易发生井身碰撞等安全问题。
由于丛式井在渤南油田老区的广泛应用,丛式井防碰控制技术显得尤为重要。
当前,针对丛式井防碰控制技术的研究还比较薄弱,存在着许多问题亟待解决。
开展对渤南油田老区丛式井防碰控制技术的研究,具有重要的现实意义和深远的战略意义。
深入研究丛式井防碰控制技术,不仅可以提高油田的安全生产水平,保障油井设备和人员的安全,还可以有效提高油井的开采效率和经济效益。
对渤南油田老区丛式井防碰控制技术的研究具有重要的实践意义和推广应用前景。
1.2 目的和意义渤南油田老区加密丛式井防碰控制技术的研究旨在解决现有油田老区开采过程中碰井现象频发、存在安全隐患等问题,提高油田生产效率和安全性。
具体目的包括以下几点:1. 提高油田生产效率:通过加密丛式井防碰控制技术,可有效避免碰井问题,提高油田井产能,提升整体生产效率。
2. 保障工人安全:减少碰井事故的发生,降低作业人员伤害风险,提升工作场所安全性,保障工人身体健康和生命安全。
3. 实现油田可持续发展:加密丛式井防碰控制技术的应用,可以延长油井使用寿命,提高油田资源利用率,促进油田产业的可持续发展。
4. 推动油田技术创新:该技术的引入和应用将促进我国油田行业技术水平的提升,推动油田技术创新和转型升级。
渤南油田老区加密丛式井防碰控制技术的研究具有重要的实践意义和社会意义,对于提升油田生产效率、保障工人安全、实现油田可持续发展以及推动我国油田技术创新都具有重要作用。
2. 正文2.1 渤南油田老区情况介绍渤南油田位于中国东部山东省渤海湾海域,是中国重要的海上油气田之一。
该油田始建于上世纪70年代,至今已有数十年的历史。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
随钻陀螺仪在丛式井网防碰中的应用
摘要:丛式井开发效率受到当前技术和材料特性的限制已经进入了某种发展瓶颈,材料和加工工艺的限制导致了目前这种开发方式的生产效率和生产范围都得到了极大的限制。
采用人工干预的方式对其进行控制操作一方面在精度和准确性另一方面整个过程即使符合相应标准但也缺乏标准化的数据流程,这对于视后的案例分析和数据整理缺乏意义。
数字化,自动化智能化是未来我国海上油田钻井工程的转变方向。
只有通过积极引入先进技术,将管理逻辑由人工操作干预,转而变成更加规范科学的数字化管理才能够实现数据的准确捕捉和高精度分析管理。
另一方面我们也要积极引入先进的生产工艺,来解决传统施工工艺所无法解决的难题。
以光纤陀螺仪和加速度计为核心的随钻陀螺测斜系统就是对过去此类开发工程中面临的重点难点进行认真思考,并针对性解决相关问题后,所得出的综合解决方案,该系统设备具有抗辐射性强,操作精度高,耐冲击震动能力优的显著特点。
关键词:光纤陀螺仪;随钻测量;井网防碰;轨迹控制
引言:随着陆地石油资源开采已过峰值以及海上石油开采技术的不断发展完善,当前各个主要国家都在大力发展海上油田丛式井开发。
但各国开发团队持有的机械设备秉承的管理理念和具体的工艺流程具有很大的区别,反映到实际开采效果上就出现了极不平均的效率值分布。
随着浅层石油开发总量的攀升,较容易开采的浅层石油总量不断减少,想要保证石油开采的产量就必须对更加复杂的开采区进行专项研究。
而想要对这些区域的石油资源进行开采,就需要更高精度的丛式井钻井中井眼的轨迹测量。
1.丛式井网面临的技术困扰
高密度丛式井、丛式加密井等钻井过程中开采人员面临的一个主要矛盾就在设置的转眼与相邻转眼之间,间距可能会小于两米,而相邻套管之间又会互相产生磁性干扰,对于远程数据传输控制造成波动,传统的基于磁性测量的状态系统,
在这种复杂环境内很容易受到干扰,造成数据获取不准确,操作延迟加大,甚至某些功能失灵的情况。
目前为了解决这一问题,行业内广泛认可的方式是应用轨迹防碰控制,具体的工作是基于陀螺测斜仪完成,但配合此套设备进行钻井时,必须制定合理的钻近距离美钻近,一定距离后必须停止通过下放陀螺斜仪,完成轨迹测量。
这样一来会打乱原有的布置方案,并且整个掘进过程由于需要频繁的开启和停止,对于施工工艺的连续性会造成很大的影响,整个施工过程受到频繁的开启停止影响施工效率较低,施工成本难以控制。
工作人员所面临的劳动强度增加,且容易出现失误。
想要解决这一问题,单纯的通过改善工艺自身特点,只能够是将决定的距离或间隔的时间缩短,但无法彻底改变这种工作模式,只有通过基于光纤陀螺仪的随钻陀螺测斜系统才能够彻底改变这种复杂易出错低效率的工作模式。
2.光纤陀螺仪的随钻陀螺测斜系统介绍
光纤陀螺仪的随钻陀螺测斜系统的运转机理是通过对地球自转角方位和速度进行收集和判断来实现对测量轨迹进行记录控制的方式,由于这类测量方式不需要对原有的施工工艺产生影响,因此不需要在掘进过程中频繁的停止和开启。
同时他还可以去除由于绝境套筒之间距离较近而产生的磁性干扰问题,因为测量设备仪器根本不会至于这种环境中,而是通过一种更加宏观的方式来把握整个行动的轨迹,可以尽可能提升测量的精度和准确性。
当前我国是移动数据传输应用开发的大果,各类移动互联网传输终端和远程控制终端的生产采购成本远低于其他国家,基于我国完善的信息网络系统和熟悉应用逻辑的人数。
在短时间内将过去的测量分析工作流程转变为数字化,自动化系统自动进行数据捕捉,数据整理,数据分析和远程操控是具有技术基础的。
通过远程数据采集终端对当前数据信息进行采集,对数据库完成相应的更新任务,让控制系统能够直接从数据库中获取当前整体数据,状态在进计算机自动分析处理匹配编制好的程序任务下达,远程操控指令调整全局范围的终端设备,并完成最终的数据分析。
已分析大量数据源后的结果来指导实际操作,有两个好处,一方面是基于计算机系统处理,由于计算机天然的计算能力要优于人工,所以能够减少计算分析过程的等待时间,另一方面是计算机可以长时间不间断的完成复杂的计算工作,不需考虑计算系统的劳动强度和精力分配,因此从长期的数据准确性来看也优于传统的人工计算分析模
式。
除此之外,计算机系统自身具有较强的兼容性和拓展性,由计算机系统自动与已有的系统终端和节点进行数据连通,两者之间能够以更高效的数据传输形式来完成信息的采集和整理分析。
系统数字化,自动化智能化的集成度也会进一步提升。
3.系统组成
随钻陀螺测斜系统在工作过程中能够通过数据采集对当前转头的姿态角度进行确认,为思传提供正确的方向指引,有地下系统和井下系统共同组成井下系统主要是为系统运作提供姿态测量和计算,结果通过液压力脉形式将信号传递到地面,地面系统主要是由处理主机指示器,数据处理计算机和压力传感器几部分组成,其主要的工作任务是及时有效的收集,从地下传输的数据信号,并对数据信号进行整理解码分析处理,在已编程好的程序中,根据数据更新情况,对当前系统设备的运行工作状态进行确认,并根据工作任务和其他辅助数据的更新结果,进行及时科学的姿态调整和方向判断。
光纤随钻陀螺仪及其组成的井下探管是整个系统的核心,其区别于传统的MWD磁性随钻测斜仪,主要采用光纤陀螺仪和石英挠性加速度计作为惯性传感器,敏感地球自转角速率和重力加速度,通过姿态求解算法,获得探管的井斜、方位和工具面等姿态信息,作为井下钻具所钻井眼的轨迹参数。
由于光纤随钻陀螺仪不受磁场环境影响,且能适应钻井环境作业,故该系统的显著优点为不受磁干扰且能随钻测量。
结束语:
基于光纤陀螺仪的随钻陀螺测斜系统的研发成功,整个系统对于数据采集更新处理分析的效率得到了大幅度提升,并且有效克服了由于磁性干扰而造成的数据偏差。
参考文献:
[1]吕伟,孙成志,刘宝生,等.光纤随钻陀螺仪在丛式井网防碰中的应用[J].钻采工艺,2014,37(4):23-25.DOI:10.3969/J.ISSN.1006-768X.2014.04.07.。