开关磁阻电机驱动系统的运行原理及应用
开关磁阻电机的工作原理
开关磁阻电机的工作原理
开关磁阻电机是一种能够快速启停和反转的电动机,它的工作原理基于磁阻的变化。
下面是开关磁阻电机的工作原理的详细解释:
1. 结构:开关磁阻电机由定子和转子组成。
定子上有多个绕组,每个绕组之间通过磁阻作为连接。
转子上也有绕组,与定子的绕组相连。
2. 动作原理:当电流通过定子的绕组时,会在绕组中产生一个磁场。
当转子中的绕组与定子绕组的磁场相互作用时,转子会受到一个力矩的作用,使其转动。
3. 磁场调节:开关磁阻电机通过改变传感器绕组中的电流方向来改变磁场的方向。
改变磁场的方向可以改变转子所受到的力矩的方向,从而实现电机的启动、停止和反转。
4. 工作过程:当需要启动电机时,通过改变传感器绕组中的电流方向,改变磁场的方向,使转子受到力矩的作用开始转动。
当需要停止电机时,改变电流方向,使磁场的方向与转动方向相反,转子受到的力矩变为阻碍转动的力矩,从而停止电机的转动。
当需要反转电机时,改变电流方向,使磁场的方向与原来相反,从而改变转子受到的力矩方向,使电机反向转动。
总之,开关磁阻电机的工作原理是通过改变磁场的方向来实现电机的启动、停止和反转,从而能够快速调节和控制电机的运转状态。
控制电机:开关磁阻电机
题目:开关磁阻电机开关磁阻电机学习《特种电机及其控制》这门课程,这要介绍了无刷直流电机及其控制、开关磁阻电机及其控制系统、步进电机及其控制,其中我最感兴趣的开关磁阻电机。
下面我将对我所了解的开关磁阻电机做一总结。
一、发展背景开关磁阻电机是80年代初随着电力电子、微电脑和控制技术的猛烈发展而发展起来的一种新型调速驱动系统,具有结构简单、运行可靠及效率高等突出优点,成为直流电机调速系统、交流电机调速系统和无刷直流电机调速系统强有力的竞争者,引起各国学者和企业界的广泛关注,目前开关磁阻电机已开始应用于工业、航空业和家用电器等各个领域。
开关磁阻电机的基本概念可追溯到19世纪40年代,1842年,英国的Aberdeen和Dafidson用两个U型电磁铁制造了由蓄电池供电的机车电动机。
20世纪60年代,大功率晶闸管的出现为SR电机的研究发展提供了重要的物质条件。
1967年,英国的Leeds大学开始对SR电机进行深入研究;直到1970年左右,研究结果表明:SR电机可以在单相电流下四象限运行,功率变换器无论是用晶体管还是用普通晶闸管,所需开关数都是最少的;电动机成本也明显低于同容量的感应电动机。
20年代70年代初,美国福特公司研制出最早开关磁阻电机的调速系统,其结构为轴向气隙电动机,具有电动机和发电机运行状态和较宽范围调速的能力,适合于蓄电池供电的电动车辆的转动。
1980年Leeds大学的Lawrenson教授及其同事总结出了自己的研究成果,发表了题为“Variable--Speed Switched Reluctance Motors”的论文,系统阐述了开关磁阻电机的基本原理与设计特点,并得出了新型磁阻电机的单位出力可以与交流感应电机相媲美甚至还略占优势的结论。
1983年英国TASC公司推出了Oulton系列通用SRD调速产品,问世不久便受到了各国电气传动界的广泛重视。
从1984年开始,我国许多单位先后开展了SRD研究,在借鉴国外经验的基础上,我国SR电机的研究发展很快。
开关磁阻电机原理
开关磁阻电机原理
开关磁阻电机是一种具有简单结构和高转矩密度的电动机。
它使用了磁阻转矩产生装置,其中磁阻转矩由电动机的定子和转子之间的磁阻产生。
开关磁阻电机的工作原理如下:
1. 组成:开关磁阻电机由定子、转子、定子绕组和悬挂片组成。
定子和转子之间通过永久磁铁产生磁阻转矩。
2. 工作原理:当定子线圈通电时,会在定子产生磁场。
定子的磁场会将转子吸引到某个位置,使两者之间形成磁阻。
同时,钢片的切割磁感线也会产生涡流,涡流通过电磁耦合作用与磁场相互作用,从而形成磁阻转矩。
3. 磁阻转矩控制:通过控制定子绕组的电流和相位,可以调节磁阻转矩的大小和方向。
通过改变电流的极性和大小,可以调节转子的位置和速度。
4. 高转矩密度:开关磁阻电机具有高转矩密度,是因为其转矩与控制电流的平方成正比。
即使在较低电流下,也能产生较大的转矩输出。
总而言之,开关磁阻电机利用磁阻转矩来实现机械输出。
它具有结构简单、转矩密度高的特点,并且可以通过调节电流控制转矩的大小和方向。
开关磁阻电机原理和应用
开关践俎电机开关磁阻电机是一种新型调速电机,调速系统兼具直流、交流两类调速系统的优点,是继、调速系统的最新一代无极调速系统。
它的结构简单坚固,调速范围宽,调速性能优异,且在整个调速范围内都具有较高效率,高。
主要由开关磁阻电机、功率变换器、控制器与位置检测器四部分组成。
控制器内包含控制电路与功率变换器,而转子位置检测器则安装在电机的一端。
其电机部分由于是运用了磁阻最小原理,故称为磁阻电动机,又由于线圈电流通断、磁通状态直接受开关控制,故称为开关磁阻电动机。
特征开关磁阻电机结构简单,性能优越,可靠性高,覆盖功率范围10VC5MW的各种高低速驱动调速系统。
使的开关磁阻电机存在许多潜在的领域,在各种需要调速和高效率的场合均能得到广泛使用(电动车驱动、通用工业、家用电器、纺织机械、电力传动系统等各个领域)。
优点♦其结构简单.价格便宜・电机的转子没有绕组和战铁。
♦电机转子无永磁体.允许较高的.由干绕组均在定子上.电机容易冷却。
效率奇・损耗小。
♦转矩方向与电流方向无关.只需单方相绕组电流•毎相一个功率开关•功率电路简单町扱♦转子上没有电刷结沟坚固.适用干高速驰动。
♦转子的转动惯扯小.有牧高转矩惯煲比.♦调速范m.控制灵活・易于实现备种再生制动能力。
♦并具频繁启动(1000 ;v小时)•正向反向运转的特殊场合使用・♦且启动电流小•启动转矩人•低逮时更为突出。
♦电机的绕组电流方向为单方向.电力控制电路简单・具有较烏的经济性和吋維性。
♦对通过机和电的统一协调设汁满足备种特殊使用要求。
缺点其工作原理决定了.如果需要开关磁阻电机运行程定对維.必须使电机与控制配合的很好。
因其要使用位HL传感器・增加了结沟災杂性,降低了可靠性。
对干电机本身而肓.转矩馱动大是其固有的缺点:在电机远离设计点的时候.转矩脉动人仝体现的更加明協。
如果单纯使用电流斩波或最优导通角控制方法.对其转矩脉动的改售不是很人.需耍加入更加如朵的貳法。
另外.运行时噪音和撮动较人.非线形性强也足开关險阻电机需耍解决的何題。
开关磁阻电机控制原理
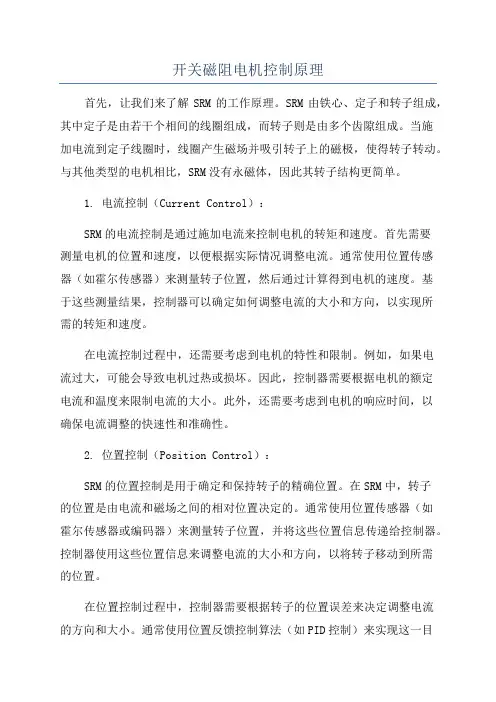
开关磁阻电机控制原理首先,让我们来了解SRM的工作原理。
SRM由铁心、定子和转子组成,其中定子是由若干个相间的线圈组成,而转子则是由多个齿隙组成。
当施加电流到定子线圈时,线圈产生磁场并吸引转子上的磁极,使得转子转动。
与其他类型的电机相比,SRM没有永磁体,因此其转子结构更简单。
1. 电流控制(Current Control):SRM的电流控制是通过施加电流来控制电机的转矩和速度。
首先需要测量电机的位置和速度,以便根据实际情况调整电流。
通常使用位置传感器(如霍尔传感器)来测量转子位置,然后通过计算得到电机的速度。
基于这些测量结果,控制器可以确定如何调整电流的大小和方向,以实现所需的转矩和速度。
在电流控制过程中,还需要考虑到电机的特性和限制。
例如,如果电流过大,可能会导致电机过热或损坏。
因此,控制器需要根据电机的额定电流和温度来限制电流的大小。
此外,还需要考虑到电机的响应时间,以确保电流调整的快速性和准确性。
2. 位置控制(Position Control):SRM的位置控制是用于确定和保持转子的精确位置。
在SRM中,转子的位置是由电流和磁场之间的相对位置决定的。
通常使用位置传感器(如霍尔传感器或编码器)来测量转子位置,并将这些位置信息传递给控制器。
控制器使用这些位置信息来调整电流的大小和方向,以将转子移动到所需的位置。
在位置控制过程中,控制器需要根据转子的位置误差来决定调整电流的方向和大小。
通常使用位置反馈控制算法(如PID控制)来实现这一目标。
控制器将位置误差和其他参数(如转子惯性、负载和电机特性)纳入考虑,并根据算法的要求来调整电流。
在实际应用中,位置控制通常需要考虑到转子位置的精确性以及抗干扰和鲁棒性等问题。
总结起来,开关磁阻电机的控制原理主要包括电流控制和位置控制两个方面。
电流控制用于调整电机的转矩和速度,而位置控制用于确定和保持转子的精确位置。
控制器根据电机的特性和限制,使用合适的控制算法来实现所需的控制效果。
电动车开关磁阻电机的结构和原理总结
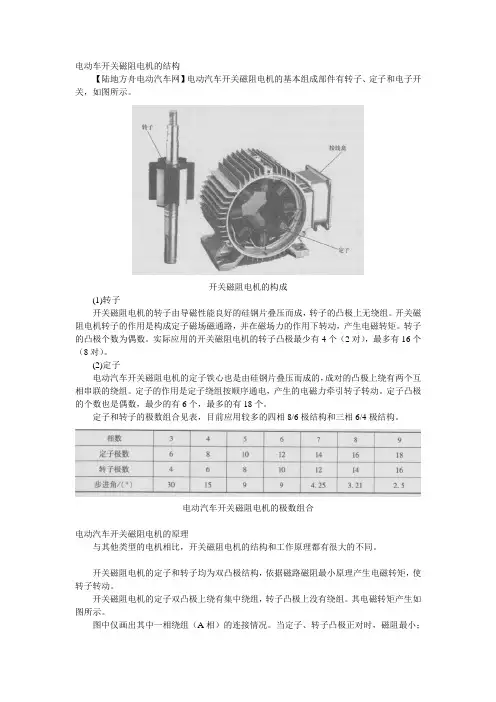
电动车开关磁阻电机的结构【陆地方舟电动汽车网】电动汽车开关磁阻电机的基本组成部件有转子、定子和电子开关,如图所示。
开关磁阻电机的构成(1)转子开关磁阻电机的转子由导磁性能良好的硅钢片叠压而成,转子的凸极上无绕组。
开关磁阻电机转子的作用是构成定子磁场磁通路,并在磁场力的作用下转动,产生电磁转矩。
转子的凸极个数为偶数。
实际应用的开关磁阻电机的转子凸极最少有4个(2对),最多有16个(8对)。
(2)定子电动汽车开关磁阻电机的定子铁心也是由硅钢片叠压而成的,成对的凸极上绕有两个互相串联的绕组。
定子的作用是定子绕组按顺序通电,产生的电磁力牵引转子转动。
定子凸极的个数也是偶数,最少的有6个,最多的有18个。
定子和转子的极数组合见表,目前应用较多的四相8/6极结构和三相6/4极结构。
电动汽车开关磁阻电机的极数组合电动汽车开关磁阻电机的原理与其他类型的电机相比,开关磁阻电机的结构和工作原理都有很大的不同。
开关磁阻电机的定子和转子均为双凸极结构,依据磁路磁阻最小原理产生电磁转矩,使转子转动。
开关磁阻电机的定子双凸极上绕有集中绕组,转子凸极上没有绕组。
其电磁转矩产生如图所示。
图中仅画出其中一相绕组(A相)的连接情况。
当定子、转子凸极正对时,磁阻最小;当定子、转子凸极完全错开时,磁阻最大。
当B相绕组施加电流时,由于磁通总是选择磁阻最小的路径闭合,为减少磁路的磁阻,转子将顺时针旋转,直到转子凸极2与定子凸极B 的轴线重合。
四相8/6极开关磁阻电机当各电子开关依次控制A、B、C、D四个定子绕组通电时,转子就会不断受电磁力的作用而持续转动。
如果定子绕组按D-A-B-C的顺序通电,则转子就会逆着励磁顺序以逆时针方向连续旋转。
反之,若按B-A-D-C的顺序通电,则电机转子就会沿顺时针方向转动。
根据定子、转子凸极对数的配比,开关磁阻电机可以设计成不同的结构,如图所示。
开关磁阻电机的不同凸极配比。
开关磁阻电机工作原理及其驱动系统
开关磁阻电机工作原理及其驱动系统开关磁阻电机Switched Reluctance Drivesystem, SRD开关磁阻电机驱动系统(Switched Reluctance Drive system, SRD)具有一些很有特色的优点:电机结构简单、坚固、维护方便甚至免维护,起动及低速时转矩大、电流小;高速恒功率区范围宽、性能好,在宽广转速和功率范围内都具有高输出和高效率而且有很好的容错能力。
这使得SR电机驱动系统在家用电器、通用工业、伺服与调速系统、牵引电机、高转速电机、航空航天等领域得到广泛应用。
SR电机是一种机电能量转换装置。
根据可逆原理,SR电机和传统电机一样,它既可将电能转换为机械能——电动运行,在这方面的理论趋于成熟;也可将机械能转换为电能——发电运行,其内部的能量转换关系不能简单看成是SR电动机的逆过程。
开关磁阻电机的发展概况和发展趋势“开关磁阻电机(Switched reluctance motor)”一词源见于美国学者S.A.Nasarl969年所撰论文,它描述了这种电机的两个基本特征:①开关性——电机必须工作在一种连续的开关模式,这是为什么在各种新型功率半导体器件可以获得后这种电机才得以发展的主要原因;②磁阻性——它是真正的磁阻电机,定、转子具有可变磁阻磁路,更确切地说,是一种双凸极电机。
开关磁阻电机的概念实际非常久远,可以追溯到19世纪称为“电磁发动机”的发明,这也是现代步进电机的先驱。
在美国,这种电机常常被称为“可变磁阻电机(variable reluctance motor, VR电机)”一词, 但是VR电机也是步进电机的一种形式,容易引起混淆。
有时人们也用“无刷磁阻电机(Brushless reluctance motor)”一词,以强调这种电机的无刷性。
“电子换向磁阻电机(Electronically commutated reluctance motor)”一词也曾采用,从工作原理来看,甚至比“开关磁阻”的说法更准确—些,但也容易与电子换向的水磁直流电机相混淆。
开关磁阻调速电机工作原理
开关磁阻调速电机工作原理
下载温馨提示:该文档是我店铺精心编制而成,希望大家下载以后,能够帮助大家解决实际的问题。
文档下载后可定制随意修改,请根据实际需要进行相应的调整和使用,谢谢!
Download tips: This document is carefully compiled by theeditor. l hope that after you downloadthem,they can help yousolve practical problems. The document can be customized andmodified afterdownloading,please adjust and use it according toactual needs, thank you!
开关磁阻调速电机工作原理简述:
①结构特点:开关磁阻电机(SRM)由定子和转子组成,定子有多相绕组,转子为凸极铁心,无绕组或永磁体。
②磁阻转矩:电流通过定子绕组时产生磁场,转子凸极在磁场作用下移动至磁阻最小位置,即磁场最强点,形成磁阻转矩。
③定子电流控制:控制器按预定序列和时序开关定子绕组的电流,使定子磁场动态变化,促使转子连续转动。
④转速调节:通过改变电流导通的相位和电流幅值,精细调控转子位置和转速,实现宽范围调速。
⑤四象限运行:配备适当控制策略和制动单元,SRM可实现正反转及制动,适用于频繁起停场合。
⑥效率与成本:因结构简单、调速性能好、效率高且成本相对低,开关磁阻电机在特定领域应用广泛。
综上,开关磁阻电机通过电磁相互作用和适时切换定子绕组电流,以磁阻最小原理驱动转子运转,达成高效调速。
(完整版)开关磁阻电机驱动系统的运行原理及应用
开关磁阻电机驱动系统的运行原理及应用(二)(低轴阻发电机参考资料)1 引言开关磁阻电机驱动系统(SDR)具有一些很有特色的优点:电机结构简单、坚固、维护方便甚至免维护,启动及低速时转矩大、电流小;高速恒功率区范围宽、性能好,在宽广转速和功率访问内都具有高输出和高效率而且有很好的容错能力。
这使得SR电机系统在家用电器、通用工业、伺服与调速系统、牵引电机、高转速电机、航空航天等领域得到广泛应用。
SR电机是一种机电能量转换装置。
根据可逆原理,SR电机和传统电机一样,它既可将电能转换为机械能—电动运行,在这方面的理论趋于成熟;也可将机械能转换为电能—发电运行,其内部的能量转换关系不能简单看成是SR电动机的逆过程。
本文将从SR 电机电动和发电运行这两个角度阐述SR电机的运行原理。
2 电动运行原理2.1 转矩产生原理控制器根据位置检测器检测到的定转子间相对位置信息,结合给定的运行命令(正转或反转),导通相应的定子相绕组的主开关元件。
对应相绕组中有电流流过,产生磁场;磁场总是趋于“磁阻最小”而产生的磁阻性电磁转矩使转子转向“极对极”位置。
当转子转到被吸引的转子磁极与定子激磁相相重合(平衡位置)时,电磁转矩消失。
此时控制器根据新的位置信息,在定转子即将达到平衡位置时,向功率变换器发出命令,关断当前相的主开关元件,而导通下一相,则转子又会向下一个平衡位置转动;这样,控制器根据相应的位置信息按一定的控制逻辑连续地导通和关断相应的相绕组的主开关,就可产生连续的同转向的电磁转矩,使转子在一定的转速下连续运行;再根据一定的控制策略控制各相绕组的通、断时刻以及绕组电流的大小,就可使系统在最隹状态下运行。
图1 三相sr电动机剖面图从上面的分析可见,电流的方向对转矩没有任何影响,电动机的转向与电流方向无关,而仅取决于相绕组的通电顺序。
若通电顺序改变,则电机的转向也发生改变。
为保证电机能连续地旋转,位置检测器要能及时给出定转子极间相对位置,使控制器能及时和准确地控制定子各相绕组的通断,使srm能产生所要求的转矩和转速,达到预计的性能要求。
开关磁阻电机的原理及其控制系统
开关磁阻电机的原理及其控制系统开关磁阻电机80年代初随着电力电子、微电脑和控制理论的迅速发展而发展起来的一种新型调速驱动系统。
具有结构简单、运行可靠、成本低、效率高等突出优点,目前已成为交流电机调速系统、直流电机调速系统、无刷直流电机调速系统的强有力的竞争者。
一、开关磁阻电机的工作原理开关磁阻电机的工作原理遵循磁磁阻最小原理,即磁通总是要沿着磁阻最小路径闭合。
因此,它的结构原则是转子旋转时磁路的磁阻要有尽可能大的变化。
所以开关磁阻电动机采用凸极定子和凸极转子的双凸极结构,并且定转子极数不同。
开关磁阻电机的定子和转子都是凸极式齿槽结构。
定、转子铁芯均由硅钢片冲成一定形状的齿槽,然后叠压而成,其定、转子冲片的结构如图1所示。
图1:开关磁阻电机定、转子结构图图1所示为12/8极三相开关磁阻电动机,S1. S2是电子开关,VD1, VD2是二极管,是直流电源。
电机定子和转子呈凸极形状,极数互不相等,转子由叠片构成,定子绕组可根据需要采用串联、并联或串并联结合的形式在相应的极上得到径向磁场,转子带有位置检测器以提供转子位置信号,使定子绕组按一定的顺序通断,保持电机的连续运行。
电机磁阻随着转子磁极与定子磁极的中心线对准或错开而变化,因为电感与磁阻成反比,当转子磁极在定子磁极中心线位置时,相绕组电感最大,当转子极间中心线对准定子磁极中心线时,相绕组电感最小。
当定子A相磁极轴线OA与转子磁极轴线O1不重合时,开关S1, S2合上,A相绕组通电,电动机内建立起以OA为轴线的径向磁场,磁通通过定子扼、定子极、气隙、转子极、转子扼等处闭合。
通过气隙的磁力线是弯曲的,此时磁路的磁导小于定、转子磁极轴线重合时的磁导,因此,转子将受到气隙中弯曲磁力线的切向磁拉力产生的转矩的作用,使转子逆时针方向转动,转子磁极的轴线O1向定子A相磁极轴线OA趋近。
当OA和O1轴线重合时,转子己达到平衡位置,即当A相定、转子极对极时,切向磁拉力消失。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
开关磁阻电机驱动系统的运行原理及应用(二)
(低轴阻发电机参考资料)
1 引言
开关磁阻电机驱动系统(SDR)具有一些很有特色的优点:电机结构简单、坚固、维护方便甚至免维护,启动及低速时转矩大、电流小;高速恒功率区范围宽、性能好,在宽广转速和功率访问内都具有高输出和高效率而且有很好的容错能力。
这使得SR电机系统在家用电器、通用工业、伺服与调速系统、牵引电机、高转速电机、航空航天等领域得到广泛应用。
SR电机是一种机电能量转换装置。
根据可逆原理,SR电机和传统电机一样,它既可将电能转换为机械能—电动运行,在这方面的理论趋于成熟;也可将机械能转换为电能—发电运行,其内部的能量转换关系不能简单看成是SR电动机的逆过程。
本文将从SR电机电动和发电运行这两个角度阐述SR电机的运行原理。
2 电动运行原理
2.1 转矩产生原理
控制器根据位置检测器检测到的定转子间相对位置信息,结合给定的运行命令(正转或反转),导通相应的定子相绕组的主开关元件。
对应相绕组中有电流流过,产生磁场;磁场总是趋于“磁阻最小”而产生的磁阻性电磁转矩使转子转向“极对极”位置。
当转子转到被吸引的转子磁极与定子激磁相相重合(平衡位置)时,电磁转矩消失。
此时控制器根据新的位置信息,在定转子即将达到平衡位置时,向功率变换器发出命令,关断当
前相的主开关元件,而导通下一相,则转子又会向下一个平衡位置转动;这样,控制器根据相应的位置信息按一定的控制逻辑连续地导通和关断相应的相绕组的主开关,就可产生连续的同转向的电磁转矩,使转子在一定的转速下连续运行;再根据一定的控制策略控制各相绕组的通、断时刻以及绕组电流的大小,就可使系统在最隹状态下运行。
图1 三相sr电动机剖面图
从上面的分析可见,电流的方向对转矩没有任何影响,电动机的转向与电流方向无关,而仅取决于相绕组的通电顺序。
若通电顺序改变,则电机的转向也发生改变。
为保证电机能连续地旋转,位置检测器要能及时给出定转子极间相对位置,使控制器能及时和准确地控制定子各相绕组的通断,使srm能产生所要求的转矩和转速,达到预计的性能要求。
2.2 电路分析
图2中电源vcc是一直流电源,3个电感分别表示srm的三相绕组,igbt1~igbt6为与绕组相连的可控开关元件,6个二极管为对应相的续流二极管。
当第一相绕组的开关管导通时,电源给第一相励磁,电流的回路(即励磁阶段)是由电源正极→上开关管→绕组→下开关管→电源负极,如图2(a)所示。
开关管关断时,由于绕组是一个电感,根据电工理论,电感的电流不允许突变,此时电流的续流回路(即去磁阶段)是绕组→上续流二极管→电源→下续流二极管→绕组,如图2(b)所示。
图2 srm电路工作示意图
2.3 能量转换关系
当忽略铁耗和各种附加损耗时,srm工作时的能量转换过程为:通电相绕组的电感处在电感上升区域内(转子转向“极对极”位置),当开关管导通时,输入的净电能一部分转化为磁场储能,一部分转化为机械能输出;当开关管关断时,绕组电流通过二极管和电源续流,存储的磁场储能一部分转化为电能回馈电源,另一部分则转化为机械能输出。
2.4 sr电动机的运行特性[1][2]
sr电动机运行速度低于ωfc(第一临界速度)的范围内,为了保证ψmax和i不超过允许值,采用改变电压、导通角和触发角三者中任一个或任两个,或三者同时配合控制。
当sr电动机在高于ωfc范围运行时,在外加电压、导通角和触发角都一定的条件下,随着转速的增加,磁链和电流将下降,转矩则随着转速的平方下降(如图3中细实线)。
为了得到恒功率特性,必须采用可控条件。
但是外施电压最大值是由电源功率变换器决定的,而导通角又不能无限增加(一般不能超过半个转子极距)。
因此,在电压和导通角都达最大时,能得到的最大功率的最高转速ωsc被称之为“第二临界转速”。
当转速再增加时,由于可控条件都已经达到极限,转矩将随转速的二次方下降,如图3所示。
图3 sr电动机的运行特性
开关磁阻电机一般运行在恒转矩区和恒功率区。
在这两个区域中,电机的实际运行特性可控。
通过控制条件,可以实现在粗实线以下的任意实际运行特性。
而在串励特性区,电机的可控条件都已达极限,电机的运行特性不再可控,电机呈现自然串励运行特性,故电机一般不会运行在此区域。
运行时存在着第一、第二两个临界运行点是开关磁阻电机的一个重要特点。
采用不同的可控条件匹配可以得到两个临界点的不同配置,从而得到各种各样所需的机械特性,这就是开关磁阻电动机具有优良调速性能的原因之一。
从设计的观点看,两个临界点的合理配置是保证sr电动机设计合理,满足给定技术指标要求的关键。
从控制角度看,在上述两个区域采用不同的控制方法,在第一临界转速以下一般采用电流斩波控制方式(ccc方式),在第一、第二临界转速之间采用角度位置控制方式(apc 方式)。
3 发电运行原理
3.1 开关磁阻发电机(switched reluctance generator)简介
开关磁阻发电机(srg)的研究始于20世纪80年代末。
初期它是被用作飞机上的起动/发电机的,所以,又称为sr起动/发电机[4][5][6]。
由于开关磁阻电机在航天飞机中的广阔应用前景,引起了一些国家政府部门和航天企业的高度重视。
1990年美国空军(usaf)、wright实验室、wpafb联合与通用电气飞机发动机公司(general electric aircraft engine)签约,共同资助ge公司开展开关磁阻组合起动/发电机的研究。
lucas航空公司(lucas aerospace)也开展了sr起动/发电机的研究,认为sr起动/发电机可以在飞机发动机熄火的紧急情况下,由风力发动机(windmilling engine)驱动为众多的机载设备提供更加可靠的应急电源。
我国在sr发电机的领域也开展了相关的研究活动。
其中西北工业大学、西安交通大学在国家“九五”预研基金和国家教委博士点基金的资助下进行sr起动/发电机的相关研究,研制了4kw的sr起动/发电机[3]。
南京航天航空大学也开展了sr发电机的研
究工作。
与其它发电机相比,开关磁阻发电机具有独特的结构特点:
(1) 结构简单其定、转子均为简单的叠片式双凸极结构,定子上绕有集中绕组,转子上无绕组及永磁体;
(2) 容错能力强,无论从物理方面还是从电磁方面来讲,电机定子各相绕组间都是相互独立的,因而在一相甚至两相故障的情况下,仍然能有一定功率的电能输出;
(3) 可以作成很高转速的发电装置,从而达到很高的能流密度。
3.2 转矩产生原理
如图4所示,与电动运行时不同,绕组在转子转离“极对极”位置(即电感下降区)时通电,产生的磁阻性电磁转矩趋使电机回到“极对极”位置,但原动机驱动转子克服电磁转矩继续逆时针旋转。
此时电磁转矩与转子运动方向相反,阻碍转子运动,是阻转转矩性质。
图4 三相sr发电机剖面图
当转子转到下一相的“极对极”位置时,控制器根据新的位置信息向功率变换器
发出命令,关断当前相的主开关元件,而导通下一相,则下一相绕组会在转子转离“极对极”位置通电。
这样,控制器根据相应的位置信息按一定的控制逻辑连续地导通和关断相应的相绕组的主开关,就可产生连续的阻转转矩,在原动机的拖动下发电。
3.3 电路分析
根据法拉第电磁感应定律“运动导体在磁场中会产生电势”,而srg转子仅由叠片构成,没有任何带磁性的磁体。
这就需要在srg发电前有电源提供给srg励磁,使其内部产生磁场。
所以,srg的特点是首先要通过定子绕组对电机励磁。
这一点和其它发电机有着很明显的区别。
srg的工作原理如下:
图5中电源vcc是一直流电源,既可以是电池,也可以是直流电机。
三个电感分别表示srg的三相绕组,igbt1~igbt6为与绕组相连的可控开关元件,6个二极管为对应相的续流二极管。
当第一相绕组的开关管导通时(即励磁阶段),电源给第一相励磁,电流的回路是由电源正极→上开关管→绕组→下开关管→电源负极,如图5(a)所示。
开关管关断时,由于绕组是一个电感,根据电工理论,电感的电流不允许突变,电流的续流回路(即发电阶段)是绕组→上续流二极管→电源→下续流二极管→绕组,如图5(b)所示。
3.4 能量转换关系
当忽略铁耗和各种附加损耗时,srg工作时的能量转换过程为:通电相绕组的电感处在电感下降区域内(转子转离“极对极”位置),当开关管导通时,输入的净电能转化为磁场储能,同时原动机拖动转子克服srg产生的与旋转方向相反的转矩对srg做功使机械能也转化为磁场储能;当开关管关断时,srg绕组电流续流,磁场储能转化为电能回馈电源,并且机械能也转化为电能给电源充电。
图5 srg电路工作示意图
3.5 sr发电机的运行特性
sr发电机的运行特性与sr电动机的运行特性类似,只不过将曲线沿速度轴翻转到转矩为负的第四象限,在此不再赘述。
4 结束语
虽然srd系统的发展历程仅仅二十余年,但它取得了令人瞩目的成绩。
其产品已在电动车用驱动系统、家用电器、工业应用、伺服系统、高速驱动、航空航天等众多领域得到成功应用,其功率范围也覆盖了从10w到5mw的宽广范围。
它已成为现代调速系统中一支不可忽视的竞争力量。
作为一种结构简单、鲁棒性能好、价格便宜的新型调速系统,开关磁阻电机及其调速系统引起各国电气传动界的广泛关注和浓厚兴趣,在世界范围内,正在形成理论研究和实际应用齐头并进的发展趋势。