控制系统数字仿真第二章习题答案
控制系统计算机仿真参考答案
控制系统计算机仿真(电子工业出版社蒋珉)参考答案说明:1.对于可以用文字或数字给出的情况,直接给出参考答案。
2.对于难以用文字或数字给出的情况,将提供MATLAB程序或Simulink模型。
目录:第 1 章绪论第 2 章连续系统数字仿真的基本算法第 3 章采样控制系统的数字仿真第 4 章控制系统优化设计与仿真第 5 章控制系统仿真建模第 6 章仿真的工程应用实例第 1 章绪论1.1 系统是被研究的对象,模型是对系统的描述,仿真是通过模型研究系统的一种工具或手段。
1.2 数学仿真的基本工具是数字计算机,因此也称为计算机仿真或数字仿真。
将数学模型通过一定的方式转变成能在计算机上实现和运行的数学模型,称之为仿真模型。
1.3 因为仿真是在模型上做试验,是一种广义的试验。
因此,仿真基本上是一种通过试验来研究系统的综合试验技术,具有一般试验的性质。
而进行试验研究通常是需要进行试验设计。
1.4 解析法又称为分析法,它是应用数学推导、演绎去求解数学模型的方法。
仿真法是通过在模型上进行一系列试验来研究问题的方法。
利用解析法求解模型可以得出对问题的一般性答案,而仿真法的每一次运行则只能给出在特定条件下的数值解。
,解析法常常是围绕着使问题易于求解,而不是使研究方法更适合于问题,常常因为存在诸多困难而不能适用。
从原则上讲,仿真法对系统数学模型的形式及复杂程度没有限制,是广泛适用的,但当模型的复杂程度增大时,试验次数就会迅速增加,从而影响使用效率。
1.5 仿真可以应用于系统分析、系统设计、理论验证和训练仿真器等方面。
1.6[]x xx21 01 000 1720 8=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---= y u注:本题答案是用MA TLAB中tf2ss()函数给出的,是所谓“第二能控标准型”(下同)。
1.7[]xx x 310001010001133=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---=y u 1.8 25433)(232+++++=s s s s s s G 1.9[])(264.0368.00)()(001)(010*******.0368.1)1(k k y k u k k x x x =⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-=+ 1.10 仿真模型见praxis1_10_1.mdl ;MA TLAB 程序见praxis1_10_2.m 。
自动控制原理课后习题答案第二章
第二章2-3试证明图2-5(a)的电网络与(b)的机械系统有相同的数学模型。
分析首先需要对两个不同的系统分别求解各自的微分表达式,然后两者进行对比,找出两者之间系数的对应关系。
对于电网络,在求微分方程时,关键就是将元件利用复阻抗表示,然后利用电压、电阻和电流之间的关系推导系统的传递函数,然后变换成微分方程的形式,对于机械系统,关键就是系统的力学分析,然后利用牛顿定律列出系统的方程,最后联立求微分方程。
证明:(a)根据复阻抗概念可得:即取A、B两点进行受力分析,可得:整理可得:经比较可以看出,电网络(a)和机械系统(b)两者参数的相似关系为2-5 设初始条件均为零,试用拉氏变换法求解下列微分方程式,并概略绘制x(t)曲线,指出各方程式的模态。
(1)(2)2-7 由运算放大器组成的控制系统模拟电路如图2-6所示,试求闭环传递函数Uc(s)/Ur(s)。
图2-6 控制系统模拟电路解:由图可得联立上式消去中间变量U1和U2,可得:2-8 某位置随动系统原理方块图如图2-7所示。
已知电位器最大工作角度,功率放大级放大系数为K3,要求:(1) 分别求出电位器传递系数K0、第一级和第二级放大器的比例系数K1和K2;(2) 画出系统结构图;(3) 简化结构图,求系统传递函数。
图2-7 位置随动系统原理图分析:利用机械原理和放大器原理求解放大系数,然后求解电动机的传递函数,从而画出系统结构图,求出系统的传递函数。
解:(1)(2)假设电动机时间常数为Tm,忽略电枢电感的影响,可得直流电动机的传递函数为式中Km为电动机的传递系数,单位为。
又设测速发电机的斜率为,则其传递函数为由此可画出系统的结构图如下:--(3)简化后可得系统的传递函数为2-9 若某系统在阶跃输入r(t)=1(t)时,零初始条件下的输出响应,试求系统的传递函数和脉冲响应。
分析:利用拉普拉斯变换将输入和输出的时间域表示变成频域表示,进而求解出系统的传递函数,然后对传递函数进行反变换求出系统的脉冲响应函数。
控制系统数字仿真与CAD 第三版 (张晓华 著) 机械工业出版社 课后答案
课后答案网 您最真诚的朋友
网团队竭诚为学生服务,免费提供各门课后答案,不用积分,甚至不用注
册,旨在为广大学生提供自主学习的平台!
课后答案网:
视频教程网:
PPT 课件网:
课后答案网:
若侵犯了您的版权利益,敬请来信告知!
课后答案网 w w w .h a c k s h p .c n
课后答案网
课后答案网
课后答案网
课后答案网
课后答案网
课后答案网
课后答案网
课后答案网
课后答案网
课后答案网
课后答案网
课后答案网
课后答案网
课后答案网
课后答案网
课后答案网
课后答案网
课后答案网
课后答案网
课后答案网
课后答案网
课后答案网
课后答案网
课后答案网
课后答案网
课后答案网
课后答案网
课后答案网
课后答案网
课后答案网
课后答案网
课后答案网
课后答案网
课后答案网
课后答案网
课后答案网
课后答案网
课后答案网
课后答案网
课后答案网
课后答案网
课后答案网
课后答案网
课后答案网
课后答案网
课后答案网
课后答案网
课后答案网
课后答案网 。
控制系统仿真 答案 薛定宇 第二版

第一部分:MATLAB 必备基础知识、控制系统模型与转换、线性控制系统的计算机辅助分析(4学时)1.2.3.答:(a)>> s=tf('s');G=(s^3+4*s+2)/(s^3*(s^2+2)*((s^2+1)^3+2*s+5))Transfer function:s^3 + 4 s + 2------------------------------------------------------s^11 + 5 s^9 + 9 s^7 + 2 s^6 + 12 s^5 + 4 s^4 + 12 s^3(b)>> num=[1 0 0.568];den=[1 -1.2 1.19 -0.99];H=tf(num,den,'Ts',0.1)Transfer function:z^2 + 0.568-----------------------------z^3 - 1.2 z^2 + 1.19 z - 0.99Sampling time: 0.14.设y(t)=x1;A=[0,1,0;0,0,1;-13,-4,-5];B=[0;0;2];C=[1,0,0];D=0;G=SS(A,B,C,D)a =x1 x2 x3x1 0 1 0x2 0 0 1x3 -13 -4 -5b =u1x1 0x2 0x3 2c =x1 x2 x3y1 1 0 0d =u1y1 0Continuous-time model.传递函数模型:对式子两联进行拉氏变换,G(s)=2/(s^3+13*s^2+4*s+5)对分子分母进行分解因式处理5.进行Z变换6.s=tf('s');syms J Kps Ki;G=(s+1)/(J*s^2+2*s+5);Gc=(Kps+Ki)/s;H=1;GG=feedback(G*Gc,H) 7.(a)s=tf('s');G=(211.87*s+317.64)/((s+20)*(s+94.34)*(s+0.1684));Gc=(169.6*s+400)/s/(s+4);H=1/(0. 01*s+1);GG=feedback(G*Gc,H)Transfer function:359.3 s^3 + 3.732e004 s^2 + 1.399e005 s + 127056----------------------------------------------------------------------------------0.01 s^6 + 2.185 s^5 + 142.1 s^4 + 2444 s^3 + 4.389e004 s^2 + 1.399e005 s + 1270568.Ga=feedback(1/s^2,50);G1=feedback((1/(s+1))*(s/(s^2+2)),(4*s+2)/((s+1)^2));G2=feedback(Ga* G1,(s^2+2)/(s^3+14));G=3*G2Transfer function:3 s^6 + 6 s^5 + 3 s^4 + 42 s^3 + 84 s^2 + 42 s-----------------------------------------------------------------------------------------------------s^10 + 3 s^9 + 55 s^8 + 175 s^7 + 300 s^6 + 1323 s^5 + 2656 s^4 + 3715 s^3 + 7732 s^2 + 5602 s + 14009.>> s=tf('s');G=(s+1)^2*(s^2+2*s+400)/(s+5)^2/(s^2+3*s+100)/(s^2+3*s+2500)Transfer function:s^4 + 4 s^3 + 405 s^2 + 802 s + 400-------------------------------------------------------s^6 + 16 s^5 + 2694 s^4 + 34040 s^3 + 393225 s^2+ 2.695e006 s + 6.25e006>> step(G)s=tf('s');G=(s+1)^2*(s^2+2*s+400)/(s+5)^2/(s^2+3*s+100)/(s^2+3*s+2500);G1=c2d(G,0.01)Transfer function:4.716e-005 z^5 - 0.0001396 z^4 + 9.596e-005 z^3 + 8.18e-005 z^2 - 0.0001289 z + 4.355e-005 ------------------------------------------------------------------------------------------z^6 - 5.592 z^5 + 13.26 z^4 - 17.06 z^3 + 12.58 z^2 - 5.032 z + 0.8521>> step(G1)Sampling time: 0.01>> s=tf('s');G=(s+1)^2*(s^2+2*s+400)/(s+5)^2/(s^2+3*s+100)/(s^2+3*s+2500);G1=c2d(G,0.1) Transfer function:0.0003982 z^5 - 0.0003919 z^4 - 0.000336 z^3+ 0.0007842 z^2 - 0.000766 z + 0.0003214-------------------------------------------------------z^6 - 2.644 z^5 + 4.044 z^4 - 3.94 z^3 + 2.549 z^2- 1.056 z + 0.2019Sampling time: 0.1>> step(G1)>> s=tf('s');G=(s+1)^2*(s^2+2*s+400)/(s+5)^2/(s^2+3*s+100)/(s^2+3*s+2500);G1=c2d(G,1) Transfer function:8.625e-005 z^5 - 4.48e-005 z^4 + 6.545e-006 z^3+ 1.211e-005 z^2 - 3.299e-006 z + 1.011e-007-------------------------------------------------------z^6 - 0.0419 z^5 - 0.07092 z^4 - 0.0004549 z^3+ 0.002495 z^2 - 3.347e-005 z + 1.125e-007Sampling time: 1>> step(G1)10.(a)>> s=tf('s');G=1/(s^3+2*s^2+s+2);eig(G)ans =-2.00000.0000 + 1.0000i0.0000 - 1.0000i临界稳定(b)>> s=tf('s');G=1/(6*s^4+3*s^3+2*s^2+s+1);eig(G) ans =-0.4949 + 0.4356i-0.4949 - 0.4356i0.2449 + 0.5688i0.2449 - 0.5688i不稳定(c)>> s=tf('s');G=1/(s^4+s^3-3*s^2-s+2);eig(G)ans =-2.0000-1.00001.00001.0000不稳定11.(a)>> z=tf('z');G=(-3*z+2)/(z^3-0.2*z^2-0.25*z+0.05);abs(eig(G))ans =0.50000.50000.2000稳定(b)z=tf('z');G=(3*z^2-0.39*z-0.09)/(z^4-1.7*z^3+1.04*z^2+0.268*z+0.024);abs(eig(G)) ans =1.19391.19390.12980.1298不稳定12.求矩阵A的特征根,判断其特征根是否全具有负实部,则稳定13.14.15.16.17.第二部分:Simulink 在系统仿真中的应用、控制系统计算机辅助设计、控制工程中的仿真技术应用(4 学时)3.4.5.6.7.8.9.。
《自动控制系统计算机仿真》习题参考答案
《自动控制系统计算机仿真》习题参考答案1-1 什么是仿真? 它的主要优点是什么?它所遵循的基本原则是什么?答:所谓仿真,就是使用其它相似的系统来模仿真实的需要研究的系统。
计算机仿真是指以数字计算机为主要工具,编写并且运行反映真实系统运行状况的程序。
对计算机输出的信息进行分析和研究,从而对实际系统运行状态和演化规律进行综合评估与预测。
它是非常重要的设计自动控制系统或者评价系统性能和功能的一种技术手段。
仿真的主要优点是:方便快捷、成本低廉、工作效率和计算精度都很高。
它所遵循的基本原则是相似性原理。
1-2 你认为计算机仿真的发展方向是什么?答:向模型更加准确的方向发展,向虚拟现实技术,以及高技术智能化、一体化方向发展。
向更加广阔的时空发展。
1-3 计算机数字仿真包括哪些要素?它们的关系如何?答:计算机仿真的三要素是:系统——研究的对象、模型——系统的抽象、计算机——仿真的工具和手段。
它们的关系是相互依存。
2-1 控制算法的步长应该如何选择?答:控制算法步长的选择应该恰当。
如果步长太小,就会增加迭代次数,增加计算量;如果步长太大,计算误差将显著增加,甚至造成计算结果失真。
2-2 通常控制系统的建模有哪几种方法?答:1)机理建模法;2)实验建模法;3)综合建模法。
2-3 用欧拉法求以下系统的输出响应()y t 在0≤t ≤1上,0.1h =时的数值解。
0y y +=, (0)0.8y =解:输入以下语句 绘制的曲线图2-4 用二阶龙格-库塔法对2-3题求数值解,并且比较两种方法的结果。
解:输入以下语句绘制的曲线图经过比较两种方法的结果,发现它们几乎没有什么差别。
3-1 编写两个m文件,分别使用for和while循环语句计算20031kk=∑。
解:第1个m文件,第2个m文件运行结果都是3-2 求解以下线性代数方程:123102211313121xxx⎡⎤⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥=⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦⎣⎦解:输入语句计算结果3-3 已知矩阵013=121542⎡⎤⎢⎥⎢⎥⎢⎥⎣⎦A,218=414332⎡⎤⎢⎥⎢⎥⎢⎥⎣⎦B试分别求出A阵和B阵的秩、转置、行列式、逆矩阵以及特征值。
(整理)控制系统数字仿真第二章习题答案
控制系统数字仿真与CAD第二章习题答案2-1 思考题:(1)数学模型的微分方程,状态方程,传递函数,零极点增益和部分分式五种形式,各有什么特点?(2)数学模型各种形式之间为什么要互相转换?(3)控制系统建模的基本方法有哪些?他们的区别和特点是什么?(4)控制系统计算机仿真中的“实现问题”是什么含意?(5)数值积分法的选用应遵循哪几条原则?答:(1)微分方程是直接描述系统输入和输出量之间的制约关系,是连续控制系统其他数学模型表达式的基础。
状态方程能够反映系统内部各状态之间的相互关系,适用于多输入多输出系统。
传递函数是零极点形式和部分分式形式的基础。
零极点增益形式可用于分析系统的稳定性和快速性。
利用部分分式形式可直接分析系统的动态过程。
(2)不同的控制系统的分析和设计方法,只适用于特定的数学模型形式。
(3)控制系统的建模方法大体有三种:机理模型法,统计模型法和混合模型法。
机理模型法就是对已知结构,参数的物理系统运用相应的物理定律或定理,经过合理的分析简化建立起来的各物理量间的关系。
该方法需要对系统的内部结构和特性完全的了解,精度高。
统计模型法是采用归纳的方法,根据系统实测的数据,运用统计规律和系统辨识等理论建立的系统模型。
该方法建立的数学模型受数据量不充分,数据精度不一致,数据处理方法的不完善,很难在精度上达到更高的要求。
混合法是上述两种方法的结合。
(4)“实现问题”就是根据建立的数学模型和精度,采用某种数值计算方法,将模型方程转换为适合在计算机上运行的公式和方程,通过计算来使之正确的反映系统各变量动态性能,得到可靠的仿真结果。
(5)数值积分法应该遵循的原则是在满足系统精度的前提下,提高数值运算的速度和并保证计算结果的稳定。
2-2.用matlab语言求下列系统的状态方程、传递函数、零极点增益、和部分分式形式的模型参数,并分别写出其相应的数学模型表达式:(1) G(s)=324327242410355024s s ss s s s+++++++(2).X=2.25 -5 -1.25 -0.542.25 -4.25 -1.25 -0.2520.25 -0.5 -1.25 -121.25 -1.75 -0.25 -0.75 0X⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥+⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦u y=[0 2 0 2] X(1)解:(1)状态方程模型参数:编写matlab程序如下>> num=[1 7 24 24];>> den=[1 10 35 50 24];>> [A B C D]=tf2ss(num,den)得到结果:A=-10 -35 -50 -241 0 0 00 1 0 00 0 1 0⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦,B=1⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦,C=[]1 7 24 24,D=[0]所以模型为:.X=-10 -35 -50 -241 0 0 00 1 0 00 0 1 0⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦X+1⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦u,y=[]1 7 24 24X(2)零极点增益:编写程序>> num=[1 7 24 24];>> den=[1 10 35 50 24];>> [Z P K]=tf2zp(num,den)得到结果Z= -2.7306 + 2.8531 , -2.7306 - 2.8531i ,-1.5388P= -4, -3 ,-2 ,-1K=1(3) 部分分式形式:编写程序>> num=[1 7 24 24];>> den=[1 10 35 50 24];>> [R P H]=residue(num,den)得到结果R= 4.0000 ,-6.0000, 2.0000, 1.0000 P= -4.0000, -3.0000 , -2.0000 ,-1.0000 H=[]G(s)=46214321s s s s -+++++++(2)解:(1)传递函数模型参数:编写程序>> A=[2.25 -5 -1.25 -0.52.25 -4.25 -1.25 -0.250.25 -0.5 -1.25 -1 1.25 -1.75 -0.25 -0.75];>> B=[4 2 2 0]'; >> C=[0 2 0 2];>> D=[0];>> [num den]=ss2tf(A,B,C,D)得到结果num = 0 4.0000 14.0000 22.0000 15.0000 den =1.0000 4.0000 6.2500 5.2500 2.2500324324 s + 14 s + 22 s + 15()s + 4 s + 6.25 s + 5.25 s + 2.25G s =(2) 零极点增益模型参数:编写程序>> A=[2.25 -5 -1.25 -0.52.25 -4.25 -1.25 -0.25 0.25 -0.5 -1.25 -1 1.25 -1.75 -0.25 -0.75];>> B=[4 2 2 0]'; >> C=[0 2 0 2];>> D=[0];>> [Z,P,K]=ss2zp(A,B,C,D)得到结果Z =-1.0000 + 1.2247i -1.0000 - 1.2247i -1.5000P= -0.5000 + 0.8660i -0.5000 - 0.8660i -1.5000 -1.5000 K = 4.0000表达式 ()()()()()4s+1-1.2247i s+1+1.2247i ()s+0.5-0.866i s+0.5+0.866i s+1.5G s =(3)部分分式形式的模型参数:编写程序>> A=[2.25 -5 -1.25 -0.52.25 -4.25 -1.25 -0.250.25 -0.5 -1.25 -1 1.25 -1.75 -0.25 -0.75];>> B=[4 2 2 0]'; >> C=[0 2 0 2];>> D=[0];>> [num den]=ss2tf(A,B,C,D)>> [R,P,H]=residue(num,den)得到结果R = 4.0000 -0.0000 0.0000 - 2.3094i 0.0000 + 2.3094iP = -1.5000 -1.5000 -0.5000 + 0.8660i -0.5000 - 0.8660i H =[]4 2.3094 2.3094() 1.50.50.8660.50.866i iG s s s i s i=-+++-++2-3.用欧拉法求下面系统的输出响应y(t)在0≤t ≤1上,h=0.1时的数值。
自动控制原理第2章练习题
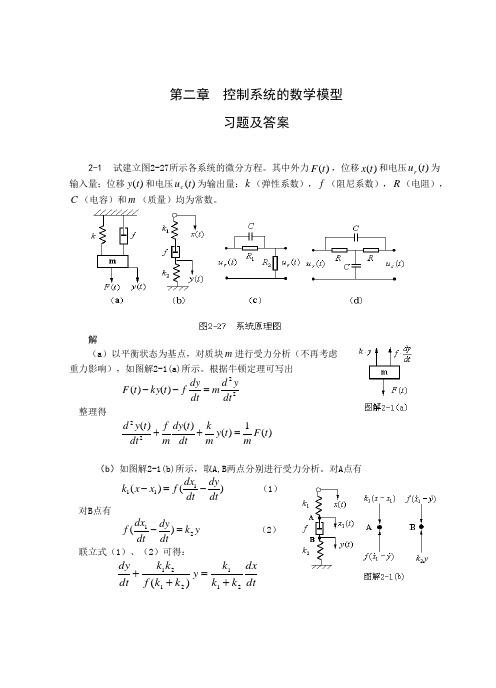
第二章 控制系统的数学模型习题及答案2-1 试建立图2-27所示各系统的微分方程。
其中外力)(t F ,位移)(t x 和电压)(t u r 为输入量;位移)(t y 和电压)(t u c 为输出量;k (弹性系数),f (阻尼系数),R (电阻),C (电容)和m (质量)均为常数。
解(a )以平衡状态为基点,对质块m 进行受力分析(不再考虑重力影响),如图解2-1(a)所示。
根据牛顿定理可写出22)()(dty d m dt dy f t ky t F =-- 整理得)(1)()()(22t F m t y m k dt t dy m f dt t y d =++(b )如图解2-1(b)所示,取A,B 两点分别进行受力分析。
对A 点有 )()(111dtdydt dx f x x k -=- (1) 对B 点有 y k dtdydt dx f 21)(=- (2) 联立式(1)、(2)可得:dtdx k k k y k k f k k dt dy2112121)(+=++(c) 应用复数阻抗概念可写出)()(11)(11s U s I cs R cs R s U c r ++= (3) 2)()(R s Uc s I = (4) 联立式(3)、(4),可解得: CsR R R R Cs R R s U s U r c 212112)1()()(+++=微分方程为: r r c c u CR dt du u R CR R R dt du 121211+=++(d) 由图解2-1(d )可写出[]Css I s I s I R s U c R R r 1)()()()(++= (5) )()(1)(s RI s RI Css I c R c -= (6) []Css I s I R s I s U c R c c 1)()()()(++= (7)联立式(5)、(6)、(7),消去中间变量)(s I C 和)(s I R ,可得:1312)()(222222++++=RCs s C R RCs s C R s U s U r c 微分方程为 r r r c c c u RC dt du CR dt du u R C dt du CR dt du 222222221213++=++2-2 试证明图2-28中所示的力学系统(a)和电路系统(b)是相似系统(即有相同形式的数学模型)。
《控制系统数字仿真与CAD》部分答案2
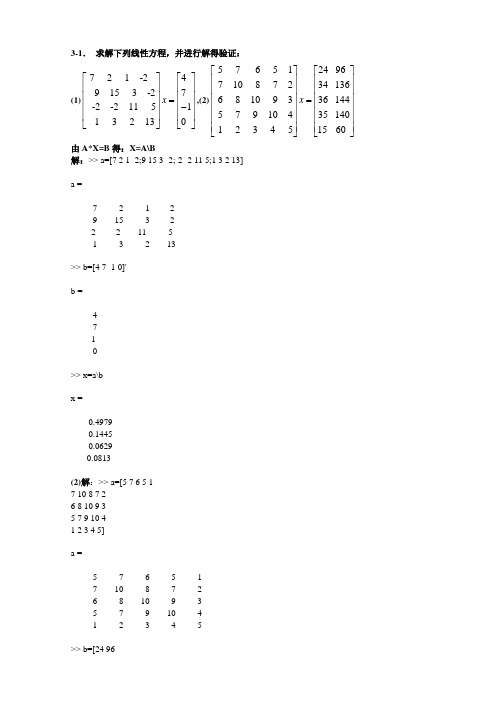
3-1.求解下列线性方程,并进行解得验证:(1)7 2 1 -249 15 3 -27-2 -2 11 511 32 130x⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥=⎢⎥⎢⎥-⎢⎥⎢⎥⎣⎦⎣⎦,(2)5 76 5 1247 10 8 7 2346 8 10 9 3365 7 9 10 4351 2 3 4 515x⎡⎤⎡⎢⎥⎢⎢⎥⎢⎢⎥⎢=⎢⎥⎢⎢⎥⎢⎢⎥⎢⎣⎦⎣9613614414060⎤⎥⎥⎥⎥⎥⎥⎦由A*X=B得:X=A\B解:>> a=[7 2 1 -2;9 15 3 -2;-2 -2 11 5;1 3 2 13]a =7 2 1 -29 15 3 -2-2 -2 11 51 32 13>> b=[4 7 -1 0]'b =47-1>> x=a\bx =0.49790.14450.0629-0.0813(2)解:>> a=[5 7 6 5 17 10 8 7 26 8 10 9 35 7 9 10 41 2 3 4 5]a =5 76 5 17 10 8 7 26 8 10 9 35 7 9 10 41 2 3 4 5>> b=[24 9634 136 36 144 35 140 15 60] b =24 96 34 136 36 144 35 140 15 60>> x=a\b x =1.0000 4.0000 1.0000 4.0000 1.0000 4.0000 1.0000 4.00001.0000 4.00003-2.进行下列计算,给出不使用for 和while 等循环语句的计算方法。
(1)632ii k ==∑解:根据等比数列求和方法,在利用matlab 中的m 文件,编写程序求解。
M 文件为 n=64;q=2;k=(1-q^n)/(1-q); disp('k 的值为'); disp(k);保存文件q1.m在matlab 命令框中输入 >> q1k 的值为 1.8447e+019(2)求出y=x*sin(x) 在0<x<100条件下的每个峰值解:画出图形>> x=0:0.01:100;>> y=x.*sin(x); >> plot(x,y); >> grid on>> title('y=x*sin(x)') >> xlabel('x') >>ylabel('y')方法1。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
控制系统数字仿真与CAD第二章习题答案2-1 思考题:(1)数学模型的微分方程,状态方程,传递函数,零极点增益和部分分式五种形式,各有什么特点?(2)数学模型各种形式之间为什么要互相转换?(3)控制系统建模的基本方法有哪些?他们的区别和特点是什么?(4)控制系统计算机仿真中的“实现问题”是什么含意?(5)数值积分法的选用应遵循哪几条原则?答:(1)微分方程是直接描述系统输入和输出量之间的制约关系,是连续控制系统其他数学模型表达式的基础。
状态方程能够反映系统内部各状态之间的相互关系,适用于多输入多输出系统。
传递函数是零极点形式和部分分式形式的基础。
零极点增益形式可用于分析系统的稳定性和快速性。
利用部分分式形式可直接分析系统的动态过程。
(2)不同的控制系统的分析和设计方法,只适用于特定的数学模型形式。
(3)控制系统的建模方法大体有三种:机理模型法,统计模型法和混合模型法。
机理模型法就是对已知结构,参数的物理系统运用相应的物理定律或定理,经过合理的分析简化建立起来的各物理量间的关系。
该方法需要对系统的内部结构和特性完全的了解,精度高。
统计模型法是采用归纳的方法,根据系统实测的数据,运用统计规律和系统辨识等理论建立的系统模型。
该方法建立的数学模型受数据量不充分,数据精度不一致,数据处理方法的不完善,很难在精度上达到更高的要求。
混合法是上述两种方法的结合。
(4)“实现问题”就是根据建立的数学模型和精度,采用某种数值计算方法,将模型方程转换为适合在计算机上运行的公式和方程,通过计算来使之正确的反映系统各变量动态性能,得到可靠的仿真结果。
(5)数值积分法应该遵循的原则是在满足系统精度的前提下,提高数值运算的速度和并保证计算结果的稳定。
2-2.用matlab语言求下列系统的状态方程、传递函数、零极点增益、和部分分式形式的模型参数,并分别写出其相应的数学模型表达式:(1) G(s)=324327242410355024s s ss s s s+++++++(2).X=2.25 -5 -1.25 -0.542.25 -4.25 -1.25 -0.2520.25 -0.5 -1.25 -121.25 -1.75 -0.25 -0.75 0X⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥+⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦u y=[0 2 0 2] X(1)解:(1)状态方程模型参数:编写matlab程序如下>> num=[1 7 24 24];>> den=[1 10 35 50 24];>> [A B C D]=tf2ss(num,den)得到结果:A=-10 -35 -50 -241 0 0 00 1 0 00 0 1 0⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦,B=1⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦,C=[]1 7 24 24,D=[0]所以模型为:.X=-10 -35 -50 -241 0 0 00 1 0 00 0 1 0⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦X+1⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦u,y=[]1 7 24 24X(2)零极点增益:编写程序>> num=[1 7 24 24];>> den=[1 10 35 50 24];>> [Z P K]=tf2zp(num,den)得到结果Z= -2.7306 + 2.8531 , -2.7306 - 2.8531i ,-1.5388P= -4, -3 ,-2 ,-1K=1(3) 部分分式形式:编写程序>> num=[1 7 24 24];>> den=[1 10 35 50 24];>> [R P H]=residue(num,den)得到结果R= 4.0000 ,-6.0000, 2.0000, 1.0000P= -4.0000, -3.0000 , -2.0000 ,-1.0000 H=[]G(s)=46214321s s s s -+++++++(2)解:(1)传递函数模型参数:编写程序>> A=[2.25 -5 -1.25 -0.52.25 -4.25 -1.25 -0.250.25 -0.5 -1.25 -1 1.25 -1.75 -0.25 -0.75];>> B=[4 2 2 0]'; >> C=[0 2 0 2];>> D=[0];>> [num den]=ss2tf(A,B,C,D)得到结果num = 0 4.0000 14.0000 22.0000 15.0000 den =1.0000 4.0000 6.2500 5.2500 2.2500324324 s + 14 s + 22 s + 15()s + 4 s + 6.25 s + 5.25 s + 2.25G s =(2) 零极点增益模型参数:编写程序>> A=[2.25 -5 -1.25 -0.52.25 -4.25 -1.25 -0.25 0.25 -0.5 -1.25 -1 1.25 -1.75 -0.25 -0.75];>> B=[4 2 2 0]'; >> C=[0 2 0 2];>> D=[0];>> [Z,P,K]=ss2zp(A,B,C,D)得到结果Z =-1.0000 + 1.2247i -1.0000 - 1.2247i -1.5000P= -0.5000 + 0.8660i -0.5000 - 0.8660i -1.5000 -1.5000 K = 4.0000表达式 ()()()()()4s+1-1.2247i s+1+1.2247i ()s+0.5-0.866i s+0.5+0.866i s+1.5G s =(3)部分分式形式的模型参数:编写程序>> A=[2.25 -5 -1.25 -0.52.25 -4.25 -1.25 -0.25 0.25 -0.5 -1.25 -11.25 -1.75 -0.25 -0.75];>> B=[4 2 2 0]'; >> C=[0 2 0 2];>> D=[0];>> [num den]=ss2tf(A,B,C,D)>> [R,P,H]=residue(num,den)得到结果R = 4.0000 -0.0000 0.0000 - 2.3094i 0.0000 + 2.3094iP = -1.5000 -1.5000 -0.5000 + 0.8660i -0.5000 - 0.8660i H =[]4 2.3094 2.3094() 1.50.50.8660.50.866i iG s s s i s i=-+++-++2-3.用欧拉法求下面系统的输出响应y(t)在0≤t ≤1上,h=0.1时的数值。
',(0)1y y y =-=要求保留4位小数,并将结果与真解()t y t e -=比较。
解:欧拉法1'00*(,)(,)()k k k k k k y y h f t y y f t y y t y+=+⎧⎪=⎨⎪=⎩(前向欧拉法,可以自启动)其几何意义:把f(t,y)在[,k k t y ]区间内的曲边面积用矩形面积近似代替。
利用matlab 提供的m 文件编程,得到算法公式。
如下所示(1) m 文件程序为 h=0.1;disp('函数的数值解为'); %显示 …‟中间的文字% disp('y='); %同上%y=1;for t=0:h:1m=y;disp(y); %显示y 的当前值% y=m-m*h;end保存文件q2.m在matalb 命令行中键入>> q2得到结果 函数的数值解为y= 1 0.9000 0.8100 0.7290 0.6561 0.5905 0.5314 0.4783 0.4305 0.3874 0.3487(2)另建一个m 文件求解t y e -=在t ∈[0,1]的数值 ( %t y e -=是',(0)1y y y =-=的真解%)程序为h=0.1;disp('函数的离散时刻解为'); disp('y='); for t=0:h:1 y=exp(-t); disp(y);end 保存文件q3.m 在matalb 命令行中键入>> q3 函数的离散时刻解为y= 1 0.9048 0.8187 0.7408 0.6703 0.6065 0.5488 0.4966 0.4493 0.4066 0.3679比较欧拉方法求解与真值的差别显然误差与2h 为同阶无穷小,欧拉法具有一阶计算精度,精度较低,但算法简单。
2-4用二阶龙格库塔法求解2-3的数值解,并于欧拉法求得的结果比较。
解:我们经常用到 预报-校正法 的二阶龙-格库塔法, 112121'()2(,)(,)(,)k k k k k k h y y k k k f t y k f t h y hk f t y y+⎧=++⎪⎪⎪=⎨⎪=++⎪=⎪⎩此方法可以自启动,具有二阶计算精度,几何意义:把f(t,y)在[,k k t y ]区间内的曲边面积用上下底为k f 和1k f 、高为h 的梯形面积近似代替。
利用matlab 提供的m 文件编程,得到算法公式。
如下所示 (1)m 文件程序为 h=0.1;disp('函数的数值解为');disp('y='); y=1; for t=0:h:1disp(y); k1=-y;k2=-(y+k1*h); y=y+(k1+k2)*h/2;end 保存文件q4.m在matlab 的命令行中键入 >> q4 显示结果为 函数的数值解为y= 1 0.9050 0.8190 0.7412 0.6708 0.6071 0.5494 0.4972 0.4500 0.4072 0.3685(2) 比较欧拉法与二阶龙格-库塔法求解.(误差为绝对值)明显误差为3h 得同阶无穷小,具有二阶计算精度,而欧拉法具有以阶计算精度,二阶龙格-库塔法比欧拉法计算精度高。
2-5.用四阶龙格-库塔法求解题2-3数值解,并与前两题结果相比较。
解:四阶龙格-库塔法表达式112341213243(22)6(,)(,)22(,)22(,)k kk kk kk kk khy y k k k kk f t yh hk f t y kh hk f t y kk f t h y hk+⎧=++++⎪⎪=⎪⎪⎪=++⎨⎪⎪=++⎪⎪=++⎪⎩,其截断误差为5h同阶无穷小,当h步距取得较小时,误差是很小的.(1)编辑m文件程序h=0.1;disp('四阶龙格-库塔方法求解函数数值解为');disp('y=');y=1;for t=0:h:1disp(y);k1=-y;k2=-(y+k1*h/2);k3=-(y+k2*h/2);k4=-(y+k3*h);y=y+(k1+2*k2+2*k3+k4)*h/6;end 保存文件q5.m在matlab命令行里键入>> q5得到结果四阶龙格-库塔方法求解函数数值解为y= 1 0.9048 0.8187 0.7408 0.6703 0.6065 0.5488 0.4966 0.4493 0.4066 0.3679 (2)比较这几种方法:对于四阶龙格-库塔方法显然四阶龙格-库塔法求解精度很高,基本接近真值。