永磁同步电机地全参数辨识
永磁同步电机参数辨识研究

永磁同步电机参数辨识研究永磁同步电机是一种具有高效率、高功率密度和快速响应等优点的电机,广泛应用于各种工业和民用领域。
为了实现永磁同步电机的精确控制和监测,需要对其参数进行准确的辨识。
下面介绍永磁同步电机参数辨识的研究内容和方法。
参数辨识的研究内容永磁同步电机的参数包括定子电阻、转子电阻、漏感电抗、定子电感、转子电感、永磁体磁化强度等。
这些参数的准确性对电机的控制性能和效率具有重要影响。
因此,永磁同步电机参数辨识的研究内容主要包括以下几个方面:(1)电机模型建立电机模型是进行参数辨识的基础,需要建立准确、简洁、适用的电机模型。
常用的永磁同步电机模型包括dq轴等效电路模型、电感电阻模型和磁路模型等。
(2)数据采集和处理对于参数辨识,需要采集电机运行时的电流、电压和转速等数据,并进行预处理,包括滤波、降噪、积分等操作,以提高数据质量和准确性。
(3)参数估计方法参数估计方法是指利用采集的数据,通过数学模型和算法进行参数估计和辨识。
常用的方法包括最小二乘法、最大似然法、粒子群优化法、神经网络方法等。
参数辨识的方法(1)基于模型的方法基于模型的方法是指根据电机的数学模型,通过采集的电机数据进行参数辨识。
常用的方法包括最小二乘法、极大似然法、扩展卡尔曼滤波法等。
这些方法需要先建立电机的数学模型,然后根据采集的数据对模型中的参数进行估计和辨识。
(2)基于信号处理的方法基于信号处理的方法是指通过对电机运行数据进行频谱分析、小波分析等信号处理方法,提取出电机运行时的特征参数,如电流的基波频率、谐波频率等。
然后根据这些特征参数进行电机参数的辨识。
(3)基于神经网络的方法永磁同步电机参数辨识是指通过对永磁同步电机的电、磁等参数进行辨识,从而实现对电机性能的优化控制。
常见的永磁同步电机参数包括:定子电阻、定子漏感、转子漏感、永磁体磁通和磁极数等。
永磁同步电机的参数辨识方法主要有两类:基于模型的方法和基于神经网络的方法。
基于扩展卡尔曼滤波的永磁同步电动机参数辨识
O 7 言 1
在 永 磁 同步 电 动机 设计 、 真 和控 制 技术 的研 仿 究 中 , 常会 用到 电机 的参数 。因此 , 数 的准确 度 经 参
的定子 电阻 R 和 、 轴电枢电感 、 的辨识。 s g
1扩展 卡尔曼滤 波原理
扩 展卡 尔曼 滤波器 ( K ) 卡尔曼 滤 波器在 非 E F是 线性 系统 中的应用 的推 广 延 伸 , 其基 本 的原 理 还是 卡 尔曼 滤波器 原 理 , 只是 在 其 基 础 上进 行 了一 系列 的线 性 化及 离散 化处 理 , 得 卡 尔曼 滤 波 器 可 以应 使
中 图分 类 号 : M3 T 3 文 献标 识 码 : A 文 章 编 号 :0 4 7 1 (02 0 - 0 9 0 10 - 0 8 2 1 ) 7 0 1 - 4
Par m e e sI n i a in ftO 0 Ba e n t nde Kam a Fi e d l n l r t
s se a e i r v d by te i l me ain fp rm ee de tfc t n y tm r mp o e h mp e ntt o o a a tri n i ai i o
Ke r s: MS ; n i e p r mee s i e t c t n; xe d d Kama l r a a y i i y wo d P M o l a a tr d n i a i e tn e l n f t ; n l ss n MAT A / i l t n n i f o i e L B S mu ai o
Ab t a t F rt ec a g ft e ee t ma n t a a t r f h u n n MS ,te e tn e a ma l ra d t e sr c : o h n e o lcr h h o g ei p r mee so e r n i g P M c t h x e d d K l n f t n h i e d d ci n o e se d - tt d lo MS we e u e o ie t y t e r ssa c n n u t n e o e moo ni e T e e u t ft ta y sae mo e f o h P M r s d t d n i h e i n e a d i d ca c ft tr o l . h f t h n
基于MRAS的永磁同步电机在线参数辨识
■技术探讨与研究TECHNIQUE RESEARCH基于MRAS的永磁同步电机在线参数辨识Online Parameter Identification of Permanent Magnet Synchronous Motor Based on MRAS Runchan Liu大连交通大学刘闰婵(Runchan Liu)摘要:在永磁电机运转过程中,电机的参数会实时发生变化,而调节器不能进行参数自校正,为了获得更好的控制效果,需要对电机的参数进行在线辨识。
本文提出基于模型参考自适应(MRAS)的PMSM在线辨识方法,建立参考模型和可调模型,利用两个模型的输出量之差/通过合适的自适应律来现对PMSM参数的辨识,在线估计定子电阻、定子电感、永磁体磁链,并通过MATLAB仿真验证可行性。
关键词:永磁同步电机;在线参数辨识;模型参考自适应;参考模型;可调模型Abstract:During the operation of permanent magnet motor the parameters of the motor will change in real time,but the regulator cart perform self-correction of paramBeters.In order to obtain better control effect,the parameters of the motor n e ed to be ide ntified online.This paper proposes a model reference adaptive system(MRAS)based on PMSM on line ide n tificati o n method,which establishes a ref e re n ee model and an adjustable model,the n uses the differe n ee betwee n the output of the two models to ide n tify the PMSM parameters through an appropriate adaptive law.Stator resista nee,stator in d u eta nee,perma nent magnet flux lin kage were estimated online and verified by MATLAB simulation.Key words:PMSM;Online par a meter ide ntificati o n;MRAS;Refere n ee model;Adjustable model【中图分类号】TM351【文献标识码】B文章编号1606-5123(2020)07-0067-051引言与传统的电励磁同步电机相比,永磁同步电机具有结构简单、体积小、质量轻、运行可靠等显著优势。
伺服系统永磁同步电机参数辨识策略
I de n t i ic f a t i o n S t r a t e g y f o r PM S M Pa r a me t e r s o f Se r v o Dr i v e
第3 1 卷 第 6期
轻 工 机械
Li e .  ̄t I nd u s t r y Ma c Mn e r y
V0 1 . 3l No . 6
2 0 1 3 年1 2 月
B 。 . 1
[ 自控 ・ 检测 ]
D O I : 1 0 . 3 9 6 9 / j . i s s n . 1 0 0 5 — 2 8 9 5 . 2 0 1 3 . 0 6 . 0 1 2
参数 的辨识策略 , 实现 电阻、 交直轴电感、 反 电势 系数等参数 的辨识 。在 一 台 1 . 2 k W 的永磁 同步 电机上 进行 了实验 , 完
成 了上述参数辨识 , 并在 辨识参数的基础上设计 了电流环调 节器。得到 的辨识参数 具有较 高的精度 , 验证 了所设 计的辨 识 策略 的有效性 , 具有一 定的 工程 实用意义。
一
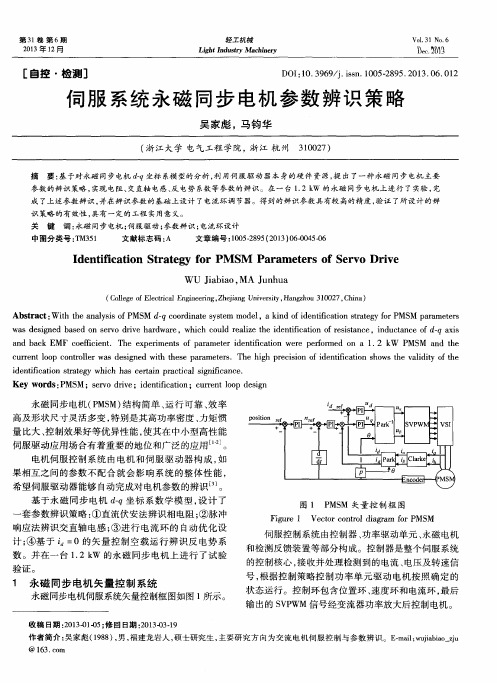
图1 P MS M 矢量控制 框 图
F i g u r e 1 Ve c t o r c o nt r o l d i a g r a m f o r PM S M
WU J i a b i a o . MA J u n h u a
( C o l l e g e o f E l e c t r i c a l E n g i n e e r i n g , Z h e j i a n g U n i v e r s i t y , H a n g z h o u 3 1 0 0 2 7 , C h i n a )
永磁同步电机参数辨识方法
永磁同步电机参数辨识方法作者:吴茂刚吴清华来源:《中国科技博览》2016年第30期[摘要]常规的永磁同步电机参数辨识方法往往忽略逆变器死区等非线性因素,影响了参数辨识的精度。
为提高电机参数辨识的精度,本文采用无死区逆变器电路辨识电机定子电阻和直轴电感,采用常规有死区逆变器电路辨识交轴电感,采用基于最小二乘的线性回归法消除逆变器死区等非线性因素的影响,从而提高交轴电感的辨识精度。
实验结果表明,辨识值接近真实值,证明了方法的有效性。
[关键词]永磁同步电机电阻电感辨识中图分类号:TM351 文献标识码:A 文章编号:1009-914X(2016)30-0387-020 引言永磁同步电机(permanent magnet synchronous motor,PMSM)广泛应用于要求有良好静态性能和高动态响应的伺服系统中,高性能永磁同步电机矢量控制系统需要准确的电机参数[1],如电流环参数整定、最大转矩电流比控制、弱磁控制和电流解耦控制等。
参数辨识方法分为静态参数辨识和动态参数辨识,区别是电机运行状态不同,静态参数辨识方法相对简单、适合工程化应用,动态参数辨识方法相对复杂,辨识精度也往往受到局限。
目前研究的参数辨识方法主要有:最小二乘法[2]、扩展Kalman滤波法[3]、模型参考自适应法[4]、人工智能方法(神经网络[5]、模糊系统[6]、遗传算法[7]等)。
本文主要解决静态参数辨识中逆变器死区等非线性因素对辨识精度的影响,而在常规辨识方法中往往会忽略该因素的影响。
常规辨识方法采用直流实验法定子相电阻。
方法是施加直轴电压矢量,待电机定子电流进入稳态,由直轴电压与直轴电流比值计算定子电阻。
因逆变器死区等非线性因素,实际电压小于给定电压,因而计算值偏大。
常规辨识方法采用直流衰减法辨识定子直轴电感。
基本原理是通过特定的回路连接对电机加入直流电压激励,然后记录电流通过电阻的衰减曲线完成对电机参数的辨识。
不足之处是,对于测试电路有特定的要求,有时候还需要接入特定的测量仪器来辅助完成测试。
永磁同步电机反电动势参数辨识
永磁同步电机反电动势参数辨识
永磁同步电机(PMSM)的反电动势参数辨识主要包括反电势系数和电感参数的辨识。
反电势系数的辨识是重要的,因为它与电机的性能直接相关。
单位转速下的空载反电势的电压值定义为电机的反电势系数。
可以通过使用另外一台电机拖动待辨识的永磁同步电机以某一恒定转速旋转,然后测量电机的输出电压,根据公式计算出反电势系数。
但这种方法需要增加的外围设备较多,通用性较差。
另一种方法是通过台架试验进行辨识。
通过测试不同转速下空载反电动势的实测数据,可以得到电机反电动势的幅值随电机转速的变化曲线。
这种方法比较准确,但需要特殊的试验设备和条件。
对于电感参数的辨识,可以通过稳态试验进行。
在转矩-转速曲线的测定试
验中,使电机在额定转速下保持稳态运行,取三组不同的转矩下定子电流的变化波形,通过一定的公式计算得到永磁同步电机的直、交轴电感值。
以上信息仅供参考,如果您还有疑问,建议咨询专业人士。
永磁同步电机参数辨识研究
华中科技大学硕士学位论文永磁同步电机参数辨识研究姓名:汤斯申请学位级别:硕士专业:控制理论与控制工程指导教师:沈安文20090527华中科技大学硕士学位论文摘要随着伺服技术在家庭生活和工业生产中的应用越来越广泛,具有高性能,高性价比的永磁同步电机伺服系统已经成为伺服控制系统的发展趋势。
由于永磁同步电机定子参数对于电机控制的性能有着极为关键的影响,于是本文针对永磁同步电机定子参数的辨识方法进行了研究。
文章首先对目前流行的永磁同步电机参数辨识方法进行了概述,并对各种方案进行了简单分析。
然后介绍了永磁同步电机的数学模型和空间磁场定向矢量控制方法,并对电机定子参数与电流控制器参数设计之间的关系进行了说明,阐述了电机参数辨识的重要性。
在这个背景下提出了一种基于离线方式下简单有效的永磁同步电机参数辨识方法。
随后在matlab/simulink中建立了仿真模型,对辨识方法的可行性进行了验证,并分析了硬件参数对于辨识结果产生的影响。
最后在硬件平台上对辨识方法进行了实现,并且针对微处理器本身的基本特点,实现了自然对数高精度计算,并利用了矩阵方程,最小二乘法曲线拟合等数据处理方法对参数辨识结果进行了优化处理,减小了实际硬件参数、采样数据偏差等因素产生的辨识误差。
初步的仿真和试验结果验证了所提出辨识方法的可行性和稳定性,说明本文研究的永磁同步电机参数辨识方法具有一定的实用价值。
关键词:交流伺服永磁同步电动机参数辨识最小二乘法曲线拟合华中科技大学硕士学位论文AbstractAs the servo technique servo technology has been applied more and more widely in family life and industry production, the PMSM servo system with both high performance and cost-performance ratio has become the future tendency of the development of servo control system. Since the stator parameters of the PMSM have a significant affect on the performance of motor control, the thesis focuses on the research of the stator parameters identification of the PMSM servo system.Firstly the thesis generally illustrates the popular parameter identification methods of the PMSM in the contemporary world. It also makes a brief analysis of each method. Then the mathematic models of PMSM and the methods of FOC are introduced,what’s more, the thesis states the relationship between motor parameters and the design of current controller parameters, explaining the importance of the motor parameters identification. Under this background an easy and effective PMSM parameters identification method based on the off-line mode is introduced in the thesis, additionally, by making the relevant emulator models in the matlab/simulink platform, the feasibility of the identification method is proved and the influence on the results of identification caused by the hardware parameters is taken into consideration. Finally the identification method is carried out on the hardware platform, based on the fundamental characteristics of the micro processor itself, the test implements the high precision calculation of the natural logarithm, also, by making use of the matrix equation, the curve fitness of the least square modeling and other calculation methods in order to form an optimized process on the outcomes of the parameter identification, the test reduces the identification errors caused by some factors, such as real hardware parameters and sampling data difference.Elementary emulator and the results of the tests have proved the feasibility and stability of the parameter identification which is introduced, indicating that the research on PMSM parameter identification method in this thesis does have practical values.Keywords: AC Servo PMSM Parameter Identification Least Square Modeling Curve Fitness独创性声明本人声明所呈交的学位论文是我个人在导师指导下进行的研究工作及取得的研究成果。
基于MRAS的改进永磁同步电机参数辨识方法
法可有效 提高辨识 结果的收敛速度 。 关键 词 :永磁同步电机 ;模型参考 自适应 ;参数辨识
中图分类号 :T M 3 4 1 ; T M3 5 1 文献标志码 :A 文章编号 :1 0 0 1 — 6 8 4 8 ( 2 0 1 4 ) 0 2 — 0 0 2 9 - 0 4
.
( H a r b i n I n s t i t u t e o f T e c h n o l o g y S h e n z h e n G r a d u a t e S c h o o l ,S h e n z h e n 5 1 8 0 5 5 ,C h i n a )
第4 7卷 第 2期
2 01 4正
截 ' I } 杠
基于参数辨识技术的永磁同步电动机参数测定
关键词 :永磁 同步 电动机 ;参数辨识;最 小二乘法
中 图 分 类 号 :T 5 M3 l 文献标识码:A
为 发展 趋 势 n ,这 一 工作 的前 提 即 是精 确 确 定永 磁 同 步 电动机 相 关参 数 。 由于采 用 实验 的方法 无 法 直 接测 定 永磁 同步 电动 机 的转 子参 数 , 因此 本文 基
Nd e P S d n i e y t e a p o c e p e i e I s F B M M i e t d b p r a h a r c s . ti i f h r
s o a ep o o e p r a h i ai d e e t e h wn t t r p s d a p o c s l a f ci . h t h v dn v
摘要 :精确测 定永磁 同步 电动机参 数具有重要 意义 。基 于 由0数学模 型与直流 衰减实验 ,采用最 小二乘 参数辨识 方 法, 测定 了一 台 75 W Nd e .k F B永磁 同步 电动机 的若干参数。 通过实 验结果 与计算机仿真 结果 的对 比分析 可以看 出,所
辨 识 的参 数 是准 确 可靠 的 。
SUN ・i Lil ng,XU ・ ing,LIHe m i Bo q a - ng
( p r n f l t c l n ie r g Not hn lc i P we i es y a dn 7 0 3 hn ) De at t E e r a E gn ei , r C iaEe t c o r v ri ,B o ig0 1 0 ,C ia me o ci n h r Un t
维普资讯
第 2 卷 第 4期 9
20 0 2年 l 0月
《2024年永磁同步电机的参数辨识及控制策略研究》范文
《永磁同步电机的参数辨识及控制策略研究》篇一一、引言随着电力电子技术的飞速发展,永磁同步电机(PMSM)作为高效、节能的电机驱动系统,在工业、交通、航空航天等领域得到了广泛应用。
然而,永磁同步电机的性能和效率受到其参数辨识和控制策略的深刻影响。
因此,对永磁同步电机的参数辨识及控制策略进行研究,对于提高电机性能、优化系统运行具有重要意义。
二、永磁同步电机参数辨识1. 参数辨识的重要性永磁同步电机的性能和运行状态受到其参数的影响,如电感、电阻、永磁体磁链等。
准确的参数辨识对于电机的控制、优化设计以及故障诊断具有重要意义。
2. 参数辨识方法(1)传统方法:通过电机设计参数和实验测试获得,但受环境、温度等因素影响较大。
(2)现代方法:利用现代信号处理技术和智能算法,如最小二乘法、卡尔曼滤波器、神经网络等,对电机运行过程中的数据进行实时辨识和更新。
3. 参数辨识的挑战与解决方案在参数辨识过程中,如何提高辨识精度、降低辨识误差、适应不同工况是主要挑战。
针对这些问题,可以通过优化算法、提高采样精度、引入多源信息融合等方法进行解决。
三、永磁同步电机的控制策略研究1. 控制策略的种类与特点永磁同步电机的控制策略主要包括矢量控制、直接转矩控制、模型预测控制等。
矢量控制具有高精度、高动态响应的特点;直接转矩控制具有转矩响应快、控制简单的优点;模型预测控制则具有较好的鲁棒性和适应性。
2. 控制策略的优化与改进针对不同应用场景和需求,可以对控制策略进行优化和改进。
例如,通过引入智能算法,如模糊控制、神经网络控制等,提高电机的自适应性和鲁棒性;通过优化算法参数,提高电机的能效和运行效率。
3. 控制策略的挑战与未来方向在控制策略研究中,如何提高系统的稳定性和可靠性、降低能耗是主要挑战。
未来研究方向包括:深度学习在永磁同步电机控制中的应用、多源信息融合在电机控制中的研究等。
四、实验与分析通过搭建永磁同步电机实验平台,对上述参数辨识及控制策略进行研究与验证。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
永磁同步电机的参数辨识本文主要是在逋用变频器上实现永磁同步电机的矢星控制,对于通用变频器而言,变频器所带的电机是未知的,不冋的电机有不同的电机参数.由图N3可知,要想使得永磁同步电机矢量挖制系统有较好的稳応运行特性及动态响应特性,就需蔭电机参数耕确可知.电机帯负我时的转动惯宣与转谏调节器的PI参敌幣定密切相关.而电流调书器P【塞数的确运需要电机的电松电阻、交宜轴也感、永碰休磁链尊参数*圉外学者很¥就开始研究永磁同步电机参数辨识的方法*片且生杀统”始运彳亍之挤系统可以白动通过特定的算法対永陋冋步电机慕数进fj辨识,然后对驰动器的各控制参数址行自整定,从而不需要丁程人页铲对不冋的电机而对衆动讎村黃参敎进厅手胡贷協大大増運『驱动器的適用性…本章节主突介绍永破同步电机电枢电阻Rs. dq轴电感、风碣休厳链(即反电势系数)的离线辨识(Off-lineAutoTiming)方法*4.1电机参数的辨识原理4.1.1电枢巾阻的辨识原理定义电枢电阻尬为定子每爬的电阴*采用貞滾测试对电枢电阻进行参数辫识。
从水磁同步电杠的基木结构可以看出,当通过逆变器旬电机施加•个方向固定、幅值不变的电压矢量时*电机的三相电流精会恨快达刊-个免定值且电机前止。
由于输入的是豆流电流.定子绕组的电抗值为零,定子绩组用当于个纯电粗。
下图为电枢电阳辨识实验的等盘图.债设电流表读数为4电压表读数為U”则心・厶・厶=人=-0.5乙,子是得到琨阻的计谆表达式如下1(4 1)4J.2交直轴电感的辨识原理在进行电枇电駅辨讲时,当定子电液达到稳定俏后,永確同步电机的转子N极将会转到与施加的定子电压矢量相同的位託•这时所施加空间电压矢量的位遥即为d 轴位 置。
这时根振水磁冋步电机在两和旋转坐标系下的数学模型,当电机转速为零时,式(110)可化简得到下式:di,%=RJd+Ld 才(4.2)对于电压阶跃输入时的电流响宜为: (43)其中ZU/R,为稳态时的屯流值,心为屯机的电枢电阴,—为待辨识的d 轴电 感。
通过记录◎的匕升过稈可计尊出肖.轴电憋。
由第2章的介绍可知,对于表贴式永磁 同步电机而言,交直轴电感基本是相等的,所以只需辨识其中一个即可。
4.13反电势系数的辨识原理单位转速下的空較反电势的电压值定义为电机的反电势系数,笊位V/Krpm ・梵计 舁公式为:K v = E/n(4.4)其中,E 为空载反电势,单位V : ”为对应的转速,单位Krpm 。
反电势系数其实就是转子永磁逆链,只是单位不同,永磁磁链卩/的单位是Wb, 其计算公式为屮广Eb, E 空我反电势,玳位V ; 3为转子•碇转机械角速度,单位是 rad/so 永磁磁链与反电势系数间的换算关系如下:由反电势系数的定义就能很容易想到一种反电势系数的耕识方法,即使用另外一台 电机拖着待辨识的永磁同步电机以某一恒定转速(假设是n (单位:Krpm )的转速)旋 转,然后测得电机的UV 端的输出电压(假设是E (单位:V )),根据式4.4就能计算 出反电势系数。
用这种方法确实能够比较粘确的辨识出永磁同步电机的反电势糸数,但 同时也能发现这种方法需耍增加的外囤设备太参(需要另外一台速度可辅确控制的电 机,以及电压测虽装置等),通用性较差,所以不太适合辨识反电势系数。
这里给出一个工程上计算PMSM 的反电势系数的经验公式,此公式是根据安川 A1000的变频器经过多台永磁同步电机的实验结果幷总结规律所得。
(4.6)JC 中,耳为电机额定功率(单JT5»10叫 (4.5)位:W),勺为极对数,九为额定频率(单位:Hz), 打为额定电流(单位:A), K为修正系数,取9.62.对多家厂商生产的永磁同步电机的参数进行了验证,利用式(4.6)计算出来的反电势系数与厂商给定的反电势系数的谋差基木维持在±15%以内,所以可以用式(4.6)的计算法代替上文提及的反电势系数的辨识方法W可。
4.2电机参数的辨识方案上节中阐述的永磁同步电机参数的辨识原理均在理论上成立,但在实际系统中,有许多不利因素限制了上述算法的直接使用,并严重影响辨识结果的准确性和稳定性.这些不利因素主要有:(1)死区造成的电压损失和电流波形畸变;(2)开关器件的导通压降;(3)PWM方式产牛的电流纹波;(4)PWM方式使电机贴好的彫响加剧;(5)电机参数在不同的电源频率和载波频率时会有变化。
以下对如何在永磁同步电机矢量控制系统中炙现电机参数的辨识作详细说明。
4.2.1电枢电阻的辨识方案根据PMSM在两相静止坐标系下的电压方程式(2.5)可知,% = RJa +如a/力,当向电机定子绕组注入直流电压且电机静止时,感应电压为零,即所以电压方程变为:U a = RJ a,根据给定的电压和实测的电流值就町计算得到电阻值,R严Ua"a。
根据图4.2可知,Rs的辨识过程是以电流为目标,给定某-个固定的电流值,通过P1调节器给出需要的电压值,再经过SVPWM的运算,通过逆变益向永磁同步电机注入相应的直流电压.为了消除部分死区效应的彩响和开关器件产生的电压损耗,可采用差分的算法来辨识电枢电阻。
其具体做法是:向电机注入两段方向相同、幅值不同的直流电流厶“仁⑺(这里取A KW U—=°・38乙),通过PI调节器分别得到所希耍的电压值.再检测出实际电流值,利用差分算法就能计第出电枢电配值C 电枢电阻 计算公式如下:其中,%、I aredl 为第一次注入宜流电压时的给定电压、反馈电流值,J 、l area/2 为第一次注入貞流电压时的给定电压、反馈电流值,K&为可手动调节的电机电阴辨识 结杲的修正系数'此差分览法虽然可以去除部分死区和开关器件产生的电压损失的彩响•但是仍存在 误差,而有些误差的存在是不可避免的,以下一一列出.(1》在不同的电流幅值下,输入电压的损失并不是完全固定不变的,由此引入了 一定的电压计算误差;(2) 逆变器是以PWM 方式控制电流的,电压和电流并不是理想的直流,必然含 有戟波频率的谐波分鼠(较波坝率的倍数的谐波可忽略人而披波频率的谐波分虽首先 在直流电流中产生纹波,在同步PWM 方式中,会产生电流检测谋差:(3) 谐波分量将使电抗值不再为零,因此,即使以墊分的方式计算Rs,仍需要对 最终的辨识值进行修正。
在软件中实现旳妾注帝以下几点:(1) 对电流做PI 控制输出电压吋,前段使用较大的系数,以加速电流上升速度, 减少参数辨识时间,后段使用较小的系数,加强电流波形的稳定杵:(2) 电压给定值和电流检测值均需做大滤波处理,使用同样的滤波系数,以相兀 抵消低通滤波算法造成的衰减及精度损失;(3) 在电流稳定段,记录多组电压和电流值,用其均值做虽终的Rs 计算。
4.2.2 dq 轴电想的辨识方案根嶠4.1.2竜节阐述的d 轴电感辨识原理,可制定出如下d 轴电感的辨识方案:在电枢电阴辨识完成对,电机的转子N 极是U 相所在的位置,此时紧接着电枢电 阻的辨识方案,向电机施加U 相直流电压矢量,此时电机转子是不转动的,直轴电流 将随Z 变化。
根据戎(4.3)所示,只要记尿此吧的电流随时间的变化规律,并结合给 定电压值以及上一步参数梆识出來的电版电阻值就能计算"Id 轴电感值.但是,苗于指 数函数的实现不易.这卑可•取某些恃殊点来计算貫轴电敬中式4.3可知,电流匕升至 稳态值的0.632 ( 1-e *)倍时,电感和电阻的关系可写成:L d = Z 0.632 - RS <4.8)式中「0632为电流上升至稳态值的0.632倍时所需要的时间•而直轴电感辨识的上要 忖标就棗中于『0.632的获取。
-I areal] area/2 (4.7)根堀以上方案可辨识出永磁同步电机的d 轴电感,具体的实现框图如图4.3所示:图4.3貢轴电感的辨识框图 图中.为辨识申.阻时,目标电流为额定电流时,P1凋节器计算出的对应的电压 值。
软件实现时,需注意以下几点:(1) 由丁低通滤波必然来带相位滞后和幅值的衰减,所测得的时间心&2误差较大, 所以用此种方法测电感不可以加低通滤波:(2) 不建议使用太小的载波,否则精度不够,以4K 载波为例,每采差一个点时间 就相差0.25ms 则电感值的误差就增加(0.25*Rs) mH,这里可取10K 波频率;(3) 直轴电感的辨识紧接着电枢电阻的辨识Z 后,所以辨识之前无需进行转子定 位,但是对丁直轴电感的辨识,所施加的电压方向必须与辨识电阻的电压方向冋向,否 则辨识貢轴电感时转子亦会转动,辨识结果不对;(4) 由于辨识直轴电感时,d 轴与a 轴重合,且电机骄止不动,所以可以用a 轴 的电流变化率来计算d 轴电感;(5) 实际的采样电流值足离散的,采得的电流值不一定刚好有0.632产,软件算 法需要实现冃标就是获得0.632 /*这个电流值附近的点,首先设遗一个绝对偏差量£ , 当|0.632•产弋|<£时,记录下此电流心对应的时间用于计算电感,£的大小决定了 辨识结果的精度和成败,若设置太小,则有可能一个点都采不到;若设置太大就会采冯 好几个点。
对于某个特定的£,采得的点就需要进行筛选和处理,这样才能辨识出比较 准确的直轴电感值。
4.3参数辨识的实验波形及结果i —nri a Lit / 0.632•广一3s/2s .43.1参数辨识的实验波形閃为在辨识电枢电阻及d轴电感时,向电机输入的白流电压欠磧的力向都是U相, 所以UVW三相电流应满足厶=I w = -0.5乙,图4.4和图4.5也说明了这一点。
如图4.4所示,在辨识电枢电阻时,第-段以打出1倍额定电流为目标,第二段以打出0.38倍的额定电流为目标,分别经过PI调节器的调节,算出给定的电压值.在第一段和第二段电流平稳阶段,毎隔5ms取一次电压和电流值,共取20个点,然后对这20个点的电压、电流求平均值,然后依据式(4.7)就能计算出电机电阻。
如图4.5所示,在辨识完电枢电阻后,继续向电机注入辨识电枇电阻时,额定电流对应的电压值。
当注入这个电压值时,由于定子绕组的电感作用,电流是逐渐上升的,在电流上升的过程中,不断对电流进行采样(lOOus采样•次),当采得的电流值满足| 0.632 /*-/… |V£时,记下此时的采样时间点,该时间就足辨识的d轴电感需耍的0632, 然后依据式(4.8〉就能计算出直轴电感值.木永磁同步电机矢量控制系统所使用的SPMSM的技术参数如下衣:表4.1水磁同步电机技术参数参数名称参数值电机型号:GK6064-6AC61额定转速:2000rpm额定电压:380V额定电漩: 1.8A额定功率:0.75Kw转子惯気: 6.7M04kg.m2根据上表的参数及式(4.6)可计算岀反电势系数为:1203V/Krpmo下表给出基于上述参数原理及方案的辨识结果(注:式(4.7)中的修正系数Koc 取1.即不修正人表4.2永磁同步电机的参戟辨识结果。