三维纳米级微动工作台的设计与分析
超精密工作台洛伦兹电动机优化设计
0引 言
近年来 集成 电路制造 装 备 和超精 密加 工设 备技 术不 断发展 。例 如 , 目前 用 于制 造 3 0IT 圆 的 0 I T I晶 I
主流 步进 扫描光 刻 机生产 率 一般 大于 1 0片/ 4 小时 , 这对驱 动 电机提 出了更 高 的加速度 和 快速 响应 性 能 要求 j 。在 集 成 电路 制 造 装 备 和 超 精 密 加 工 设 备 等领域 中 , 由粗 动 台 和微 动 台组 成 的 采 用气 浮轴 承
应强 度分 布 。
较 小 的电气 时间常数 以及 轻量化 的结 构 。为满 足超 精 密工作 台激光 干 涉仪 的测 量要 求 , 要 减小 洛 伦 需
ቤተ መጻሕፍቲ ባይዱ
使 用 C M O hp yi O S L Mu ihs s电磁 场分 析 模 块 对 c
兹 电动机在 工作 过程 中 的发 热功 率 , 而减 小 对 周 从 围温度 场分 布 的影 响 。
…
一
壁 …2 主 … 0 1 1
… … …… .. … … … … … …… … … .… . .
…
超 精 密 工 作 台洛 伦 兹 电动 机 优 化 设 计
刘 羽 , 张 鸣, 朱 煜
( 清华 大 学 , 京 10 8 ) 北 0 0 4
摘
要: 洛伦兹 电动 机广泛应用于超精密制造装 备中 。为提高 洛伦 兹 电动 机的推力 输 出和快 速响应性 能 , 降低
很 多学 者对 于洛 伦兹 电动 机 的优化 设计 进行 了
l a 合仿 真 的方 法 , 现 了对一 种用 于 驱动六 自由 b联 实
度超 精密 工 作 台微动 台的洛 伦兹 电动机 尺 寸参 数 的 优化 设计 。实验 表 明 , 化 后 的 洛伦 兹 电动 机 推 力 优 可 以达到 2 . / 同时保证 电气 时间常数小于 Ii 。 超 63N A, s 精 n
七、柔性铰链微动机构的分析与设计

七、柔性铰链微动机构的分析与设计一. 实验目的1.认识柔性四连杆机构的形貌2.了解柔性铰链工作台的工作原理及应用前景3.掌握柔性铰链的分析与设计方法4.掌握微位移工作台的分析与设计方法二. 柔性铰链微动机构的用途与发展前景由于宇航和航空等技术发展的需要,对实现小范围内偏转的支承,不仅提出了高分辨率的要求,而且对其尺寸和体积提出了微型化的要求。
人们在经过对各类型的弹性支承的实验探索后,才逐步开发出体积小无机械摩擦、无间隙的柔性铰链。
随后,柔性铰链立即被广泛地用于陀螺仪、加速度计、精密天平、导弹控制喷嘴形波导管天线等仪器仪表中,并获得了前所未有的高精度和稳定性。
如日本工业技术院计量研究所,利用柔性铰链原理研制的角度微调装置,在3分的角度范围内,达到了1000万分之一度的稳定分辨率。
近年来,柔性铰链又在精密位移工作台中得到了实用。
柔性铰链微位移机构具有较高的位移分辨率,再配合压电陶瓷驱动器可实现微小位移,可适合各种介质环境工作。
微位移技术直接影响到微电子技术等高精度工业的发展,如微电子技术随着集成度的提高,线条越来越微细化,与之相对应的工艺设备:光刻机、电子束和x射线曝光机等,其定位精度要求为线宽的1/3~1/5,即亚微米甚至纳米级的精度,这就要求精密工作台具备相应的技术水准,柔性铰链是关键技术之一。
三. 柔性铰链工作台的结构a) 单柔性四连杆b) 双柔性四连杆图7-1 单、双柔性四杆机构变形原理图为保证位移方向的直线性,柔性工作台一般由平行四杆结构的铰链组成。
单柔性平行四杆机构沿一个移动方向产生位移时,在其垂直方向同时产生一个交叉耦合位移,参见图一中的Δ,且随柔性铰链弯曲偏转角的增大而增加,而双柔性平行四杆机构(图7-1b),由于结构对称,当沿一个方向受力产生位移时,两侧铰链均产生交叉耦合位移。
即:如果加工完全对称,双柔性平行四杆机构能产生严格的直线运动,从原理上克服了单柔性平行四杆机构易产生交叉耦合位移的缺陷,是超精密定位系统的首选结构,双柔性工作台结构参见图7-2。
微动工作台的分类和组成

1.2 微动工作台的类型及主要组成微动工作台根据其工作原理和驱动方式的不同可分为以下几种。
1.2.1 扭轮摩擦传动式微位移平台扭轮摩擦传动式微位移机构是利用扭轮摩擦传动机构实现微位移机构。
一般的摩擦传动方式是将驱动摩擦轮展开为直线运动,运动分辨率有限。
当将摩擦副的主动轮与从动杆母线交角从直扭轮摩擦传动图图二角减小为一很小的角度时,形成的摩擦副即为扭轮摩擦副,利用扭轮摩擦副做成的传动机构称扭轮摩擦传动机构,它可以得到很小的导程和纳米级的运动分辨率和定位精度,具有运动平稳、无间隙和无爬行等优点。
我们研制的扭轮摩擦传动机构示意图如图1所示,其导程小于0.2mm,若选用高运动分辨率的电机,则可达在250mm范围内得到纳米级的运动分辨率和定位精度。
它可应用于许多超精密传动领域。
1.2.2 机械传动式微位移平台机械传动式微位移机构是一种最古老的机构,在精密机械和仪器中应用很广,其结构形式较多,主要有螺旋机构、杠杆机构、契块凸轮机构以及它们的组合机构。
但因机构中存在机械间隙、摩擦磨损以及爬行现象等,所以运动灵敏度和精度都很难达到高精度,所以该机构只适宜于中等精度。
螺旋式微动机构简图图三差动螺旋式微位移机构图四1.2.3 螺旋式微位移平台螺旋式微位移机构的结构简图如图2所示,其结构简单、制造维修方便,它是利用螺旋传动原理米获得微小直线位移,转动手轮l转动经螺杆2将螺旋运动转换为直线运动。
运动件的直线位移J与手轮转角中关系为:J=±—}·≯因此,若螺杆螺距f已定,在螺杆与螺母配研和传动平稳时,控制妒的大小即可得到微位移,其精度可达l 0 u m。
它广泛应用于微调和测量机构,如千分尺等。
为了得到更高精度的微位移,就采用如图3所示的差动螺旋式微位移机构。
它的螺杆l有两段螺距分别为,2和f,的螺纹,f2大于,。
且螺旋方向相同,则螺母2的微位移(即输出位移)s为:s=(f2一f1)/(2)式中西为手轮转角,若屯和f】分别为0.75mm和0.7mm,其差值为O.05mm,手轮的圆周刻度分划为50格,则手轮转动1格时,在螺杆与螺母配研和传动平稳以及零件达到加工精度时,运动件的位移量为1 u m。
基于广义预测控制算法的微装配精密平台设计
.
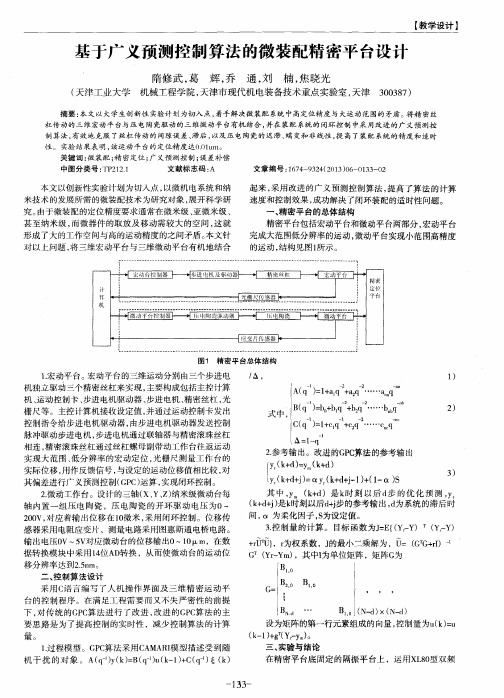
二、 控制算法设计 采用c 语言编写 了人机操作界面及三维精密运 动平
G=
B2 0
.
B1 。
.
台的控制程序。在满足工程需要而又不失严密性的前 提 下, 对 传统的G P C 算法进行 了改进 , 改进的G P C 算 法的主
r _ - = 百 i
曼
L .. . ,... . .一一 ..,. 一一.一 .。,.. 一. 一 .. . …
L 拦 丑l 工J ’
. . ,.一
.一一..... 一一.一一一. ...,一.. 一 . .. .一.+
图 1 精 密 平 台总体 结构
杠传动的三维宏动平 台与压电陶瓷驱动的三 维微动平 台有机 结合 , 并在装 配 系统 的闭环控制 中采 用改进 的广义预测控 制算 法 , 有 效 地 克服 了丝杠 传 动 的 间 隙误 差 、 滞后 , 以及 压 电陶 瓷 的 迟 滞 、 蠕 变和 非 线性 , 提 高 了装 配 系统 的精 度 和 适 时
【 y ( k + d + j ) =q Y ( k + d + j — 1 ) + ( 1 一 ) S
其 中, Y ( k + d )是k 时 刻 以后 d 步 的优 化 预测 , Y
( k + d + j ) 是k 时刻以后d + j 步的参考输 出, d 为系统 的滞后时
【 教学设计 】
基于广 义预 测控 制算 法 的微 装配精密平 台设计
隋修武 , 葛
( 天津工业大学辉, 乔ຫໍສະໝຸດ 通, 刘楠, 焦晓光
3 0 0 3 8 7 )
机械工程学院, 天津市现代机电装备技术重点实验室 , 天津
摘要 : 本 文 以 大 学 生创 新 性 实验计 划为 切入 点 , 着 手 解 决微 装 配 系统 中 高定 位精 度 与 大运 动 范 围 的矛 盾 。 将 精 密丝
磁悬浮式纳米级微动工作台的理论分析与建模研究

第2卷 第 9 7 期 20 年 9 06 月
V0 . 7 No 9 12 .
Se p. 2 6 00
磁 悬 浮 ห้องสมุดไป่ตู้ 纳 米 级 微 动 工 作 台 的理 论 分 析 与 建 模 研 究
陈本 永 雷 勇 李延 宝 张丽 琼 王俊 茹 冯 平
( 江理 工 大 学 纳 米 测 量 技 术 实 验 室 杭 州 3 0 1 ) 浙 10 8
仪 .浮 三 摘 要 磁 式微 动 工 作 台 由 于运 动 平 台和 驱 动 机 构 采 用 非 接 触 式 的 磁 悬 浮 驱 动 技 术 而 易 于 实 现 大 范 围 纳 米 级 精 度 的微 运 悬
{ 8
动 。本 文 构 建 了 一 种 新 型 的磁 悬 浮微 动 工 作 台 , 理 论 上 对 磁 悬 浮 式 微 动 工 作 台的 运 动 机 理 进 行 了详 尽 分 析 , 立 了磁 悬 浮 式 从 建 微 运 动 的 电 磁 驱 动 模 型 , Malb对 磁 悬 浮 式 微 动 工 作 台 的 运 动 控 制 进 行 了 仿 真 研 究 , 果 表 明 , 计 的磁 悬 浮 式 微 动 工 作 台 用 t a 结 设
t 能 达 到纳 米 级 的微 运 动 。本 文 的研 究 成 果 为 磁 悬 浮 式 微 动 工作 台的 设 计 及 其 控 制 提供 了 理 论 基 础 。
器
艾
关 键 词 磁 悬 浮 微 动 工 作 台 理 论 分 析
中 图 分 类 号 T 3 . 文 献 标 识 码 A H1 3 3
报 _ Che e yo g 蚕 nB n n
Le Yo g Li n a Z a g Liin W a gJ n u Fe g P n i n Ya b o h n qo g n u r n ig
新型微动工作台的设计与计算
( 合肥工业大学 机械与汽车工程学 院, 安徽 合肥 200) 3 0 9
摘
要 : 章设计 了一种新型压电式双 自由度微位移工作 台, 出了一种 采用直角双杆 机构 代替平行 四杆机 文 提
构实现双 自由度运动的方 法 ; 基于卡 氏第 二定理推导 了新型工作 台在不同方向上的输 出刚度解析 表达式 , 在 此基础上推导 出了工作 台的前 2阶固有 频率 ; 根据得到 的输 出刚度表 达式 , 定量地分析 了柔性 铰链参 数及 连 杆长度对工作台输出刚度的影 响; 同时针对 3 组不 同尺寸参数 的工作台 , 采用有 限元法对其进行数值计算 , 并
t e r t a a c lto . Th e u t f t e t e h d r n g o g e m e t h o e i lc lu a i n c e r s ls o h wo m t o s a e i o d a r e n ,wh c n ia e h t ih idc ts t a t e t e r tc l h h o e ia d l r o r c . mo e s a e c r e t Ke r s m ir - t n s a e l x r i g ;v ri a wo b r m e h n s ;FEA y wo d : c o mo i t g ;fe u e h n e e t l o c t - a c a im
第3 1卷 第 1 0期
20 0 8年 1 0月
合 肥 工 业 大 学 学 报 (自然科 学版)
J OURNAl OF HEF EIUNI VERS TY CHNOLOGY I OF TE
Vo . 1No 1 13 . O
0c . 2 0 t 0 8
三维纳米材料概述
三维纳米材料概述三维纳米材料是一类由纳米尺度的基本单元组成的材料,具有三维空间结构的特点。
纳米尺度是指材料的尺寸在纳米级别(一般为1-100纳米)上,这样的材料具有许多独特的性质和应用潜力。
三维纳米材料在多个领域,如能源、电子、光学、催化等方面具有广泛的应用前景。
三维纳米材料的制备方法多种多样,常见的方法有湿化学方法、气相沉积法、物理蒸发沉积等。
其中,湿化学方法是最常用的制备方法之一、这种方法可以利用溶胶-凝胶法、水热法、气溶胶法等将纳米材料生长到三维结构中。
例如,通过溶胶-凝胶法可以制备出具有高度有序孔道结构的三维纳米材料。
而利用水热法,则可实现在水相条件下合成具有复杂形貌的三维纳米材料。
三维纳米材料具有一系列独特的性质。
首先,三维纳米材料具有大比表面积,这是因为纳米粒子的尺寸小,而且在三维结构中纳米颗粒之间经常存在间隔和空隙,因此相同质量的三维纳米材料比二维或三维纳米颗粒具有更高的表面积。
这使得三维纳米材料在吸附、催化等过程中拥有更好的活性。
其次,三维纳米材料具有优良的导电性和导热性,这是由于纳米材料在三维结构中的负载和界面相互作用。
这使得三维纳米材料在电子器件和热管理中具有广泛的应用前景。
此外,三维纳米材料还具有优异的力学性能,如高强度、高韧性和低密度等,这使得其在结构材料中具有潜在的应用价值。
三维纳米材料在能源领域具有广泛的应用前景。
例如,利用三维纳米材料可以制备出具有高比表面积和多孔结构的电极材料,用于锂离子电池和超级电容器中,以提高储能密度和循环稳定性。
此外,三维纳米材料还可以用于制备高效的太阳能电池材料,利用其优异的光电特性来收集和转换太阳能。
在催化领域,三维纳米材料可用于制备高效的催化剂,用于清除有害气体、降解废水和增加化学反应速率等。
此外,三维纳米材料还可以应用于生物医学领域,用于药物传递、组织工程和生物传感等。
然而,三维纳米材料的制备仍面临一些挑战。
首先,制备纳米尺寸均一、结构有序的三维纳米材料仍然是一个难题。
三维技术在电力电子设备的研发中的应用
三维技术在电力电子设备的研发中的应用三维技术指的是将物体或者空间在三个方向上进行全方位的描述和展示的技术手段。
在电力电子设备的研发中,三维技术的应用可以为工程师提供更直观的设计方案和更准确的模拟数据,有助于提高设备的性能和稳定性。
本文将探讨三维技术在电力电子设备研发中的应用,并介绍一些具体的案例和实践经验。
1.提供直观的设计方案电力电子设备的设计通常需要考虑多个因素,包括功率密度、散热、EMI等。
传统的设计流程主要依靠二维图纸和计算模拟,工程师需要通过纸面或者屏幕上的平面图来理解设备的结构和布局,这样的设计过程会存在一定的局限性。
而通过三维技术,工程师可以直接在电脑上建立三维模型,并在其中进行设计和优化,这样可以更直观地理解和分析设备的结构和性能,为优化设计方案提供更有力的支持。
2.准确的模拟和分析在电力电子设备的研发过程中,需要进行很多的仿真和分析工作,以验证设计方案的可行性和稳定性。
传统的仿真工作通常通过有限元分析等方法进行,这些方法通常只能提供局部的信息,很难全面展现设备的复杂结构和性能。
而通过三维技术,工程师可以建立真实的三维模型,并在其中进行电磁场、热分析等多个方面的仿真工作,从而获得更准确和全面的仿真结果,为设计方案的优化提供更可靠的依据。
3.提高工程效率和降低成本利用三维技术进行设备设计和仿真可以显著提高工程效率。
传统的设计流程需要花费大量的时间和人力在绘图和仿真上,而通过三维技术,可以有效地减少设计和仿真的时间成本,同时也可以避免一些由于设计缺陷导致的重新设计和调试成本,从而降低了研发过程的成本。
二、具体案例和实践经验1.三维技术在变流器设计中的应用电力模块是电力电子设备中的重要组成部分,其设计需要考虑功率密度、散热等多个方面的因素。
一家电力电子设备制造公司在对其新型电力模块进行设计时,采用了三维技术,在三维模型中进行了功率密度、散热等多个方面的仿真工作,从而获得了更准确和全面的分析结果。
2三维滑台实验指导书
三维滑台实验指导一、实验目的1.认识三维滑台装置,了解其工作原理2.结合《运动控制系统》课程,了解步进电机的工作原理及其控制方式3.熟悉Keil编程软件,练习C语言编程二、实验器材1.三维滑台机械装置;2. 三维滑台控制箱;3. 电脑一台4.单片机下载线1根;5.A4大小纸张若干三、实验原理1.三维滑台介绍三维滑台是一种可以在X、Y、Z三个方向运动的机械装置,其中X、Y方向可以实现纸张的平面移动,在Z方向装有铅笔。
运用此装置可以实现运动控制中的位置控制,以及可以模仿实际工程中的钢板切割、雕刻刺绣、机械加工甚至是3D打印技术。
三维滑台的X、Y、Z轴方向使用步进电机作为动力源,步进电机的最初模型是在19世纪30年代出现的。
步进电机是将电脉冲信号转变为角位移或线位移的开环控制元件。
在非超载的情况下,电机的转速、停止的位置取决于脉冲信号的频率和脉冲个数,而不受负载变化的影响,即给电机加一个脉冲信号,电机则转过一个步距角。
这一线性关系的存在,加上步进电机只有周期性的误差而无累积误差等特点。
使得在速度、位置等控制领域用步进电机来控制变的非常的简单。
图1 三维滑台2.步进电机的工作原理步进电机是将电脉冲信号转变为角位移或线位移的开环控制元步进电机件。
在非超载的情况下,电机的转速、停止的位置只取决于脉冲信号的频率和脉冲数,而不受负载变化的影响,当步进驱动器接收到一个脉冲信号,它就驱动步进电机按设定的方向转动一个固定的角度。
可以通过控制脉冲个数来控制角位移量,从而达到准确定位的目的;同时可以通过控制脉冲频率来控制电机转动的速度和加速度,从而达到调速的目的。
当电流流过定子绕组时,定子绕组产生一矢量磁场。
该磁场会带动转子旋转一角度,使得转子的一对磁场方向与定子的磁场方向一致。
当定子的矢量磁场旋转一个角度。
转子也随着该磁场转一个角度。
每输入一个电脉冲,电动机转动一个角度前进一步。
它输出的角位移与输入的脉冲数成正比、转速与脉冲频率成正比。
纳米级微动工作台的研究现状及发展趋势
基金项 目: 国家 自然科学基金项 目(0 7 186 5 5 5 ) 浙江 省自然科 学基金青年人 才项 口( 5 3 9 ) 5253 、 705 , 0 R 0 17
作者简介:雷 勇( 9 9一 ) 男 , 17 , 四川 内江人 . 硕士研究生 . 研究方 向为微运 动技术 。
综述, 对现有的 纳米级微 动工作 台的工作原理 、 性能特点和 可实现的运动 范 围及精 度进行 了分析 比较 , 此基础上 。 在 对纳米级微 动工作 台的发展趋 势做 了展 望。 关键词 : 米科技 ; 纳 磁悬浮 ;微动 工作 台 ;高精度 ;大范 围
中图分 类号 : H13 3 T 3 . 文献标识码 : A
维普资讯
第 1期
雷 勇等: 纳米级微动工作台的研究现状及发展趋势
7 3
移器 上施 加 电压时 , 由于 四连 杆受 力 而变形 , 得两个 方 向的 获 微 位移 。其优 点如 上所 述 , 可 以在单 层上 实 现 两 个 方 向的 但 微动。
最 大工作 速度 为 4 m / , 0 m :定位 精度 ± . m。 s 01
13 滑动 导轨式微动工作台 .
典 型的采用 两级 丝杆 驱 动滑 动导 轨实现 微 位移原 理 示 意
图 1 单 层 — Y弹性 微 动 上 作 台
图¨ 见图3 第一级用交流 电机驱 动的丝杆 机构可 以达 , 到 ± . T的定位精度 , 05 l l 通过二级 制动器对第 一级位置 误 差进行 补偿 , 可实现 ±lm 的定 位精度 。 n
12 滚 动导轨 式微 动二 台 . [ 作
滚动导轨也是微动工作台中一种常见 的导轨形式 , 它具 有行程大, 运动灵活 、 结构简单 、 工艺性好 、 容易实现较高的定 位精度的优点 , 2为采用滚珠导轨作 为微动工作 台的支承 图 和导 向元件, 直流伺服电机传动 、 实现了对 自动分步重复光刻 机 的微定 位控制 ¨ 。该微 动 台运 动范 围为 、 向 10 m, Y方 5m
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
其中δ12 =δ21 =δ23 =δ32 = 0 ,Δ1 P = Δ3 P = 0 。采用 图形互乘法得到广义位移和柔性系数分别为
∫ ∫ δ22 =
M2 M2 ds EI
=
πR 3 EI
,Δ2 P =
M2 M P ds = PR2
EI
4 EI
式中 E —工作台材料弹性模量 ; I —铰链截面惯性矩 ;
图 1 三维微动工作台结构 Fig. 1 St ruct ure of 32DO F micropo sitioning stage
2 纳米级微动工作台设计与分析
传统的定位系统采用电机驱动 ,经机械传动 实现精密定位 ,但由于摩擦和回程间隙的存在 ,机 械传动系统难以实现光学精密调整要求 。本文设 计的三自由度微动工作台利用压电陶瓷驱动 ,通
马 立 ,荣伟彬 ,孙立宁
(哈尔滨工业大学 机器人研究所 ,黑龙江 哈尔滨 150001)
摘要 :研究开发了一种新型精密三维微动工作台 。采用呈等边三角形分布的三个压电陶瓷和环形平板铰链机构 ,保证了 运动传递的连续性 、无洄滞 、无摩擦 、高精度 。建立了工作台的简化模型 ,并利用结构力学理论推导出工作台沿 z 方向平 动刚度 、绕 x 、y 方向转动刚度以及前三阶固有频率解析式 。进行了微动工作台沿 z 方向平动刚度 、绕 x 、y 方向转动刚度 以及固有频率试验测试 ,验证了解析方法和有限元方法进行三维工作台刚度及动力特性分析的正确性 。有限元分析表 明 :当工作台的环形平板铰链半径较小而铰链厚度较大时 ,其刚度 、频率及驱动力较高 ,其铰链根部应力集中也较严重 。 通过改变环形平板铰链的特征参数 ,可达到控制和优化工作台固有频率 、输出位移 、应力分布及驱动力响应的目的 , 并提 出了一种优选微动工作台环形平板铰链参数的简易方法 。 关 键 词 :环形平板铰链 ;纳米定位 ;有限元分析 ;刚度 ;固有频率 中图分类号 : TP242 文献标识码 :A
过环形平板铰链实现微动操作[728] 。图 1 所示 ,微 动工作台结构由运动输出平台 、环形平板铰链 、螺 纹圆锥销 、底座 、支撑台体 、钢珠 、压电陶瓷 、预紧 装置等几部分组成 。运动输出平台通过钢珠与压 电陶瓷连接 ,预紧压电陶瓷 ,使压电陶瓷 、钢珠和 运动输出平台实现无间隙连接 。底座通过螺纹圆 锥销与支撑台体连接 。运动输出平台与底座通过 环形平板铰链连接在一起 ,三者由一体加工而成 。
Abstract : A novel t hree2degree2of2f reedo m (32DO F) nanopo sitio ning stage was developed. The stage utilizes t hree piezoelect ric act uators ( PZTs) arranged in an equilateral t riangle shape and ring plate hinges to realize nanopo sitio ning for assuring smoot hness of movement , negligible f rictio n , negligible backlash and high p recisio n. The simplified mo deling of t he nanopo sitio ning stage was discussed. The t ranslatio nal stiff ness alo ng z directio n and rotatio nal stiff ness alo ng x and y directio n , and t hree nat u2 ral f requencies of t he nanopo sitio ning stage are deduced in terms of t he t heory of st ruct ural mechanics. Theoretical analysis and finite element analysis o n static and dynamic behavior of t he nanopo sitio ning stage are performed. The co mparative result s of t he t heoretical analysis , finite element analysis ( F EA) and experiment s show t he accuracy of t heory model and t he validit y of F EA . F EA al so indi2 cates t hat t he stiff ness , t he nat ural f requency and t he driving fo rce will increase wit h decreasing hinge radius and increasing hinge t hickness despite t he maximum st ress increasing of t he stage. By mo difi2 cating t he dimensio ns of a ring plane hinge it can co nt rol and optimize nat ural f requency , displace2 ment , st resses , and driving force to achieve t he desired respo nse of t he nanopo sitio ning system. Final2 ly ,t his paper gives a simple p rocedure to select t he p roper dimensio ns of a nanopo sitio ning stage. Key words : ring plate hinge ; nanopo sitio ning ; F EA ; stiff ness ; nat ural f requency
第 14 卷 第 6 期 2006 年 12 月
Op
tics
光学 精密工程
and Precision Engineering
Vol. 14 No. 6
Dec. 2006
文章编号 10042924X(2006) 0621017208
三维纳米级微动工作台的设计与分析
(a) 受力分析 (a) Force analysis
(b) 静定结构 (b) Determinate st ruct ure 图 3 环形平板铰链简化模型 Fig. 3 Simplified model of ring plate hinges
微动台沿着 z 轴平动时 , 取环形平板铰链 A B C 进行受力分析 , 如图 3 ( a) 所示 , 环形平板 A B C 为具有 12 个支反力的 6 次超静定问题 。利 用对称原理 , 可简化为 3 次超静定问题 , 断开 B 端约束 ,得到基本静定体系如图 3 ( b) 所示 , 在基 本静定体系上分别作用驱动力 P/ 2 、广义未知力 X1 、X2 和 X3 ,方向如图 3 ( b) 所示 , 列出力法方程 为
图 2 环形平板铰链模型 Fig. 2 Model of ring plate hinges
第6期
马 立 ,等 :三维纳米级微动工作台的设计与分析
1019
2. 1 微动工作台的静力分析 微动工作台环形平板铰链机构模型如图 2 所
示 ,工作台运动输出部分厚度较大 ,可将运动输出 平台视为刚体 。运动输出平台的刚体运动可分解 为沿 z 向平动位移 ( uz ) 以及绕 x 、y 轴的转动角位 移 (θx 和θy ) 。由于微动台采用呈等边三角形分 布的压电陶瓷和环形平板铰链机构 , 其环形平板 铰链静力分析可简化为如图 3 所示 。
微动台采用呈等边三角形分布的三个压电陶 瓷 (图 1) 和环形平板铰链机构 (图 2) ,保证了运动 传递的连续性 、无洄滞 、无摩擦 、高精度 。调整三 个压电陶瓷的驱动电压 , 可实现环形平板铰链沿 z 向平动位移 ( uz ) 以及绕 x 、y 轴的转动角位移 (θx 和θy ) 。通过压电陶瓷内部集成应变片式传 感器 ,控制者可利用控制系统实现微动台三向位 移输出 。工作台系统采用的压电陶瓷驱动电源位 移分辨率为 5 nm ,位移传感器闭环检测电路精度 为 2 nm ,可实现微定位位移分辨率为 5 nm ,角度 分辨率为 0. 1″。
δ11 X1 +δ12 X2 +δ13 X3 +Δ1 P = 0 δ21 X1 +δ22 X2 +δ23 X3 +Δ2 P = 0 , (1) δ31 X1 +δ32 X2 +δ33 X3 +Δ3 P = 0 式中δij —广义柔性系数 (表示基本静定体系在 X j 方向上的广义单位力单独作用时 , B 点沿 X i 方向 上的广义位移) ; ΔiP —基本静定体系在荷载 P 单独作用时 , B 点沿 X i 方向上的广义位移 。
Design and analysis of a novel 32DOF nanopositioning stage
MA Li , RON G Wei2bin , SU N Li2ning
( R obotics I nsti t ute , H arbi n I nsti t ute of Technolog y , H arbi n 150001 , Chi na)
在一些光学精密调整中 ,经常需要将物体偏 转一个角度 ,以达到各种调整需求 。目前 ,一般是 通过螺纹或顶丝调整支架机构来实现偏转角度的 目的 ,其分辨率最高只能达到 0. 1°。但是当偏转 角度较小 ,角度分辨率要求较高时 ,通过现有调整 手段往往不能达到所需调整角度 。