机器人手指用无刷直流电动机驱动系统设计
无刷直流电动机及驱动系统设计
无刷直流电动机及驱动系统设计无刷直流电动机是一种能够将电能转化为机械能的电机,它不仅具有高效率、高功率密度、大扭矩和高转速等优点,同时还能在宽范围内调整转速和控制扭矩。
因此,无刷直流电动机及其驱动系统设计成为了工业应用和个人消费电子产品中常见的一种电机类型。
无刷直流电动机驱动系统由电机本体、功率器件、传感器、微控制器和控制算法等组成。
首先,电机本体是电机的核心部分,包括转子、定子、磁铁和绕组等。
转子是电机的运动部分,由永磁体和轴承支撑。
定子是电机的静止部分,由铁芯和绕组组成。
磁铁是电机的永磁体,产生磁场以与永磁体上的磁场相互作用。
绕组是由导线绕制的线圈,通过流过电流产生磁场。
其次,功率器件是驱动系统的关键部分,用于将电能从电源转化为机械能。
一般采用MOSFET或IGBT等功率器件,以实现高速开关和较高电流能力。
它们能够承受高电压和大电流,并快速切换,使得电机能够根据控制信号调整转速和扭矩。
传感器是驱动系统中用于检测电机位置和转速的重要组成部分。
常见的传感器有霍尔传感器、反电动势传感器和编码器等。
霍尔传感器通过检测磁场强度变化来确定转子的位置,反电动势传感器通过测量绕组中电流变化产生的反电动势来确定电机的转速,编码器则能够提供更准确的位置和速度信息。
微控制器是驱动系统中负责控制电机运行的核心部件。
它包含了控制算法、控制逻辑和通信接口等功能,通过与传感器和功率器件进行交互来实现对电机转速、扭矩和方向的精确控制。
微控制器能够根据输入的控制信号,通过调节电流和电压来控制电机的运行状态。
最后,控制算法是驱动系统的重要组成部分,在实际应用中起到至关重要的作用。
常见的控制算法包括PID控制、电流环控制、速度环控制和位置环控制等。
PID控制通过调整比例、积分和微分控制器的系数来达到稳定控制的效果。
电流环控制通过直接或间接测量电机电流,以控制电机的转矩和速度。
速度环控制通过测量电机转速,并根据所需转速和实际转速之间的差异来调整控制信号。
基于移动机器人直流电机驱动电路的设计与应用

( ol eo uo ai c nea dE gne n , o t C ia U i r t o C lg A tm t nS i c n n i r g S uh hn nv syf e f o e ei ei Tc nl y u n zo 1 6 1 hn ) eh o g ,G a gh u5 0 4 ,C ia o
第4 4卷 第 1 期 1 2 1 年 1 月 01 1
Vo . 144. No 1 .1 NO . 011 V2
基 于 移 动 机 器 人 直 流 电 机 驱 动 电路 的 设 计 与 应 用
余晓填 ,杨 曦 ,陈
摘
安 ,解
辉 ,黄 泽毅
5 04 ) 16 1
( 华南理 工大学 自动化科Байду номын сангаас与工程学 院 ,广 州
关键词 :移动机器人 ;直流 电机驱动 ;光耦 隔离 ;H桥 ;N沟道增强型场效应管
中图分类号 :T 8 ;T 22 M3 1 P 4 文献标志码 :A 文章编 号 :10 —8 8 2 1 ) 10 3 -4 0 16 4 (0 1 1 -0 70
De i n a d I p e e t t n o sg n .m lm n a i fDC o o i e s d o o i b t o M t r Drv r Ba e n M b l Ro o e
课 题组移 动 机 器人 采 用 的是 四轮 左 右 两 组 电机 独立 驱 动 。直流 电机 驱 动控 制 电路 方 案 整 体 结 构设 计 如 图 1所 示 。 驱 动 控 制 电 路 由 光 耦 隔 离 电 路 、 N S控制 器 、D / C定 电压 隔 离转 换 器 、消 除反 MO CD 电势 电路 以及 H桥功 率驱 动 电路 五大 部分 构成 。
基于单片机的机械手关节直流电机控制电路

课程名称专业综合课程设计院(系)专业班级课程设计题目基于单片机的机械手关节直流电机控制电路课程设计时间:课程设计的内容及要求:利用单片机、电路板开发基于单片机的机械手关节直流电机控制电路,实现机械手关节直流电机控制电路,使直流电机对一个机械手壁关节的启、停、正转、反转控制。
具体要求如下:(1)按以上要求制定设计方案,并绘制出系统工作框图及程序流程图;(2)按要求设计单片机的外围电路,给出电路原理图;(3)编写主要程序;(4)用protus进行仿真,给出仿真电路图;(5)单片机仿真器、电路板、电源等硬件正确可靠地连接;(6)按键控制直流电机进行正反转,使机械手关节活动;指导教师年月日负责教师年月日学生签字年月日目录0前言 (1)1总体设计方案 (1)2.硬件电路设计 (2)2.1单片机系统 (2)2. 2独立按键 (3)2.3 电机驱动 (4)3.软件设计 (6)3.1 按键子程序设计 (8)3.2调速子程序设计 (9)4调试分析 (10)5.结论及进一步设想 (11)参考文献 (11)课设体会 (12)附录1 电路原理图 (13)附录2 元件清单 (14)附录3 程序清单 (15)基于单片机的机械手关节直流电机控制电路摘要:本文设计了由单片机控制的机械手关节直流电机,由单片机、电机驱动芯片、机械手直流电机、控制电机的(正转、反转、启停、调速)键盘组成,主要使用了AT89C52、L298、直流电机主要器件,主要解决方案是利用单片机最小系统设计一个由按键控制的直流电机的在转动来控制机械手关节的运动。
关键字:单片机;直流电机;控制电路。
0前言着我们工业自动化水平的不断提高,在机械加工和机械制造领域,以及各种装配与包装自动化生长线上,机械手的应用以相当普遍。
机械手通常担任着上料,下料等加工任务。
由于PLC顺序控制具有系统简单,可靠,控制灵活方便等特点,而且从PLC诞生之日起,其最基本,最普遍的应用领域就是在工业环境下的顺序控制。
直流无刷电机的控制系统设计方案
直流无刷电机的控制系统设计方案1 引言1.1 题目综述直流无刷电机是在有刷直流电机的基础上发展起来的,它不仅保留了有刷直流电机良好的调试性能,而且还克服了有刷直流电机机械换相带来的火花、噪声、无线电干扰、寿命短及制造成本高和维修困难等等的缺点。
与其它种类的电机相比它具有鲜明的特征:低噪声、体积小、散热性能好、调试性能好、控制灵活、高效率、长寿命等一系列优点。
基于这么多的优点无刷直流电机有了广泛的应用。
比如电动汽车的核心驱动部件、电动车门、汽车空调、雨刮刷、安全气囊;家用电器中的DVD、VCD、空调和冰箱的压缩机、洗衣机;办公领域的传真机、复印机、碎纸机等;工业领域的纺织机械、医疗、印刷机和数控机床等行业;水下机器人等等诸多应用[1]。
1.2 国内外研究状况目前,国内无刷直流电机的控制技术已经比较成熟,我国已经制定了GJB1863无刷直流电机通用规范。
外国的一些技术和中国的一些技术大体相当,美国和日本的相对比较先进。
当新型功率半导体器件:GTR、MOSFET、IGBT等的出现,以及钕铁硼、钐鈷等高性能永磁材料的出现,都为直流电机的应用奠定了坚实的基础。
近些年来,计算机和控制技术快速发展。
单片机、DSP、FPGA、CPLD等控制器被应用到了直流电机控制系统中,一些先进控制技术也同时被应用了到无刷直流电机控制系统中,这些发展都为直流电机的发展奠定了坚实的基础。
经过这么多年的发展,我国对无刷电机的控制已经有了很大的提高,但是与国外的技术相比还是相差很远,需要继续努力。
所以对无刷直流电机控制系统的研究学习仍是国内的重要研究内容[2]。
1.3 课题设计的主要内容本文以永磁方波无刷直流电机为控制对象,主要学习了电机的位置检测技术、电机的启动方法、调速控制策略等。
选定合适的方案,设计硬件电路并编写程序调试,最终设计了一套无位置传感器的无刷直流电机调速系统。
本课题涉及的技术概括如下:(1)学习直流无刷电机的基本结构、工作原理、数学模型等是学习电机的前提和首要内容。
巡检机器人无刷直流电机伺服系统的设计
电气传 动 2 1 0 1年 第 4 l卷 第 1期
ELE CTRI C DRI 2 1 Vo. 1 No 1 VE 0 1 14 .
巡 检 机 器 人 无 刷 直 流 电机 伺 服 系 统 的设 计
王 晓 峰 , 毅 , 正 阮 李 ( 海 大 学 机 电 工 程 与 自动 化 学 院 , 海 2 0 7 ) 上 上 0 0 2
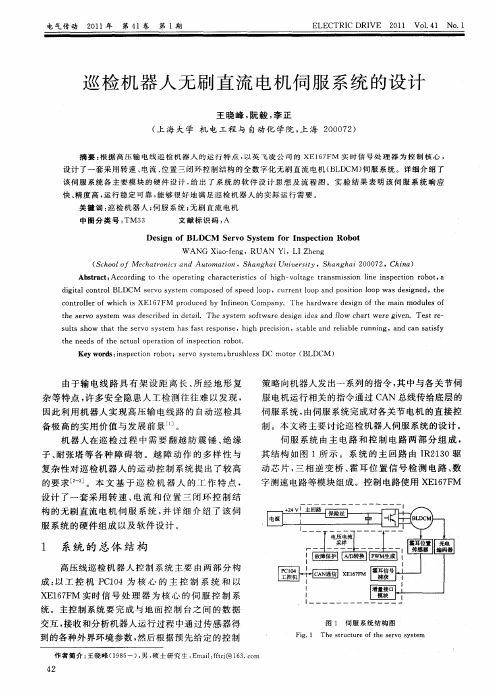
伺服 系统 由主 电路 和控 制 电路 两 部 分组 成 ,
其结 构如 图 1 示 。系 统 的 主 回路 由 I 2 3 所 R 1 0驱 动 芯片 , 三相 逆 变桥 、 耳位 置信 号检 测 电路 、 霍 数 字测速 电路等模块组成 。控制 电路使用 X 1 7 M E 6F
复杂性 对巡检机 器人 的运动控制 系统提 出了较高
( c o l f eh to isa d Auo to S h o M c a rn c n tma in,S a g a iest o h n h iUnv riy,S a g a 0 0 2,C ia h n h i2 0 7 hn )
Ab ta t A c or i g t t pe a i h r ce itc f hi s r c : c d n o he o r tng c a a t rs is o gh— o t g ta m ison l n r ot a dgia on r lBLDCM e v y tm om p e fs e d lop,c r n o n ston l p w a e i e i t lc t o sr os se c os d o p e o ur e tlop a d po ii oo sd sgn d,t he c t o lro on r le fwhih i c s XE1 7FM r d e y I i on Co pa y. The h r wa ede i n o h an mod e 6 p o uc d b nfne m n a d r sg ft e m i ulsof t e s r o s s e wa s rb d i e al Thes s e s t r e in i a a d fo c r r v n T e tr — h e v y t m sde c ie n d t i. y t m ofwa e d sg de n lw ha twe e gie . s e s hs s w h tt e vo s t m a a tr s o e,hi e iin,sab ea d r la e r ni u ho t a he s r yse h sf s e p ns gh pr cso t l n eibl un ng,a a a if nd c n s tsy
无刷直流电机控制系统的设计——毕业设计
无刷直流电机控制系统的设计——毕业设计学号:1008421057本科毕业论文(设计)(2014届)直流无刷电机控制系统的设计院系电子信息工程学院专业电子信息工程姓名胡杰指导教师陆俊峰陈兵兵高工助教2014年4月摘要无刷直流电机的基础是有刷直流电机,无刷直流电机是在其基础上发展起来的。
现在无刷直流电机在各种传动应用中虽然还不是主导地位,但是无刷直流电机已经受到了很大的关注。
自上世纪以来,人们的生活水平在不断地提高,人们在办公、工业、生产、电器等领域设备中越来越趋于小型化、智能化、高效率化,而作为所有领域的执行设备电机也在不断地发展,人们对电机的要求也在不断地改变。
现阶段的电机的要求是高效率、高速度、高精度等,由此无刷直流电机的应用也在随着人们的要求的转变而不断地迅速的增长。
本系统的设计主要是通过一个控制系统来驱动无刷直流电机,主要以DSPIC30F2010芯片作为主控芯片,通过控制电路采集电机反馈的霍尔信号和比较电平然后通过编程的方式来控制直流无刷电机的速度和启动停止。
关键词:控制系统;DSPIC30F2010芯片;无刷直流电机AbstractBrushless dc motor is the basis of brushless dc motor, brushless dc motor is developed on the basis of its. Now in all kinds of brushless dc motor drive applications while it is not the dominant position, but the brushless dc motor has been a great deal of attention.Since the last century, constantly improve the people's standard of living, people in the office, industrial, manufacturing, electrical appliances and other fields increasingly tend to be miniaturization, intelligence, high efficiency, and as all equipment in the field of motor is in constant development, people on the requirements of the motor is in constant change. At this stage of the requirements of the motor is high efficiency, high speed, high precision and so on, so is the application of brushless dc motor as the change of people's requirements and continuously rapid growth.The design of this system mainly through a control system to drive the brushless dc motor, mainly dspic30f2010 chips as the main control chip, through collecting motor feedback control circuit of hall signal and compare and then programmatically to control the speed of brushless motor and started to stop.Keywords: Control system; dspic30f2010 chip; brushless DC motor目录摘要 (I)Abstract (III)目录 (IV)1 引言 01.1 研究背景及意义 01.2 国内外研究现状 (1)1.3 设计任务与要求 (1)2 基本理论 (1)2.1 无刷直流电机的结构以及基本原理 (1)2.2 无刷直流电机的运行特性 (4)2.3 无刷直流电机的应用 (5)3 直流无刷直流电机控制系统的设计 (6)3.1 无刷直流电动机系统的组成部分 (6)3.2 无刷直流电机控制系统的设计 (8)4 直流无刷电机的电路设计 (9)4.1 开关电路的设计 (9)4.2 保护电路的设计 (9)4.3 驱动电路的设计 (10)4.4 反馈电路的设计 (10)4.5 电源电路的设计 (11)5 直流无刷电机控制系统的软件设计 (11)5.1 系统功能的实现 (12)5.2 软件流程图 (12)6 实物成果及展望 (13)致谢 (16)参考文献 (16)附录 (19)1 引言近年来随着微电子技术自动控制技术和新型永磁材料的发展,无刷直流电机的应用越来越广泛。
基于直流无刷电机的无线遥控机械手臂设计
关键词 :Mx¥128飞 思卡 尔单 片机 ;CAD设计 ;SI9979驱动 ;无线遥控
中图分类号 :TP241
文献标识码 :A
文章编 号:1674—7712(2014)16—0040—01
随着机 械手臂概念 的广泛流行 ,机械人和机 械手臂 的研 制也 已然成 为当下高新 技术和科 学邻域迅速发 展起来 的一门 新兴技术 。机械手臂可通过对单片机的编程加以控制来完成各 种预 期的作业任 务,在构造和 性能上兼 有人和机器 各 自的优 点。在现代生产过程中,机械臂被广泛 的运用于 自动化生产线 中。本文 简要介绍基于直流无刷 电机的机械手臂设计,并通过 LabVIEW软件设计 的无线控制 平台实现对三 台直流无刷 电机 的 位 置 伺服 和 角 度 控 制 ,从 而 实现 整 体 机 械 手 臂 的无 线 遥 控 功 能 。
(三 )直流无 刷 电机选 型 。无刷直 流 电动机 是在有刷直 流 电动机 的基础上 发展起来 的。 由于有刷 直流 电动机 无法解 决机械换 向的问题 ,使得控制 系统整体 的可靠性 降低,导致 其使用 受到 限制 。无刷直流 电机 去除 了机 械接触 电刷 ,很好 地解 决机 械换 向产 生的 问题 。 电机本体 的 电枢绕组 为三相 的 星型连接 绕组 ,电机 的位置霍 尔传感器 与 电机转 子同轴 ,控
表 2 电机型号选择
电机型号 额 定扭矩 功率 额定 电压 额 定转速
60BL1 00-230 0,5Nm 150w 24v
3000rpm
57BL70—225
0.4Nm 100w
57BL75s10—230 0.32Nm 100w
24v 24v
2500rpm 3000rpm
直流无刷电机的控制系统设计方案
直流无刷电机的控制系统设计方案直流无刷电机(BLDC)是一种能够提供高效可靠的电动机驱动方案的电机。
它具有高效率、高功率密度、长寿命和低噪音等特点,广泛应用于工业、汽车和消费电子等领域。
在这篇文章中,我们将探讨直流无刷电机控制系统的设计方案。
一、控制器选择选择合适的控制器对于直流无刷电机的性能至关重要。
常见的控制器包括传感器基本反馈控制器和无位置传感器矢量反馈控制器。
1.传感器基本反馈控制器:传感器基本反馈控制器通过对电机速度和位置的测量反馈来控制电机。
它具有简单的硬件结构和易于实现的特点,适用于对控制精度要求不高和成本要求较低的应用。
2.无位置传感器矢量反馈控制器:无位置传感器矢量反馈控制器通过使用电流、电压和速度等参数来估计电机的位置和速度,从而进行闭环控制。
它能够提供更高的控制精度和动态性能,适用于对控制精度要求较高的应用。
二、传感器选择1.霍尔传感器:霍尔传感器通过检测电机转子上的永磁体磁场变化来确定电机的位置。
它具有结构简单、成本低和使用方便等优点,适合于低成本和低精度的应用。
2.编码器:编码器通过检测电机转子的机械运动,如转子的转速和位置来确定电机的位置。
它具有较高的精度和抗干扰能力,适用于对控制精度要求较高的应用。
3.霍尔传感器与编码器混合使用:为了兼顾成本和精度要求,可以采用霍尔传感器与编码器混合使用的方式进行控制。
霍尔传感器用于测量电机的粗位置信息,编码器用于提供更精确的位置和速度信息。
三、控制策略选择1.电流控制:电流控制是直接控制电机的电流大小和方向,从而控制电机的转矩。
它具有快速响应和较高的控制精度等优点,适用于对控制精度要求较高的应用。
2.速度控制:速度控制是通过控制电机输入电压或电流的大小来控制电机的转速。
它具有稳定性好、抗负载扰动能力强等优点,适用于需要稳定转速的应用。
3.位置控制:位置控制是通过控制电机输入电压或电流的大小来控制电机的位置。
它具有控制精度高、抗负载扰动能力强等优点,适用于需要精确定位的应用。
无刷直流电机控制系统设计
无刷直流电机控制系统设计无刷直流电机控制系统设计一、引言近年来,无刷直流电机由于其高效、低噪音和长寿命等特点,被广泛运用在各种领域,如电动汽车、无人机、工业机器人等。
无刷直流电机的控制系统是整个系统的核心,其设计的优劣直接影响到系统的性能和稳定性。
因此,对无刷直流电机控制系统的研究具有重要意义。
二、无刷直流电机基本原理无刷直流电机是一种将交流电转换成直流电的电机,其工作原理和普通直流电机基本相同。
传统的直流电机是通过换向器将直流电源提供的直流电转换成交流电,再通过电刷与换向器进行配合,使得电机能够正常转动。
然而,无刷直流电机通过内部的传感器,能够实时检测转子位置,在合适的时机切换相序,从而实现电机的转动。
其与直流电机相比,具有结构简单、寿命长、噪音低等特点。
三、无刷直流电机控制系统的组成无刷直流电机控制系统主要由传感器、电机驱动器和控制算法三部分组成。
1. 传感器传感器主要用于检测转子位置和转速等信息,常见的传感器有霍尔传感器、编码器等。
通过传感器获得的信息可以提供给控制系统,以便实时控制电机的工作状态。
2. 电机驱动器电机驱动器作为控制系统的核心部件,主要用于控制电机的转速和方向。
电机驱动器通常由功率放大器和控制电路组成,通过接收控制信号,控制电机的运行。
3. 控制算法控制算法是无刷直流电机控制系统的关键,常见的控制算法有电流反馈控制、速度反馈控制和位置反馈控制等。
通过对传感器获得的信息进行处理和分析,控制算法能够准确地控制电机的运行状态,实现所需的功能。
四、无刷直流电机控制系统设计无刷直流电机控制系统的设计需要考虑多个方面的因素,如控制精度、稳定性、响应速度等。
1. 选择合适的传感器传感器的选择直接影响到控制系统的精度和稳定性。
根据实际需求,选择适用的传感器,并进行合理的安装和校准。
2. 电机驱动器的设计电机驱动器需要根据电机的功率和转速等参数进行选择和设计。
选用合适的功率放大器和控制电路,确保电机能够正常工作,并满足系统的要求。
基于单片机的机械手关节直流电机控制电路
课程设计(论文)题目基于单片机的机械手关节直流电机控制电路班级学号学生姓名沈阳航空航天大学课程设计任务书课程名称专业综合课程设计院(系)专业班级课程设计题目基于单片机的机械手关节直流电机控制电路课程设计时间:课程设计的内容及要求:利用单片机、电路板开发基于单片机的机械手关节直流电机控制电路,实现机械手关节直流电机控制电路,使直流电机对一个机械手壁关节的启、停、正转、反转控制。
具体要求如下:(1)按以上要求制定设计方案,并绘制出系统工作框图及程序流程图;(2)按要求设计单片机的外围电路,给出电路原理图;(3)编写主要程序;(4)用protus进行仿真,给出仿真电路图;(5)单片机仿真器、电路板、电源等硬件正确可靠地连接;(6)按键控制直流电机进行正反转,使机械手关节活动;指导教师年月日负责教师年月日学生签字年月日目录0前言 (1)1总体设计方案 (1)2.硬件电路设计 (2)2.1单片机系统 (2)2. 2独立按键 (3)2.3 电机驱动 (4)3.软件设计 (6)3.1 按键子程序设计 (8)3.2调速子程序设计 (9)4调试分析 (10)5.结论及进一步设想 (11)参考文献 (11)课设体会 (12)附录1 电路原理图 (13)附录2 元件清单 (14)附录3 程序清单 (15)基于单片机的机械手关节直流电机控制电路摘要:本文设计了由单片机控制的机械手关节直流电机,由单片机、电机驱动芯片、机械手直流电机、控制电机的(正转、反转、启停、调速)键盘组成,主要使用了AT89C52、L298、直流电机主要器件,主要解决方案是利用单片机最小系统设计一个由按键控制的直流电机的在转动来控制机械手关节的运动。
关键字:单片机;直流电机;控制电路。
0前言着我们工业自动化水平的不断提高,在机械加工和机械制造领域,以及各种装配与包装自动化生长线上,机械手的应用以相当普遍。
机械手通常担任着上料,下料等加工任务。
由于PLC顺序控制具有系统简单,可靠,控制灵活方便等特点,而且从PLC诞生之日起,其最基本,最普遍的应用领域就是在工业环境下的顺序控制。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
机器人手指用无刷直流电动机驱动系统设计@ 汪为庆@ 金明河
输出一个高电平,进入 !"#$。在 !"#$ 中根据这 个电平的变化,进行相应的电流保护措施 ( 切断三 相全桥驱动电路) 。 %$&’()( 芯片的特点有:工作电流低、典型 值为 *+ !$;工作电压范围宽,从 ,- ) . 到 ,/ .; 控制的阈值电流精度高,典型值为 +- 001 ;电流 检测放大器有 ( 种固定增益 ( 2 ,+ 、 2 *+ 、 2 3++ , 分别用型号后缀 4、!、5 表示) ,无需外接设定增 益电阻;有极宽的共模电压范围,从 + . 6 ,/ .; 工作温度范围 7 ’+8 6 /*8 ;/ 引脚 !%$& 或 9: 封装。该器件内部由电流检测放大器、输出锁存 型电压比较器及基准电压源等组成,具有高度集 成的特点,并且满足电流检测的性能要求。 !" #$ 保护电路 当系统刚上电时, !"#$ 的输出引脚为状态不 定,有可能导致三相全桥电路的上下桥臂的直通 而烧毁电路。为防止意外发生,应该首先切断驱 动电路总回路的电流。这是通过一个功率开关管 !;<0((+= 来实 现 的。正 常 情 况 下, !;<0((+= 的 :> ? :!! 引脚通过一个下拉电阻接地,使功率开关
万方数据
图 3" 电流检测电路
!" !$ 电流检测 为了防 止 通 过 电 机 的 电 流 太 大 而 发 生 意 外, 系统中增加了驱动电路的电流检测环节。基关节 的电流检测采用 A4K3=@= 芯片,将采集到的电压 ( 经过一个电阻) 放大 #< 倍,然 后 与 内 部 自 带 的 <L ? M 的参考电压进行比较,如果比 <L ? M 高,则
图 0@ !"#$ 驱动电路信号处理电路仿真图
#$ 软件开发
在系统的软件设计过程中,灵巧手手指单个关 节的无刷直流电机伺服系统采用角度、角速度双环 从属控制结构。电机的换相、转速和加速度以及电 机输出转矩是伺服系统设计必须考虑的因素。电机 的旋转输出与手指关节的运动存在一个固定的关系, 这个关系由灵巧手机械系统的结构决定。位置传感 器获得旋转关节位置作为控制系统的位置反馈。在 灵巧手抓握某个物体或者手指与外界环境接触时, 系统利用关节转矩传感器反馈信号以实现精确的转 矩控制。霍尔传感器的输出信号除了实现电机换向 逻辑转换外,另外一个重要的功能是计算电机转子 — *( —
万方数据
微电机" #<<@ 年" 第 3< 卷" 第 = 期( 总第 !HJ 期)
9&:4 发出控制信号,使电机电流关断。 !" #$ 三相全桥驱动电路模块 本文采用 ;)#< 型无刷直流电机作为手指的驱 动元件。电机内部集成了霍尔位置传感器,具有 = 路数字霍尔信号输出。 9&:4 根据这些霍尔信号产 生基本的电机换向逻辑,实现无刷电机的无接触 换向。驱动电路采用 9>)?=#@) 芯片的 AB’9;C 组 成三相逆变桥,来控制电机三相电流的通断。 9&D :4 发出的指令信号 A&4E &、A&4E 5、A&FE &、 A&FE 5、A&)E &、A&)E 5 控制电机三相电流的 通断,采用两两通电方式, &GA 信号加载于上半 桥,即 A&4E &、A&FE &、A&)E & 信号中包含了 占空比信息,通过调节占空比信息,即可进行电 [ H] 机的调压调速 。 图 = 是无刷直流电机三相全桥驱动电路。 C# 、 C= 、CH 、C? 、CI 、CJ 是 5 沟道的 1*78(-, C! 、 C3 和 C@ 是 & 沟道的 1*78(-。当 A&4E & 信号为高电 平时,C= 管导通,再通过 !! 和 !# 的分压使 & 沟 道的 C! 管导通;此时如果 A&FE 5 为高电平,则 CH 管导通,这样,电流经过 C! 管、电机、 CH 管 构成闭合回路。
万方数据
微电机< ,;;* 年< 第 6; 卷< 第 - 期( 总第 :4+ 期)
的位置及速度。由于霍尔传感器本身具有较高的分 辨率,而关节位置传感器的位置信号输出具有相对 较大的噪声,因此驱动器控制采用霍尔信号折算得 到的关节速度作为控制系统的速度反馈。!"#$ 根 据这些信号,对电机进行闭环控制。传感器模拟输 出信号通过串行 $% 转换成串行数字信号,串行 $% 通过 &"’ 总线与 !"#$ 实现通信。!"#$ 对这些信号 进行处理产生 "()、方向和刹车控制信号,然后产 生驱动控制信号的输出给三相全桥驱动电路,实现 对无刷直流电机的驱动和灵巧手关节的转矩和位置 闭环控制。 在本系统中,程序的任务是在规定的控制周期 内,通过 &"’ 模块控制 $%*+,* 芯片的同步采样, 将电机霍尔传感器、关节位置传感器、转矩传感 器的数字量以及指节模块的传感器数字量送至中 央处理器 -, 位 ."/,."/ 将各传感器信号进行预 处理后,得到实时的电机速度、关节位置、关节 转矩等状态参数;通过 ""&0.1 通信模块得到上位 机发出的控制任务及控制参数,如期望关节位置、 期望关节转矩等;这些控制参数一部分通过 .$2 通信模块传送给指节模块,另一部分 由 ."/ 实现
图 !" 灵巧手系统的电气及通信结构
图 #" 基关节驱动电路框图
图 =" 三相全桥电路
$) 传感器信号的采集。包括基关节位置传感 器、电机模拟霍尔传感器信号的采集; %) 数 据 通 讯。与 上 一 级 ( 手 掌) 的通讯采用 &&’()* ( &*+,- -* &*+,- ’(.+/0 )*112,+%/-+*, ) 通信模 块,将所 有 传 感 器 信 息 打 包 上 传, 接 收 控 制 信 [ 3] ;与指节模块的通讯采用 )45 总线; 号 6) 电机驱动。根据上一级 ( 手掌) 的指令需要 产生电机控制信号来驱动 1*78(-,进而控制电机的 运行; () 控制两路电机主回路电流的通断。当上电 复位时,需要让电机不通电,这时 9&:4 控制功率 开关管控制流向电机的主回路电流的通断; 8) 电机电流反馈的保护。当电机电流过大时, — H# —
?@ 灵巧手手指电气系统概述
图 & 是灵巧手手指系统的电气及通信结构。灵 巧手手指共有 # 个自由度,分别由 # 个电机控制。 在其机械 结 构 中,基 关 节 部 分 装 配 有 两 个 电 机, 实现俯仰 和 侧 摆 运 动;指 节 部 分 装 配 一 个 电 机, 控制指节的屈伸运动
[ &]
[ #] 要途径 。传统三相无刷直流电机的驱动电路具
。
基于模块化设计,整个灵巧手手指驱动系统 分为:基关节部分和指节部分。基关节模块采用 012( 芯片 T1-I+E-/$;. 驱动两个电机,同时负责 基关节位置传感器信号的采集与传输。指节模块 采用 WZ1;I#)0,)&& 芯片驱动一个电机,同时负责 指节位置传感器、基关节力矩传感器、指节力矩 传感器、指 尖 $ 维 力 Y 力 矩 传 感 器 信 号 的 采 集 与 传输。 在通信方面,基关节模块在灵巧手手指系统 ’ ’
收稿日期:-))$*),*&X
有很大的体积,并且驱动电路复杂,而如果直接 利用 012( 内部丰富的硬件资源实现传统驱动芯片 的功能,驱动三相桥电路,可以简化驱动电路并 最大限度地减小电路尺寸。基关节模块驱动电路 框图如图 - 所示。基关节模块的 012( 将实现以下 功能。 >) 电机数字霍尔信号采集。对两个电机的 $ 路 数字霍尔信号采集; — /& —
。为了达到精确地抓取操
作,必须实现位置反馈和力反馈,因此手指的每 个关节还增加了位置传感器和力矩传感器。此外, 指尖处的 $ 维力 Y 力矩传感器可以检测到灵巧手与 外部环境的接触力,进而为灵巧手的力控制提供 力感信息
[ -]
A@ 驱动电路硬件设计
机器人多指仿人灵巧手狭小的机械整体空间 给驱动电路设计人员提出了严格的尺寸要求。通 过手指的结构优化设计和减小驱动电路的体积是 提高机器人手的灵巧性能和结构紧凑性的两个重
管处于关断状态。当电机正常运行时,可以通过 !"#$ 编程,向 !;<0((+= 发出指令,打开总回路 电流。其电路图如图 * 所示。
图 *@ 保护电路图
!;<0((+= 内部集成有一个 > 沟道小功率 %ABCDE 和一个 " 沟道大功率 %ABCDE。> 型 %ABCDE 的输出用 来驱动 " 型 %ABCDE,从而实现弱电控制强电的功能。 !" %$ 驱动电路硬件编程 !"#$ 实现的驱动芯片的功能主要是:为无刷 电机控制提供诸如控制信号输入、产生换向逻辑、 门驱动输出和保护电路等一些功能。所有输入控 制信号,如 "F%、方向和刹车信号,是由上层控 制器 ( 手掌) 发给手指的 !"#$ 的。无刷电机霍尔 位置传感器提供的霍尔信号通过 !"#$ 的内部逻辑 电路产生 换 向 逻 辑,从 而 实 现 电 机 无 接 触 换 向。 换向逻辑和输入控制信号通过内部综合产生的 0 路 高、低端门驱动信号,从而控制电机。 !"#$ 的外 围保护电路提供限流和短路保护。
机器人手指用无刷直流电动机驱动系统设计’ 汪为庆’ 金明河
中图分类号:!"#$ % &’ ’ ’ ’ ’ ’ 文献标识码:(’ ’ ’ ’ ’ ’ 文章编号:&))&*$+,+ ( -)). ) )#*))/&*),