计算机控制系统第二章2PPT课件
第二章 计算机控制系统的组成
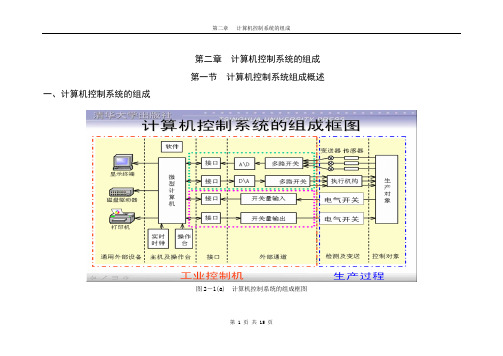
第二章 计算机控制系统的组成第 1 页 共 15 页第二章 计算机控制系统的组成 第一节 计算机控制系统组成概述一、计算机控制系统的组成图2-1(a) 计算机控制系统的组成框图如图2-1(a)所示,计算机控制系统主要由工业控制机和生产过程两大部分组成。
工业控制机是指按生产过程控制的特点和要求而设计的计算机,它包括硬件和软件两部分;生产过程包括被控对象、测量变送、执行机构、电气开关等装置,这些装置有各种类型的标准产品,在设计计算机控制系统时根据需要进行合理选型。
二、工业控制机工业控制机是指按生产过程控制的特点和要求而设计的计算机,它包括硬件和软件两部分。
1、工业控制机的硬件组成图2-1(b)工业控制机的硬件组成原理图工业控制机的硬件包括主机板、内部总线和外部总线、人机接口、磁盘系统、通信接口、输入输出通道。
(1)主机板:CPU、RAM、ROM等。
作用:进行数值计算、逻辑判断、数据处理。
(2)内部总线和外部总线内部总线:工业控制机内部各组成部分进行信息传送的公共通道,它是一组信号线的集合。
常用内部总线有IBM PC、PCI总线和STD总线。
外部总线:工业控制机与其它计算机和智能设备进行信息传递的公共通道。
RS—232C、USB和IEEE—488通信总线。
(3)人—机接口:键盘、显示器、打印机。
(4)磁盘系统:软盘和硬盘。
(5)通信接口: 工业控制机和其它计算机或智能外设通信的接口。
常用RS—232C、USB和IEEE—488接口。
(6)系统支持功能①监控定时器(看门狗-Watchdog) ②电源掉电检测③保护重要数据的后备存贮器体 ④实时日历时钟(7) 输入输出通道工业控制机和生产过程之间设置的信号传递和变换的连接通道。
它包括模拟量输入(AI)通道、模拟量输出(AO)通道、数字量(或开关量)输入(DI)通道、数字量(或开关量)输出(DO)通道。
它的作用有两个:其一、是将生产过程的信号变换成主机能够接受和识别的代码;其二、是将主机输出的控制命令和数据,经变换后作为执行机构或电气开关的控制信号。
计算机控制系统PPT_1
生产过程和计算机直接连接,并受计算机控制的 方式称为在线方式或联机方式;
生产过程不和计算机相连,且不受计算机控制, 而是靠人进行联系并做相应操作的方式称为离线方式 或脱机方式。
②实时:指信号的输入、计算和输出都要在一定的时 间范围内完成,亦即计算机对输入信息,以足够快的 速度进行控制,超出了这个时间,就失去了控制的时 机,控制也就失去了意义。
设备 口电路 作台
口电路
多路开关 A/D
D/A
多路开关
数字量输入数字量输出I/O 通道传感器及 变送器工
执行机构
业
对
象
信号检测
及变送
被控对象
2019/11/22
计算机控制系统的组成框图
第一章 绪 论
15
—计算机控制系统—
从本质上看,计算机控制系统的作用如下三个方面: ①实时数据采集:对来自测量变送装置的被控量
2019/11/22
第一章 绪 论
36
—计算机控制系统—
1-2-5 计算机控制系统的分类
现场总线控制系统 工作站 — 现场智能仪表-智能电磁流量计
结构模式为:“工作 站一现场总线智能仪 表”二层结构,降低 了成本,提高了可靠 性,并且在统一国际 标准下可实现真正的 开放式互连系统结构。
2019/11/22
2019/11/22
第一章 绪 论
25
—计算机控制系统—
1-1-2 信号特点(7)
• 零阶保持器恢复信号的示意图
y
采样信号y(kT)
原信号y(t)
恢复信号yh(t)
t
2T 4T
6T
零阶保持器算式 yh(kT+t)=y(kT)
0≤t<T, k=0, ±1,
计算机控制技术课件:第2章 模拟量输出通道2
接
多
采样保持器
V/I
通道1
PC
口
路
总
电
D/A
开
线
路
关
采样保持器
V/I
通道n
图 2-1 (b)共享D/A结构
特点:1、多路输出通道共用一个D/A转换器
2、每一路通道都配有一个采样保持放大器 3、D/A转换器只起数字到模拟信号的转换作用 4、采样保持器实现模拟信号保持功能 5、节省D/A转换器,但电路复杂,精度差,可靠低、占用
由与门、非与门组成的输入控制电路来控制3个寄存器 的选通或锁存状态。其中引脚(片选信号、低电平有 效)、(写信号、低电平有效)和BYTE1/(字节控制 信号)的组合, 用来控制 8 位输入寄存器和 4 位输入 寄存器。
(MSB) DI11 DI10 DI9 DI8 DI7 DI6 DI5 DI4
DI3 DI2 DI1 DI0 (LSB)
XFER(Transfer Control Signal):传送控制信号,输入 线, 低电平有效。
IOUT1:DAC电流输出端1,一般作为运算放大器差动输 入信号之一。
IOUT2:DAC电流输出端2,一般作为运算放大器另一个 差动输入信号。
Rfb:固化在芯片内的反馈电阻连接端,用于连接运算放 大器的输出端。
(MSB) DI7 DI6 DI5 DI4 DI3 DI2 DI1 DI0 (LSB)
ILE
CS WR1
XFER WR2
D
Q
8位 输入 寄存器
D
Q
LE1
D
Q
8位
DAC 寄存器
8位 DAC 转换器
D
Q
LE2 当LE=1时,输出数 据随输入变化。
计算机控制系统-2理论基础课件

重点 (1) 连续系统拉普拉斯变换及主要性质 (2) 传递函数与方块图 (3) 典型系统的方块图与传递函数 (4) 离散系统Z变换
难点 计算机控制系统变换函数分析与物理意义
2019/1/30
1
2.1 连续系统数学基础
2.1.1 拉普拉斯变换(略讲) 1.定义
用表示时间的函数 f (t ),而且当 示f (t ) 的拉普拉斯变换,记之为
t
e at te
at
Tz ( z 1) 2
5
z z e aT
6
1 ( s a) 2
Tze aT ( z e aT ) 2
7
( s a) 2 2
e at sin t
ze aT sin T z 2 2 ze aT cos T e2 aT
的象函数。
(1) L f1 (t ) f 2 (t ) F1 ( s ) F2 ( s ) 线性 ( 2) LAf (t )' AF ( s ) (3) L f ( t ) e ss F ( s ) (位移性质) 2019/1/30 2
2.1.2 传递函数与方块图 1.传递函数
Page
Page
8
f (t) T (a) 采样开关 f(t)
f *(t)
f *(t)
0 T …
2T 3T 4T 5T … t
0 T 2T 3T 4T 5T … t … (c) 采样信号 (b) 连续信号 图2.4 信号的采样过程
Page 9
采样的数学描述 f(t)为被采样的连续信号,f *(t)是经采样后的脉冲序列, 采样开关的采样周期为T。若采样开关的接通时间为无 限小,则采样信号f *(t)就是f(t)在开关合上瞬时的值, 即脉冲序列 f(0),f(T),f(2T),…,f(KT),… 可用理想脉冲函数将采样后的脉冲序列f*(t)表示成:
计算机控制系统电子课件

工艺数据 记录 显示 打印
设定值 SCC 计 算 机
模 拟 调 节 器
调节 测量 工 业 对 象
图1-7 SCC+模拟调节器系统
2.SCC+DDC控制系统 该系统结构形式如图1-8所示。
工艺数据 记录 显示 打印 SCC 计 算 机 设定值 D D C 控制 测量 工 业 对 象
图1-8 SCC+DDC系统
1.2.2 计算机控制系统的软件
计算机控制系统的硬件是完成控制任务的设备基础,而计 算机的操作系统和各种应用程序是履行控制系统任务的关 键,通称为软件。 软件的质量关系到计算机运行和控制效果的好坏、硬件功 能的充分发挥和推广应用。 软件主要分系统软件和应用软件: 系统软件提供计算机运行和管理的基本环境,如Windows, WinNT,UNIX等以及网络平台; 应用软件有语言加工软件,如汇编、编译软件和控制系统 的编程软件,如Siemens公司的STEP7等,由于属于专业 化的软件,它们非常方便用户的二次开发,同时也保证了 软件的安全性。
1.3.2 直接数字控制系统(DDC)
直接数字控制系统DDC是计算机在工业中应用最普遍的一 种方式。它是用一台计算机对多个被控参数进行巡回检测, 检测结果与给定值进行比较,并按预定的数学模型(如 PID控制规律)进行运算,其输出直接控制被控对象,使 被控参数稳定在给定值上,如图1-6所示。
给定值
1.主机(计算机) 主机由CPU和存储器构成。它通过过程输入通道发送来的 工业生产对象的生产工况参数,按照人们预先安排的程序, 自动地进行信息的处理、分析和计算,并作出相应的控制 决策或调节,以信息的形式通过输出通道,及时发出控制 命令。 2.常规外部设备 常规外部设备可分为输入设备、输出设备和存储设备,并 根据控制系统的规模和要求来配置。 常用的输入设备有:键盘、鼠标等,主要用来输入程序和 数据等。 常用的输出设备有:显示器、打印机等。输出设备将各种 数据和信息提供给操作人员,使其能够了解过程控制的情 况。 存储设备用来存储数据库和备份重要的数据,主要有磁盘 等。
计算机控制系统 ppt课件
计算机系统
– A/D
– D/A
– 数字计算机
ppt课件
16
§1.1 计算机控制系统的概念
计算机控制系统工作过程
实时数据采集
对被控量的瞬时值进行检测与输入 周
实时控制决策
而
根据输入量按照控制算法计算输出 复
实时控制输出
始
对执行机构发出控制信号
ppt课件
17
§1.1 计算机控制系统的概念
三、计算机控制系统的特点和优点
实时计反必算应须机和对在控输线制入,信在息线以不足一够定快的实速时度进行处理、
在线
生产过程、设备直接与计算机连接
离线
生产过程、设备不直接与计算机连接
ppt课件
14
火炮位置计算机控制系统
ppt课件
15
§1.1 计算机控制系统的概念
计算机控制系统构成
被控对象: 火炮炮身
执行机构: 直流电机
测量装置: 测量电位计、测速电机
特点:
–系统结构
模拟和数字混合
–工作方式:
计算机可控制多个回路 控制方式采用软件实现
ppt课件
18
§1.1 计算机控制系统的概念
三、计算机控制系统的特点和优点
优点
–易于实现复杂的控制规律 现代适的应控性制强系,灵统活大度多高数采用计算机控制 –性价比高 –控制与管理结合
有利于实现更高层次的自动化
§1.1 计算机控制系统的概念 §1.2计算机控制系统的发展与应用
ppt课件
4
第一章 绪论
§1.1 计算机控制系统的概念 §1.2计算机控制系统的发展与应用
ppt课件
5
§1.1 计算机控制系统的概念
第2章 计算机控制课件

过程通道起到了CPU和被控对象之间的信息传送和变换 的桥梁作用。包括模拟输入通道、模拟输出通道、数字输入 通道和数字输出通道四种,如图2-1所示。
图2-1 过程通道组成结构图
18:11
3
§第二章 输入输出接口与过程通道技术 输入输出接口概述
表2-1 生产过程输入输出信息来源与用途
信号调理
仪表放大器与普通运算放大器区别:
运算放大器只是在信号为单纯有效,而没有干 扰的情况下方可用于小信号放大;
普通运算放大器对于来自信号源的共模干扰信号 不能有效地起到抑制作用;
仪表放大器(测量放大器)具有高输入阻抗,低 输出阻抗,强抗共模干扰能力,低温漂、低失调电压 和高稳定增益。
仪表放大器广泛应用于微弱信号的检测系统中, 作为前置放大器;
信信号号调调理理
1. 桥式电路
电桥电路是 最常见的信号调 理电路之一,通 常用于微电压、 热电偶和应变测 量中。
I =1mA R16=R21=10kΩ R24=RRP2=100Ω
其它电阻≤200Ω
I1=I2≈0.5mA。
18:11
图2-3 热电偶变送器输入电路
24
§§第第二二章章输入过输程出接通口道与技过程术通道技术
工业自动化仪表采用的变送器大多是DDZ-Ⅲ型电动单 元组合仪表,采用线性集成电路,其输出信号为4~20mA的 国际标准。
18:11
41
§第二章 输入输出接口与过程通道技术
信号调理
(1)无源I/V变换 无源IIV变换主要是利用无源器件电阻来实现,并加滤 波和输出限幅等保护措施,
对于0~10mA输入信号,可取 R1=100Ω,R2=500 Ω ,且R2为精密电 阻, 这样当输入的I为0~10mA电流 时,输出的V为0~5V;
第2章计算机操作系统PPT课件
9/17/2024
大学计算机基础
用户接口
用户接口有两种类型: (1)命令接口和图形用户界面 用户 通过交互方式对计算机进行操作。 (2)程序接口 程序接口又称应用程 序接口(Application Programming Interface,API),为编程人员提供, 应用程序通过API可以调用操作系统 提供的功能。
操作系统
计算机硬件
整个计算机系统的层次结构
9/17/2024
大学计算机基础
2.1.2 操作系统的作用和功能
1. 操作系统的作用
(1) 用户和计算机硬件之间的接口 (2) 硬件功能的扩充 为用户提供了 一台功能显著增强,使用更加方便, 安全可靠性更好,效率明显提高的机 器,称为虚拟计算机(Virtual Machine)。 (3) 资源管理器
9/17/2024
大学计算机基础
4.Linux Linux是一套免费使用和自由传播的、
与Unix完全兼容的类Unix操作系统。 Linux最初是由芬兰赫而辛基大学计算
机系的学生Linus Torvalds开发的一个操 作系统内核程序,Linux以其高效性和灵 活性著称,它能够在PC机上实现Unix操作 系统的功能。
9/17/2024
大学计算机基础
实时操作系统
实时操作系统是指系统能及时(或即时)响应外 部事件的请求,在规定的时间内完成对该事件的处理, 并控制所有实时任务协调一致地运行。
根据具体应用领域不同,实时操作系统分两类: (1) 实时控制系统 (2) 实时信息处理系统
9/17/2024
大学计算机基础
2.1.4 典型操作系统简介
9/17/2024
大学计算机基础
图中进程WINWORD.EXE有4个线程, 进程explore.exe有16个线程。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
两边取Z变换,经整理得到:
[(z 1 )I T 2A c(z 1 )]X (z) T 2B c(z 1 )E (z)
两边同除以 T [ z 1] 2
其对应的状态方程为:
x u
Ac x Ccx
Bce Dce
(2)
其中
0
0
Ac
0
I n1
Bc
0
an
Cc bn' b1'
a1
1 DcБайду номын сангаас b0
(3)
于是
D (s) C c(s IA c) 1B c D c (4)
后向差分:
令
d(xt)x(k)x(k1)
dt
T
由(2)式第一式得到
_ y(k)
图1
y(t) T
计算机控制系统
r(s) +
e(s)
D(s)
G(s)
_
图2
y(s)
连续系统
设计思想: 连续系统设计方法
根轨迹法 频率特性法
离散化变换
离散系统
算法编程
控制器D(z)
缺点及适用范围: 没有考虑零阶保持器的作用(T/2的延时环节),只适用于采样
周期T较小的情况;否则,实际系统的性能与设计有较大偏差。
对应Z平面: Re z 1 0 T
(15) (16) (17)
令 zj
则 Rej10
T 即 1 0
T
从而 10
1
(18)
jw
Im
o
o
1
Re
S平面
Z平面
前向差分的特点: s平面左半平面的极点可能映射到z平面单位圆外,因而用这种方法所进行
的z变换可能是不稳定的,实际应用中一般不采用此方法。
第 2 章 常规控制规律的设计
2.3 模拟化设计方法
设计思想: 连续系统设计方法
离散化处理
对象与指标
连续控制器模型 D(s)
离散控制器模型 D(z)
特点:
(1)设计方法简单 (2)采样频率要求高 (3)具有一定的近似性
一、连续系统设计的离散等效
r(k) + e(k) D(z) u(k) ZOH u(t) G(s)
(9)
即
D(z)
U(z) E(z)
Cc1Tz1
I
Ac
1 Bc
Dc
[Cc
sIAc
1Bc
D]c
1z1 s
T
(10)
D (s) C c(s IA c) 1B c D c
于是有 D(z)D(s)s1z1 T
(11)
与 S 平面的稳定域对应关系:
S 平面的稳定域为:Re(s)<0
对应Z平面:
1z1
Re
后向差分的特点: (1)使用方便,而且不要求传递函数的因式分解; (2)当D(s)是稳定的,转换后D(z)也是稳定的; (3)不能保持D(s)脉冲响应和频率响应不畸变; (4)是一种近似的变换方法。
前向差分:
令
d(xt)x(k1)x(k)
dt
T
推导得到
D(z)D(s)sz1 T
S 平面的稳定域为:Re(s)<0
T
RezzT10
(12)
令 zj
则 Rejj10
即
R (( e jj ) 1 )( ( jj)) R 2 e 2 2 2 j 2 2 22 0
(13)
上式可以写成
122
2
12 2
jw
(14)
Im (1/2, 0)
o
o
Re
S平面
Z平面
即 Re z 1 0 z 1
令 zj
则 Rejj10
即
R e jj 1 1 R e2 ( 1 1 ) 22 j2 2 0
(25)
上式可以写成
22 1
(26)
jw
Im
o S平面
o
Re 1
Z平面
双线性变换的特点:
(1)将整个s左半平面变换为z平面单位圆内,因此没有频率混叠效应。 (2)D(s)稳定,则相应的D(z)也稳定。 (3)D(z)的频率响应在低频段与D(s)的频率响应相近,而在高频段相对
处理混叠现象的方法: (1)串联低通滤波器:导致控制器复杂 (2)增大采样频率:增加硬件实现难度
因此,实际很少使用次方法进行离散化处理。
2、差分变化法 变量导数
有限差分
对象
D ( s ) U E ( ( s s ) ) b s 0 n s n a b 1 s 1 s n n 1 1 a b n n b 0 s n b 1 's a n 1 s 1 n 1 b n 'a n (1)
表征模拟控制器的重要参数有:
(1)极点与零点的数目 (2)频带宽度与截止频率 (3)控制器增益 (4)相位裕度 (5)增益裕度 (6)超调量 (7)闭环频率响应峰值
离散化处理过程中应尽量满足上述特性。
1、Z变换法
D (s)
z esT
D (z)
优点: (1)D(z)与D(s)的脉冲响应相同; (2)D(s)稳定,则D(z)稳定; (3)是一种精确的变换方法。 缺点: (1)D(z)存在频率失真(如果D(s)不是有限带宽,容易出现混叠现象); (2)D(s)复杂,则变换困难。
,得到
2z1 [Tz1IA c]X(z)BcE(z)
即 X(z)[T 2z z 1 1IA c]1B cE(z)
(21)
由 (2)式第二式,有
U ( z ) C c X ( z ) D c E ( z ) C c T 2 z z 1 1 I A c 1 B c E ( z ) D c E ( z ) (22)
x(k) T x(k1 )A cx(k)B ce(k)
于是
1Tz1IAcX(z)BcE(z)
即
X(z)1Tz1IAc1BcE(z)
(5)
(6) (7) (8)
由(2)式第二式,并结合(8)式得到
U (z ) C c X (z ) D c E (z ) C c 1 T z 1I A c 1 B c E (z ) D c E (z )
3、双线性变化法 由状态方程(2)式
x Ac x Bce u Cc x Dce
设T为离散化步距,对上式第一式两边在区间[kT,(k+1)T]上进行积分,有
(k 1 )T
x (k 1 ) x (k T ) k T
[A c x (t) B c e (t)]d t
(19)
利用近似积分的梯形规则,有
即
D(z)U(z) E(z)
CcT2zz11I
Ac1Bc
Dc
[Cc sIAc 1Bc Dc]s2z1 Tz1
D (s) C c(s IA c) 1B c D c
(23)
于是有
D(z)D(s) 2z1 s Tz1
(24)
与 S 平面的稳定域对应关系:
S 平面的稳定域为:Re(s)<0
对应Z平面: Re 2 z 1 0 T z 1