2017年中国研究生数学建模竞赛题
2017年 中国研究生 数学建模 竞赛D题
2017年中国研究生数学建模竞赛D题基于监控视频的前景目标提取视频监控是中国安防产业中最为重要的信息获取手段。
随着“平安城市”建设的顺利开展,各地普遍安装监控摄像头,利用大范围监控视频的信息,应对安防等领域存在的问题。
近年来,中国各省市县乡的摄像头数目呈现井喷式增长,大量企业、部门甚至实现了监控视频的全方位覆盖。
如北京、上海、杭州监控摄像头分布密度约分别为71、158、130个/平方公里,摄像头数量分别达到115万、100万、40万,为我们提供了丰富、海量的监控视频信息。
目前,监控视频信息的自动处理与预测在信息科学、计算机视觉、机器学习、模式识别等多个领域中受到极大的关注。
而如何有效、快速抽取出监控视频中的前景目标信息,是其中非常重要而基础的问题[1-6]。
这一问题的难度在于,需要有效分离出移动前景目标的视频往往具有复杂、多变、动态的背景[7,8]。
这一技术往往能够对一般的视频处理任务提供有效的辅助。
以筛选与跟踪夜晚时罪犯这一应用为例:若能够预先提取视频前景目标,判断出哪些视频并未包含移动前景目标,并事先从公安人员的辨识范围中排除;而对于剩下包含了移动目标的视频,只需辨识排除了背景干扰的纯粹前景,对比度显著,肉眼更易辨识。
因此,这一技术已被广泛应用于视频目标追踪,城市交通检测,长时场景监测,视频动作捕捉,视频压缩等应用中。
1下面简单介绍一下视频的存储格式与基本操作方法。
一个视频由很多帧的图片构成,当逐帧播放这些图片时,类似放电影形成连续动态的视频效果。
从数学表达上来看,存储于计算机中的视频,可理解为一个3维数据X∈ℝw×h×t,其中w,h代表视频帧的长,宽,t代表视频帧的帧数。
视频也可等价理解为逐帧图片的集合,即X={ℝ1,ℝ2,⋯,ℝℝ},其中ℝℝ∈ℝw×h(ℝ=1,2,⋯,t)为一张长宽分别为w,h的图片。
3维矩阵的每个元素(代表各帧灰度图上每个像素的明暗程度)为0到255之间的某一个值,越接近0,像素越黑暗;越接近255,像素越明亮。
中国研究生数学建模大赛往年题
我国研究生数学建模大赛是一个旨在提高研究生数学建模能力和创新能力的比赛评台。
接下来我们将介绍过去几年的比赛题目。
2019年我国研究生数学建模大赛题目:该题目以“新能源汽车充电站规划”为主题,要求参赛者基于对相关数据和背景资料的分析,设计出最佳的新能源汽车充电站规划方案,并给出合理的规划建议。
这个题目涉及到了运筹学、优化理论和经济学等多个学科的知识,参赛者需要在规定时间内完成数据处理、模型建立和解决方案的实施等多项任务。
2018年我国研究生数学建模大赛题目:2018年的比赛以“海洋渔业资源的可持续利用”为主题,参赛者需要通过收集和分析相关的渔业数据,建立数学模型,评估海洋渔业资源的现状和未来发展趋势,同时提出可持续利用建议。
这个题目对于参赛者的数据处理和分析能力以及对渔业资源可持续发展的认识能力提出了挑战。
2017年我国研究生数学建模大赛题目:2017年比赛的主题是“交通拥堵问题及其解决方案”,参赛者需要通过对交通数据的分析和处理,构建数学模型,找出拥堵问题的根源和解决方案,并对模型的可行性和实用性进行评估。
这个题目考察了参赛者在交通工程、数学建模和解决实际问题方面的综合能力。
通过对以上几年的题目内容的介绍,我们可以看出我国研究生数学建模大赛的题目涉及范围广泛,覆盖了生活的方方面面,如新能源汽车、海洋渔业资源利用和交通拥堵等。
这些题目旨在让参赛者运用数学建模的方法解决实际问题,培养他们的综合素质和实际应用能力。
这些题目也反映了社会对于相关领域问题的关注和需求,通过比赛的方式来促进学术和社会的交流与共同进步。
希望未来的比赛中,能够继续推出更多富有挑战性和创新性的题目,吸引更多对数学建模感兴趣的研究生参与,为推动学科发展做出更多的贡献。
我国研究生数学建模大赛自2004年举办以来,已经成为了国内研究生数学建模领域的重要赛事,吸引了大量研究生们的积极参与。
在这个比赛中,参赛者不仅仅是在解决数学问题,更是在应用和实践数学知识,将数学理论与实际问题相结合。
2017年中国研究生数学建模竞赛C题
2017年中国研究生数学建模竞赛C题航班恢复问题1.背景随着经济的发展,航空出行已成为越来越多旅客的选择。
但众所周知,飞机航班如果不能按原计划执行,不仅会给航空公司造成巨大的经济损失,同时还会给旅客出行带来极大的不便。
在造成航班不正常的种种因素中,有些是不可抗阻的自然因素,如暴风雪、飓风等,有些是不可预测的突发事件,如突发恐怖袭击、飞机机械故障等等,还有些是因为管理手段的落后,比如飞行员缺位、空中管制,等等。
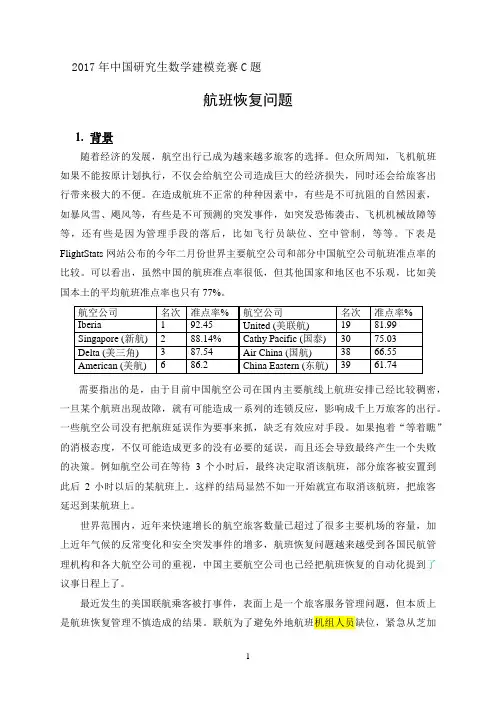
下表是FlightStats网站公布的今年二月份世界主要航空公司和部分中国航空公司航班准点率的比较。
可以看出,虽然中国的航班准点率很低,但其他国家和地区也不乐观,比如美国本土的平均航班准点率也只有77%。
需要指出的是,由于目前中国航空公司在国内主要航线上航班安排已经比较稠密,一旦某个航班出现故障,就有可能造成一系列的连锁反应,影响成千上万旅客的出行。
一些航空公司没有把航班延误作为要事来抓,缺乏有效应对手段。
如果抱着“等着瞧”的消极态度,不仅可能造成更多的没有必要的延误,而且还会导致最终产生一个失败的决策。
例如航空公司在等待3个小时后,最终决定取消该航班,部分旅客被安置到此后2小时以后的某航班上。
这样的结局显然不如一开始就宣布取消该航班,把旅客延迟到某航班上。
世界范围内,近年来快速增长的航空旅客数量已超过了很多主要机场的容量,加上近年气候的反常变化和安全突发事件的增多,航班恢复问题越来越受到各国民航管理机构和各大航空公司的重视,中国主要航空公司也已经把航班恢复的自动化提到了议事日程上了。
最近发生的美国联航乘客被打事件,表面上是一个旅客服务管理问题,但本质上是航班恢复管理不慎造成的结果。
联航为了避免外地航班机组人员缺位,紧急从芝加哥基地调遣机组前往。
由于机组缺位造成的航班中断有扩散到整个网络的可能,联航赋予了他们很高的登机优先级。
这些都是正确的决策并且被正确地执行了,但在最后环节,联航工作人员没有能把座位“拍卖”坚持到最后时刻,从而导致了世界民航史上的这一重大事件的发生,给联航造成了不可挽回的重大损失。
2017年全国研究生数学建模竞赛题
2017年全国研究生数学建模竞赛题D如果有,请给出建模方案,包括可能的数学公式,不同温度和偏置电流下的带宽响应曲线,并与问题3的模型进行比较。
1 附录1:激光器L-I 模型一般认为,VCSEL 的各参数间满足如下规律:()()()0,th T I P I N T η-= (1)其中:0P :激光器输出的光功率,在L-I 中光功率也用L 来表示,即L-I 也可以写成P-II :注入到激光器的外部驱动电流,包含外部加载的偏置电流Ib 和信号电流,在无信号时为偏置电流Ib()T η :L-I 曲线的斜率,从能量转换角度看,斜率对应于转换效率(L-I 曲线横坐标是电流I ,纵坐标是出光功率P ,斜率越高,相同电流I 对应的输出光功率越高,相同电能转换为的光能越多,即转换效率越高);与温度相关(),th I N T :阈值电流;激光器电流超过该值则激光发光;与载流子数和温度相关N :载流子数假设:1. 转换效率()T η受温度影响较小,即()T η近似于常数η ;2. ()()0,th th off I N T I I T =+其中0th I 为常数,()off I T 是与温度相关的经验热偏置电流(即激光器内部的偏置电流,随激光器温度的变化而变化,有别于外部人为加载的激光器偏置电流Ib )。
这样(1)式可以简化为()()00th off P I T I I η=--(2)将()off I T 表示为:()0n off n n I T T a ∞==∑(3)式错误!未找到引用源。
中的温度T 受外界环境温度0T 和自身的温度影响,自身的温度与器件产生的瞬时功率VI 相关,即受V-I 特性(电压-电流特性)影响:()00th thdT IV P R T tT d τ+=-- (5)th R :VCSEL 热阻抗|th τ :热时间常数0T :环境温度I :偏置电流Ib (输入电流)V :输入电压式(2)-(5)就是VCSEL 的一种经验模型,其中的参数需要根据实验数据确定,表1给出的仅是一组(并非最佳)参考初值:表1 L-I 模型初值设置即模型参数提取参数参考初值 单位 η0.5 - 0th I 0.3E-3 A th R2.6E3 ℃/W 0a 1.246E-3 A 1a -2.545E-5 A/K 2a 2.908E-7A/K 23a -2.531E-10 A/K 3 4a1.022E-12A/K 42 附录2:基于速率方程的带宽模型推导将偏置电流和注入激光器的外部驱动电流代入激光器速率方程,得到:()()()()0000011i th off n p n G dN N I I I T N N Sdt q S G dS N N S S S N dt ετεηβττ-⎧--⎪+⎪⎨-⎪⎪+==-++⎩-- (6)VCSEL 输出的光功率与光子数成正比,假定比例因子为k0P kS = (7)VCSEL 的小信号响应建模的思路为:1. 求出稳态下的电流s I 、载流子数s N 、光子数s S ;稳态,即无驱动信号情况下,激光器中的电流为直流信号,此时电流是稳定的,载流子数、光子数也都是稳定的;2. 加载小信号(小信号为信号幅度非常小的信号,不同频率处的信号幅度不同,因此小信号是与频率相关的小幅度信号),可以假定小信号引入了与频率相关的电流、载流子数、光子数,数学表达可以写成:()i f ,()n f ,()s f3. 给VCSEL 加载上小信号后,原来速率方程中的电流、载流子数、光子数N :载流子数t : 时间i η:注入效率;或转换效率;q :物理常量,电子电量,1.6×10-19库伦0N :透明载流子数,当载流子数N 大于透明载流子数的时候,激光器有源区发生粒子束反转,满足产生激光的其中一个条件 I :注入的外部驱动电流;I off (T ):与温度相关的偏置电流 n τ :载流子复合寿命p τ :光子寿命(p: Photon, 光子)0G :增益系数,激光产生的阈值条件,增益大于总损耗; S :光子数β :受激辐射耦合系数 ε :增益压缩因子则表示为稳态下的值与小信号下引入信号变化的值的和。
2017年全国研究生数学建模竞赛B题
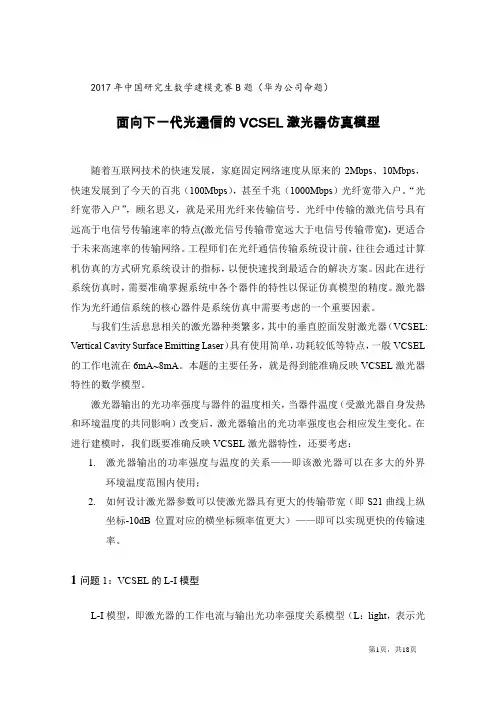
2017年中国研究生数学建模竞赛B题(华为公司命题)面向下一代光通信的VCSEL激光器仿真模型随着互联网技术的快速发展,家庭固定网络速度从原来的2Mbps、10Mbps,快速发展到了今天的百兆(100Mbps),甚至千兆(1000Mbps)光纤宽带入户。
“光纤宽带入户”,顾名思义,就是采用光纤来传输信号。
光纤中传输的激光信号具有远高于电信号传输速率的特点(激光信号传输带宽远大于电信号传输带宽),更适合于未来高速率的传输网络。
工程师们在光纤通信传输系统设计前,往往会通过计算机仿真的方式研究系统设计的指标,以便快速找到最适合的解决方案。
因此在进行系统仿真时,需要准确掌握系统中各个器件的特性以保证仿真模型的精度。
激光器作为光纤通信系统的核心器件是系统仿真中需要考虑的一个重要因素。
与我们生活息息相关的激光器种类繁多,其中的垂直腔面发射激光器(VCSEL: Vertical Cavity Surface Emitting Laser)具有使用简单,功耗较低等特点,一般VCSEL 的工作电流在6mA~8mA。
本题的主要任务,就是得到能准确反映VCSEL激光器特性的数学模型。
激光器输出的光功率强度与器件的温度相关,当器件温度(受激光器自身发热和环境温度的共同影响)改变后,激光器输出的光功率强度也会相应发生变化。
在进行建模时,我们既要准确反映VCSEL激光器特性,还要考虑:1.激光器输出的功率强度与温度的关系——即该激光器可以在多大的外界环境温度范围内使用;2.如何设计激光器参数可以使激光器具有更大的传输带宽(即S21曲线上纵坐标-10dB位置对应的横坐标频率值更大)——即可以实现更快的传输速率。
1问题1:VCSEL的L-I模型L-I模型,即激光器的工作电流与输出光功率强度关系模型(L:light,表示光功率强度,也可以表示为P ;I :Intensity of current ,表示工作电流)。
激光器是将电能转换成光能的半导体器件,能量转换的过程,也是电子的电能转换为光子的光能的过程,在转换过程中,伴随着电子的运动,半导体器件会产生一定的热量。
数学建模国赛17年d题2
前 i 段的时间间隔之和大于第 i 段末尾巡检点的累计时间 gik ,但不超过第 i 1段首位巡检
点的累计时间 gi1,1 ,即
i
gik yh gi1,1, i 1, 2,..., m
h1
目标函数为求 m 的最小值,即
min f m
汇总得
(7) (8)
5
min f m
(1)固定时间上班,不考虑巡检人员的休息时间和吃饭时间; (2)固定时间上班,考虑巡检人员的休息时间和吃饭时间; (3)错时上班,不考虑巡检人员的休息时间和吃饭时间; (4)错时上班,考虑巡检人员的休息时间和吃饭时间; 每班至少需要多少人?巡检线路和时间表如何安排?
二、问题分析
题目要求:(1)把所有的巡检点都要遍历;(2)耗费的人力资源尽可能少;(3)巡检人 员的工作量尽可能均衡;(4)巡检人员上班时间固定或错时上班;(5)巡检人员有休息时间 和吃饭时间;(6)每天三班倒;(7)每班工作 8 小时;
方案的优劣就体现在两个方面,其一是人员空闲时间;其二是人员加班时间。 设最短回路被划分为 p1, p2,..., pm 段,各段对应的巡检耗时(不包括走路时间)分别为
q1, q2,..., qm ,每一段安排一名巡检工人,需要 m 个工人。
设第 i 人的空闲时间和加班时间(巡检耗时和走路时间)分别为i , i ,根据假设(2),
i 1
(11)
其中, k 1,2,3 分别表示早班、中班和晚班。
若人力资源消耗量,可通过设计 3 天的轮班,就能使得不同班次(早班、中班、晚班) 的人力资源消耗量绝对均衡。
根据假设(4),每天人力资源耗费量为
3
=k
k 1
若人力资源消耗量,可以 3m 天为周期轮换,就实现了一个轮岗轮班大循环,实现了人力 资源耗费量的绝对均衡。
2017数学建模国赛题目
2017数学建模国赛题目(原创版)目录一、2017 数学建模国赛题目概述二、题目 A:空中交通管制1.题目背景及要求2.题目分析3.建模思路与方法三、题目 B:城市交通信号控制1.题目背景及要求2.题目分析3.建模思路与方法四、题目 C:新能源汽车充电设施规划1.题目背景及要求2.题目分析3.建模思路与方法五、总结正文一、2017 数学建模国赛题目概述2017 年全国大学生数学建模竞赛的题目分为 A、B、C 三个题目,分别涉及空中交通管制、城市交通信号控制和新能源汽车充电设施规划三个领域。
这些题目旨在考验参赛选手的数学建模能力、创新思维和团队协作精神,以及运用数学方法解决实际问题的能力。
二、题目 A:空中交通管制1.题目背景及要求题目 A 的背景是在未来,无人机和飞行汽车等空中交通工具将逐渐普及,如何有效地对空中交通进行管制以确保安全和效率。
题目要求参赛选手建立一个空中交通管制系统,通过优化算法和数学模型对空中交通进行实时监控和调度。
2.题目分析此题需要参赛选手充分了解无人机和飞行汽车的运行特点,以及空中交通管制的基本原理。
此外,需要运用运筹学、优化方法等相关知识,建立一个能够实现空中交通实时监控和调度的数学模型。
3.建模思路与方法首先,需要对无人机和飞行汽车的飞行数据进行收集和整理,建立一个飞行数据库。
其次,根据空中交通管制的基本原理,建立一个空中交通管制的数学模型。
最后,运用优化算法对模型进行求解,实现空中交通的实时监控和调度。
三、题目 B:城市交通信号控制1.题目背景及要求题目 B 的背景是城市交通信号控制问题,要求参赛选手设计一个信号控制系统,使得城市道路交通更加顺畅、安全和环保。
2.题目分析此题需要参赛选手充分了解城市交通信号控制的基本原理和方法,以及道路交通流的运行特点。
此外,需要运用运筹学、优化方法等相关知识,建立一个能够实现城市交通信号控制的数学模型。
3.建模思路与方法首先,需要对城市道路交通流的数据进行收集和整理,建立一个交通流数据库。
2017年国赛建模b题.doc
2017年国赛建模b题.doc1.寻找可能与现有定价方案有关的因素,研究附件一中项目的任务定价规律并分析任务未完成的原因。
2.基于上述原因的讨论,设计新的任务定价方案并与原方案的效果进行比较。
3.实际情况中,某些位置如市中心的任务点较为集中,从而导致用户争相选择,限制了其余任务的接受度。
通过将这些任务联合在一起打包发布的方法,修正已有的定价模型并分析对任务完成情况的影响。
4.结合前三问分析讨论,给出对附件三中新项目的定价方案,并评价该方案的实施效果。
其中附件一是一个已结束项目的任务数据,包含了每个任务的位置、定价和完成情况;附件二是会员信息数据,包含了会员的位置、信誉值、参考其信誉给出的任务开始预订时间和预订限额;附件三是一个新的检查项目任务数据。
解题思路:1、对研究任务定价规律的问题,我们可以先观察附件所给的任务点及会员位置,并对两组点进行聚类,分析点分布与任务定价之间可能存在的联系;然后令所有可能的联系作为定价的影响指标,通过灰色关联分析的方法确定其间的相关程度;选取相关度较高的指标作为拟合因子,与附件一所给数据进行拟合得到拟合关系式,即为我们求得的任务定价规律;最后我们需要对拟合结果与实际结果作图对比,讨论造成误差的原因。
对分析任务未完成原因的问题,我们可以采用支持向量机的方法以任务完成与否为标准,选取价格和不同影响指标分别进行分类,最终分析结果讨论可能的原因。
2、问题二的新的定价方案设计问题实际上是一个优化问题。
由于附件一中任务定价存在某种不合理性导致了任务完成率低下,从企业定价的角度考虑,一个较优的定价方案应当让企业化费尽可能少的成本去得到更多的市场调查信息,因此,我们将设计新的定价方案看做个双目标优化问题,即在各种约束条件下设计出一个可以使得成本最小化、任务完成率最大化的定价方案。
在考虑最优定价方案时,不能完全从发布任务的企业角度来考虑,应当考虑到现实中任务被会员预定的过程中存在的规则。
华为杯第十四届中国研究生数学建模竞赛
该问是在“面—点”联合规划的基础上,在一级服务范围和物流节点数量不 变的前提下,设计 ULS 网络构成。ULS 网络由区域外(物流园区与一级节点)、 区域间(一级节点间)、区域内(一级区域内部)三部分构成。
区域外网络架构与物流园区货运总量相关,根据物流园区货运总量确定其与 相应一级节点间管道建设方案和管道流量,以保证进出 4 个物流园区的货物尽最 大可能放入地下运输。
2.1 问题一的分析
基于“面点线多模块网络层次分析法”,该问是对 ULS 的 “面—点”联合 规划,目的在于确定满足该地区物流需求和 ULS 物流节点约束的地下物流系统 基本构架,该构架包括各级节点数量和位置、各节点的服务范围等信息。本文采 用由下至上的双层节点选址规划方法,首先采用集合覆盖法确定二级节点的位置 及相应的二级服务范围,即底层规划;将所有二级节点作为备选一级节点,采用 CFLP 法确定固定数量的一级节点选址信息,即上层优化。各层优化均包含大量 的决策变量和约束条件,采用 LINGO 编程求解可大幅度降低求解难度。
参赛密码 (由组委会填写)
“华为杯”第十四届中国研究生 数学建模竞赛
学 校 武汉大学 参赛队号 10486024
1. 张黎明 队员姓名 2. 徐业琰
3. 杨铮
1
参赛密码 (由组委会填写)
“华为杯”第十四届中国研究生 数学建模竞赛
题目
2017 年中国研究生数学建模竞赛 F 题
构建地下物流系统网络ULS 物流节点选址规划方法,底层为二级节点 选址规划,以二级节点数量最少为目标,将 110 个区域中心点作为备选二级节点, 采用集合覆盖方法安排尽量少的二级节点满足系统缓解交通拥堵和货物运输需 求。上层为一级节点选址规划,采用 CFLP 法,以 28 个二级节点作为备选一级 节点,从中安排固定数量的一级节点,使各二级节点到对应隶属一级节点以及各
2017数学建模国赛赛题
2017数学建模国赛赛题一、问题背景与分析1.1 赛题背景2017年数学建模国赛赛题旨在考察参赛选手对于数学建模的理解和应用能力。
题目涵盖多个领域的知识,要求选手在给定的条件下,运用数学方法进行分析和建模,并给出切实可行的解决方案。
1.2 问题分析本次赛题涉及到XXX方面的问题(根据赛题实际情况,替换XXX 为具体领域)。
二、问题描述2.1 赛题背景描述(根据赛题实际情况,描述涉及领域的基本背景)2.2 问题陈述(根据赛题实际情况,描述具体问题,并给出条件和要求)三、模型建立与求解3.1 假设与符号定义(根据赛题实际情况,对问题进行假设,说明符号定义)3.2 模型建立(根据赛题实际情况,运用数学方法建立相应模型,并给出相应方程式或算法)3.3 模型求解(根据赛题实际情况,运用适当的数值计算方法对模型进行求解,并给出计算结果)四、结果分析与讨论4.1 结果展示(根据赛题实际情况,给出模型求解的结果,以表格、图示等方式展示)4.2 结果分析(根据赛题实际情况,对结果进行分析和解释,讨论结果的合理性和可行性)五、模型的优缺点与改进5.1 模型的优点(根据赛题实际情况,总结模型的优点,包括准确性、可靠性、适用性等方面)5.2 模型的缺点(根据赛题实际情况,指出模型的不足之处,可能存在的局限性或假设的不合理性)5.3 模型的改进(根据赛题实际情况,提出改进模型的方法或思路)六、总结6.1 主要内容回顾(对文章中的重要内容进行回顾,概括模型建立与求解的过程)6.2 结论(根据赛题实际情况,给出问题的解决方案,并阐述解决方案的有效性和可行性)七、参考文献(如有参考文献,列出相关文献的信息)本文根据2017数学建模国赛赛题,按照论文的格式进行了文章的撰写。
通过分析问题背景与条件、建立数学模型、求解模型,最终得出了切实可行的解决方案。
在模型建立与求解的过程中,我们运用了适当的数学方法和计算算法,对结果进行了分析和讨论,并提出了模型的优缺点和改进思路。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
2017年中国研究生数学建模竞赛D题
基于监控视频的前景目标提取
视频监控是中国安防产业中最为重要的信息获取手段。
随着“平安城市”建设的顺利开展,各地普遍安装监控摄像头,利用大范围监控视频的信息,应对安防等领域存在的问题。
近年来,中国各省市县乡的摄像头数目呈现井喷式增长,大量企业、部门甚至实现了监控视频的全方位覆盖。
如北京、上海、杭州监控摄像头分布密度约分别为71、158、130个/平方公里,摄像头数量分别达到115万、100万、40万,为我们提供了丰富、海量的监控视频信息。
目前,监控视频信息的自动处理与预测在信息科学、计算机视觉、机器学习、模式识别等多个领域中受到极大的关注。
而如何有效、快速抽取出监控视频中的前景目标信息,是其中非常重要而基础的问题[1-6]。
这一问题的难度在于,需要有效分离出移动前景目标的视频往往具有复杂、多变、动态的背景[7,8]。
这一技术往往能够对一般的视频处理任务提供有效的辅助。
以筛选与跟踪夜晚时罪犯这一应用为例:若能够预先提取视频前景目标,判断出哪些视频并未包含移动前景目标,并事先从公安人员的辨识范围中排除;而对于剩下包含了移动目标的视频,只需辨识排除了背景干扰的纯粹前景,对比度显著,肉眼更易辨识。
因此,这一技术已被广泛应用于视频目标追踪,城市交通检测,长时场景监测,视频动作捕捉,视频压缩等应用中。
下面简单介绍一下视频的存储格式与基本操作方法。
一个视频由很多帧的图片构成,当逐帧播放这些图片时,类似放电影形成连续动态的视频效果。
从数学表达上来看,存储于计算机中的视频,可理解为一个3维数据,其中代表视频帧的长,宽,代表视频帧的帧数。
视频也可等价理解为逐帧图片的集合,即,其中为一张长宽分别为
的图片。
3维矩阵的每个元素(代表各帧灰度图上每个像素的明暗程度)为0到255之间的某一个值,越接近0,像素越黑暗;越接近255,像素越明亮。
通常对灰度值预先进行归一化处理(即将矩阵所有元素除以255),可将其近似认为[0,1]区间的某一实数取值,从而方便数据处理。
一张彩色图片由R(红),G(绿),B(蓝)三个通道信息构成,每个通道均为同样长宽的一张灰度图。
由彩色图片
构成的视频即为彩色视频。
本问题中,可仅考虑黑白图片构成的视频。
在Matlab 环境下,视频的读取、播放及相应基本操作程序见附件1。
如采用其他编程环境,也可查阅相关资料获得相应操作程序。
题目的监控视频主要由固定位置监控摄像头拍摄,要解决的问题为提取视频前景目标。
请研究生通过设计有效的模型与方法,自动从视频中分离前景目标。
注意此类视频的特点是相对于前景目标,背景结构较稳定,变化幅度较小,可充分利用该信息实现模型与算法设计。
请你们查阅相关资料和数据,结合视频数据特点,回答下列问题:
问题1:对一个不包含动态背景、摄像头稳定拍摄时间大约5秒的监控视频,构造提取前景目标(如人、车、动物等)的数学模型,并对该模型设计有效的求解方法,从而实现类似图1的应用效果。
(附件2提供了一些符合此类特征的监控视频)
图1 左图:原视频帧;右图:分离出的前景目标
问题2:对包含动态背景信息的监控视频(如图2所示),设计有效的前景目标提取方案。
(附件2中提供了一些符合此类特征的典型监控视频)
图2 几种典型的动态视频背景,:树叶摇动,水波动,喷泉变化,窗帘晃动
问题3:在监控视频中,当监控摄像头发生晃动或偏移时,视频也会发生短暂的抖动现象(该类视频变换在短时间内可近似视为一种线性仿射变换,如旋转、平移、尺度变化等)。
对这种类型的视频,如何有效地提取前景目标?(附件2中
提供了一些符合此类特征的典型监控视频,其它一些典型视频可从
问题4:在附件3中提供了8组视频(avi文件与mat文件内容相同)。
请利用你们所构造的建模方法,从每组视频中选出包含显著前景目标的视频帧标号,并将其在建模论文正文中独立成段表示。
务须注明前景目标是出现于哪一个视频(如Campus视频)的哪些帧(如241-250,421-432帧)。
问题5:如何通过从不同角度同时拍摄的近似同一地点的多个监控视频中(如图3所示)有效检测和提取视频前景目标?请充分考虑并利用多个角度视频的前景之间(或背景之间)相关性信息(一些典型视频可从
图3 在室内同一时间从不同角度拍摄同一地点获得的视频帧
问题6:利用所获取前景目标信息,能否自动判断监控视频中有无人群短时聚集、人群惊慌逃散、群体规律性变化(如跳舞、列队排练等)、物体爆炸、建筑物倒塌等异常事件?可考虑的特征信息包括前景目标奔跑的线性变化形态特征、前景规律性变化的周期性特征等。
尝试对更多的异常事件类型,设计相应的事件检测方案。
(请从网络下载包含各种事件的监控视频进行算法验证)
注:强烈建议深刻考虑问题内涵,建造合理、高效的数学模型和求解方法,鼓励进行具有开放思路与创新思维的探索性尝试。
参考文献:
[1] Andrews Sobral & Antoine Vacavant, A comprehensive review of background subtraction algorithms evaluated with synthetic and real videos, Computer Vision and Image Understanding, V olume 122, May 2014, Pages 4-21
[2] B. Lee and M. Hedley, “Background estimation for video surveillance,” IVCNZ02, pp. 315–320, 2002.
[3] C. Stauffer and W. E. L. Grimson, “Adaptive background mixture models for
real-time tracking,” in Computer Vision and Pattern Recognition, 1999. IEEE Computer Society Conference on., vol. 2. IEEE, 1999.
[4] E. J. Cand`es, X. Li, Y. Ma, and J. Wright, “Robust principal component analysis?” Journal of the ACM (JACM), vol. 58, no. 3, p. 11, 2011.
[5] D. Meng and F. De la Torre, “Robust matrix factorization with unknown noise,” in IEEE International Conference on Computer Vision, 2013, pp. 1337–1344.
[6] Q. Zhao, D. Meng, Z. Xu,W. Zuo, and L. Zhang, “Robust principal component analysis with complex noise,” in Proceedings of the 31st International Conference on Machine Learning (ICML-14), 2014, pp. 55–63.
[7] Y. Peng, A. Ganesh, J. Wright, W. Xu, and Y. Ma, “RASL: Robust alignment by sparse and low-rank decomposition for linearly correlated images,” Pattern Anal ysis and Machine Intelligence, IEEE Transactions on, vol. 34, no. 11, pp. 2233–2246, 2012.
[8] M. Babaee, D. T. Dinh, and G. Rigoll, “A deep convolutional neural network for background subtraction,” arXiv preprint arXiv: 1702.01731, 2017.。