创新方法--飞思卡尔智能车
飞思卡尔智能车 电磁组 技术报告
//#define K10
//#define Kp 1;//PID的//#define Kd 1;
#include <hidef.h>
#include <stdio.h>
#include <math.h>
#include <MC9S12XS128.h>
3.1.3
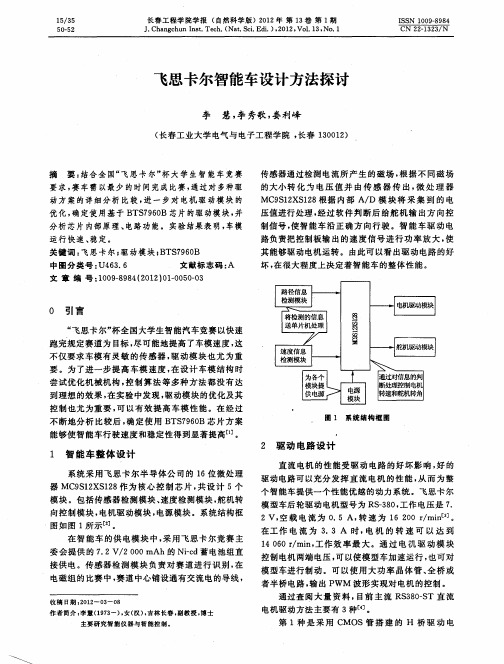
考虑到适当增加力臂来提高舵机的灵敏度和为了赛车布局的的紧凑,采取了如图3.2所示的安装方法。
图3.2舵机安装结构
3.1.4
采用接插件与焊接结合的方式连接传感器、主控板、编码器、电机驱动电路、电机、赛道起始检测等单元,既考虑可靠性,又兼顾结构调整与安装的便利性。具体安装结构如图3.3所示,
图3.3主控板安装结构
[6]卓晴.基于磁场检测的寻线小车传感器布局研究[J].清华大学.2009
[7]杨延玲.载流直导线的电磁场特性分析[J].山东师范大学.2007
[8]王毅敏.马丽英等.一种改进的数字PID控制算法及其在励磁系统中的应用电网技术[J].1998
[9]高金源,夏洁.计算机控制系统[M].清华大学出版社.2007
本校积极组队参加第六届“飞思卡尔”杯全国大学生智能汽车竞赛。从2010年底着手准备,历时半年多,经过不断试验设计,最终设计出较为完整的智能赛车。在赛区比赛中获得了较好的综合性能和成绩。
在本次比赛中,采用大赛组委会统一提供的竞赛车模,采用飞思卡尔16位微控制器MC9S12XS128作为核心控制单元,构思控制方案及系统设计,进行包括机械结构的调整与优化,硬件的设计与组装、软件控制算法的编写与改进等过程(小车上的具体方案模块有传感器信号采集处理、控制算法及执行、动力电机驱动、转向舵机控制等)从而实现小车智能化的识别道路,最终实现智能化竞速。
飞思卡尔智能车竞赛设计方案
飞思卡尔智能车竞赛设计⽅案“神马”队设计⽅案摘要本⽂以“飞思卡尔”杯全国⼤学⽣智能车竞赛为主题,介绍了智能赛车从机械结构设计到控制系统的软硬件设计流程。
本次⽐赛使⽤竞赛秘书处统⼀指定的竞赛车模及套件,采⽤飞思卡尔半导体公司的16位微控制器作为核⼼控制单元,配合不同类型的传感器、驱动电机、转向舵机、直流电池、以及相应的驱动电路,使赛车能够⾃主识别路径,并控制模型车⾼速稳定地在跑道上运⾏,在规定时间内完成跑完赛道的任务。
第⼀章背景1.1“飞思卡尔”杯背景介绍“飞思卡尔”杯全国⼤学⽣智能车竞赛是在飞思卡尔半导体公司资助下举办的以S12 单⽚机为核⼼的⼤学⽣课外科技竞赛。
使⽤⼤赛组委会统⼀提供的竞赛车模、转向舵机、直流电机和可充电式电池,采⽤飞思卡尔 16 位微控制器MC9S12DB128B作为核⼼控制单元,⾃主构思控制⽅案及系统设计,包括传感器信号采集处理、控制算法及执⾏、电机驱动、转向舵机控制等,完成智能车⼯程制作及调试,于指定⽇期与地点参加场地⽐赛。
⽐赛成绩主要由赛车在现场成功⾏驶完赛道的时间为主。
全国⼤学⽣智能汽车竞赛所使⽤的车模是⼀款带有差速器的后轮驱动模型赛车,它由⼤赛组委会统⼀提供。
参赛队伍通过设计单⽚机的⾃动控制器控制模型车在封闭的跑道上⾃主循线运⾏。
在保证模型车运⾏稳定,即不冲出跑道的前提下,跑完两圈的时间越⼩成绩越好。
设计⾃动控制器是制作智能车的核⼼环节。
⾃动控制器是以单⽚机为核⼼,配合有传感器、电机、舵机、电池、以及相应的驱动电路,它能够⾃主识别路径,控制模型车⾼速稳定运⾏在跑道上。
⽐赛跑道表⾯为⽩⾊,中⼼有连续⿊线作为引导线,⿊线宽 25cm。
⽐赛规则限定可赛道宽度和拐弯最⼩半径等参数,赛道具体形状在⽐赛当天现场公布。
控制器⾃主识别引导线并控制模型车沿着赛道运⾏。
在严格遵守规则中对于电路限制条件,保证智能车可靠运⾏前提下,电路设计尽量简洁紧凑,以减轻系统负载,提⾼智能车的灵活性,同时坚持充分发挥创新原则,以简洁但功能完美为出发点,并以稳定性为⾸要前提,实现智能车快速运⾏。
基于MFC的飞思卡尔智能车上位机设计
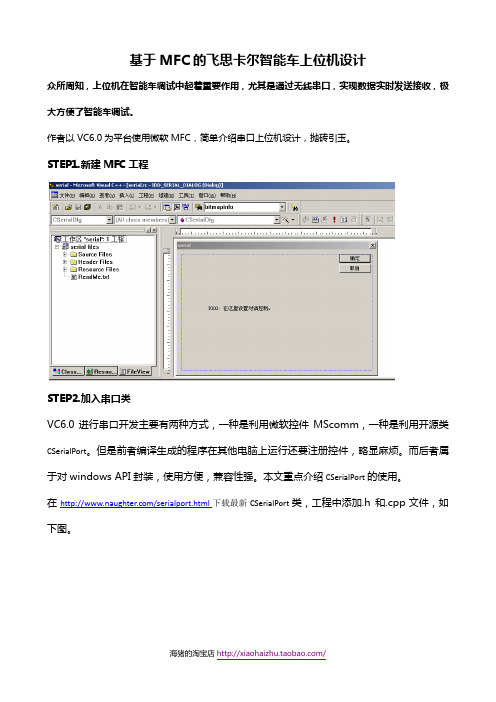
基于MFC的飞思卡尔智能车上位机设计众所周知,上位机在智能车调试中起着重要作用,尤其是通过无线串口,实现数据实时发送接收,极大方便了智能车调试。
作者以VC6.0为平台使用微软MFC,简单介绍串口上位机设计,抛砖引玉。
STEP1.新建MFC工程STEP2.加入串口类VC6.0进行串口开发主要有两种方式,一种是利用微软控件MScomm,一种是利用开源类CSerialPort。
但是前者编译生成的程序在其他电脑上运行还要注册控件,略显麻烦。
而后者属于对windows API封装,使用方便,兼容性强。
本文重点介绍CSerialPort的使用。
在/serialport.html下载最新CSerialPort类,工程中添加.h 和.cpp文件,如下图。
在serialDlg.cpp和serialDlg.h中包含Cserialport头文件同时在serialDlg.h中定义对象CSerialPort m_SerialPort; //CSerailPort类对象STEP3. Cserialport必备函数STEP4.窗口布局设置成员变量(Ctrl+W ),四个编辑框对应四个UNIT成员变量STEP5.串口初始化OK,所有前期工作准备完成,开始串口操作按钮“打开串口”,双击,创建消息函数void CSerialDlg::OnOpenserial() 实现串口初始化,代码如下按钮“关闭串口”,双击,创建消息函数void CSerialDlg::OnCloseserial() 函数功能为进行串口初始化,代码如下STEP6.串口数据发送按钮“发送”,双击,创建消息函数,代码如下STEP7.串口数据接收手工建立WM_COMM_RXCHAR的消息映射处理函数OnComm() 首先在serialDlg.h中添加响应函数声明在serialDlg.cpp中添加消息响应At last,VC串口通讯程序基本功能,打开串口,关闭串口,接收数据,发送数据均以完成。
飞思卡尔智能车摄像头组技术报告 (2)
第十届“飞思卡尔”杯全国大学生智能汽车竞赛技术报告摘要本文设计的智能车系统以K60微控制器为核心控制单元,基于CCD摄像头的图像采样获取赛道图像信息,提取赛道中心线,计算出小车与黑线间的位置偏差,采用PD方式对舵机转向进行反馈控制。
使用PID控制算法调节驱动电机的转速,结合特定算法分析出前方赛道信息实现对模型车运动速度的闭环控制。
为了提高模型车的速度和稳定性,我们用C++开发了仿真平台、蓝牙串口模块、SD卡模块、键盘液晶模块等调试工具,通过一系列的调试,证明该系统设计方案是确实可行的。
关键词:K60,CCD摄像头,二值化,PID控制,C++仿真,SD卡AbstractIn this paper, we will design a intelligent vehicle system based on MC56F8366 as the micro-controller unit. using the CCD image sensor sampling to the track image information to extract the track line center, to calculate the positional deviation between the car with the black line, the use of PD on the rudder. The machine turned to the feedback control. We use PID control algorithm to adjust the speed of the drive motor, combined with specific algorithms to achieve closed-loop control of the movement speed of the model car in front of the track. In order to improve the speed and stability of the model car, we use the C++ to develop a simulation platform, Bluetooth serial module, SD card module, keyboard, LCD modules, debugging tools. Through a series of debugging, the system design is feasible.Key words: K60,CCD_camera, binaryzation, PID control, C++ simulation, SD card目录第1章引言................................................................................... - 1 - 第2章系统总体设计................................................................ - 2 - 2.1 系统分析..................................................................................... - 2 - 2.2 车模整体布局............................................................................. - 3 - 2.3 本章小结....................................................................................... - 4 - 第3章系统机械设计及实现................................................... - 5 - 3.1 前轮定位的调整......................................................................... - 5 -3.1.1主销内倾..............................................................................- 6 -3.1.2 后倾角.................................................................................- 6 -3.1.3 内倾角.................................................................................- 7 - 3.2 舵机安装....................................................................................... - 8 -3.2.1 左右不对称问题的发现与解决........................................- 10 - 3.3 编码器的安装............................................................................ - 10 - 3.4 摄像头安装.................................................................................- 11 -3.4.1 偏振镜的使用......................................................................- 12 -3.4.2 摄像头的标定......................................................................- 12 - 3.5 摄像头的选用.............................................................................- 13 - 3.6 红外接收装置.............................................................................- 14 -3.7 防止静电复位.............................................................................- 15 - 3.8 本章小结.......................................................................................- 15 - 第4章硬件电路系统设计及实现 ...................................... - 16 -4.1 硬件设计方案............................................................................- 16 - 4.2 电源稳压......................................................................................- 17 - 4.3 电机驱动......................................................................................- 18 - 4.4 图像处理部分............................................................................- 19 -4.4.1 摄像头升压电路.............................................................- 19 -4.4.2 视频分离电路.................................................................- 19 -4.4.3 硬件二值化.....................................................................- 19 - 4.5 灯塔电路......................................................................................- 21 - 4.6 本章小结......................................................................................- 21 -第5章系统软件设计.............................................................. - 22 -5.1 软件流程图...............................................................................- 22 - 5.2 算法新思路...............................................................................- 23 -5.2.1中心线提取.......................................................................- 23 -5.2.2 直角检测........................................................................... - 24 -5.2.3 单线检测......................................................................... - 24 - 5.3 舵机控制.....................................................................................- 25 - 5.4 速度控制.....................................................................................- 26 - 5.5 PID算法....................................................................................- 26 - 5.6 路径优化.....................................................................................- 31 -第6章系统联调...................................................................... - 33 - 6.1 开发工具.................................................................................... - 33 - 6.2 无线调试蓝牙模块及蓝牙上位机..........................................- 33 - 6.3 键盘加液晶调试......................................................................- 34 - 6.4 TF卡调试模块.........................................................................- 34 -6.4.1 TF卡.............................................................................- 34-6.4.2 SDCH卡 .........................................................................- 35 -6.4.3 软件实现.......................................................................- 36 - 6.5 C++上位机设计........................................................................- 36 - 6.6 电源放电模块...........................................................................- 38-6.6.1 镍镉电池记忆效应…………………………………….. - 39-6.6.2 放电及电池性能检测设备…………………………….. - 39- 6.7 本章小结....................................................................................- 40 - 第7章模型车技术参数........................................................ - 41 - 第8章总结............................................................................... - 42 - 参考文献...................................................................................... - 44 -第1章引言在半导体技术日渐发展的今天,电子技术在汽车中的应用越来广泛,汽车智能化已成为行业发展的必然趋势。
飞思卡尔智能车设计方法探讨
优 点就 是 无论 制 臂 状 态 如 何 , 桥 都 不会 出 现 “ H 共
态 导通 ” 短路 ) ( 。电路 图如 2所示 。
GD N
图 2 H 桥 电 路
圈 3 MC 3 8 芯 片 驱 动 电路 386
采用 C MO S管 搭 建 H 桥 , 特 点 是 内阻 小 , 其 驱
1 6 / n 工 作 效 率 最 大 。通 过 电 机 驱Байду номын сангаас动 模 块 40 0rmi, 控 制 电机 两端 电压 , 以使模 型车 加速运 行 , 可 也可对 模 型车进 行制 动 。可 以使 用 大功 率 晶体 管 、 桥 或 全
者半桥 电路 , 出 P 输 WM 波形 实现 对 电机 的控 制 。 通过 查阅 大 量 资 料 , 目前 主 流 R 3 0S 直 流 S 8一T
Q 4关 闭 , 电机 两 端均 为高 电平 , 电机 不转 ; 当控 制臂
要 电机 双 向旋 转控 制 , 需要 另一 片 B S 9 O共 同 则 T 76 组成 全桥 。图 为采 用 B 7 6 TS 9 0驱 动 芯 片 的 电路 如
图 4所 示 。
1 2均 为高 电平 时 , 、 、 Ql Q2关 闭 , 3 Q4导 通 , Q 、 电机 两 端均 为低 电平 , 机 也不 转 , 以 , 电路 有 一个 电 所 此
图 1 系统 结构 框 图
1 智 能 车整 体 设 计
系统 采 用 飞思 卡 尔半 导 体 公 司的 1 6位微 处理
2 驱 动 电路设 计
直 流 电机 的性 能受 驱 动 电路 的好 坏 影 响 , 的 好
驱 动 电路 可 以充 分发 挥 直 流 电机 的 性 能 , 而 为整 从 个智 能 车提供一个 性能 优越 的动力 系统 。飞思 卡尔
飞思卡尔智能车电磁组分区算法介绍
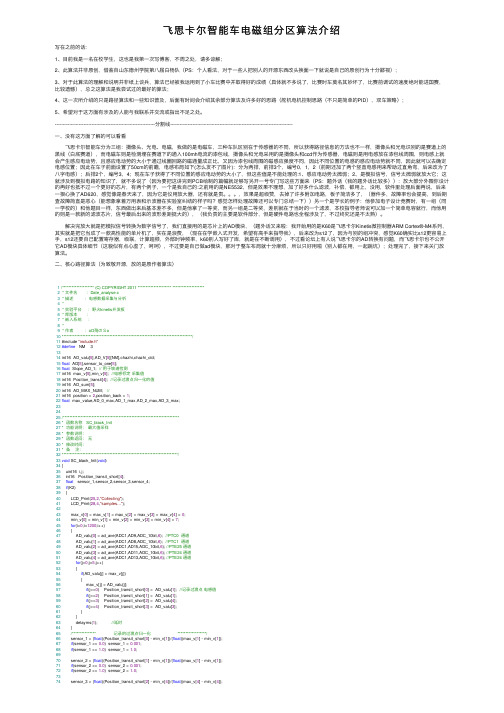
飞思卡尔智能车电磁组分区算法介绍写在之前的话:1、⽬前我是⼀名在校学⽣,这也是我第⼀次写博客,不周之处,请多谅解;2、此算法并⾮原创,借鉴⾃⼭东德州学院第⼋届⽩杨队(PS:个⼈看法,对于⼀些⼈把别⼈的开源东西改头换⾯⼀下就说是⾃⼰的原创⾏为⼗分鄙视);3、对于此算法的理解和说明并⾮纸上谈兵,算法已经被我运⽤到了⼩车⽐赛中并取得好的成绩(具体就不多说了,⽐赛时车莫名其妙坏了,⽐赛前调试的速度绝对能进国赛,⽐较遗憾),总之这算法是我尝试过的最好的算法;4、这⼀次所介绍的只是路径算法和⼀些知识普及,后⾯有时间会介绍其余部分算法及许多好的思路(舵机电机控制思路(不只是简单的PID),双车策略);5、希望对于这⽅⾯有涉及的⼈能与我联系并交流或指出不⾜之处。
---------------------------------------------------------------分割线-----------------------------------------------------------------------------⼀、没有这⽅⾯了解的可以看看 飞思卡尔智能车分为三组:摄像头、光电、电磁,我做的是电磁车,三种车队区别在于传感器的不同,所以获得路径信息的⽅法也不⼀样,摄像头和光电识别的是赛道上的⿊线(⽩底赛道),⽽电磁车则是检测埋在赛道下的通⼊100mh电流的漆包线,摄像头和光电采⽤的是摄像头和ccd作为传感器,电磁则是⽤电感放在漆包线周围,则电感上就会产⽣感应电动势,且感应电动势的⼤⼩于通过线圈回路的磁通量成正⽐,⼜因为漆包线周围的磁感应强度不同,因此不同位置的电感的感应电动势就不同,因此就可以去确定电感位置;因此在车⼦前⾯设置了50cm的前瞻,电感布局如下(怎么发不了图⽚):分为两排,前排3个,编号0,1,2(前期还加了两个竖直电感⽤来帮助过直⾓弯,后来改为了⼋字电感);后排2个,编号3,4;现在车⼦获得了不同位置的感应电动势的⼤⼩了,但这些值是不能处理的:1、感应电动势太微弱;2、是模拟信号,信号太微弱就放⼤它;这就涉及到模拟电路的知识了,就不多说了(因为要把这讲完到PCB绘制的篇幅就⾜够写另开⼀号专门写这些⽅⾯来(PS:题外话(我的题外话⽐较多)):放⼤部分外围你设计的再好也抵不过⼀个更好的芯⽚,有两个例⼦,⼀个是我⾃⼰的:之前⽤的是NE5532,但是效果不理想,加了好多什么滤波,补偿,都⽤上,没⽤,软件⾥处理后⾯再说,后来⼀狠⼼换了AD620,感觉像是春天来了,因为它是仪⽤放⼤器,还有就是贵。
飞思卡尔智能车原理
飞思卡尔智能车原理飞思卡尔智能车是一种基于嵌入式系统和人工智能技术的智能交通工具。
它通过搭载各种传感器、控制器和算法,在无人驾驶、自动泊车等场景下发挥重要作用。
本文将介绍飞思卡尔智能车的原理,并分析其在实际应用中的优势和挑战。
一、飞思卡尔智能车的硬件组成飞思卡尔智能车的硬件组成主要包括以下几个方面:1. 主控单元:主控单元是飞思卡尔智能车的核心组件,通常采用高性能的嵌入式处理器。
它负责接收来自各种传感器的信息,并根据预设的算法进行数据处理和决策。
2. 传感器:飞思卡尔智能车搭载多种传感器,如摄像头、激光雷达、超声波传感器等。
这些传感器可以实时感知周围环境的信息,包括道路状况、障碍物位置等,为智能车提供必要的数据支持。
3. 电机与驱动系统:飞思卡尔智能车搭载电机和对应的驱动系统,用于控制车辆的行驶和转向。
这些系统通常采用先进的电子控制技术,能够实现精确的转向和速度控制。
4. 通信模块:飞思卡尔智能车通过通信模块与其他车辆、交通基础设施等进行信息交互。
这种通信方式可以实现车辆之间的协同工作,提高交通系统的整体效率。
二、飞思卡尔智能车的工作原理飞思卡尔智能车的工作原理可以归结为以下几个关键步骤:1. 环境感知:飞思卡尔智能车通过搭载的传感器对周围环境进行感知。
摄像头可以捕捉到道路状况、交通标志和其他车辆的信息;激光雷达可以检测到障碍物的位置和距离;超声波传感器可以测量车辆与前方障碍物的距离等。
通过这些传感器获取到的数据,智能车可以对周围环境做出准确判断。
2. 数据处理与决策:主控单元接收传感器传来的数据,并根据预设的算法进行数据处理和决策。
它会将传感器的信息与事先建立的模型进行比对,进而判断车辆应该采取何种动作,如加速、刹车、转向等。
3. 控制指令生成:基于数据处理与决策的结果,主控单元生成相应的控制指令,通过驱动系统控制车辆的行驶和转向。
这些控制指令可以通过电机和驱动系统精确地控制车辆的运动。
4. 数据通信与协同:飞思卡尔智能车通过通信模块与其他车辆以及交通基础设施进行信息交互。
聊城大学飞思卡尔智能车
聊城大学“飞思卡尔”智能车
简介:
“飞思卡尔”智能车是采用飞思卡尔半导体公司的8位、16位、32位MCU作为微控制器,按照官方要求的车体尺寸、零部件(舵机,马达、传感器等)、技术规范,利用学生们的自动控制、模式识别、传感技术、电子、电气、计算机、机械与汽车等专业学科方面的知识,并发挥学生的创新能力制作而成的智能车。
其基本类型有光电组,摄像组以及磁导航组三种,每组都有自己的特色的机械结构及跑道,可以充分满足学生的兴趣爱好。
赛事:
全国大学生“飞思卡尔”杯智能车大赛是以智能汽车为研究对象的创意性科技竞赛,是面向全国大学生的一种具有探索性工程实践活动,是教育部倡导的大学生科技竞赛之一。
该竞赛以“立足培养,重在参与,鼓励探索,追求卓越”为指导思想,旨在促进高等学校素质教育,培养大学生的综合知识运用能力、基本工程实践能力和创新意识,激发大学生从事科学研究与探索的兴趣和潜能,倡导理论联系实际、求真务实的学风和团队协作的人文精神,为优秀人才的脱颖而出创造条件。
参赛情况:
聊城大学飞思卡尔智能车研发团队今年第一次参加全国大学生“飞思卡尔”智能车竞赛,在没有经验积累、很多专业知识和技能零起步的情况下,短短两个月的时间内完成了三辆光电组智能车、两辆电磁组直立行走智能车的设计与改装工作,并且能够稳定运行。
聊城大学“飞思卡尔”团队一定会再接再厉不断创造更加辉煌的成绩。
飞思卡尔
光电组、摄像头组、 光电组、摄像头组、电磁组简介
霍尔开关元件: 霍尔开关元件: 霍尔传感器是基于霍尔效应原理,将电流、 霍尔传感器是基于霍尔效应原理,将电流、 磁场、位移、压力、 磁场、位移、压力、压差转速等被测量转换 成电动势输出的一种传感器。虽然转换率低、 成电动势输出的一种传感器。虽然转换率低、 温度影响大、 温度影响大、要求转换精度较高时必须进行 温度补偿,但霍尔传感器具有结构简单、 温度补偿,但霍尔传感器具有结构简单、体 积小、坚固、频率响应宽(从直流到微波)、 积小、坚固、频率响应宽(从直流到微波)、 动态范围(输出电动势的变化) 无触点、 动态范围(输出电动势的变化)大、无触点、 寿命长、可靠性高, 寿命长、可靠性高,以及易于微型化和集成 电路化等优点。 电路化等优点。
光电组、摄像头组、 光电组、摄像头组、电磁组简介
理论上可以用密 绕的线圈作为传感器 去测量通电直导线的 磁场。 磁场。 实际上要用LC并联 实际上要用LC并联 LC 谐振电路放大感应电压, 谐振电路放大感应电压, 并且由于LC LC回路的选频 并且由于LC回路的选频 特性, 特性,可以去除一些噪 声。
‘飞思卡尔’智能车简介
大赛要求使用统一指定的竞赛 车模套件, 车模套件,采用飞思卡尔公司的 位微控制器MC9S12XS128 MC9S12XS128作为 16 位微控制器MC9S12XS128作为 核心控制单元, 核心控制单元,自主构思控制方 案进行系统设计, 案进行系统设计,包括传感器信 号采集处理、动力电机驱动、 号采集处理、动力电机驱动、转 向舵机控制以及控制算法等, 向舵机控制以及控制算法等,完 成智能车工程制作及调试。 成智能车工程制作及调试。
‘飞思卡尔’智能车简介
大赛组委会统一规定了车模和赛道标准, 大赛组委会统一规定了车模和赛道标准, 并且主要以速度为评判标准: 并且主要以速度为评判标准:
freescale智能车技术报告
第三届“飞思卡尔”杯全国大学生智能汽车邀请赛技术报告附件A程序源代码附件B模糊算法在智能车控制中的应用学校:中国民航大学队伍名称:航大一队参赛队员:贾翔宇李科伟杨明带队教师:丁芳孙毅刚关于技术报告和研究论文使用授权的说明本人完全了解第三届“飞思卡尔”杯全国大学生智能汽车邀请赛关保留、使用技术报告和研究论文的规定,即:参赛作品著作权归参赛者本人,比赛组委会和飞思卡尔半导体公司可以在相关主页上收录并公开参赛作品的设计方案、技术报告以及参赛模型车的视频、图像资料,并将相关内容编纂收录在组委会出版论文集中。
参赛队员签名:带队教师签名:日期:目录第一章引言 (1)第二章智能车设计制作思路以及实现方案概要 (2)第三章硬件电路设计 (4)3.1 黑线检测电路 (4)3.2系统电路 (4)3.2.1 单片机最小系统 (5)3.2.2 接口电路 (5)3.2.3 调试电路 (5)3.2.4 电源电路 (5)3.3电机驱动电路 (6)3.4 测速电路 (6)第四章机械改造及电路板设计安装 (7)4.1 机械部分安装及改造 (7)4.1.1 舵机的改造 (7)4.1.2 前轮定位 (7)4.2 传感器的设计及安装 (7)4.2.1 黑线检测传感器 (7)4.2.2 测速传感器 (8)4.3 电机驱动电路板的设计及安装 (8)4.4 系统电路板的固定及连接 (9)4.5 整体结构总装 (9)第五章微处理器控制软件主要理论、算法说明及代码介绍 (10)5.1模糊控制原理 (10)5.2 控制算法说明 (10)5.3 程序代码介绍 (11)5.4 数字滤波器设计 (13)5.4.1传感器基准值初始化滤波器设计 (13)5.4.2行驶过程中采样信号滤波器设计 (13)第六章安装调试过程 (15)第七章EEPROM辅助调试 (16)7.1 EEPROM概述 (16)7.2 EEPROM擦除和编程步骤 (16)7.3 EEPROM编程命令字及其含义 (17)7.4 EEPROM使用中可能遇到的问题进行说明 (17)7.4.1如何修改ROM/RAM/EEPROM的地址 (17)7.4.2 如何将EEPROM中的数据读出 (18)第八章模型车主要技术参数说明 (19)第九章总结 (20)1第一章引言全国大学生飞思卡尔杯智能汽车竞赛已经成功举办过两届了,智能汽车的速度越来越快,技术也越来越高。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
创新方法结课方案设计
组长:江兵10212008 组员:郭文丽 10212003
马小艳10211074
赵鹏飞11212026
次仁群培11231235
刘铁旭11231218
飞思卡尔智能车设计与实现
——创新方法课题方案设计
一、选题理由与目标
首先创新方法课教授我们创新方法方式及思路,并且这次课题设计的要求如下:方案设计要求具有独创性、新颖性和可行性。
曾经参加过诸如微联杯、物理实验竞赛等科技类的竞赛,做过一些实用的作品,觉得凭空想象个方案而没有机会验证方案的好坏难以检验自己的创新方案优劣。
所以恰巧这学期我在参加飞思卡尔智能车竞赛,可以很好地运用课堂知识想出创新方案并且在智能车上实验验证。
打算带领组员针对飞思卡尔智能车进行创新。
最终在我校举办的第一届飞思卡尔智能车校内赛上我取得了一等奖的好成绩,将在暑假参加华北赛区的比赛。
二、飞思卡尔智能车竞赛介绍
我参加的摄像头组,比赛规则是小车上安装摄像头传感器,拍摄小车前方画面,使用飞思卡尔单片机进行跑道识别并控制小车沿着跑道前进,速度快者取胜。
下图为赛道和我们的车,摄于学生活动中心706。
三、本小组针对智能车创新处概述
在上创新方法课期间,我一直在从事着飞思卡尔智能车的制作,也就是参加我们学校举办的第一届飞思卡尔智能车校内赛。
在制作过程沿用了部分上届的方案,也遇到了很多麻烦,并且,如果想要超过老队员取得更好的成绩就必须创新,突破思维定式。
下面我挑选主要的创新处阐述一下,第一个事舵机的摆放方式,舵机的摆放方式不同会影响的车拐弯的灵敏度和车的重心,如果车速非常快的时候影响就会比较大,过去都是把舵机横放,这样的缺点是舵机的反应速度会比较慢,经过设计与计算我们采用的新的摆放舵机方式如下,这样做的优点是第一舵机反应速度快,车轮拐30度对应舵机所摆度数相比较原来的方案会小很多,加快了舵机的反应速度。
第二点主要的创新处是摄像头的安装方式,摄像头的安装方式可变的地方主要是摄像头相对于整车的位置,可以安放在车电池的前面,也可以安装在车电池的后面甚至是最后面,另外摄像头的高度也有很多讲究。
最后经过深入的思考与实验,我们改变了往届学长摄像头安装比较靠前以及摄像头非常高的弊病,这样做会照成摄像头拍摄图像在离车近处盲区非常大,另外摄像头过高会照成重心高抖动厉害,但是摄像头低又会照成前瞻近,图像畸变大,这时我们在程序中经行创新,得到了改善,将在第四节具体介绍。
第三点主要创新处是图像的采集部分,当摄像头拍摄后输出模拟信号,怎么样从这模拟信号中提取自己需要的数据就很重要,往年的赛道是单线赛道,只有一条黑线,摄像头主要采用硬件二值化方式提取黑线,对于单黑线赛道很适用,但是改为双黑线赛道后这种方法弊端就非常大,所以怎样改变呢?我们创新性地并去提取黑线的思路,改为提取中间白色区域,使得问题迎刃而解,为我们提速创造了有力条件。
具体实施方案将在第四节介绍。
四、智能车创新细节
(1)舵机安装方式
舵机改装前的安装方式如图:
舵机改装后的安装方式如图:
舵机的安装方式非常影响到智能车的重心,智能车的重心在安装舵机前比较靠后,所以舵机的安装应当尽量靠前,并且这样可以为主板节约一定的空间。
另外舵机的摆放方式会影响到小车拐弯的速度,也就是当单片机命令小车拐弯时,小车的轮子需要多长时间响应,当小车速度非常快时就需要非常快的响应速度,那么响应速度取决于什么呢?主要取决
于舵机的响应速度和舵机更够给出的力,这里有涉及到力臂的问题,原来的舵机摆放方式左右力臂时不等的,转弯会有不对称现象,左右拐弯的力也不对称,对于调车产生了非常大的限制。
改进后的舵机摆放方式首先在重心方面具有非常大的优势,另外,左右力臂相等,力臂较短,力度大,具有很大的优势。
(2)摄像头安装方式及高度
摄像头改装前的安装方式:
摄像头改装后的安装方式:
摄像头安装准则是越低越好,因为这样可以降低整个车的重心,防止拐弯时外侧车轮失去抓地力。
另一方面降低摄像头的高度可以减少抖动,保证采集图像的准确性。
根据这两个准则,那么摄像头的安装是不是越低越好呢?其实也不是,摄像头安装比较低时会带来很多弊端如下:第一图形畸变更加严重,第二易受周围光线的影响,产生聚光和反光,聚光是由于摄像头拍摄的图像之外的光线也聚到镜头上影响摄像头的采集。
第三降低摄像头后为了能够看到同样远的距离势必要上扬摄像头,这样会使得摄像头拍摄得过远,远处的图像无法处理浪费资源。
那么怎样既降低了摄像头有解决了这些制约降低摄像头的矛盾因素呢?
首先当我们降低摄像头后,各种制约因素开始出现,后面我们在采集和识别上进行了一定的创新解决了制约因素,使得我们的小车摄像头降得非常低,采集效果也非常好。
降低摄像头后首先遇到的困难就是图形畸变非常大,实际中两条平行线构成的矩形拍摄后出来的图像显示是个梯形,并且梯形中间还往里面陷,这是由于梯形失真和桶形失真造成的,这样以来摄像头拍摄的双线跑到全成双曲线了,图像识别难度加大很多。
那么我们怎样识别这种畸变的图像呢?
图像畸变后会发现无论我们拍摄的双平行线失真非常严重,但是我们拍摄的正中央的黑线依旧是条直线,失真比较小,那么我们为何不变向思维放弃对双黑线分别识别,而是将其每行都去中值识别它们的中间线呢?这样识别就可以越过图像畸变的障碍。
其次拍摄的距离过远以及聚光影响,我们进行了多次创新性实验,最终采取了控制采样行的策略,摄像头一幅画是三百行,我们一般只取其中的一百行用,那么怎样去这一百行可以好好地做文章,以前都是对这三百行等距取样,现在前面的图像不具备使用价值,所以我们采取了放弃远处的一百行,仅使用近处一百行的策略。
而聚光最容易影响的就是较远处的图像,所以我们放弃的后一百行图像也是聚光容易干扰的图像,这样以来两个问题都可以一次性解决了。
(3)摄像头模拟信号处理
摄像头拍摄到画面中我们会很明显地看到两条黑线,第一条思路自然是识别这两条黑线,但是,双黑线跑道这两条黑线在远处会显得特别特别细以至于难以分辨,这样以来误识别的概率大大增加,并且,现用的硬件二值化模拟信号处理方式对于双黑线的采集苦难重重。
那么怎样稳定有效地提取图像中两条黑线包含的信息呢?
这起初成为我们提速的一大瓶颈,采集不稳定前瞻太近会导致速度一快小车就冲出跑道。
后来,我们发现,两条黑线间的白色区域占整幅图面积非常广,为何不采集中间白色跑道的信息?我们依照采集黑线的原理成功采集到了中间白色跑道的信息,中间白色区域在视野很远的地方才会变得很细,所以小车前瞻大大增加。
五、创新方法课程的上课感受、收获与建议
在创新方法这一学期的课上,我们学习到了基本的创新实践方法与思路,这对于我在智能车的制作中产生了非常大的帮助,很多创新方式都是在创新方法这门课教授的方法下诱发出来的。
并且,这门课教授了我们很多工业商业方面的知识,有工业布局分工,市场营销方式,讲了生活中无处不在的创新,给我们很大的启发,激发我们对于生活中各个方面的创新激情。
在课后本组成员一起协助我制作智能车的过程中,很多好的思路在大家的讨论中产生,每一个好的创新方法都是通过非常多次的实践最终确定的,很多想法觉得很合理但是在实践中会发现有非常大的问题,无法采纳。
创新一定要联系实际,不能够凭空想象,创新的方法必须放到实践中去检验,去优化。
创新方法课程可以结合一些比赛来上,比如创新方法课程开课后会有全国大学生节能减排科技大赛,创新方法课程可以以此为依托,让同学们运用课堂上的知识来参与到这项比赛中,在实践中应用课堂
学习的理论知识。
另外,课堂内可以举办些比如方案设计竞赛的形式来激励大家参与到课余实践中,更好地掌握课堂学习到得创新方法。