机械原理课程设计大作业平面六杆机构
平面六杆机构课程设计
平面六杆机构课程设计一、课程目标知识目标:1. 让学生掌握平面六杆机构的基本构成和特点,理解其运动规律和动力学特性。
2. 使学生了解平面六杆机构在实际工程中的应用,并能结合具体案例进行分析。
3. 帮助学生理解平面六杆机构与其他类型机构之间的区别与联系。
技能目标:1. 培养学生运用平面六杆机构进行简单机构设计的能力,能够根据实际需求进行参数优化。
2. 提高学生运用计算机软件(如CAD等)进行平面六杆机构运动仿真和分析的能力。
3. 培养学生运用数学工具对平面六杆机构进行运动学和动力学计算的能力。
情感态度价值观目标:1. 培养学生对机械设计学科的兴趣和热情,激发其创新意识和探索精神。
2. 培养学生具备良好的团队合作精神和沟通能力,使其在项目实践中能够相互协作、共同进步。
3. 引导学生关注我国机械工程技术的发展,培养其爱国情怀和社会责任感。
本课程针对高年级学生,结合学科特点和教学要求,将目标分解为具体的学习成果,以使学生能够在实际操作中掌握平面六杆机构的相关知识,提高综合运用能力。
在教学过程中,注重理论联系实际,充分调动学生的主观能动性,培养其创新意识和实践能力。
通过本课程的学习,使学生能够为今后的机械设计工作打下坚实基础。
二、教学内容1. 平面六杆机构基本概念:介绍平面六杆机构的定义、分类及其应用场景,对应教材第二章第一节。
- 六杆机构的构成与特点- 六杆机构的运动副类型及功能2. 平面六杆机构运动分析:- 分析平面六杆机构的运动规律,对应教材第二章第二节;- 掌握平面六杆机构的自由度和速度、加速度的计算方法。
3. 平面六杆机构动力学分析:- 动力学基本方程及其应用,对应教材第二章第三节;- 力、力矩和功率的计算方法。
4. 平面六杆机构设计方法:- 介绍平面六杆机构设计的基本原则和步骤,对应教材第二章第四节;- 结合实际案例,进行参数设计和优化。
5. 计算机辅助设计与分析:- 利用CAD软件进行平面六杆机构建模和运动仿真,对应教材第二章第五节;- 学会对仿真结果进行分析和优化。
平面六杆机构的运动分析
平面六杆机构的运动分析(题号3-C)指导老师陈永琴班级041011学号04101042姓名师汉同组人戴峰杨彤王建雄1、题目说明下图为一平面六杆机构。
直各构件的尺寸如下表,又知原动件1以角速度为1rad/s沿逆时针方向回转,要求个从动件的角位移、角速度、及角加速度以及E 点的位移、速度及加速度变化情况。
组号L i L2 L2'L3 L4 L5 1_6 a(X G)L4'(Y G)L73-C600题目要求:三人一组计算出原动件从0到2口变化时(计算点数37)所要求的各运动变量的大小, 并绘出运动曲线图及E点的轨迹曲线。
2、题目分析1) 建立封闭图形:L 2-L 3= L 4 - L iL 2 + L 2' + L 5 - L 6+ L 7= L 4' - L i2)机构运动分析A.角位移分析由图形封闭性得:L ? cos 2 L 3 cos 3 L 4 L i cos 1L 2 sin2L 3 sin3L 1 sin 1L 2 cos 2 L 2' cos 2 a2L 5co s 5 L 6cos6L 4' L 1 cos1 L2 sin 2 L 2'sin 2a2L5sin5L6 sin 6L 7L 1 sin 1B.角速度分析上式对时间求一阶导数,可得速度方程L 2 sin22 L3 sin 3 3 L 1 sin 1 1L 2 cos 22 L3 cos 33 L [ cos 11L 2 sin 2 12 L 2 sin(a 2)2L 5 sin5 5 L6 sin 66L1sin 1 1 L 2 cos 221 L2 cos( 2 )2 L 5 cos 5 5L 6 cos 6 6L 1cos 11化为矩阵形式为:L2sin 2 L 3 sin 3 0 0 2L 2cos 2 L 3 cos 30 0 3 L 2 sin2 L 2' sin a 2 0 L 5 sin 5 L e sin 6 5 L 2 cos2L 2 cos a 2L 5 cos 5L 6 cos 66L 1 sin 1 L 〔 cos iiL 1 sin 1 L i cos iC.角加速度分析:角速度矩阵对时间求一阶导数,可得加速度矩阵为:L 2 sin 2 L asin 30 2L 2 cos 2L 3 cos 30 3L :2 sin 2L 2' sin a 20 L 5 sin 5 L 6 sin 6 5L 2cos 2 L 2' cos a 2L 5 cos 5L 6 cos 66L 2 cos 2 L 3 cos 30 22 L i cos 1L 2 sin 2L 3 sin 30 2 3 2Li sin iL 2 cos 2 L 2' cos a 20 L ; 5 cos 5 L 6 cos 6 2 5 1L i cos iL 2 sin 2 L 2' sin a 2L5sin 5L 6 sin 62 6L i siniD.E 点的运动状态XEXGL6COs6L5COs5v EX Lsin 66 L5 sin 5 5 速度: v EEyL 6cos 6 6L5cos 55位移:y y L 6 sin 6L 5 sin 5调用MATLAB 系统函数fsolve 求解各从动件的角位移分别存 至 th2,th3,th5,th6。
机械原理课程设计六杆机构运动与动力分析
机械原理课程设计六杆机构运动与动⼒分析⽬录第⼀部分:六杆机构运动与动⼒分析⼀.机构分析分析类题⽬ 3 1分析题⽬ 32.分析内容 3 ⼆.分析过程 4 1机构的结构分析 42.平⾯连杆机构运动分析和动态静⼒分析 53机构的运动分析8 4机构的动态静⼒分析18 三.参考⽂献21第⼆部分:齿轮传动设计⼀、设计题⽬22⼆、全部原始数据22三、设计⽅法及原理221传动的类型及选择22 2变位因数的选择22四、设计及计算过程241.选取两轮齿数242传动⽐要求24 3变位因数选择244.计算⼏何尺⼨25 五.齿轮参数列表26 六.计算结果分析说明28 七.参考⽂献28第三部分:体会⼼得29⼀.机构分析类题⽬3(⽅案三)1.分析题⽬对如图1所⽰六杆机构进⾏运动与动⼒分析。
各构件长度、构件3、4绕质⼼的转动惯量如表1所⽰,构件1的转动惯量忽略不计。
构件1、3、4、5的质量G1、G3、G4、G5,作⽤在构件5上的阻⼒P⼯作、P空程,不均匀系数δ的已知数值如表2所⽰。
构件3、4的质⼼位置在杆长中点处。
2.分析内容(1)对机构进⾏结构分析;(2)绘制滑块F的运动线图(即位移、速度和加速度线图);(3)绘制构件3⾓速度和⾓加速度线图(即⾓位移、⾓速度和⾓加速度线图);(4)各运动副中的反⼒;(5)加在原动件1上的平衡⼒矩;(6)确定安装在轴A上的飞轮转动惯量。
图1 六杆机构⼆.分析过程:通过CAD制图软件制作的六杆机构运动简图:图2 六杆机构CAD所做的图是严格按照题所给数据进⾏绘制的。
并机构运动简图中活动构件的序号从1开始标注,机架的构件序号为0。
每个运动副处标注⼀个字母,该字母既表⽰运动副,也表⽰运动副所在位置的点,在同⼀点处有多个运动副,如复合铰链处或某点处既有转动副⼜有移动副时,仍只⽤⼀个字母标注。
见附图2所⽰。
1.机构的结构分析如附图1所⽰,建⽴直⾓坐标系。
机构中活动构件为1、2、3、4、5,即活动构件数n=5。
机械原理课程设计六杆机构运动分析
机械原理课程设计说明书题目六杆机构运动分析学院工程机械学院专业机械设计制造及其自动化班级机制三班设计者秦湖指导老师陈世斌2014年1月15日目录一、题目说明∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙ 21、题目要求∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙ 32、原理图∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙ 33、原始数据∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙ 3二、结构分析∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙ 4三、运动分析∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙ 51、D点运动分析∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙ 82、构件3运动分析∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙93、构件4运动分析∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙94、点S4运动分析∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙10四、结论∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙10五、心得体会∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙10六、参考文献∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙11一、题目说明1、题目要求此次机械原理课程设计是连杆机构综合,通过对其分析,选择合适的机构的尺寸大小,并进行下列操作:⑴对机构进行结构分析;⑵绘制滑块D的运动线图(即位移、速度和加速度线图);⑶绘制构件3和4的运动线图(即角位移、角速度和角加速度线图);⑷绘制S4点的运动轨迹。
六杆机构—机械原理课程设计
一、题目:计算平面连杆机构的运动学分析 (2)二、平面连杆机构的运动分析方程 (2)三、程序流程图 (5)四、计算源程序 (6)五、计算结果数据 (12)六、运动线图及分析 (238)七、体会及建议 (337)八、参考书 (337)一、题目:计算平面连杆机构的运动学分析1,图a 所示的为一平面六杆机构。
假设已知各构件的尺寸如表1所示,原动件1以等角速度ω1=1rad/s 沿着逆时针方向回转,试求各从动杆件的角位移、角速度和角加速度以及E 点的位移、速度和加速度的变化情况。
a)表1 平面六杆机构的尺寸参数(单位:mm)二、平面连杆机构的运动分析方程1)位置分析建立封闭矢量多边形l 1+l 2= l 4+l 3 (即AB+BC=AD+DC )l 1+l 2+ l 2’= AG+l 5+l 6 (即AB+BC+CE =AG+GF+FE ) (式1)将机构的封闭矢量方程式(1)写成在两坐标上的投影式:1*cos 12*cos 243*cos 31*sin 12*sin 23*sin 31*cos 12*cos 22'*cos(2)5*cos 56*cos 61*sin 12*sin 22'*sin(2)5*sin 56*sin 6l l l l l l l l l l xg l l l l l yg l l q q q q q q q q q q q q q q q q ü+=+ïïïï+=ïýï++-a =++ïïï++-a =++ïþ化简整理成方程左边仅含未知量项的形式,即得:2*cos 23*cos 341*cos 1(1)2*sin 23*sin 31*sin 1(2)2*cos 22'*cos(2)5*cos 56*cos 61*cos 1(3)2*sin 22'*sin(2)5*sin 56*sin 61*sin 1(4)l l l l l l l l l l l xg l l l l l yg l q q q q q q q q q q q q q q q q ü-=--=-+-a --=-+-a --=-………………………………………………………………………ïïïïïýïïïïïþ(式2)在求解(式2)中各变量时,用牛顿迭代法会比较直观,但由于牛顿迭代法不便于限制l 5,l 6的位置,在有两种位置均满足上式时,无法限定它得出题中要求的解。
机械原理课程设计六杆机构和凸轮机构设计讲诉
目录第一章内容介绍1- 1 ............................................................... 机构简介.21- 2 ............................................................... 设计数据.21- 3 机构简图 (3)第二章六杆机构设计2- 1 设计内容 (3)2- 2 ........................................................... 设计数据 52- 3 设计运动分析 (5)第三章凸轮设计3- 1 设计内容 (7)3- 2 ....................................................... 图解法设计73- 3 ........................................................... 凸轮机构的计算机辅助设计................................... (8)内容介绍第一章1•机构简介压床是应用广泛的锻压设备,用于钢板矫直、压制零件等。
如图所示为某压床的运动示意图。
其中,六杆机构ABCDEF为其主体机构,电动机经联轴器带动减速器的三对齿轮(Z1-Z2, Z3-Z4, Z5-Z6)将转速降低,然后带动压床执行机构(六杆机构ABCDEF )的曲柄1转动,六杆机构使滑块5克服阻力F r而上下往复运动,实现冲压工艺。
为了减小主轴的速度波动,在曲轴A上装有飞轮,在曲柄轴的另一端装有供润滑连杆机构各运动副用的油泵凸轮。
2 •设计数据:设计数据见表1和表2。
12017 35 53 20 65 8 55 150 30 150 30 18 36 54156010501703090703•机构简图第二章 六杆机构设计1. 设计内容通过已知数据利用图解法按比例作出该六杆机构 的运动简图的两个极限位置(如图2-1)图1-1六杆机构图1-2 凸轮机构 图1-3 齿轮机构并以 以点 AC 疋字说明:先选定比例尺i =0.0015m/mm ,根据所给参数,先在图上确定A 、D 亮点及滑块F 运动轨迹 所在直线。
机械原理大作业1(六杆机构)
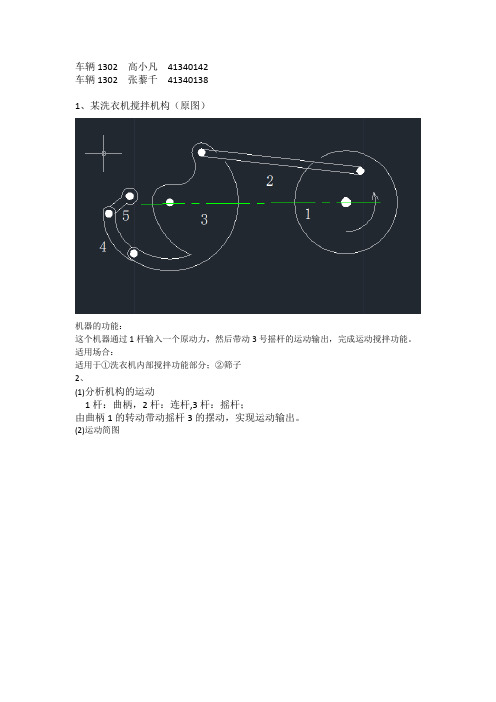
车辆1302 高小凡41340142车辆1302 张藜千413401381、某洗衣机搅拌机构(原图)机器的功能:这个机器通过1杆输入一个原动力,然后带动3号摇杆的运动输出,完成运动搅拌功能。
适用场合:适用于①洗衣机内部搅拌功能部分;②筛子2、(1)分析机构的运动1杆:曲柄,2杆:连杆,3杆:摇杆;由曲柄1的转动带动摇杆3的摆动,实现运动输出。
(2)运动简图(3)如图,该六杆机构只有一个原动件----1杆(4)自由度F=3(n-1)-2P5=3*5-2*7=1上述六杆机构的运动形式可简化为如图四杆机构的运动形式,4,5杆的运动作为摇杆3的输出机构。
3、大致测绘出构件尺寸4、确定机构所含杆组的数目和级别(拆杆组),并判断机构的级别;依次拆下4-5/2-3两个II级杆组及原动件1(II级杆组),所以该机构为II级杆组5、用图解法求出最小传动角值:由下图可知,在极限位置2时,压力角最大为70°,则最小传动角为42°6、分析该机构有无急回特性和死点位置;有急回,无死点;180+1809k 1.11180-1809θθ+===>-7、用瞬心法对机构进行运动分析上图中标出了该机构的简化四杆机构的所有瞬心P 12 P 13 P 16 P 23 P 26 P 36其中,绝对瞬心有:P 16 P 36 P 26 相对瞬心有:P 12P 13 P 23速度分析:若1的角速度为w1,则V(P12)=l1*w1V(P23)= [V(P12)/|P12P13|]*|P13P23 | w3= V(P23)/l3w6= V(P23)/| P23P26 |(1)角速度比mv=w6/w2=l1sinv/l3sinuv=0, mv=0,w6=0,此时构件1、2共线,机构处于极限位置;(2)mv=w6/w2=OP13/CP13 (瞬心P13能够用来确定速度比)上图为该机构(六杆机构)全部瞬心(15个)绝对瞬心:P16, P26,P36,P46,P56相对瞬心:P15,P25,P35,P45P14,P24,P34,P13,P23P12中间密集部分的的放大图如下图:8、用杆组法(或其他解析法)对机构进行运动分析(写出数学模型和程序框图);已知该机构的尺寸为:两个固定铰链点a,d,g的坐标分别为(0,0)(420,0)(-80,-35),曲柄原动件|ab|=100mm,连杆2长为300mm,摇杆3长150mm,杆4长100mm,杆5长50mm.经分析,该机构由一个曲柄原动件和两个RRR二级杆组组成的二级机构用杆组法搭建该机构的步奏如下:1)添加曲柄原动件ab;2)添加RRR二级杆组(2-3),杆组的两个动铰链点分别为已有铰链点b和固定铰链点d; 3)在连杆cd上添加铰链点e;4)添加RRR二级杆组(4-5),杆组的两个动铰链点分别为已有铰链点e和固定铰链点g; 5)该机构搭建完成,利用该程序可自动求出任意给定铰链点或构件的位置、速度、和加速度。
机械原理课程设计-压床机构的设计

压床机构设计说明书院系:机电工程学院班级:机械XXX班学号:姓名:指导老师:目录一、设计题目压床机构的设计二、工作原理压床机械是由六杆机构中的冲头(滑块)向下运动来冲压机械零件的。
图1为其参考示意图,其执行机构主要由连杆机构和凸轮机构组成,电动机经过减速传动装置(齿轮传动)带动六杆机构的曲柄转动,曲柄通过连杆、摇杆带动滑块克服阻力F冲压零件。
当冲头向下运动时,为工作行程,冲头在0.75H内无阻力;当在工作行程后0.25H行程时,冲头受到的阻力为F;当冲头向上运动时,为空回行程,无阻力。
在曲柄轴的另一端,装有供润滑连杆机构各运动副的油泵凸轮机构。
三、设计要求电动机轴与曲柄轴垂直,使用寿命10年,每日一班制工作,载荷有中等冲击,允许曲柄转速偏差为±5%。
要求凸轮机构的最大压力角应在许用值[α]之内,从动件运动规律见设计数据,执行构件的传动效率按0.95计算,按小批量生产规模设计。
四、原始数据五、内容及工作量1、根据压床机械的工作原理,拟定执行机构(连杆机构),并进行机构分析。
2、根据给定的数据确定机构的运动尺寸, l CB=0.5l BO4,l CD=(0.25~0.35)l CO4。
要求用图解法设计,并将设计结果和步骤写在设计说明书中。
3、连杆机构的运动分析。
分析出滑块6的位移、速度、加速度及摇杆4的角速度和角加速度。
4、连杆机构的动态静力分析。
求出最大平衡力矩和功率。
5、凸轮机构设计。
根据所给定的已知参数,确定凸轮的基本尺寸(基圆半径r o、偏距e和滚子半径r r),并将运算结果写在说明书中。
画出凸轮机构的实际廓线。
6、 编写设计说明书一份。
应包括设计任务、设计参数、设计计算过程等。
六、设计计算过程1. 压床执行机构(六杆机构)的设计根据给定的数据,利用autocad 绘制出当摇杆摆到两极限位置时,机构运动简图(图3)。
图3 摇杆摆到两极限位置时,机构运动简图由图3可知,因为1501=DD (即压头的行程H ),而三角形41O CC 为等边三角形,可推出四边形D D CC 11为平行四边形,则15011414====DD CC O C CO 则5.5235.04==CO CD,由45.0BO CB =,则1004=BO ,3125.016050tan 42==∠E O O ,则0424.17=∠E O O , 6.42241=∠O O B , 在三角形E O O 42中,165)16040(2242=+=O O ,由42412212422412412)(O O O B O B O O O B O O B C O S ⨯-+=∠得出21O B =113.7,同理可得2BO =210.8,所以55.4821222=-=B O B O A O ,3.162122=+=B O A O AB ,所以得到四条杆长A O 2=48.55,AB =162.3,1004=BO ,165)16040(2242=+=O O利用上述求得的曲柄摇杆机构各杆的长度,利用一款四杆机构设计及运动分析软件(图4),输入四杆的杆长后可以得到:行程速比系数K=(1800+θ)/(1800-θ)得,K=1.105,摇杆的摆角α =600。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
evy=0:360;
ev=0:360;
fori=1:1:361
evx(i)=-l6*w6(i)*sind(thed6(i))-l5*w5(i)*sind(thed5(i));
evy(i)=l6*w6(i)*cosd(thed6(i))+l5*w5(i)*cosd(thed5(i));
%angularvelocity.m%
%-------------------------角速度-------------------------%
w2=0:360;
w3=0:360;
w5=0:360;
w6=0:360;
fori=1:1:361
V1=[-105.6*sind(thed2(i)) 67.5*sind(thed3(i)) 0 0;
ev(i)=(evx(i)^2+evy(i)^2)^0.5;
end
figure(4);
x=0:360;
y1=[evx;evy;ev];
plot(x,y1);
xlabel('\theta1');
ylabel('Evx,Evy,Ev');
gridminor;
legend('Evx','Evy','Ev');
L4
L5
L6
α
xG
yG
1-A
26.5
105.6
65.0
67.5
87.5
34.4
25.0
600
153.5
41.7
题目要求:
两人一组计算出原动件从0到360时(计算点数361)所要求的各运动变量的
大小,并绘出运动曲线图及轨迹曲线。
二、题目分析
1)建立封闭图形:
L1+L2=L3+L4
L1+L2=L5+L6+AG
fori=1:1:361
ex(i)=153.5+25*cosd(thed6(i))+34.4*cosd(thed5(i));
ey(i)=41.7+25*sind(thed6(i))+34.4*sind(thed5(i));
e(i)=(ex(i)^2+ey(i)^2)^0.5;
end
figure(2);
l1=26.5;
l2=105.6;
l3=67.5;
l4=87.5;
l5=34.4;
l6=25.0;
a=60;
thed1=0:360;
thed2=0:360;
thed3=0:360;
thed5=0:360;
thed6=0:360;
thed22=0:360;
m=[36.77905;69.573132;-57.53719284;92.66548461];
%Eangularacceleration.m%
%-------------------------E点加速度图像-------------------%
eax=0:360;
eay=0:360;
ea=0:360;
fori=1:1:361
eax(i)=-l6*a6(i)*sind(thed6(i))-l6*w6(i)^2*cosd(thed6(i))-l5*a5(i)*sind(thed5(i))-l5*w5(i)^2*cosd(thed5(i));
fori=1:1:361
x = fsolve(@(x) solveequations(x,thed1(i)),[m(1);m(2);m(3);m(4)]);
m=x;
thed2(i)=x(1);
thed3(i)=x(2);
thed5(i)=x(3);
thed6(i)=x(4);
end
figure(1);%画各个角度图像
functionF=solveequations(x,thed1)
F=[26.5*cosd(thed1)+105.6*cosd(x(1))-67.5*cosd(x(2))-87.5;
26.5*sind(thed1)+105.6*sind(x(1))-67.5*sind(x(2));
26.5*cosd(thed1)+105.6*cosd(x(1))+65*cosd(60)*cosd(x(1))+65*sind(60)*sind(x(1))-153.5-25*cosd(x(4))-34.4*cosd(x(3))
gridminor;
legend('\alpha2','\alpha3','\alpha5','\alpha6');
%Edisplacement.m%
%-----------------------E点位移图像-------------------------%
ex=0:360;
ey=0:360;
e=0:360;
A11=A111*A112;
A12=[l1*cosd(thed1(i));
l1*sind(thed1(i));
l1*cosd(thed1(i));
l1*sind(thed1(i));];
A1=A11+A12;
A2=[-l2*sind(thed2(i)) l3*sind(thed3(i)) 0 0;
l2*cosd(thed2(i)) -l3*cosd(thed3(i)) 0 0;
((105.6+65*cosd(60))*sind(thed2(i))-65*sind(60)*cosd(thed2(i)))*w2(i) 0 -34.4*sind(thed5(i))*w5(i) -25*sind(thed6(i))*w6(i);];
A112=[w2(i);w3(i);w5(i);w6(i)];
A3=A2\A1;
a2(i)=A3(1);
a3(i)=A3(2);
a5(i)=A3(3);
a6(i)=A3(4);
end
figure(5);
y3=[a2;a3;a5;a6];
plot(x,y3);
xlabel('\alpha1');
ylabel('\alpha2,\alpha3,\alpha5,\alpha6');
%-------------------------角加速度--------------------------%
a2=0:360;
a3=0:360;
a5=0:360;
a6=0:360;
fori=1:1:361
% w2 w3 w5 w6
A111=[105.6*cosd(thed2(i))*w2(i) -67.5*cosd(thed3(i))*w3(i) 0 0;
V2=[ (l1)*sind(thed1(i));
-(l1)*cosd(thed1(i));
(l1)*sind(thed1(i));
-(l1)*cosd(thed1(i));];
V3=V1\V2;
w2(i)=V3(1);
w3(i)=V3(2);
w5(i)=V3(3);
w6(i)=V3(4);
end
figure(3);
x=0:360;
y1=[ex;ey;e];
plot(x,y1);
xlabel('\theta1');
ylabel('ex,ey,e');
gridminor;
legend('ex','ey','e');
%Eangularvelocity.m%
%--------------------E点速度图像--------------------%
y2=[w2;w3;w5;w6];
plot(x,y2);
xlabel('\theta1');
ylabel('\omega2,\omega3,\omega5,\omega6');
legend('\omega2','\omega3','\omega5','\omega6');
gridminor;
%angularacceleration.m%
2) 机构运动分析
a、角位移分析
由图形封闭性得:
b、角速度分析
上式对时间求一阶导数,可得速度方程:
化为矩阵形式为:
c、角加速度分析:
矩阵对时间求一阶导数,可得加速度矩阵为:
d、E点的运动状态
位移:
速度:
加速度:
三、源程序
%Run.m%
thetas;%角度fine
angularvelocity;%角速度fine
% F=[l1*cosd(thed1)+l2*cosd(x(1))-l3*cosd(x(2))-l4;
% l1*sind(thed1)+l2*sind(x(1))-l3*sind(x(2));
% l1*cosd(thed1)+l2*cosd(x(1))-l2'*cosd(60)*cosd(x(1))+l2'*sind(60)*sind(x(1))-153.5-l6*cosd(x(4))-l5*cosd(x(3));
平面六杆机构的运动分析
成 绩
指导老师
班 级
学 号
一、题目说明
所示为一平面六杆机构。设已知各构件的尺寸如下表所示,又知原动件1 以等角速度ω1=1rad/s 沿逆时针方向回转,试求各从动件的角位移、角速度及角加速度以及E 点的位移、速度及加速度的变化情况。