平面六杆机构运动分析
平面机构的自由度与运动分析

平面机构的自由度与运动分析一、平面机构的自由度平面机构是指机构中的构件只能在一个平面内运动的机构,它由多个连接杆、转动副和滑动副组成。
平面机构的自由度是指机构中能够独立变换位置的最小的连接杆数目,也可以理解为机构中独立的变量的数量。
对于平面机构,其自由度可以通过以下公式计算:自由度=3n-2j-h其中,n表示连接杆的数量,j表示驱动链的数量,h表示外部约束的数量。
根据上述公式可以看出,自由度与平面机构中连接杆的数量和驱动链和外部约束的数量有关。
连接杆的数量越多,机构的自由度就越大,可以实现更复杂的运动。
驱动链的数量越多,机构中的动力驱动器越多,自由度就越小,机构的运动变得更加确定。
外部约束的数量越多,机构中的约束条件就越多,自由度就越小,机构的运动也会变得更加确定。
二、平面机构的运动分析1.闭合链和链架分析:首先需要确定机构中的闭合链和链架,闭合链是指机构中连接杆形成一个封闭的回路,闭合链中的连接杆数目应该为n 或n-1,n是机构中的连接杆数量。
链架是指机构中的连接杆形成一个开放的链路。
通过分析闭合链和链架中的链接关系和约束条件,可以确定机构中构件的位置和运动方式。
2.位置和速度分析:根据机构的连接杆的长度和角度,可以通过几何方法或代数方法确定机构中构件的位置和速度分量。
通过分析连接杆的长度和角度的变化规律,可以推导出机构中构件的位置和速度随时间的变化关系。
3.加速度和动力学分析:根据机构中各个构件的位置和速度,可以通过几何方法或动力学方法计算构件的加速度和动力学特性。
通过分析机构中构件的加速度和动力学特性,可以确定机构中构件的运动稳定性和质量分布。
4.动力分析:对于需要携带负载或进行力学传动的机构,需要进行动力学分析,确定机构中各个构件的受力和承载能力。
通过分析机构中构件的受力情况,可以确定机构的设计参数和强度要求。
总结起来,平面机构的自由度与运动分析是确定机构中构件位置和运动状态的重要方法,通过分析机构中的闭合链和链架、构件的位置和速度、加速度和动力学特性,可以确定机构的运动方式和特性,为机构的设计和优化提供依据。
机械原理-机构运动分析的解析法
l
1
φ θ
2
l
x
a2 x 2l cos al sin a2 y 2l sin al cos
已知:构件的长度L及运动参数角位置θ 、角速度ω 、 角加速度ε ,1点的运动参量。
求: 3点的运动参量。
解: P 3x P 1 x l cos( ) v3 x v1 x l sin( ) P v3 y v1 y l cos( ) 3y P 1 y l sin( )
运 动 副 点 号
要求赋值
构 件 号
构 件 长 度
角位置角速度角加速 度,位置 速度 加速 度 n1
r1
m>0——实线 M<=0——虚线
不赋值
已知: 外运动副N1的位置P、速度v、加速度a,导路上任意参考点 N2的位置P、 速度v、加速度a,构件1的长度及导路的角位置、角速度、角加速度。 求:内运动副N3的运动参量、构件①的运动参量、 r2、vr2、ar2
P 3x P 1x l1 cos 1 P 3y P 1 y l1 sin 1
P 3y P 2y 2 arctan P P 2x 3x
rrrk(m,n1,n2,n3,k1,k2,r1,r2,t,w,e,p,vp,ap)
装 配 模 式
n3 k1 k2 r2 n2 N3’
}
y
3
l
1
φ
l
2
θ
x
bark(n1,n2,n3,k,r1,r2,gam,t,w,e,p,vp,ap)
关 键 点 号 构 n n 件 1 1 号 n n ∠ n3 n1 2 3 间 间 n2 距 距 离 离 角位置角速度 角加速度,位 置 速度 加速度
平面机构的运动分析习题和答案

71.在图示的四杆机构中, mm, mm, mm, 。当构件1以等角速度 rad/s逆时针方向转动时,用瞬心法求C点的速度。
72.图示机构运动简图取比例尺 m/mm。已知 rad/s,试用速度瞬心法求杆3的角速度 。
51.图示为按比例尺绘制的牛头刨床机构运动简图和速度矢量多边形。试由图中的比例尺计算导杆3的角速度 和滑块2的角速度 ,并指出其方向。(提示: 为构件3上特殊点,据 、 求得,作题时不必去研究 如何求得。)
(取 m/mm, (m/s)/mm。)
52.试求图示机构的速度瞬心数目、各瞬心位置、各构件角速度的大小和方向、杆2上点M的速度大小和方向。(机构尺寸如图: mm, mm, mm, mm, , mm, m/mm。)已知 rad/s。
9.当两构件组成转动副时,其速度瞬心在处;组成移动副时,其速度瞬心在处;组成兼有相对滚动和滑动的平面高副时,其速度瞬心在上。
10..速度瞬心是两刚体上为零的重合点。
11.铰链四杆机构共有个速度瞬心,其中个是绝对瞬心,个是相对瞬心。
12.速度影像的相似原理只能应用于的各点,而不能应用于机构的的各点。
13.作相对运动的3个构件的3个瞬心必。
86.图示机构的运动简图取长度比例尺 m/mm,其中 m, m, m,构件1以 rad/s等角速度顺时针方向转动,试用相对运动图解法求图示位置:
(1) 、 、 和 的大小和方向;
(2) 、3、4和5的大小和方向;
(3)在机构运动简图上标注出构件2上速度为零的点 ,在加速度多边形图上标注出构件2上点 的加速度矢量 ,并算出点 的加速度 的大小。在画速度图及加速度图时的比例尺分别为: =0.02 (m/s)/mm, (m/s2)/mm。
机械原理课程设计六杆机构运动与动力分析
机械原理课程设计六杆机构运动与动⼒分析⽬录第⼀部分:六杆机构运动与动⼒分析⼀.机构分析分析类题⽬ 3 1分析题⽬ 32.分析内容 3 ⼆.分析过程 4 1机构的结构分析 42.平⾯连杆机构运动分析和动态静⼒分析 53机构的运动分析8 4机构的动态静⼒分析18 三.参考⽂献21第⼆部分:齿轮传动设计⼀、设计题⽬22⼆、全部原始数据22三、设计⽅法及原理221传动的类型及选择22 2变位因数的选择22四、设计及计算过程241.选取两轮齿数242传动⽐要求24 3变位因数选择244.计算⼏何尺⼨25 五.齿轮参数列表26 六.计算结果分析说明28 七.参考⽂献28第三部分:体会⼼得29⼀.机构分析类题⽬3(⽅案三)1.分析题⽬对如图1所⽰六杆机构进⾏运动与动⼒分析。
各构件长度、构件3、4绕质⼼的转动惯量如表1所⽰,构件1的转动惯量忽略不计。
构件1、3、4、5的质量G1、G3、G4、G5,作⽤在构件5上的阻⼒P⼯作、P空程,不均匀系数δ的已知数值如表2所⽰。
构件3、4的质⼼位置在杆长中点处。
2.分析内容(1)对机构进⾏结构分析;(2)绘制滑块F的运动线图(即位移、速度和加速度线图);(3)绘制构件3⾓速度和⾓加速度线图(即⾓位移、⾓速度和⾓加速度线图);(4)各运动副中的反⼒;(5)加在原动件1上的平衡⼒矩;(6)确定安装在轴A上的飞轮转动惯量。
图1 六杆机构⼆.分析过程:通过CAD制图软件制作的六杆机构运动简图:图2 六杆机构CAD所做的图是严格按照题所给数据进⾏绘制的。
并机构运动简图中活动构件的序号从1开始标注,机架的构件序号为0。
每个运动副处标注⼀个字母,该字母既表⽰运动副,也表⽰运动副所在位置的点,在同⼀点处有多个运动副,如复合铰链处或某点处既有转动副⼜有移动副时,仍只⽤⼀个字母标注。
见附图2所⽰。
1.机构的结构分析如附图1所⽰,建⽴直⾓坐标系。
机构中活动构件为1、2、3、4、5,即活动构件数n=5。
机械原理课程设计六杆机构运动分析
机械原理课程设计说明书题目六杆机构运动分析学院工程机械学院专业机械设计制造及其自动化班级机制三班设计者秦湖指导老师陈世斌2014年1月15日目录一、题目说明∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙ 21、题目要求∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙ 32、原理图∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙ 33、原始数据∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙ 3二、结构分析∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙ 4三、运动分析∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙ 51、D点运动分析∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙ 82、构件3运动分析∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙93、构件4运动分析∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙94、点S4运动分析∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙10四、结论∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙10五、心得体会∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙10六、参考文献∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙11一、题目说明1、题目要求此次机械原理课程设计是连杆机构综合,通过对其分析,选择合适的机构的尺寸大小,并进行下列操作:⑴对机构进行结构分析;⑵绘制滑块D的运动线图(即位移、速度和加速度线图);⑶绘制构件3和4的运动线图(即角位移、角速度和角加速度线图);⑷绘制S4点的运动轨迹。
基于UGCAE的平面六杆机构的运动分析
基于UG/CAE的平面六杆机构的运动分析1、题目说明如上图所示平面六杆机构,试用计算机完成其运动分析。
已知其尺寸参数如下表所示:题目要求:两人一组计算出原动件从0到360时(计算点数37)所要求的各运动变量的大小,并绘出运动曲线图及轨迹曲线。
注:为了使计算的结果更好的拟合运动的实际情况,同时考虑到UG在运动仿真分析计算方面的快速性,我们决定在绘制曲线时将计算点由37点增加到600点。
数据输出到Excel表格时计算点取100点。
建模及其分析方法附后!2、建模及其运动分析软件介绍:UG NX是集CAD\CAE\CAM于一体的三维参数化软件,也是当今世界最先进的设计软件,它广泛应用于航空航天、汽车制造、机械电子等工程领域。
还有在系统创新、工业设计造型、无约束设计、装配设计、钣金设计、工程图设计等方面的功能。
运动仿真是UG/CAE(Computer Aided Engineering)模块中的主要部分,它能对任何二维或三维机构进行复杂的运动学分析、动力分析和设计仿真。
通过UG/Modeling的功能建立一个三维实体模型,利用UG/Motion的功能给三维实体模型的各个部件赋予一定的运动学特性,再在各个部件之间设立一定的连接关系既可建立一个运动仿真模型。
UG/Motion的功能可以对运动机构进行大量的装配分析工作、运动合理性分析工作,诸如干涉检查、轨迹包络等,得到大量运动机构的运动参数。
通过对这个运动仿真模型进行运动学或动力学运动分析就可以验证该运动机构设计的合理性,并且可以利用图形输出各个部件的位移、坐标、加速度、速度和力的变化情况,对运动机构进行优化。
我们通过学习UG,通过建立平面六杆机构模型,通过UG/CAE模块对平面连杆的运动进行分析。
3.六连杆机构的三维造型连杆L1连杆L2连杆L3连杆L5连杆L6六杆机构装配示意图机构装配后运动演示见附件—平面六杆运动演示.avi (本报告相同目录下)3. 运动分析数据计算结果在附件的Excel表格中。
基于MATLAB与SolidWorks的平面六杆机构运动分析及仿真
表3平面六杆机构中预设的部分构件初始参数
3.2平面六杆机构motion运动分析
本部分介绍了利用SolidWorks中的motion插件
进行运动仿真分析以输出平面六杆机构中构件5的
运动图像。首先,利用SolidWorks中的motion功能,将
电机加装在杆*上,设定电机转速恒定为10 r=d・s>#
,X motion 分析中,对构件 5 进行运动分析
终端
发
至
,
回 入库
旧管
系统,
资 的用 ,
本:
Research and Design "0 Fixed Network Terminal Inventory Management
U*#=)-
bang bing
(Chongbo Information Technology Researph Institute Ko・HLtd・,Nanjing Jiangs. 211500)
,
输出平面六杆机构中构件 5 的位移、速度、加速度运
动图像⑷(构件5运动图像如图4所示)。
0.00 0.72 1.44 2.16 2.88 3.60 4.32 5.04 5.76 6.48 7.20
Js
4>1
Ie
>FG
0.00 0.72 1.44 2.16 2.88 3.60 4.32 5.04 5.76 6.48 7.20
Js
4>2滑块I方
-速度
@
50 100 150 200 250 300 350 400
角度JM
图!平面六杆机构构件4的运动图像
' (" " 789:;<FG*H
基于Simulink的曲柄导杆移动从动件平面六杆机构的运动分析
由式 ( ) 7 可得 到速度 的矩 阵方 程
s n0 i
…
MA L B软 件 的 Smuik仿真 用 于机械 工程 中 TA i l n
]C盯 】 L. 1O ㈩ S r- 3; O ) 3
39sn 03 i “ J
机构 的运 动学 仿 真 , 简单 、 直观 , 只需 通过 M 文 件 编 写运 动学 方程 , 将数 据 设 置 以 A ry形 式 存储 , 再 r a 用
第 3 2卷第 5期
21 0 1年 1 月 0
华
北
水
利
水 电
学
院
学
报
V0 _ No 5 l 32 . 0c 2 1 t 01
J u na fNot Ch n nsiu e o ae ns r a c n d o l crc Po r o r lo rh i a I ttt fW t rCo e v n y a d Hy r e e ti we
2 0 2) 7 0 8( : 3—7 5.
机构 , 曲柄 部分 是 机构 的 主动件 , 在实 际应 用 中从 但 动件 却 在起 着 执行 功 能 , 以 采取 各 种 措 施 使 执 行 可
件 来 回摆 动 , 或始 终按 照 某一 特定 的方 向运 动 . 利用 Smuik仿 真模 型 以 图形 的形式 显示 出系 i l n 统 的运 动 特性 , 便 、 确地 得 到机 构 的运 动 数 据 . 方 准
将式( ) 时间 t 6对 求导 可得 到
J cc 盯 。s吾 7 。。 +si- ( ss in竹 吾 n _)
I O 一 s 吾) s wns竹 丌 sc5 。 n = io
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
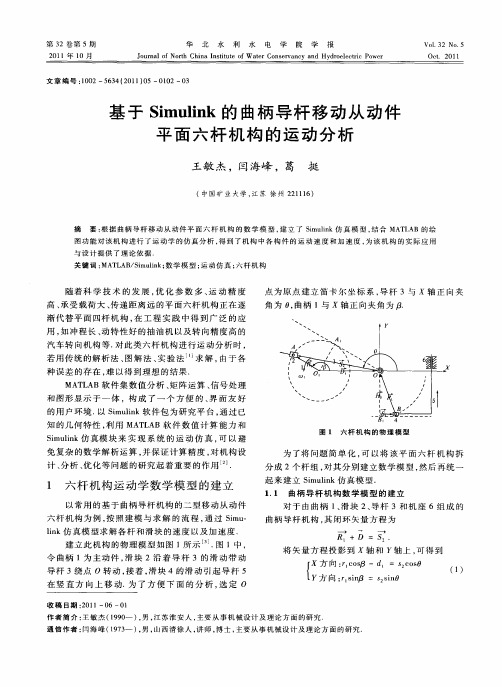
平面六杆机构运动分析
2111306008 王健
1、 曲柄摇杆串RRP 型II 级杆组平面六杆机构数学模型
如图1所示,当曲柄1做匀速转动时,滑块5做往复移动,该机构的行程速比系数大于1,有急回特性,且传动角较大。
设曲柄1的角速度为ω,并在铰链C 建立坐标oxy 。
由图可知,该机构由构件1、2、3、6组成的曲柄导杆机构和构件3、4、5、6组成的摆动滑块机构组成。
机构中错误!未找到引用源。
(i=1,2,3,4)分别表示曲柄l 、机架2、导杆3、连杆4的长度及滑块5的行程用5s 表示。
曲柄转动中心A 的坐标(y x H H ,)。
图1 六杆机构运动简图
对构件1、2、3、6组成的曲柄导杆机构进行运动分析。
曲柄1转动角度 ϕ、连杆2转动角度 错误!未找到引用源。
及摇杆3转动角度错误!未找到引用源。
都是以X 轴正方向为起始边的度量角度,单位为rad 。
并设机构初始位置为曲柄1转角
0=ϕ的位置。
该机构的位置方程为: ϕθδππi i i i x i y e L e L e L e H e H 1232/+=++ (1) 式(1)中x 、y 轴的分量等式为:
{
θϕδθϕδcos cos cos cos sin sin 213213L L L H L L L H x y +=+-+=+ (2) 当 错误!未找到引用源。
在 3600-作匀速变化时,就可以求出对应的连杆2的转角 错误!未找到引用源。
以及摇杆3的转角δ的值。
将式消去 错误!未找到引用
源。
,得到: ()()22213213cos cos sin sin L L H L L H L x y =--+-+ϕδϕδ (3) 将(3)式分解,并分别定义:
()212122231cos )sin (ϕϕL H L H L L A x y ++-+-=
)sin (2131ϕL H L B y -=
)cos (2131ϕL H L C x +=
摇杆3的角位移
()]/)tan[(2112121211C A C A B B a --+-+=δ (4) 由(2)式可得连杆 2 的角位移
]/)sin sin arcsin[(213L L L H y ϕδθ-+= (5)
假设曲柄作匀角速度dt d /φω=是常数,对式2求时间导数,得到连杆2的角速度2ω以及摇杆3角速度3ω,方程式如下:
(
)()][sin cos sin cos sin cos 11233322ϕωϕωωωδδθθL L L L L L =-- (6) 对式(6)求时间导数, 得到连杆 2 的角加速度及摇杆 3 的角加速度2a ,方程式
如下: ()()]
[cos cos cos sin sin sin sin cos sin cos 3232221232322212233322δωθϕωδωθϕωδ
δθθL L w L L L w L a a L L L L -+-----= (7) 再对构件3、4、5、6 组成的摆动滑块机构进行运动分析。
首先建立机构位置方程,方程如下:
2/3543πφδi i i e S e L e L += (8)
式中5S 为滑块的行程。
按同样的方法可分别得到滑块 5 的位置、速度、加速度方程。
连杆4和滑块5的位置方程为:
()()⎪⎩⎪⎨⎧⎥⎦⎤⎢⎣⎡⎪⎭⎫ ⎝⎛-=-=δδδψδ
ψcos /cos arctan sin sin 32324345L L L L L S (9) 连杆 4 角速度4ω和滑块 5 速度5ν方程为: ()()()δωδωωνψψsin cos 01sin cos 33334544L L L L --= (10) 连杆 4 角加速度4a 和滑块 5 加速度5a 方程为:
()()()ψ
ωδωδψωδωδψψcos cos sin sin sin cos 0
1sin cos 42432333424323334544L L L a
L L L a a a L L -+++--=
(
11)
2 利用MATLAB 求解
%平面六杆机构运动分析
%各杆长度输入
l1=input('曲柄长度(mm)');
l2=input('连杆长度mm:');
l3=input('摇杆长度mm:');
l4=input('连杆2长度mm:');
HX=input('曲柄在X 轴方向坐标值mm:');
HX=input('曲柄在Y 轴方向坐标值mm:');
omg1=input('角速度rad/s:');
dr=pi/180.0;%角度与弧度的转换
%机构的初始位置
th(1)=0.0;
dth=5*dr;%循环增量
%计算曲柄摇杆机构的位置角度theta 和滑块的delta
%曲柄0-360度旋转,步长为5度
for i=1:72
ct=i*dth;
A1=l3^2-l2^2+(HY-l1*sin(th(1)))^2+(HX+l1*cos(th(1)))^2;
B1=2*l3*(HY-l1*sin(th(1)));
C1=2*l3*(HX+l1*cos(th(1)));
delta=2*atan((B1+sqrt(B1^2-A1^2+C1^2))/(-A1-C1))+2*pi;
theta=-asin((HY+l3*sin(delta)-l1*sin(th(1)))/l2)+pi;
w(i,:)=[th(1) theta delta];%矩阵,单位弧度
th(1)=th(1)+dth;
end
%(2)————计算曲柄摇杆机构的角速度omg2和omg3
for i=1:72
ct(2)=(i-1)*dth;
A=[-l2*sin(w(i,2)) l3*sin(w(i,3));-l2*cos(w(i,2)) l3*sin(w(i,2))];
B=[l1*omg1*sin(ct(2));l1*omg1*cos(ct(2))];
om=inv(A)*B;%输出角速度矩阵
om2=om(1);
om3=om(2);
om23(i,:)=[ct(2) om2 om3];%矩阵[曲柄转角导杆角速度滑块速度],单位弧度
end
%(3)———曲柄摇杆机构加速度
... ...
%(4)————计算滑块位移
for i=1:72
ct(3)=(i-1)*dth;
psi=atan(sqrt(l4^2-l3^2*cos(w(i,3)))/(l3*cos(w(i,3))))+pi;
S5=l4*sin(psi)-l3*sin(w(i,3));
s45(i,:)=[c(3) psi S5];%矩阵[曲柄转角连杆2转度滑块行程]
end
subplot(2,2,1)
plot(s45(:,1)/dr,s45(:,3))
grid
xlabel('曲柄转角(度)')
ylabel('滑块位移(mm)')
%(5)—————计算滑块5速度
for i=1:72
et=(i-1)*dth;
E=[-l4*sin(psi) 0;-l4*cos(psi) 1];
F=[l3*om3*sin(w(i,4));-l3*om3*cos(w(i,4))];
v=inv(E)*F;
v1=v(1);
v2=v(2);
v45(i,:)=[et v1 v2];
end
subplot(2,2,2)
plot(v45(:,1)/dr,v45(:,3))
grid
xlabel('曲柄转角(度)')
ylabel('滑块速度(mm/s)')
3、机构仿真结果分析
程序运行时,输入以下内容:曲柄长度mm:15;连杆 1 长度mm:80;摇杆长度mm:65;连杆 2 长度mm:70;曲柄在X 轴方向坐标值mm:65;曲柄在Y 轴方向坐标值mm:65;角速度12rad/s。
得到图2 所示的六杆机构滑块5 的位移、速度、加速度的运动规律线图。