补偿器选择与计算
波纹补偿器型号大全-参数选用及公式计算
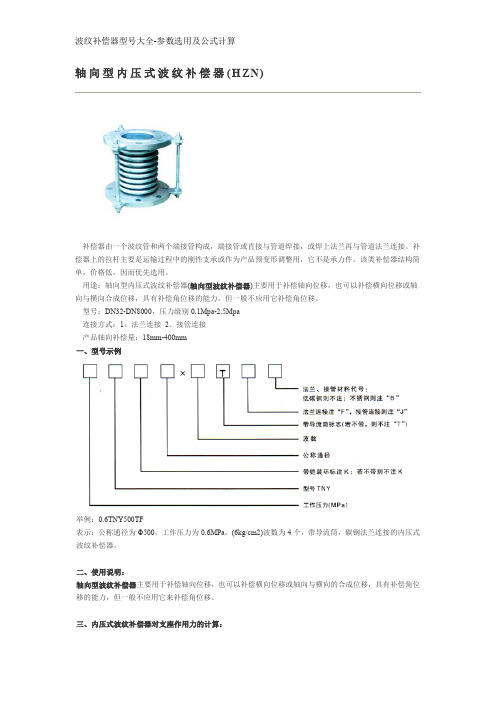
轴向型内压式波纹补偿器(HZN)补偿器由一个波纹管和两个端接管构成,端接管或直接与管道焊接,或焊上法兰再与管道法兰连接。
补偿器上的拉杆主要是运输过程中的刚性支承或作为产品预变形调整用,它不是承力件。
该类补偿器结构简单,价格低,因而优先选用。
用途:轴向型内压式波纹补偿器(轴向型波纹补偿器)主要用于补偿轴向位移,也可以补偿横向位移或轴向与横向合成位移,具有补偿角位移的能力,但一般不应用它补偿角位移。
型号:DN32-DN8000,压力级别0.1Mpa-2.5Mpa连接方式:1、法兰连接2、接管连接产品轴向补偿量:18mm-400mm一、型号示例举例:0.6TNY500TF表示:公称通径为Φ500,工作压力为0.6MPa,(6kg/cm2)波数为4个,带导流筒,碳钢法兰连接的内压式波纹补偿器。
二、使用说明:轴向型波纹补偿器主要用于补偿轴向位移,也可以补偿横向位移或轴向与横向的合成位移,具有补偿角位移的能力,但一般不应用它来补偿角位移。
三、内压式波纹补偿器对支座作用力的计算:内压推力:F=100·P·A轴向弹力:Fx=Kx·(f·X)横向弹力:Fy=Ky·Y 弯矩:My=Fy·L弯矩:Mθ=Kθ·θ 合成弯矩:M=My+Mθ式中:Kx:轴向刚度N/mm X:轴向实际位移量mmKy:横向刚度N/mm Y:横向实际位移量mmKθ:角向刚度N·m/度θ :角向实际位移量度P:工作压力MPa A:波纹管有效面积cm2(查样本)L:补偿器中点至支座的距离m四、应用举例:某碳钢管道,公称通径500mm,工作压力0.6MPa,介质温度300°C,环境最低温度-10°C,补偿器安装温度20°C,根据管道布局(如图),需安装一内压式波纹补偿器,用以补偿轴向位移X=32mm,横向位移Y=2.8mm,角向位移θ=1.8度,已知L=4m,补偿器疲劳破坏次数按15000次考虑,试计算支座A的受力。
CE标准______矩形金属波纹补偿器重量计算及选型
CE波单位长度重量:单波:630×2.5×7.85/1000= 12.37 kg/m双波:1114×2.5×7.85/1000= 21.86 kg/m矩形金属波纹补偿器矩形金属波纹补偿器主要用于输送气体或含尘气体管道及风机出口,用来吸收位移和(或)减振。
主要技术参数:压力:真空-0.1Mpa温度:-40-400截面:任意尺寸波形:CE波、U形波、V形波、UV形波材料:考顿钢(CE)、不锈钢、碳钢等角部:圆角、斜角、像机角CE标准产品CE标准波纹补偿器是根据美国CE公司相关标准研制的,主要特点是波纹管材质普遍选用耐候性钢:考顿钢(COR-TEN);(当然亦可选用奥氏体不锈钢)。
考顿钢相对于奥氏体不锈钢来说成本低廉,主要用于温度较低的火电厂锅炉烟风道系统。
其它工况相近的管道上也可以选用CE矩形波纹补偿器。
1.CE标准波形参数表CE标准波形根据波高可分为全高和半高两种波形参数,见下表:说明:(1)推荐选用全高波形;当矩形管道横截面积小于4.6m2,以及管道尺寸有一边小于1.2m(但应大于0.6m)的场合时,宜选用半高波形。
(2)多波形式的CE波纹补偿器均由单波和双波组合而成(见图1)。
(3)表中a、b表示矩形管道接口尺寸。
2.CE波形单波轴向补偿性能表补偿量(mm) 材料波形介质温度(℃)≤100 ≤200 ≤315 ≤350 ≤375 ≤400考顿钢全高(CEQ) ±24 ±21 ±19.8 ±18.7半高(CEB) ±11 ±9.8 ±9 ±8.6 不锈钢全高(CEQ) ±31 ±30 ±28 ±27.7 ±27.4 ±27半高(CEB) ±14.5 ±13.6 ±13 ±12.8 ±12.6 ±12.4 说明:(1)产品作50%预拉伸后,轴向补偿量±24、±11……相当于可以单方向压缩48、22……;(2)如介质温度〉400℃,请与我公司联系,进行特殊设计。
热力管线补偿器的计算

热力管线补偿器的计算热力管线补偿器是工业生产中常用的管道连接件,主要用于补偿管道中由于温度变化引起的热胀冷缩应力,以保证管道的正常运行。
本文将从热胀冷缩的基本原理、补偿器的种类和结构特点以及补偿器的计算方法等方面进行详细阐述。
一、热胀冷缩的基本原理热胀冷缩是指物体在温度变化时因热量的增加和减少而导致体积的变化。
对于管道来说,当管道在工作温度下受热胀冷缩引起的应力超过一定限制时,就会产生管道的变形和破裂等严重后果。
因此,为了保证管道的正常运行,必须采取一定的措施,如采用热力管线补偿器来吸收管道的热胀冷缩应力。
二、热力管线补偿器的种类和结构特点热力管线补偿器根据其结构形式可以分为固定式补偿器、游动式补偿器和活动式补偿器三大类,其中又有多种不同的型号。
这些不同类型的补偿器在结构上略有差异,但其共同特点是能够在管道受到热胀冷缩作用时保持一定的相对位移,以吸收管道的应力。
固定式补偿器主要由支座、托座、伸缩节等组成。
它通过固定管道的一端,使另一端能够在一定范围内自由伸缩,以吸收管道的热胀冷缩应力。
游动式补偿器是通过管道各部分的游动连接实现补偿效果的。
它具有较强的自适应能力,能够根据管道的变形情况自动调整自身的形状,以保证管道的正常运行。
活动式补偿器则是通过活动的波纹管、金属软管等实现补偿效果的。
它具有良好的柔性和弹性,能够在管道受到热胀冷缩应力时自由伸缩,有效减少管道的应力。
三、热力管线补偿器的计算方法1.管道的补偿量计算管道的补偿量计算一般根据管道的材质、长度、温度变化和管道支承方式等要素进行综合考虑。
具体计算方法可参考以下公式:△L=α×L×△T其中,△L表示管道的补偿量,α为管道材料的线膨胀系数,L为管道长度,△T为管道工作温度变化量。
2.补偿器的选择计算补偿器的选择计算主要根据管道的补偿量、管道支承方式和环境条件等因素进行综合考虑。
一般需要计算和确定补偿器的安装位置和型号,以保证补偿器的有效工作。
L型和方形补偿器补偿器力学计算

L型和方形补偿器补偿器力学计算补偿器在机械设计中扮演着非常重要的角色,它能够有效地补偿由于温度变化、机械变形等原因引起的线性和角度误差。
其中,L型和方形补偿器是常用的两种类型,下面将分别对它们的力学计算进行详细介绍。
L型补偿器由两段不等长度的杆件组成,形成"L"字形。
其中,较长的杆件称为主杆件,较短的杆件称为从杆件。
在实际应用中,主杆件一般固定不动,而从杆件用于补偿线性误差。
下面将详细介绍L型补偿器的力学计算方法。
1.1补偿量计算L型补偿器的补偿量可以通过以下公式计算:ΔL=α*L*ΔT其中,ΔL表示补偿量,α表示材料的线膨胀系数,L表示从杆件的长度,ΔT表示温度变化。
1.2力的计算L型补偿器在工作过程中需要承受一定的力。
其中,主要包括补偿力和应力。
补偿力可以通过以下公式计算:F=ΔL*k其中,F表示补偿力,ΔL表示补偿量,k表示补偿器的刚度系数。
应力可以通过以下公式计算:σ=F/A其中,σ表示应力,F表示补偿力,A表示补偿器的截面积。
方形补偿器由两段等长度的杆件和两个连接杆件组成,形成"口"字形。
其中,连接杆件可自由伸缩,用于补偿角度误差。
下面将详细介绍方形补偿器的力学计算方法。
2.1补偿角度计算方形补偿器的补偿角度可以通过以下公式计算:Δθ=α*L*ΔT/L1其中,Δθ表示补偿角度,α表示材料的线膨胀系数,L表示杆件的长度,ΔT表示温度变化,L1表示连接杆件的长度。
2.2力的计算方形补偿器在工作过程中需要承受一定的力。
其中,主要包括补偿力和应力。
补偿力可以通过以下公式计算:F=Δθ*k其中,F表示补偿力,Δθ表示补偿角度,k表示补偿器的刚度系数。
应力可以通过以下公式计算:σ=F/A其中,σ表示应力,F表示补偿力,A表示补偿器的截面积。
总结:L型和方形补偿器在力学计算方面有许多相似之处,都需要考虑补偿量、补偿力和应力。
只是在补偿的形式上有所不同,L型补偿器主要用于补偿线性误差,方形补偿器主要用于补偿角度误差。
波纹补偿器相关计算公式
波纹补偿器相关计算公式波纹补偿器习惯上也被称为称为膨胀节、伸缩节,其补偿能力源于波纹管的弹性变形,包括拉伸、压缩、弯曲及组合变形这几种状态。
安装环境不同,波纹管补偿器发生的变化也不同。
因此在选择波纹补偿器时,是需要依据相关公式进行计算的。
波纹管补偿器的相关计算公式:1.热力管道的热伸长量通常按下式计算:Δx=α(t1-t2)L其中:Δx ——管道的热伸长量,mm;α——钢管的线膨胀系数,mm/(m ℃);t1 ——管内介质温度,℃,管内介质指蒸汽、热水、过热水等;t2 ——管道安装时的温度,℃;L ——管道计算长度,m。
2.安装轴向型补偿器的管道轴向推力F,按下式计算:Fx=Fp+Fm+Fs式中:Fp——内压力产生的推力;FS——波纹管补偿的弹性反力;Fm——管道活动支架的摩擦力。
计算固定支架推力时,应按管道的具体敷设方式,参考上述公式按支架两侧管道推力的合力计算。
3.管道应力验算补偿器在内压作用下的失稳包括两种情况,即平面失稳和轴向柱状失稳。
(1)平面失稳:表现为一个或几个波纹的平面相对于波纹管轴线发生转动而倾斜,但其波平面的圆心基本在波纹管的轴线上。
这是由于内压产生的子午向弯曲应力和周向薄膜应力的合力超过材料屈服强度,局部出现塑性变形所致。
(2)柱失稳:波纹管的波纹连续地横向偏移,使波纹管偏移后的实际轴线成弧形或S 形(在多波情况下呈S形)。
这种情况多数是因为波纹数太多,波纹管有效长度L跟内径d 之比(L/d)太大造成的。
为避免失稳情况发生,对管道应进行应力验算。
客户在购买波纹补偿器时,需要详细说明补偿器的安装地点及管道的相关信息,协助技术人员进行计算,以挑选出最合适的设备。
亚太拥有具备充足经验的生产队伍,专业的技术人员,相信定能为客户提供最合适的产品。
供热管道直埋式补偿器安装要求

有图有真相!供热管道直埋式补偿器安装要求固定点,一是在直管段的端部,二是在管道的分支处。
长的无分支的直线管道两补偿器之间可以不设固定点,靠管道自然形成的“驻点”即可发挥固定点的作用。
驻点是两补偿器之间管道的那个不动点,在管径相同,埋深一致时,驻点与两补偿器间的距离相等。
褡补偿器(包括转角处自然补偿器)至固定点之间的距离不得超过管道的最大安装长度Lmax,管道最大安装长度的定义是固定点至自由端(补偿器)的长度,在此长度下产生的摩擦力不得超过管道许用应力下相应的弹性力。
Lmax按下式计算:常用管道的最大安装长度Lmax。
应考虑16kgf/cm2内压力所产生的环向应力的综合影响。
3.2固定支座的设计计算具有2个管道分支并在主干线上有一处转角管道平面,补偿器的布置应满足Ln <Lmax的条件。
驻点G1、G2的推力为零,所以,此点处不必设置固定支座,但为了防止回填土的不均匀,埋深的不一致和预制保温管外壳粗糙度的不规则等可能会造成驻点的漂移,所以,对处于驻点位置的管道分支处G1、G2需设置支座,以G1为例其轴向推力可按下式计算:F1=Pb2+L2f-0.8(Pb3+L2f)式中F1-固定支座G1的水平推力,kgf;f-管道单位长度摩擦力,Kgf/mPb2-B2膨胀节的弹性力,Kg;Pb3-B3膨胀节的弹性力,Kgfk2-B2膨胀节的刚度,Kgf/mm;△L2-B2膨胀节的补偿量,mm;L2-膨胀节至G1的距离,m;假如某一分支如自G2接出的分支带有补偿器B。
那么,G2还受到一侧向推力的作用,如图中的F2(y),当L5很短(实际布置时L5也应很短),那么,侧向力F2(y)的大小为:F2(y)=Pn*A5+Pb5式中Pn-管道工作压力,Kgf/cm2A5-B5膨胀节的有效面积,cm2;Pb5-B5膨胀节的弹性力kgf。
固定支座G3也驻点位置,从管道和土壤的摩擦力来讲,该点也受到大小相等,方向相反的两个时作用,但应注意到该点同时又受到转角处的盲板力的作用,考虑驻点漂移的影响,固定支座G3的推力F3=1.2Pn*A4式中F3-作用在固定支座G3的水平推力,Kgf;Pn-管道工作压力,Kgf/cm2;A4-B4膨胀节的有效面积,cm2。
补偿器的选用及工程设计要求【全网推荐】

补偿器的选用及工程设计要求[工程类精品文档]本文内容极具参考价值,如若有用,请打赏支持,谢谢!【学员问题】补偿器的选用及工程设计要求?【解答】1.1管道最大安装长度计算有补偿直埋的管道应在二处高固定点,一是在直管段的端部,二是在管道的分支处。
长的无分支的直线管道两补偿器之间可以不设固定点,靠管道自然形成的驻点即可发挥固定点的作用。
驻点是两补偿器之间管道的那个不动点,在管径相同,埋深一致时,驻点与两补偿器间的距离相等。
褡补偿器(包括转角处自然补偿器)至固定点之间的距离不得超过管道的最大安装长度Lmax,管道最大安装长度的定义是固定点至自由端(补偿器)的长度,在此长度下产生的摩擦力不得超过管道许用应力下相应的弹性力。
Lmax按下式计算:常用管道的最大安装长度Lmax.应考虑16kgf/c㎡内压力所产生的环向应力的综合影响。
1.2固定支座的设计计算具有2个管道分支并在主干线上有一处转角管道平面,补偿器的布置应满足Ln F1=Pb2+L2f-0.8(Pb3+L2f)式中F1-固定支座G1的水平推力,kgf;f-管道单位长度摩擦力,Kgf/mPb2-B2膨胀节的弹性力,Kg;Pb3-B3膨胀节的弹性力,Kgfk2-B2膨胀节的刚度,Kgf/mm;△L2-B2膨胀节的补偿量,mm;L2-膨胀节至G1的距离,m;假如某一分支如自G2接出的分支带有补偿器B.那么,G2还受到一侧向推力的作用,如图中的F2(y),当L5很短(实际布置时L5也应很短),那么,侧向力F2(y)的大小为:F2(y)=Pn*A5+Pb5式中Pn-管道工作压力,Kgf/c㎡A5-B5膨胀节的有效面积,c㎡;Pb5-B5膨胀节的弹性力kgf.固定支座G3也驻点位置,从管道和土壤的摩擦力来讲,该点也受到大小相等,方向相反的两个时作用,但应注意到该点同时又受到转角处的盲板力的作用,考虑驻点漂移的影响,固定支座G3的推力F3=1.2Pn*A4式中F3-作用在固定支座G3的水平推力,Kgf;Pn-管道工作压力,Kgf/c㎡;A4-B4膨胀节的有效面积,c㎡.3.3补偿器的选用计算直埋管道由于土壤摩擦力的影响,实际热伸长量要比架空和地沟敷设的管道热热伸长量要小。
采暖固定支架及补偿器的选择、设计与计算
采暖固定支架及补偿器的选择、设计与计算1、固定支架及热补偿的重要性在暖通空调设计中,固定支架是一个不可避免的技术节点。
特别是在北方冬季的热水采暖管道、冬季空调冷冻水供回水管道以及生活热水管道中,管道在“热胀冷缩”的情况下必然产生巨大的自然推力。
如果不按照预先的设计方案来泄掉这部分巨大的自然推力,其产生的后果将是毁灭性的。
例如,前段时间某商业广场项目地库车位上方的热水管道瞬间脱离,管道支吊架等根本支撑不住瞬间的巨大推力。
许多非专业人员基本都会认为是施工技术差,或者认为施工方偷工减料,其实首先应该检查的是热水系统管道是否做了冷热补偿和合理的固定支架。
2、补偿器的分类在大面积的地库平面图中,如何做热水管道冷热补偿和合理的固定支架是有规律和技巧的。
但这些规律和技巧对于刚刚入职设计院的暖通设计师来说根本不掌握,或者说根本引起不了设计人员的注意。
在“三边工程”盛行的今天,出事的概率是非常高的。
首先,热水管道的托架和吊架跟固定支架并非一个意思。
只有把管道固定不动的吊架才叫“固定支架”,而普通支吊架是允许管道在其内顺着管道敷设方向自由移动的。
因为热膨胀产生多余的管道长度必须在此处让其释放、延申,吸收此多余长度的管件就是“补偿器”。
所以采暖系统中必须设置固定支架限定其只向一个预想的方向延申,而设置固定支架就必须配合使用补偿器用于吸收管道因温度增高引起膨胀造成的长度增大。
在本文中,我们首推“自然补偿器”。
管道的自然补偿是利用管道本身自然弯曲来补偿管道的热伸长。
自然补偿常用的有L形补偿器、Z字形补偿器及“几”字型补偿器。
与自然补偿相对应的是人工补偿器,常用的人工补偿器有波纹补偿器、套筒补偿器、球形补偿器、方形补偿器及填料式补偿器等。
自然补偿器相对于人工补偿器来说优点颇多,比如减少初投资、节省施工工期、系统安全不漏水以及补偿能力不会随着时间的推移而打折扣等。
当供回水系统为大口径管道时,人工煨弯也存在一定难度。
3、自然补偿器的设计步骤自然补偿器的设计步骤主要包括以下几个方面:1)确定管道的自由长度,即管道在不受限制的情况下,由于热胀冷缩而产生的长度变化。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
补偿器分析本文讨论降压式Buck DC‐DC 补偿器的选择和参数计算。
1. Type II 补偿器Type II 补偿器如图 1所示:U i (s)U o (s)图 1 Type II 补偿器其传递函数为:()()()()+==-⎛⎫++ ⎪+⎝⎭21122121121.1o c i sR C U s G s C C U s sR C C sR C C(1)在设计的时候,一般>>12C C ,公式(1)可以简化为:()()+≈-+2122111.1c sR C G s sR C sR C(2)传递函数的零点为ω=211z R C ;极点为原点和ω=221p R C 。
Type II 补偿器的波特如图 2所示,当频率在ωz – ωp 之间,幅度增益近似于常数2120log R R ⎛⎫⎪⎝⎭,最大角度提升(PhaseBoost)为90o 。
图 2 Type II 补偿器波特图如果将穿越频率ωc 设定为对数坐标中的中点,即ωωω+=log log log 2z pc ,可得:ω=c(3)定义K 因子(K‐Factor)为:=K (4)由(3)和(4),零极点ωz 、ωc 可写成:ωωωω⎧=⎪⎨⎪=⎩.c z p c K K (5)当ωω=c 时,补偿器有的相位为:()ϕω--=--111tan tan 90.o c c j K K(6)Type II 补偿器的最小相位为‐90o 。
定义相位提升(phase boost)θBoost 为:()θϕω--=--=-11190tan tan .o Boost c c j K K(7)由于存在着这样的反三角函数关系:--+=111tan tan 90.o K K(8)由(7)和(8),可得:tan .452o Boost K θ⎛⎫=+ ⎪⎝⎭(9)相位裕量为ϕm ,开环传递函数的相位为()vd c j ϕω,那么Boost θ为:()90.o Boost vd c m j θϕωϕ=--+(10)2. Type III 补偿器Type III 补偿器如图 3所示:U i U o (s)图 3 Type III 补偿器其传递函数为:()()()()()()()()21123122121331211.11o c i sR C s RR C U s G s C C U s sR C C sR sR C C C +++==-⎛⎫+++ ⎪+⎝⎭(11)在设计的时候,一般>>12C C 。
公式(1)可以简化为:()()()()()()2112311223311.11csR C s R R C G s sR C sR C sR C +++=++ (12)传递函数的零点为1211z R C ω≈,()21231z R R C ω=+;极点为原点,1221p R C ω=,2331p R C ω=。
Type III 补偿器的波特如图 4所示,当频率在ωz1 – ωz2之间,幅度增益近似于常数2120log R R ⎛⎫⎪⎝⎭;当频率在ωp1 – ωp2之间,幅度增益近似于常数132320log R R R R ⎛⎫+ ⎪⎝⎭,最大角度提升(Phase Boost)为180o 。
ω(rad/s)ω(rad/s)Gain(dB)Phase20log(R 2/R 1‐9090o20log(R 2/R 3图 4 Type III 补偿器波特图为了进一步简化Type III 设计,我们设定两个原(极)点频率相隔很近,即:12z z z ωωω≈=,12p p p ωωω≈=。
在这种假定下,Type III 补偿器的近似波特图为:Gain(dB)Phase20log(R 2/R 1‐90o90o20log(R 2/R 3图 5 Type III 补偿器简化波特图类似的,将穿越频率ωc 设定为对数坐标中的中点,即ωωω+=log log log 2z pc ,可得:ω=c(13)定义K 因子(K‐Factor)为:.pzK ωω=(14)由(13)和(14),零极点ωz 、ωp 可写成:.zpc ωω⎧=⎪⎨⎪=⎩ (15)当ωω=c 时,补偿器有的相位为:()112tan 2tan 90.o c c j ϕω--=-- (16)相位提升(phase boost)θBoost 为:()11902tan 2tan o Boost c c j θϕω--=--=- (17)由(17)和(8),可得:2tan .454o BoostK θ⎛⎫=+⎪⎝⎭(18)Type III 补偿器在ωc 处的幅度增益为:121.c c G R C ω=(19)同理,Boost θ为:()90.o Boost vd c m j θϕωϕ=--+(20)3. 如何选择补偿器i.确定开环传递函数补偿器的选择由需要控制的对象决定,这里以Buck 为例:+-V in +-v o图 6 Buck DC ‐DC 电路其小信号传递函数为:()()()()()+==⎡⎤+++++++⎣⎦22221211.in o o vd o o o o sCr V R V s G s d R r R r R r s R r C L Cr s LC (21)假设1O R r 、2O R r ,可将(21)简化为:()()22121.1in vd o sCr V G s L r C r C s s LC R +≈⎡⎤++++⎢⎥⎣⎦(22)显然,Buck 传递函数有一个由输出电容和其等效串联电阻ESR 决定的零点ωvd_z :_21.vd z Cr ω=(23)将s j ω=代入(22)的分母,()()()2_1_12__2112.vd p vd p vd p vd p oL G j j r r C R u j u ωωωωωωως⎡⎤⎛⎫⎡⎤⎢⎥=-+++ ⎪⎢⎥⎪⎢⎥⎣⎦⎝⎭⎣⎦=-+ (24)其中_vd p ω=。
(24)的幅度和相位分别为: ()()()()24210120log 10log 12.40log 1u G j u u u u ωςς⎧⎡⎤=-+=⎨⎣⎦⎩ (25)()112012tan .18011G o u u j u u ςϕω-⎧==⎨--⎩ (26)一般来说,__vd p vd z ωω<,则Buck 传递函数的波特图为:ω(rad/s)ω(rad/s)Gain(dB)Phase20log(V in ‐180o‐90o图 7 Buck 传递函数的波特图ii. 确定穿越频率ωc穿越频率越高,系统的响应速度越快,但是对开关噪声的衰减降低。
同时根据奈奎斯特采样定理,穿越频率ωc 必须小于开关频率ωs 的一半。
在实际设计中ωc 一般取ωs 的1/5到1/10。
iii.系统稳定条件闭环传递函数在ωc 的幅度增益为0dB ,斜率为‐20dB/dec 。
相位裕量至少45o 以上。
iv.不同条件下的补偿器选择条件A :__2vd p vd z c s ωωωω<<<如图 7所示,Buck 传递函数在ωc 附近的幅度斜率为‐20dB/dec 。
为了让闭环传递函数的幅度斜率为‐20dB/dec ,补偿器的幅度斜率应当为0。
由图 2所示,可以采用Type II 补偿器。
条件B :__vd p c vd z s ωωωω<<<如图 7所示,Buck 传递函数在ωc 附近的幅度斜率为‐40dB/dec 。
为了让闭环传递函数的幅度斜率为‐20dB/dec ,补偿器的幅度斜率应当为+20dB/dec 。
由图 5所示,可以采用Type III 补偿器。
条件C :__vd p c vd z s ωωωω<<< 同条件B ,应当选用Type III 补偿器。
4. 控制电路设计流程i.确定穿越频率ωc理论上,穿越频率ωc 应小于Buck 开关频率ωs 的一半。
实际应用中,ωω<5c s 。
ii. 求解开环传递函数在穿越频率处的幅度增益()ω20log vd c G j 和相位()vd c j ϕω。
iii.确定补偿器增益补偿器的增益应为()()-20log 20log vd c PWM G j V ω+。
其中V PWM 为PWM 的最大振幅。
iv.确定开环传递函数相位裕量一般将相位裕量ϕm 至少设置为45o 。
v.计算K 值根据(9)和(10),或者(18)和(20),计算K 值 vi.计算电阻、电容值如果先确定一个电阻值,比如R 1,那么其他参数也可以确定了。