三角锁近似平差程序
航道测量小三角锁的精度估算探讨

航道测量小三角锁的精度估算探讨提要:测量控制点的精度对于工程用地形图的测绘及施工放样的质量保证至关重要,对航道工程同样是不可忽视的技术问题。
本文试图从最小二乘法理论出发,针对常用的航道测量小三角锁的规划布网图形,选择适当的路线推导出估算点位误差的公式,并编制专用的微型计算机程序。
文中采用实测资料对近似平差成果进行了精度估计的探讨,作为进一步分析的参考。
关键词精度;三角锁;航道1基本工作原理在内河航道整治工程测量中,常用的测量控制网布设形式是两极小三角锁(5”级10”级),其控制点主要满足航道图测绘及局部地区如港口码头与重要航道地段工程测量的需要。
习惯作法是沿河道两侧布设控制点,构成带状的三角控制网。
在非独立布网区,三角锁的一端需要两个已知起始坐标点(国家等级控制点),或在独立布网区,需假定一个起始原点为已知,测定一条起始边的方位。
为提高精度,在锁的两端测定两条基线。
这种布网形式简便,覆盖面积较大,精度均匀,且工效较高,其特点适合于中小航道及港口施工测量。
平差计算也很方便,其平差条件一是三角形图形条件,按三分之一配赋角度闭合差;二是两端基线条件的平差,对所有观测角分别算出两次改正数,迭加起来得到平差角,最后推算各控制点的坐标。
实用上为避免解算法方程式,可简化计算,将基线闭合差按等权平均分配到两个传距角(如附图所示每个三角形的a、b角)上,对间隔角C只加第一次三角形条件的改正。
这也就是分组平差的简化解法,即近似平差法。
2点位精度的估算方法测量控制点的点位精度就是经平差后得到的各个控制点的平面坐标(X,Y),相对于起算点而言的点位移量(即点位误差),显然这对于保证施工质量更有实际意义。
要推算出每个点的点位误差(设为Mx,My),可以根据误差传播定律,找出坐标与观测值(角)之间的函数关系,再经线性化处理后,逐点进行推算。
对于航道小三角锁的布网图形,只要选择适当的推算路线,可使点位误差的计算公式更有规律,便于直接转化为程序语言上机运算。
水文普通测量规范

水文普通测量规范中华人民共和国行业标准SL 58-93水文普通测量规范Technical standard for general geodesic survey in hydrology 1993-12-10发布1994-01-01实施中华人民共和国水利部发布主编单位:水利部水文司批准部门:中华人民共和国水利部中华人民共和国水利部关于发布《水文普通测量规范》SL58-93的通知水文[1993]587号根据原水利电力部1986年标准制修订计划,由水利部水文司主持,黑龙江省水文总站主编的《水文普通测量规范》,经审定,现正式批准为水利水电行业标准,并予以发布.该规范编号为-93,自一九九四年一月一日起实施.该规范由水利部水文司负责解释.各单位在实施中发现问题,请及时函告主编单位及部水文司.该规范由水利电力出版社出版发行.一九九三年十二月十日目次1总则2水准测量3地形测量4断面测量附录A水尺零点高程测量记载表与填制说明附录B断面测量记载表附加说明1总则1.0.1为统一水文普通测量中水准测量,地形测量和断面测量的技术标准,特制定本规范.1.0.2本规范适用于水文站网建设,水文测验,水文调查的三,四,五等水准测量,水尺零点高程测量,河道断面测量和限额以下的地形测量.1.0.3水文普通测量的精度要求,应符合下列规定.(1)长距离水准测量路线最弱点的高程中误差允许值为±40mm;水文测站内的各水准点联测,比降观测的高程测量路线和水尺零点高程测量最弱点的高程中误差允许值为±10mm.(2)平面控制测量最低一级图根网最弱边的相对边长中误差不得超过1/1000.(3)地形图内地物点的点位中误差不得大于图上0.8mm,困难地区亦不得大于1.0mm;等高线插求点高程中误差的绝对值,在平地,丘陵地不得大于1/2基本等高距,山地不得大于1个基本等高距.(4)断面测量的距离控制桩间相对距离中误差不得大于1/500.1.0.4水文测站应使用冻结基面或测站基面.有条件的水文测站应与国家高程系统接测.每站应使用三个基本水准点构成的高程自校系统.1.0.5各项测量的原始记录应现场记载,不得涂改.各项测绘成果应及时进行整理,分类归档,基本水准点和高程自校系统的测量成果应长期保存.1.0.6永久性测量标志应建立位置图,构造图与说明表等档案资料.对测量标志应按国务院《测量标志保护条例》进行保护.1.0.7采用先进测量仪器和新测绘技术时,精度不得低于本规范要求.52水准测量2.1一般规定2.1.1高程引测,地形测量中高程控制水准测量的等级,应执行本规范的有关规定.2.1.2三等水准路线的支线长度,应不大于45km.在两个二等水准点之间布设三等附合路线,其长度应不大于180km;环线周长应不大于300km;测站水准点联测和比降观测高程测量的路线长度应不大于2.8km.2.1.3四等水准路线的支线长度,应不大于15km,在两高级点间布设的附合路线长度应不大于65km;测站水准点联测和比降观测高程测量的路线长度应不大于1km.2.1.4五等水准路线的支线长度,应不大于4km.在高级点间布设的附合路线长度应不大于16km;当用于基本等高距为0.2m的高程控制测量时,支线长度应不大于1km;附合路线长度应不大于4km.2.1.5当水准路线长度大于20km时,应每隔10km左右分一测段,在测段的端点设置或选定基本上相当于校核水准点标准的固定点.2.1.6三,四等水准测量,应采用不低于国内水准仪系列的S3级水准仪,水尺零点高程的测量一般应使用S3级水准仪.五等水准测量可使用S10级水准仪. 2.1.7水准标尺应采用双面水准尺.如因条件限制,可用单面水准尺按一镜双高法施测,不得使用塔尺或折尺.2.1.8水准测量在每仪器站的允许视线长度,前后视距不等差,应符合表2.1.8规定,其视线高度要求三丝能读数.2.1.9水准测量仪器站观测限差应符合表2.1.9的规定.表表表2.1.9测高差之差限差相同.2.1.10往返测量高差不符值,路线,环闭合差限差应符合表72.1.10规定.环由不同等级路线构成时,环闭合差的限差应按各等级路线长度分别计算,然后取其平方和的平方根为限差.2.1.11水准测量成果超限时,应重测.若在本站检查发现后应立即重测,若迁站后才检查发现,则应从水准点或符合限差要求的测段或间歇点开始重测.2.1.12地形高程测量及长距离引测所用水准仪,水准尺,应在使用前进行相应等级的全面检验与校正.在使用中应经常进行水准仪圆水准气泡和i角的检验与校正,i角不得大于20″.水尺零点,一般高程测量等常用水准仪,每年应进行不少于1次的水准仪圆水准气泡和i角的检验与校正.水准尺的米间隔平均真长与名义长之差,线条式因瓦水准尺不得大于0.15mm,木质标尺不得大于0.5mm. 2.1.13地形高程控制及长距离引测的水准测量,应符合下列要求.(1)安置水准仪三角架时,应使其中两脚与水准路线的方向平行,第三脚轮换置于路线方向的左右侧.(2)除路线拐弯处外,每测点上仪器和前后视标尺的三个位置,应接近于一条直线.(3)同一仪器站上测量时,不得两次调焦,转动仪器的倾斜螺旋和测微鼓时,其最后旋转方向应为旋进.使用自动安平水准仪时,相邻站应交替对准前后视调平仪器.(4)每一测段的往测和返测,其仪器站数应为偶数,若为奇数时应加入标尺零点差改正.由往测转向返测时,两标尺必须互换位置,而往测第一个测站上当作前视的水准尺,在返测第一个测站上它应该当作后视水准尺,并应重新安置仪器.(5)工作间歇时,应选择两个坚实可靠的固定点做为间歇点,进行双测.在间歇点上做上标记,间歇后应进行检测.2.2水准点和标石设置2.2.1水文测站的水准点分基本和校核两种.2.2.2水文站应在不同位置设置三个基本水准点,其中一个水准点设置明标,二个设置暗标.基本水准点相互间距离以300~500m为宜.测站附近设有国家水准点时,可设置一个基本水准点.2.2.3基本水准点应设置在水文测站附近历年最高洪水位以上或堤防背河侧高处,能保证水准点稳定又便于引测的地方.2.2.4在各水位观测断面附近可设置校核水准点,其位置和数量应满足进行水尺零点高程测量时,平坦地区的仪器站数不多于6站,不平坦地区的仪器站数不多于11站的要求.2.2.5水准点设置后,应逐一编号.以后无论其高程是否变动,都不得改变其编号,必要时可加辅助编号.2.2.6基本水准点标石的埋设应符合中华人民共和国国家标准(GBJ138-90)的规定.校核水准点标石埋设可参照基本水准点要求适当放宽.2.3三,四,五等水准测量2.3.1三等水准测量采用中丝读数法,进行往返观测.当使用有光学测微器的水准仪和线条式因瓦水准尺进行观测时,也可采用光学测微法进行单程双转点观测,观测程序应为"后,前,前,后".2.3.2四等水准测量采用中丝读数法.当两端点为已知高程点或自成闭合环时,可只进行单程测量.水准支线必须进行往返观测或单程双转点观测,观测程序应为"后,前,前,后"或"后,后,前,前".2.3.3五等水准测量采用中丝读数法.附合或环形闭合路线用单程观测.水准支线应进行往返观测,在困难条件下,也可进行单程双测.2.3.4采用双面水准尺时,中丝读数法要求仪器安平后,望远镜绕垂直轴旋转时,符合水准气泡两端影像分离不大于1cm.采用单面水准尺返测时,变换仪器的高度应不小于10cm.2.3.5光学测微法的仪器安平同第2.3.4条要求,但照准水准尺基本分划时,符合水准气泡两端影像分离应不大于2mm,中丝读数应读至0.1mm.2.3.6采用补偿式自动安平水准仪进行水准测量时,先将水准仪概略整平,即可按一般水准仪观测顺序进行测量.2.3.7三,四等水准测量应读记至1mm,计算平均高差取至0.5mm,五等均记至毫米.用测微法时,中丝读数计算高程平均高差,均取至0.1mm.各等级水准测量的视距和视距差取至0.1m.2.3.8水准测量中应及时检查每一仪器站的观测结果,符合表2.1.8和表2.1.9的规定时,方可迁至下仪器站.2.3.9每测完一个测段,应计算往返测或单程双转点左,右路线测量的高差,其不符值应满足表2.1.10规定,当超出规定时,应按下列要求重测和计算高差结果.(1)对可靠程度小的往测或返测向进行单程重测.如果重测的单程高差与同一方向原测高差的不符值符合限差,且其平均数与反方向的原测高差亦符合限差,则取其平均数作为该单程的高差结果.(2)若重测的高差与同方向的原测高差不符值超出限差,而重测的单程高差与反方向原测高差没有超出限差,则用重测的单程高差与反方向原测单程高差计算闭合差.(3)若该单程重测后与原往,返测的单程高差计算结果均超出限差,则重测另一单程,至符合限差要求为止.(4)用单程双转点左,右路线的测法时,可只重测一个单程单线,并与原测结果中符合限差的一个左或右单线取平均数值.(5)如果重测结果与原测的左右线结果比较均符合限差,则取三次单线的结果平均值.(6)当重测的结果与原测两个单线结果均超限差,应分析原因再测一个单程单线,至符合限差要求为止.2.3.10 附合,闭合,支线水准路线闭合差,应分别按下列公式计算. 附合()∑--=?u d H H h h (2.3.10-1) 闭合∑=?h h (2.3.10-2) 支线∑∑-=cthhh (2.3.10-3)式中△h ---高差闭合差,m ;∑h ---各测段高差的代数和,m ;∑h t ,∑h c ---路线上各测站的往测,返测的高差总和,m ; H d ---路线上终了已知水准点的高程,m ;H u ---路线上起始已知水准点的高程,m.2.3.11 附合,闭合,支线水准路线闭合差的改正,应按测段长度或仪器站数的比例进行分配,按式(2.3.11-1),式(2.3.11-2)进行路线长度和仪器站数的闭合差改正数计算.h LL ii ?-=δ (2.3.11-1) h nn ii ?-=δ (2.3.11-2) 式中δi ---某一测段上路线长度,仪器站数闭合差改正数,m ; L i ---某一测段中前,后视距离的和,m ; L ---水准路线的总长度,m ; n i ---某一测段中的仪器站数; n ---路线中总的仪器站数. 2.4 跨河水准测量2.4.1 河宽小于允许视线长度可直接跨河测量;当河宽大于允许视线长度,但有桥梁可以利用时,可通过桥面进行水准测量.2.4.2 跨河两岸测点间的水平视线距水面的高度要大致相等.当跨河视线长度在300m 以内时,视线高度至水面距离不得小于2m ,视线长度大于300m 时,视线高度至水面距离不得小于3m.2.4.3 跨河两岸安置仪器及标尺的位置,使其能构成平行四边形,等腰梯形或Z 字形布置为宜.跨河视线长度力求相等,岸上视线长度不得短于10m ,且两岸视线长度应相等.使用一台仪器观测时,宜采用Z 字形式.2.4.4 标尺点应牢固.需设置木桩时,木桩顶面直径宜大于10cm ,入土长度应满足标尺点牢固的要求,桩顶高于地面10cm 以上,并钉上圆帽钉.2.4.5按2.4.3条布设跨河测量场地时,应在距跨河点300m以内,设立临时水准点.2.4.6视线长度在300m以内,跨河水准测量应观测两个测回,两个测回的高差不符值,三等水准应不超出8mm,四等水准应不超出16mm,超出限差时,应分析原因,按第2.3.9条要求重测.2.4.7当视线长度在300m以内,跨越水流平缓的河流,静水湖泊,池塘等的四等水准测量,可采用静水传递高程法进行二次观测.两结果不符值,应不超过±20L mm。
测量学试卷及答案
测量学试卷及答案一、填空题(一)测量学基础知识(1-120题)1. 地面点到假定水准面铅垂距离称为该点的相对高程。
2. 通过平均海水面的水准面称为大地水准面。
3. 测量工作的基本内容是高程测量角度测量距离测量 .4. 测量使用的平面直角坐标是以两条互相垂直线的交点为坐标原点,南北方向的纵轴为x轴,以东西方向的横轴为y轴。
5. 地面点位若用地理坐标表示,应为经度纬度和绝对高程。
6. 地面两点间高程之差,称为该两点间的高差。
7. 在测量中,将地表面当平面对待,指的是在 100平方千米范围内时,距离测量数据不至于影响测量成果的精度。
8. 测量学的分类,大致可分为大地测量学普通测量学摄影测量学工程测量学。
9. 地球是一个旋转的椭球体,如果把它看作圆球,其半径的概值为 6371 km。
10. 我国的珠穆朗玛峰顶的绝对高程为 8848.13 m。
11. 地面点的经度为该点的子午面与首子午面所夹的二面角。
12. 地面点的纬度为该点的铅垂线与赤道平面所组成的角度。
13. 测量工作的程序是从整体到局部先控制后碎部。
14. 测量学的任务是测绘和测设。
15. 直线定向的标准方向有真子午线方向磁子午线方向坐标纵轴方向。
16. 由坐标纵轴线北端方向顺时针转到测线的水平夹角为直线的坐标方位角。
17.距离丈量的相对误差的公式为。
18. 坐标方位角的取值范围是 0?或360? 。
19. 确定直线方向的工作称为直线定向,用目估法或经纬仪法把许多点标定在某一已知直线上的工作为直线定线。
20. 距离丈量是用相对误差来衡量其精度的,该误差是用分子为 1 的分数形式来表示。
21. 用平量法丈量距离的三个基本要求是尺子要拉平标杆要立直且定线要直对点投点和读数要准确。
22. 直线的象限角是指直线与标准方向的北端或南端所夹的锐角,并要标注所在象限。
23. 某点磁偏角为该点的磁北方向与该点的真北方向的夹角。
24. 某直线的方位角与该直线的反方位角相差 180? 。
fx-4850P_单一闭附合图根导线近似平差程序

按键
1 4 -1 237 59 30 2507.693 1215.632 2166.741
说明
显示程序标题 输入 0 为闭合导线 输入导线未知点数 输入 A 点的 x 坐标 输入 A 点的 y 坐标 输入 B 点的 x 坐标 输入 B 点的 y 坐标 显示 A→B 边长 显示 A→B 边方位角 显示 B→A 边方位角 提示输入 B 点角度与平距 输入 B 点水平角 输入 B 点的平距 提示输入 1 点角度与平距 输入 1 点水平角 输入 1 点的平距 提示输入 2 点角度与平距 输入 2 点水平角 输入 2 点的平距 提示输入 3 点角度与平距 输入 3 点水平角 输入 3 点的平距 输入最后一个水平角 显示以角度闭合差(秒) 显示分配角度闭合差后的检核结果 显示 x 坐标增量闭合差 显示 y 坐标增量闭合差 显示导线全长相对闭合差分母 显示第 1 点的坐标计算结果 显示第 1 点的 x 坐标 显示第 1 点的 y 坐标 显示第 2 点的坐标计算结果 显示第 2 点的 x 坐标 显示第 2 点的 y 坐标 显示第 3 点的坐标计算结果 显示第 3 点的 x 坐标 显示第 3 点的 y 坐标 显示检核点的坐标计算结果 显示检核点的 x 坐标 显示检核点的 y 坐标 显示检核点的 x 坐标差 显示检核点的 y 坐标差 程序运行结束显示
Deg:Fix 3
设置十进制度为单位
A"XA(m), 0 TO BEAR A B(Deg)="
输入 A 点 x 坐标或输入≤0 的数值
A>0 B"YA(m)=": R"BEAR A B(Deg)=" A>0 时输入 A 点 y 坐标,否则输入 A→B 方位角
C"XB(m)=":D"YB(m)="
平差计算的基本原理和方法

平差计算的基本原理和方法平差计算是一种广泛应用于测量和工程领域的数学方法,用于解决数据观测值中的误差和偏差问题。
平差计算的基本原理是通过最小二乘法,以最小化观测值与计算值之间的残差平方和来确定最优解。
本文将介绍平差计算的基本原理和常用方法。
一、平差的概念和意义平差是指将不准确或不完整的观测数据进行修正和处理,使其达到最优解或近似最优解的过程。
在测量和工程领域中,由于各种误差和偏差的存在,观测数据往往具有一定的不确定性,因此需要进行平差计算来提高数据的精度和可靠性。
平差计算的结果可以用来进行工程设计、地图测绘、导航定位等各种应用。
二、平差计算的基本原理平差计算的基本原理是基于最小二乘法。
最小二乘法的核心思想是将观测值与计算值之间的残差平方和最小化,通过调整未知量的值来逼近最优解。
残差是指观测值与计算值之间的差异,而平差计算的目标就是使这些差异最小化。
平差计算的基本模型可以表示为以下方程组:A * x = L其中,A为系数矩阵,x为未知量向量,L为观测值向量。
通过解这个方程组,可以求得最优的未知量估计值x。
最小二乘法的优点是可以利用观测数据中的权重信息,将准确性较高的观测数据给予更大的权重,进一步提高计算结果的准确性。
此外,最小二乘法还具有数学上的良好性质,可以通过数学推导和求解得到闭式解,而不需要采用迭代方法。
三、平差计算的常用方法1. 三角形平差法三角形平差法是一种常用的平差计算方法,适用于测量角度和距离的观测数据。
该方法基于三角形的相似性原理,通过解析几何和三角函数等方法,将观测数据转化为方程组,并利用最小二乘法求解未知量。
2. 存储器平差法存储器平差法是一种适用于大规模观测数据的平差计算方法。
该方法通过将观测值按照一定规律存储在存储器中,然后通过循环迭代的方式逐步修正观测值和未知量的估计值,直到最终收敛。
3. 参数平差法参数平差法是一种广泛应用于工程测量领域的平差计算方法。
该方法将未知量表示为参数的形式,并利用最小二乘法求解最优的参数估计值。
二等水准测量及科傻平差操作教程
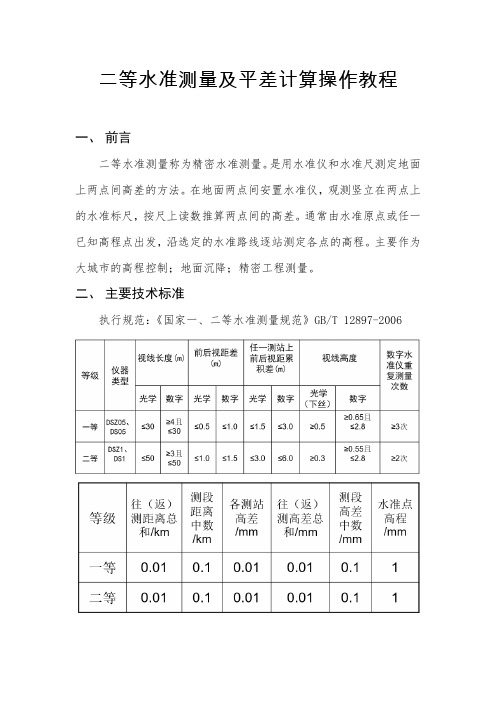
二等水准测量及平差计算操作教程一、前言二等水准测量称为精密水准测量。
是用水准仪和水准尺测定地面上两点间高差的方法。
在地面两点间安置水准仪,观测竖立在两点上的水准标尺,按尺上读数推算两点间的高差。
通常由水准原点或任一已知高程点出发,沿选定的水准路线逐站测定各点的高程。
主要作为大城市的高程控制;地面沉降;精密工程测量。
二、主要技术标准执行规范:《国家一、二等水准测量规范》GB/T 12897-2006三、主要内容作业流程图1、首先进行现场地形和控制点勘察,查看控制点具体位置并记录(可在奥维地图上标记),查看是否有控制点被破坏,周围地形是否便于测量。
2、勘察完成后,根据施工需求按规范要求埋设加密点,加密点要埋设在坚实牢固的土质上,防止后期沉降。
3、根据勘察情况,制定测量路线,尽量选择距离最短、高差较小、土质坚硬的线路。
4、设置测量参数开始测量,以徕卡LS10为例:4.1测量前首先校验仪器和水准尺零点误差,测量时仪器水准气泡对中整平,然后在主菜单中选择工具-区域设置-单位设置,距离单位米,高程位数为5位,距离位数为3位,温度℃。
4.2在主菜单中选择工具-区域设置-模式设置,模式有五种:单次、平均、平均S、中值、跟踪。
选择平均。
4.3设置作业:在主菜单界面选择程序-线路测量进入配置界面,点击设置作业。
新建一个作业,输入作业名称,作业员名称。
4.4设置限差:按照二等水准标准设置限差,最小视距为3米(仪器到水准尺的距离要大于3米),最大视距为50米,前后视距差为1.5米(后视水准尺到仪器的距离与前视水准尺到仪器的距离之差不大于1.5米),累计视距差为6米(本次的前后视距差+往次所有的前后视距差之和不大于6米),最高视线2.8米(仪器望远镜十字丝横丝与水准尺水平视线不超过2.8米,2米的水准尺则输入1.8米),最低视线0.55米),B1-F1/B2-F2 0.00030m(第一次后视读数-前视读数与第二次后视读数-前视读数不大于0.3mm)。
控制测量中三角锁推算元素的精度估算
§2.3 三角锁推算元素的精度估算在1.1.2小节中已经提到,控制测量工作的第一阶段就是控制网的设计阶段。
论述控制网的精度是否能满足需要是技术设计报告的主要内容之一。
虽然对于评定控制网的优劣、费用的高低也是一项重要的指标,但是,通常首先考虑的是精度,只有在精度指标满足要求的情况下,才考虑选择费用较低廉的布设方案。
本节着重介绍估算三角锁边长精度的方法。
近20年来,随着电子计算机的广泛应用,以近代平差理论为基础的控制网优化设计理论获得了迅速地发展。
例如,仅在表达控制网质量的指标方面,无论在广度和深度上,均非过去所能比。
2.3.1 精度估算的目的和方法精度估算的目的是推求控制网中边长、方位角或点位坐标等的中误差,它们都是观测量平差值的函数,统称为推算元素。
估算的方法有两种。
1.公式估算法此法是针对某一类网形导出计算某种推算元素(例如最弱边长中误差)的普遍公式。
由于这种推算过程通常相当复杂,需经过许多简化才能得出有价值的实用公式,所以得出的结果都是近似的。
而对另外一些推算元素,则难以得出有实用意义的公式。
公式估算法的好处是,不仅能用于定量地估算精度值,而且能定性地表达出各主要因素对最后精度的影响,从而为网的设计提供有用的参考。
推导估算公式的方法以最小二乘法中条件分组平差的精度计算公式为依据,现列出公式如下。
设控制网满足下列两组条件方程式⎪⎪⎭⎪⎪⎬⎫=++++=++++=++++000221122112211r n n b n n a n n w v r v r v r w v b v b v b w v a v a v a(Ⅰ)⎭⎬⎫=++++=++++0022112211βαβββαααw v v v w v v v n n n n (Ⅱ)推算元素F 是观测元素平差值的函数,其一般形式为),,,(2211n n v l v l v l F +++= ϕ式中,i l 为观测值,i P 为其权,i v 为其相应的改正数。
光束法空三加密
dX dY dZ 0
考虑控制 平高控制点 点本身误
差 平面控制点
高程控制点
dX vx
p平
dY v y p平
dZ vz
p高
dX vx p平 dY v y p平 dZ vz p高
平高控制点
dX vx
p平
dY v y p平
dZ vz
p高
三、平差计算
• 整体平差计算:解算每张像片外方位元素和加密点的地面坐 标 1)、给定每张像片的外方位元素的近似值,和所有加密点
a14 a24
a15 a25
a16 a26
dZS
d d
a11 a21
a12 a22
a13 a23
d d
Y Z
lx ly
式中:
a11
f H
a21 0
a12 0
f a22 H
x a13 H
y a23 H
x2
xy
a14 ( f f ) a24 f
计
算
6、用新外方位元素,采用多片前方交会法,计算各连接点的新地面坐标。
步
改正数小于给定限差否?
否
骤
是
7、采用多片前方交会法,计算各加密点的地面坐标。
三、两类未知数的交替趋近法
1、区域网概算,得到各外方位元素和加密点的近似值
2、将加密点的近似值作为真值,按最小二乘原理计算外 方位元素的改正数,并得到新的外方位元素近似值。
x f1(x, y) y f2 (x, y)
如何确定这个函数?
[五]利用附加参数的自检校区域网平差
一个典型系统误差模型:
x b1x b2 y b3(2x2 4b2 / 3) b4xy b5( y2 2b2 / 3)
Excel环境中控制测量三角网平差及坐标计算
收稿日期:2003 03 25作者简介:余梁蜀(1964 ),女,四川重庆人,副教授,长期从事工程建设管理与工程测量的教学与科研工作.第37卷第1期2004年2月武汉大学学报(工学版)Engineering Journal of Wuhan U niversity Vol.37No.1Feb.2004文章编号:1671 8844(2004)01 063 05Excel 环境中控制测量三角网平差及坐标计算余梁蜀1,张宗孝2,马 斌2,孟文杰2(1.西安交通大学,陕西西安 710049; 2.西安理工大学,陕西西安 710048)摘要:将Excel 的表格特性和测量计算传统的列表格式结合起来进行控制测量三角网的平差和坐标计算,有效地克服了Fortr an 或Basic 语言编程后台计算、外业资料和已知条件的输入不直观、出现错误比较难检查的缺陷.充分地利用Ex cel 强大的功能和良好的人机交互对话界面,方便地进行数据处理和函数运算,迅速的制作复杂图表的特性,将整个计算过程展示在前台,易操作、易修改、透明度高,是控制测量计算的有效方法之一.关键词:电子表格;控制测量;三角点;坐标中图分类号:T B22 文献标识码:AArea triangulation adjustment correction and coordinate calculationof control surveying based on Excel platformYU Liang shu 1,ZHANG Zong x iao 2,MA Bin 2,MENG Wen jie 2(1.Xi an Jiaotong University ,X i an 710049,China; 2.Xi an U niversity of T echnolog y,Xi an 710048,China)Abstract:A method for area triangulation adjustment correction and coordinate calculation of control survey ing w ith combining electronic form of Excel and calculation form of tradition is put forw ard.This method overcomes the shortcom ings of calculation procedure using the Fortran and Basic,such as computation in background,inputting files indirectly,finding m istakes difficultly,etc..T his method based on Excel has the follow ing advantages:the computation process is of complete man machine interaction and dialogue process;convenient in data processing;quickly to make sophisticated diag ram and form;computation on the stage;convenient in operation;conveniently to modify ;hig her in transparency.So the method is one of efficient methods of calculation of triangulation control surveying.Key words:electronic form;control surveying;trig point ;coordinate 当测量区域为带状时,平面控制测量通常采用三角网控制.三角网的平差及坐标计算,工作量大,程序繁琐,计算精度要求高;特别是当控制网中三角点数较多时,计算更加复杂,如果借助计算器手算,则计算时间长,且容易出错;如果用高级语言如Fortran 或Basic 编程计算,虽然计算比手算快,但由于计算是在后台进行,外业资料和已知条件的输入不直观,出现错误比较难检查.Microsoft Ex cel 是微软公司在Windows 操作系统中开发的一种通用软件[1],它具有强大的功能和良好的人机交互对话界面,可以方便地进行数据处理和函数运算,而且能够迅速地制作复杂的图表,计算过程展示在前台,易操作、易修改、透明度高,在工程测量中利用它进行三角形网的计算非常方便[2].1 三角网计算模型和程序步骤本文针对两端有基线的单三角锁的平差及坐标计算编制Ex cel 程序,中点多边形、线形三角锁等其他形式的三角网可仿照编制.三角网计算的目的是根据多余条件进行平差计算、推算出各三角点的坐标值.外业测量工作完成后,获得三角网中各角的角值a i,b i,c i,两端基线的边长d0,d n,一条边的方位角 AB和一个点的坐标X A,Y A,并绘制计算简图(计算简图、外业资料和起算数据列在界面1中).两端有基线的单三角锁的平差及坐标计算程序为(1)按三角形图形条件对角值a i,b i,c i进行第一次平差改正,求第一次改正后的角值a i,b i,c i.a i=a i-fi /3,b i=b i-fi/3,c i=c i-fi/3(1)式中:fi 为三角形角度闭合差,fi=a i+b i+c i-180!.(2)按三角锁基线条件对角值a i,b i,c i进行第二次平差改正,求第二次改正后的角值a∀i,b∀i,c∀i.a∀i=a i-v a,b∀i=b i+v b,c∀i=c i(2)式中:v a,v b为角度的第二次改正数,v a=-v b= -∀wd n(#ctg a+#ctg b);w为基线闭合差,w =d0∃sin a i∃sin b i-d n;∀为弧度与角度换算系数206265∀.(3)计算三角形各边的边长d ij.自d0开始用a∀i, b∀i,c∀i角值,及正弦定律推算各三角形边长,推算出终了基线的边长应与d n值相等,进行计算检核.(4)推算各边的方位角 ij.利用起算基线的方位角 0和各三角形的角值a∀i,b∀i,c∀i依次推算各边的方位角.(5)计算各边的坐标增量!X ij,!Y ij和三角点的坐标X i,Y i.计算式为!X ij=d ij cos ij,!Y i j=d i j sin ij(3)X j=X i+!X i j, Y j=Y i+!Y ij(4) 三角锁平差及各三角点坐标计算程序见图1.图1 三角锁平差及坐标计算程序以上计算相当繁杂,通过Excel列表和编写语句,可使计算过程简单明了,计算线路清晰.2 三角网Excel计算程序编制本文结合实例介绍三角网平差坐标计算Ex cel 程序编制方法.(1)外业资料和起算数据的输入.打开计算机,进入Excel界面(见界面1) Sheet1工作簿中(重命名为%平差表%),在相应单元格(Excel地址)输入各三角形编号、各三角点点名和各三角形角号、外业资料(a i,b i,c i,d0,d n)和起算数据( A B,X A,Y A)等.例如可分别在D6,E6, F6单元格中输入第&个三角形a1角值用度、分、秒值,同理输入各三角形各角值.测量外业观测时各内角值用度、分、秒表示,角值输入时也以度、分、秒分别占用不同单元格,而计算机计算时角度是以度运算.因此,首先将各角值化为度的形式.击活G6单元格,在公式编辑栏编辑语句G6=D6+E6/60+F6/3600,确定后即完成将度分秒形式表示的角值a1化为度,并存放入G6单元格中.随后击活G6,将鼠标移到其右下角%自动填充柄%黑十处,向下拖动鼠标复制G6语句,则将第&个三角形中c1,b1的角值也化为度的形式表达,并分别存入G7、G8单元格中.利用相对地址的原理[2],给G10单元格复制G6语句,将第∋个三角形中b2的角值化为度的形式,再击活G10,利用%自动填充柄%给G11、G12复制G10语句,将第∋个三角形中c2,b2的角值也化为度的形式.其他各三角形角度的转化与此相同.(2)计算三角形的内角和及第一次改正数f1.利用Excel的求和函数%Sum%就能方便地求出三角形内角和.在G9单元格中编写语句Sum(G6 (G8),即完成第&个三角形内角求和.该语句的含义是G6,G8单元格中的角度值求和,对于其他各三角形内角求和采用复制G9语句完成.在单元格H6中,编辑公式:-($G$9-180)/3,即对第&64武汉大学学报(工学版)200465 第1期余梁蜀等:Ex cel环境中控制测量三角网平差及坐标计算个三角形角度闭合差(fi=a i+b i+c i-180!)按反号平均平差的原则求得角值的改正数∀11(∀ij为三角形内角的第一次改正数,i为三角形编号、j为各三角形内角编号,例∀13表示第&个三角形、第3个角的改正数).然后击活H6,用%自动填充柄%复制H6语句,求得∀12,∀13.击活H6,单击%复制%按钮;击活H10,单击%粘贴%按钮,则得到语句-($G$9-180)/3,在公式编辑栏,移动光标改$G $9中行号9为13,即可得到∀21,用%自动填充柄%复制H10语句,求得∀22,∀23.其余的∀ij求法操作同上.(3)计算第一次改正后的角值a i,b i,c i.将原角值加上∀ij即为第一次改正后角值,在I6中,编辑公式I6=G6+H6,即完成计算第一次改正后的角值,其各角值的计算仍然采用复制I6语句的操作.(4)计算第二次改正数v a,v b.计算模型为式(2),首先需计算a i,b i,c i角的正弦值和余切值.在J6中编制语句%sin(I6)#/ 180)%.在K6中编制语句%(I6)#/180)/tan%.完成第&个三角形中角a1正弦值和余切值的计算.通过复制J6、K6的语句,完成其他各角正弦值和余切值的计算.在K26中编辑语句:%G26)J6) J10)~)J22/J8/J12/~J24-I26%计算基线闭合差;在K27中编辑语句:%-K26/J26/Sum(K6, K8,~,K24))180/#%计算角值第二次改正值v a =-v b.并分别在L6、L8中编辑引用语句%= K27%、%=-K27%,将第二次改正值存放入L6,L8, L10∗∗(5)第二次改正后的角值a∀i,b∀i,c∀i.由式(2)知,第二次改正后的角值a∀等于第一次改正后角值与第二次改正数之和.在M6中编辑语句%I6+L6%,即完成计算,其余各角只要采用复制M6语句即可.同时复制G9的求和函数,计算各三角形内角和应等于理论值180!,进行计算检核.(6)各边边长.运用正弦定理,计算三角形各边边长.首先运用%复制%、%粘贴%和%自动填充柄%给N6,N10∗∗及N7,N8,N11,N12∗∗单元格复制J6语句,计算第二次改正后角值的正弦函数值.在O8中编辑%=G26%语句,即连通引用存放在G26中的起算边边长值,在O6,O7中编辑公式%N6/N8)O8%、% N7/N8)O8%,即完成第一个三角形待求边d12和间隔边s13长度的计算.在O12中编辑%=O6%语句,即连通引用已计算出存放在O6中的第一个三角形待求边d12值(等于第二个三角形的已知边d21),在O10,O11中复制O6,O7语句,即完成第二个三角形待求边d22和间隔边s23长度的计算.相似操作可计算其余各三角形边长d ij.以上6步完成了三角锁平差与边长计算,在此基础上进行各控制点坐标计算.(7)三角锁各点坐标计算.单击工作簿%Sheet2%,掀开一页新工作簿(重命名为%三角坐标%)进行三角锁坐标计算,见界面2.由三角锁各点坐标计算模型式(3)、(4)知,坐标增量!X ij、!Y ij由边长d ij和方位角 ij计算得出,即引用Sheet3平差表的计算成果.在界面2C4单元格中语句%=平差表!H27%,表示将平差表H27单元格中起算基线的方位角值连通引用;C12单元格中语句%=平差表!O8%,表示将%平差表%O8单元格中起算基线的边长值连通引用;D5单元格中语句%=平差表!M6%,表示将平差表M6单元格中第一个三角形第二次改正后的角值连通引用;同理D12,E5,F5∗∗具有相似操作和相同作用.界面2第2行各单元格存放各三角形已知坐标点的点号(已知点&,表示已知点号归属&);第3行各单元格存放各三角形待求坐标点的点号(已知点∋,表示待求点号归属∋);第4行各单元格的语句是计算各三角形已知边的方位角 &,&;第5行各单元格的语句是连通引用平差表中各三角形第二次改正后的角值a∀i,c∀i;第6行各单元格的语句是计算各三角形待求边和间隔边的方位角 &,∋;第12行各单元格的语句是连通引用平差表中各边的边长d&,∋;第11、13行各单元格的语句分别计算待求边和间隔边的方位角 &,∋的余弦cos &,∋和正弦sin &,∋值.第10行和第14行分别计算各三角形待求边和间隔边的纵、横坐标增量!X&,∋,!Y&,∋.第9、15行逐个连通引用各三角形已知点的坐标X&,Y&.第8、16行分别计算各三角形待求点的坐标X∋,Y∋.第7、17行是各三角形中由两已知点(沿待求边和间隔边)计算出的待求点坐标的平均值X∋平,Y∋平.66武汉大学学报(工学版)2004(下转第76页)67第1期余梁蜀等:Ex cel 环境中控制测量三角网平差及坐标计算的效果也是令人满意的:图5表明误差能量模的降低,图6表明最大相对误差的大幅降低,从而说明在单元上最差的结果也是令人满意的.4 结语本文以八结点有限元网格为基础形成物理覆盖,以等参元形函数为权函数,用Lag rang e乘子法施加边界约束,采用两种不同的覆盖函数,实现了数值流形方法.这样,对曲边界的几何形状及位移边界条件的刻画较一般方式更为精确.本文利用此法对一个带孔板作了分析,借此研究了其绝对误差、相对误差以及收敛性能.结果表明,在采用数值流形方法后,求解精度提高,误差能量模降低了一个数量级还多,且对体积闭锁问题也提供了令人满意的解答.采用{1,r}覆盖函数基时,方程的规模较采用完全一阶近似函数减小了1/3,而即便求解近于不可压缩材料问题,精度仍有可靠保证,因而是一种比较理想的选择.当然,这一方法完全可以用于动力分析和大位移分析,或借鉴到其他相关问题的数值分析中.参考文献:[1] 石根华.数值流形方法与非连续性变形分析[M].裴觉民译.北京:清华大学出版社,1997.[2] 王水林.数值流形方法与裂纹扩展的模拟[D].武汉:中国科学院武汉岩土力学所,1998.[3] 王水林,葛修润.流形元方法在模拟裂纹扩展中的应用[J].岩石力学与工程学报,1997,16(5):405 410.[4] 蔡永昌,廖林灿,张湘伟.高精度四节点四边形流形单元[J].应用力学学报,2001,18(6):75 80.[5] 监凯维奇O C.有限元法(上册)[M].北京:科学出版社,1985.[6] Bely tschko T,Lu YY,Gu L.Element free Galer kinmethods[J].Int.J.numer.methods.eng.,1994(37):229 256.(上接第67页)在Excel环境中控制测量三角网平差及坐标计算的实例见文献[3,4].3 结语在Excel环境下,编制三角网坐标计算表,按照计算的逻辑关系由两个表(平差及边长计算表和坐标计算表)组成,它是计算机应用软件同工程应用的有效结合,具有以下特点[5,6].(1)格式化强.具有严格的先后顺序逻辑关系,每一步都具有固定的格式,层次清晰,一目了然.(2)透明度高.Ex cel的运算过程高度透明可见,其中大量采用了公式复制和引用;不但可以引用本表的内容,还可以引用其他表的内容,给计算带来了方便,同时能进行交互式的人机对话.(3)编制方便,易于掌握,有计算机基本知识的测量人员都可以使用本方法进行三角形网坐标计算.由此可见,在Ex cel环境下编制三角网坐标计算表,具有快速、准确、简单等特点,是工程计算的重要手段之一.参考文献:[1] 刘 晨,李 波,严晓敏.如何使用Excel[M].北京:机械工业出版社,1997.[2] 马 斌,余梁蜀,韩群柱,等.工程测量学实践指南[M].西安:西安地图出版社,2001.[3] 李守义,马 斌.工程造价[M].西安:陕西科学技术出版社,2001.[4] 马 斌,余梁蜀,黄自瑾.路桥工程[M].西安:西安地图出版社,2001.[5] 马 斌,余梁蜀.基于Ex cel的水利水电工程概(预)算编制方法[J].武汉大学学报(工学版),2001,34(4):45 52.[6] 余梁蜀,马 斌,张 毅,等.基于Excel的公路工程概(预)算编制方法[J].武汉大学学报(工学版),2002,35(6):98 103.76武汉大学学报(工学版)2004。
基于MATLAB的单三角锁严密平差程序设计
is=; 0= l %当待定点 为第 奇数个时 , 待 l=eo( ; OzrsO) r o = : f rilH 定点近似坐标的求法 ; 3 x( ( 1 ct 1 2 " x一)ct 1 2 " y fr j1 ; x ̄ i ) o (- , +O 2 o (一 , — o = : i 一 d( 1 i d( 3 - i a 1 y— ) 一) ' + ; i l j 0 fO ) = > f)ct ( 2 ) ct a2 肛  ̄= o 0- ,— o 0一 ’ i di 1- d 3 1 , 1 () 0 j 0 i; 6) 0 , = j es le y =0 1 c t1 2 "y —) o 0- 3) ) 一) o (一 , +6 2 ct 6 2 ) x - d( l y i d +
⑤计算法方程式 的系数及权的编程如下 :
l=2 6 6 .06 4 0 6 ; 3 0 ; o 0 2 48 2 7 9 4A= 6 0 ,
“ 2+ 1 _ ) 一 fi ct(- ,)ctOi2 ) f ̄ od1 2 ) od( ,) (= ( 3+ i - 1: y( y一 ) o ( 一’ a 1 ct o 2 ” y = (2 ct 1 2 y— ) o 0一 , + i i d( 3 ) i d 1 ( 2-( 1 i)- i ) - x一 ; 列 出误差方程 = —f ; x -x) ( ( x(f) i i f ) /i ( )由误 差方程系数 B和 自由项 l 3 组成法 y)y(fi ( y)f i i( - /) ed n 方程 N — : W 0,法方程 个数 等于参 数的个 数 t ; ed n
B =eo0 n n 2; Y zr *, ( ) s 2 +) 始化矩阵 B ; Y