单一闭合导线近似平差的步骤与公式培训讲学
闭合导线平差程序设计

闭合导线平差程序设计闭合导线平差程序设计1. 定义闭合导线平差是一种常用的野外测量数据处理方法,主要是对收集到的起点、中间点、终点等观测数据进行处理,以期获得精确的位置、距离等值。
2. 基本原理闭合导线平差是基于平差原理的实现,将测量起点和终点看作以相同的大小、方向的弯曲线片段组成的单一参数闭合线段进行处理,根据所取的测量观测值,以及观测变现的不确定性,经过合理的参数求解,以期尽可能准确的提取出距离、位置等变量。
3. 设计步骤利用闭合导线平差程序,实现起点和终点连接形成精确环形线段,需要包含以下几个步骤:(1) 输入测量数据:首先要搜集和输入测量数据,一般包括起点和终点的测角、距离、坐标以及各中间点的测角、距离、坐标等;(2)初始网值近似值:根据输入的测量数据,给定平差网的近似值,进行网格结构初始设置;(3)变量定义:确定变量类型,处理所有变量,根据不同的变量和变化范围,定义各种数学变量;(4)观测方程拟合:根据给定的变量,基于平差原理,拟合出符合条件及符合实际效果的观测方程;(5)历程和角度单位转换:完成测量数据的转换,将各中间点的测量数据转换为距离和角度绝对值,得到带符号角度,以方便后续数据处理;(6)主要的参数以及函数计算:根据已经获得的观测方程,求解出与之对应的函数及参数,以期获得所需要的精确结果;(7)几何和参数变换:根据主要参数和函数,进行变换和单位转换,获得をn换得整个线段的几何及参数关系;(8)最终结果输出:按照实际需求,输出最终结果,并将其保存进行下一步分析。
4. 程序优化闭合导线平差程序中有不少地方可以优化,以期获得更精准和更可靠的结果。
(1)近似值优化:数据输入时,给定的近似值尽可能的接近实际值,以期可以准确接近最终结果;(2)变量优化:确定变量类型时,按照不同改变范围和不确定性,尽可能让变量涵盖更广范围;(3)函数优化:选择合适的函数,尽可能的接近实际情况,尽心参数优化以及公式优化;(4)单位转换优化:尽量控制单位转换的正确性,以准确得出带符号角度;(5)数据输出优化:根据实际需求,输出更详细和准确的数据,以期及时发现并优化平差算法。
1-12单导线条件平差计算--单一闭合导线条件方程

A
三个条件方程:
1.多边形内角和闭合条件(1个)
N
SN-1
βN
SN βN+1 β1
N-1 βN-1
2.纵、横坐标增量闭合条件(2个)
β2
B(1)(N+1) S1 2
S2
β3 β4
3
S3
4
闭合导线示例图
单一闭合导线条件方程
1.多边形内角和闭合条件
由于导线网构成了多边形,其 N 个转折角的平差值应满足多边形内角和条件。
单一闭合导线条件方程
2.纵、横坐标增量闭合条件(2个)
如果x、y 以米为单位,w、vS 以厘米为单位、vβ 以秒为单位。
[cos Ti
vSi
]1N
1
[( yN 1
yi )vi
]1N
wx
0
[sin Ti
vSi ]1N
1
[(
x
N
1
xi )vi ]1N
wy
改正数条件方程式-纯量形式
A
[vi
]N 1 2
w
0
[cos Ti
vSi ]1N
1 2062.65
[(
y
N
1
yi )vi ]1N
wx
0
N
SN-1
βN
SN βN+1 β1
N-1 βN-1
[sin Ti
vSi ]1N
1 2062.65
[(
x
N
1
xi )vi ]1N
wy
0
fx-4850P_单一闭附合图根导线近似平差程序

按键
1 4 -1 237 59 30 2507.693 1215.632 2166.741
说明
显示程序标题 输入 0 为闭合导线 输入导线未知点数 输入 A 点的 x 坐标 输入 A 点的 y 坐标 输入 B 点的 x 坐标 输入 B 点的 y 坐标 显示 A→B 边长 显示 A→B 边方位角 显示 B→A 边方位角 提示输入 B 点角度与平距 输入 B 点水平角 输入 B 点的平距 提示输入 1 点角度与平距 输入 1 点水平角 输入 1 点的平距 提示输入 2 点角度与平距 输入 2 点水平角 输入 2 点的平距 提示输入 3 点角度与平距 输入 3 点水平角 输入 3 点的平距 输入最后一个水平角 显示以角度闭合差(秒) 显示分配角度闭合差后的检核结果 显示 x 坐标增量闭合差 显示 y 坐标增量闭合差 显示导线全长相对闭合差分母 显示第 1 点的坐标计算结果 显示第 1 点的 x 坐标 显示第 1 点的 y 坐标 显示第 2 点的坐标计算结果 显示第 2 点的 x 坐标 显示第 2 点的 y 坐标 显示第 3 点的坐标计算结果 显示第 3 点的 x 坐标 显示第 3 点的 y 坐标 显示检核点的坐标计算结果 显示检核点的 x 坐标 显示检核点的 y 坐标 显示检核点的 x 坐标差 显示检核点的 y 坐标差 程序运行结束显示
Deg:Fix 3
设置十进制度为单位
A"XA(m), 0 TO BEAR A B(Deg)="
输入 A 点 x 坐标或输入≤0 的数值
A>0 B"YA(m)=": R"BEAR A B(Deg)=" A>0 时输入 A 点 y 坐标,否则输入 A→B 方位角
C"XB(m)=":D"YB(m)="
闭合导线平差计算步骤
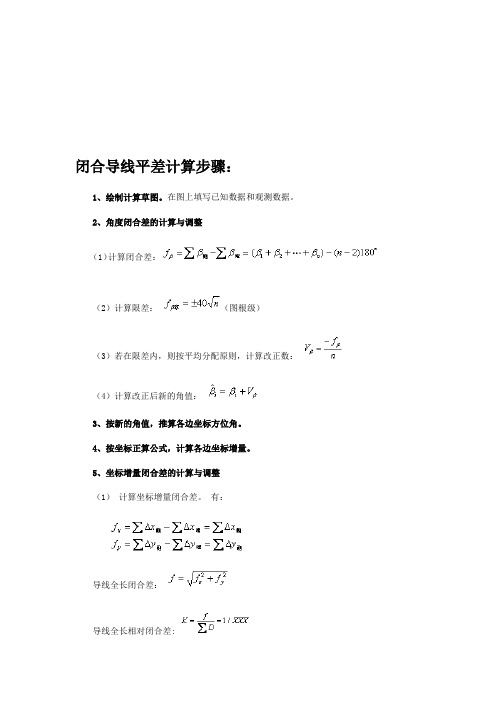
闭合导线平差计算步骤:1、绘制计算草图。
在图上填写已知数据和观测数据。
2、角度闭合差的计算与调整(1)计算闭合差:(2)计算限差:(图根级)(3)若在限差内,则按平均分配原则,计算改正数:(4)计算改正后新的角值:3、按新的角值,推算各边坐标方位角。
4、按坐标正算公式,计算各边坐标增量。
5、坐标增量闭合差的计算与调整(1)计算坐标增量闭合差。
有:导线全长闭合差:导线全长相对闭合差:(2)分配坐标增量闭合差若 K<1/2000 (图根级),则将、以相反符号,按边长成正比分配到各坐标增量上去。
并计算改正后的坐标增量。
6、坐标计算根据起始点的已知坐标和经改正的新的坐标增量,来依次计算各导线点的坐标。
[ 例题 ] 如图所示闭合导线,试计算各导线点的坐标。
计算表格见下图:闭合水准路线内业计算的步骤:(1) 填写观测数据(2) 计算高差闭合差h f =∑h ,若h f ≤容h f时,说明符合精度要求,可以进行高差闭合差的调整;否则,将重新进行观测。
(3) 调整高差闭合差 各段高差改正数:i hi i hi L Lf V n nf V ·· ∑-=∑-=或各段改正高差:ii i V h h +=改(4) 计算待定点的高程闭合差(fh )水准路线中各点间高差的代数和应等于两已知水准点间的高差。
若不等两者之差称为闭合差高差闭合差的计算.支水准路线闭合差的计算方法.附合水准路线闭合差的计算方法.闭合水准路线闭合差的计算方法高差闭合差容许值 (n 为测站数,适合山地)(L 为测段长度,以公里为单位,适合平地)水准测量中,消除闭合差的原则一般按距离或测站数成正比地改正各段的观测高差改正数每公里改正数各测段的改正数每一站改正数各测段的改正数计算的基本步骤高差闭合差的计算闭合差的调整高程的计算(见例题2)例题2高程误差配赋表首先:将检查无误的野外观测成果填入计算表,包括:各测段的距离和高差值h i已知数据第一步:高差闭合差的计算第二步:高差闭合差的调整各测段实测高差加改正数,得改正后的高差h i第三步:待定点高程的计算根据改正后的高差h i,由起始点Ⅲ18开始,逐点推算出各点的高程,列入表中最后算得的Ⅲ19点的高程应与已知的高程HⅢ19相等,否则说明闭合水准路线闭合水准路线的成果计算与附合水准路线基本相同,不同之处是检核条件与附合水准路线不同。
闭合导线平差计算
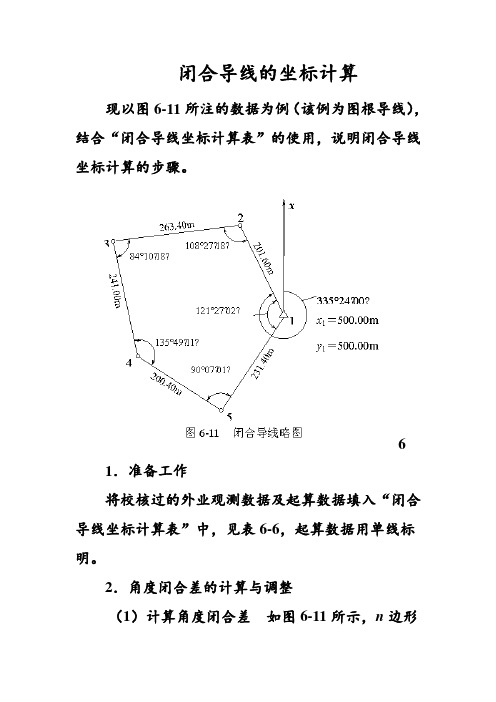
闭合导线的坐标计算现以图6-11所注的数据为例(该例为图根导线),结合“闭合导线坐标计算表”的使用,说明闭合导线坐标计算的步骤。
6 1.准备工作将校核过的外业观测数据及起算数据填入“闭合导线坐标计算表”中,见表6-6,起算数据用单线标明。
2.角度闭合差的计算与调整(1)计算角度闭合差如图6-11所示,n边形闭合导线内角和的理论值为:(6-5)式中n——导线边数或转折角数。
由于观测水平角不可避免地含有误差,致使实测的内角之和不等于理论值,两者之差,称为角度闭合差,用fβ表示,即(6-6)(2)计算角度闭合差的容许值角度闭合差的大小反映了水平角观测的质量。
图根导线角度闭合差的容许值fβp的计算公式为:(6-7)如果>,说明所测水平角不符合要求,应对水平角重新检查或重测。
如果≤,说明所测水平角符合要求,可对所测水平角进行调整。
(3)计算水平角改正数如角度闭合差不超过角度闭合差的容许值,则将角度闭合差反符号平均分配到各观测水平角中,也就是每个水平角加相同的改正数vβ,vβ的计算公式为:(6-8)计算检核:水平角改正数之和应与角度闭合差大小相等符号相反,即(4)计算改正后的水平角改正后的水平角βi改等于所测水平角加上水平角改正数(6-9)计算检核:改正后的闭合导线内角之和应为(n -2)×180˚,本例为540˚。
本例中fβ、fβp的计算见表6-5辅助计算栏,水平角的改正数和改正后的水平角见表6-6第3、4栏。
3.推算各边的坐标方位角根据起始边的已知坐标方位角及改正后的水平角,按式(4-18)和式(4-19)推算其它各导线边的坐标方位角。
本例观测左角,按式(4-18)推算出导线各边的坐标方位角,填入表6-6的第五栏内。
计算检核:最后推算出起始边坐标方位角,它应与原有的起始边已知坐标方位角相等,否则应重新检查计算。
4.坐标增量的计算及其闭合差的调整(1)计算坐标增量根据已推算出的导线各边的坐标方位角和相应边的边长,按式(6-1)计算各边的坐标增量。
闭合导线内业计算步骤及公式
闭合导线内业计算步骤及公式闭合导线内业计算是解决地理测量中精确测量闭合导线的误差补偿问题的方法之一。
在实际测量中,由于各种不可避免的因素,如环境条件、仪器误差等,闭合导线的测量结果往往会存在一定的误差。
为了提高测量的精度和可靠性,需要进行误差补偿,即对测量结果进行修正。
闭合导线内业计算的步骤如下:1. 首先,进行闭合导线的观测。
这包括测量闭合导线的各个边长、方位角、高程、垂直角等。
一般来说,测量人员需要根据具体情况选择合适的观测方法和仪器设备。
2. 接下来,进行观测数据的处理。
这包括对所观测到的数据进行检查、校正和调整。
在这一步骤中,需要根据测量误差的特点和数学原理,采用适当的方法进行数据处理。
3. 然后,进行导线方位角的闭合差调整。
由于各个边长的测量结果可能存在误差,导致闭合导线的方位角不完全闭合。
因此,需要进行方位角的调整,使其闭合差最小。
4. 对闭合导线的垂直角进行闭合差调整。
与方位角类似,闭合导线的垂直角也可能存在误差。
通过对垂直角的调整,可以使其闭合差最小。
5. 最后,对闭合导线的整体进行平差。
这包括对闭合导线的边长、方位角、垂直角等进行综合平差,使其达到最佳的闭合精度。
闭合导线内业计算的公式如下:闭合导线的总长度L = ΣLi闭合导线的纵坐标闭合差ΔH = Σ(Hi - Hi')闭合导线的横坐标闭合差ΔE = Σ(Ei - Ei')其中,Li为闭合导线的各边长度,Hi和Hi'分别为闭合导线的起点和终点的垂直角,Ei和Ei'分别为闭合导线的起点和终点的方位角。
闭合导线内业计算是精确测量闭合导线的重要方法。
通过对测量数据的处理和修正,可以提高导线测量的精度和可靠性。
然而,在进行闭合导线内业计算时,需要综合考虑各种因素的影响,并选择合适的方法和工具进行处理。
只有在充分理解闭合导线内业计算的步骤和公式的基础上,才能有效地进行闭合导线的误差补偿,从而获得准确的测量结果。
导线网条件平差计算
§3-3 导线网条件平差计算2学时导线网,包括单一附合导线、单一闭合导线和结点导线网,是目前较为常用的控制测量布设方式之一,其观测值有长度观测值和角度观测值。
在本节中我们主要讨论单一导线的平差计算,先讨论单一附合导线问题。
一.单一附合导线条件平差如图3-6所示,在这个导线中有四个已知点、n -1个未知点、n +1个水平角观测值和n 条边长观测值,总观测值数为2n +1。
从图中可以分析,要确定一个未知点的坐标,必须测一条导线边和一个水平角,即需要两个观测值;要确定全部n -1个未知点,则需观测n -1个导线边和n -1个水平角,即必要观测值数t = 2n -2;则多余观测个数r = (2n +1) – t = 3。
也就是说,在单一附合导线中,只有三个条件方程。
下面讨论其条件方程式及改正数条件方程式的写法。
设AB 边方位角已知值为T AB = T 0,CD 边方位角已知值为T CD 、计算值为T n+1,B 点坐标的已知值为(B x ,B y )或者(x 1, y 1),C 点坐标的已知值为(C x ,C y )、计算值为(x n +1, y n +1)。
三个条件中,有一个方位角附合条件、两个坐标附合条件。
方位角附合条件:从起始方位角推算至终边的方位角平差值应等于其已知值,即0ˆ1=-+CD n T T(3-3-1)纵横坐标附合条件:从起始点推算至终点所得到的坐标平差值应与终点的已知坐标值相等,即0ˆ1=-+C n x x(3-3-2) 0ˆ1=-+C n y y(3-3-3)1.方位角附合条件式180)1(][180)1(]ˆ[ˆ1101101⋅+±++=⋅+±+=+++n v T n T T n i n i n i βββ则(3-3-1)式可写为0180)1(][ˆ1101=-⋅+±++=-++CD n i CD n T n v T T T i ββ整理得][11=-+T n w v i β (3-3-4)其中)180)1(][(110CD n i T T n T w -⋅+±+-=+ β2.纵坐标附合条件式 终点C 坐标平差值表示为n i B n x x x 11]ˆ[ˆ∆+=+(3-3-5)而第i 边的坐标增量为i i i T S x ˆcos ˆˆ=∆(3-3-6)式中iS i i v S S +=ˆii ij i i j i j i T v i T v i v T i T T j j j +=⋅±++=⋅±++=⋅±+=10111010][180][][180][180]ˆ[ˆββββββ其中T i 是第i 边的近似坐标方位角180][01⋅±+=i T T i j i β(3-3-7)则(3-3-6)式可表示为)]cos([)(ˆ1i i S i i T v v S x j i ++=∆β上式按泰勒级数展开,取至一次项,得ii S i i i j i v y v T x x1][cos ˆβρ''∆-⋅+∆=∆(3-3-8)其中i i i T S x cos =∆,为由观测值计算出的近似坐标增量。
导线平差 (2)
导线平差1. 导线平差概述导线平差是测量工程中的一项重要工作,用于对已测得的导线长度和方位角进行误差修正,以提高测量结果的精度和准确性。
导线平差主要包括闭合导线平差和杆线平差两种方法。
闭合导线平差是指在一个闭合导线网中,根据导线观测数据进行误差修正的过程,以确保闭合导线的起点和终点高程相等。
杆线平差是指对于一个单独的导线杆上的水平角进行误差修正的过程,以确保杆线测量结果的精度。
本文将对闭合导线平差和杆线平差的原理和方法进行介绍,并通过示例进行详细解析。
2. 闭合导线平差闭合导线平差是导线测量中常用的一种平差方法,主要用于解决闭合导线的高程差和角度残差问题。
闭合导线平差的基本原理是通过对闭合导线的测量数据进行计算和修正,使闭合导线的起点和终点高程相等,同时保证角度观测值的准确性。
闭合导线平差的步骤包括: - 观测数据处理,包括导线长度观测值和角度观测值的计算。
- 初始近似计算,根据观测数据计算初始的导线长度和方位角。
- 误差修正,根据观测数据和初始计算结果,进行误差修正计算,得到最终的导线长度和方位角。
- 残差分析,对平差结果进行残差分析,评估平差结果的精度。
闭合导线平差的核心思想是通过误差修正计算,不断逼近真实的导线长度和方位角,从而提高闭合导线测量结果的精度和准确性。
3. 杆线平差与闭合导线平差不同,杆线平差是针对单独的导线杆上的水平角进行误差修正的方法。
在导线测量中,常常需要在导线杆上测量角度值,以确定导线的方向和倾斜情况。
杆线平差的基本原理是通过对导线杆的角度观测值进行计算和修正,从而得到准确的导线方向和倾斜角度。
杆线平差的步骤包括: - 观测数据处理,包括导线杆上角度观测值的计算。
- 初始近似计算,根据观测数据计算初始的导线方向和倾斜角度。
- 误差修正,根据观测数据和初始计算结果,进行误差修正计算,得到最终的导线方向和倾斜角度。
- 残差分析,对平差结果进行残差分析,评估平差结果的精度。
导线平差 (2)
导线平差什么是导线平差导线平差是一种测量方法,用于测量和校正地面上的导线的位置和形状误差。
这些误差通常由各种因素引起,如地形变化、温度变化和测量仪器误差等。
导线平差可以帮助我们获得更准确的测量结果,并对地面上的导线进行校正。
导线平差的目的导线平差的主要目的是消除导线测量中的误差,使测量结果更加准确可靠。
通过导线平差,我们可以校正导线的曲线形状、长度和位置误差,以提高测量的准确性和可靠性。
导线平差的步骤导线平差通常包括以下几个步骤:1. 测量导线在进行导线平差之前,首先需要对导线进行测量。
测量导线可以使用各种测量仪器,如全站仪、经纬仪等。
在测量导线时,需要记录导线的起点和终点坐标,以及导线上的其他测量点坐标。
2. 创建导线平差网络在测量导线后,我们需要创建一个导线平差网络。
导线平差网络是由测量导线和测量点组成的网络。
通过导线平差网络,我们可以计算出导线的长度和位置误差。
3. 进行导线平差计算在创建导线平差网络之后,我们可以进行导线平差计算。
导线平差计算通常涉及各种数学和统计方法,如最小二乘法、误差传播法等。
通过导线平差计算,我们可以得到导线的校正结果。
4. 校正导线根据导线平差计算的结果,我们可以对导线进行校正。
校正导线包括校正导线的长度、形状和位置。
校正导线可以使用各种方法,如切割导线、唐氏法等。
导线平差的应用导线平差在土木工程、测绘工程、地质工程等领域广泛应用。
它可以帮助我们获得更准确的测量结果,并对导线进行校正。
导线平差还可以用于创建地形地图、计算土地面积和边界等。
导线平差的注意事项在进行导线平差时,需要注意以下几个事项:1.始终使用准确的测量仪器和工具。
测量仪器和工具的准确性会直接影响导线平差的结果。
2.在测量导线之前,需要确保导线表面干净和平整。
导线表面的污垢和不平整会影响测量结果。
3.注意温度变化对导线长度的影响。
温度变化会导致导线的伸缩,进而影响导线平差的结果。
4.在进行导线平差计算时,需要注意数学和统计方法的正确使用。
闭合导线平差计算步骤资料讲解
闭合导线平差计算步骤:1、绘制计算草图。
在图上填写已知数据和观测数据。
2、角度闭合差的计算与调整(1)计算闭合差:(2)计算限差:(图根级)(3)若在限差内,则按平均分配原则,计算改正数:(4)计算改正后新的角值:3、按新的角值,推算各边坐标方位角。
4、按坐标正算公式,计算各边坐标增量。
5、坐标增量闭合差的计算与调整(1)计算坐标增量闭合差。
有:导线全长闭合差:导线全长相对闭合差:(2)分配坐标增量闭合差若 K<1/2000 (图根级),则将、以相反符号,按边长成正比分配到各坐标增量上去。
并计算改正后的坐标增量。
6、坐标计算根据起始点的已知坐标和经改正的新的坐标增量,来依次计算各导线点的坐标。
[ 例题 ] 如图所示闭合导线,试计算各导线点的坐标。
计算表格见下图:闭合水准路线内业计算的步骤:(1) 填写观测数据(2) 计算高差闭合差h f =∑h ,若h f ≤容h f时,说明符合精度要求,可以进行高差闭合差的调整;否则,将重新进行观测。
(3) 调整高差闭合差 各段高差改正数:i hi i hi L L f V n nf V ·· ∑-=∑-=或各段改正高差:ii i V h h +=改(4) 计算待定点的高程闭合差(fh )水准路线中各点间高差的代数和应等于两已知水准点间的高差。
若不等两者之差称为闭合差高差闭合差的计算.支水准路线闭合差的计算方法.附合水准路线闭合差的计算方法.闭合水准路线闭合差的计算方法高差闭合差容许值 (n 为测站数,适合山地)(L 为测段长度,以公里为单位,适合平地)水准测量中,消除闭合差的原则一般按距离或测站数成正比地改正各段的观测高差改正数每公里改正数各测段的改正数每一站改正数各测段的改正数计算的基本步骤高差闭合差的计算闭合差的调整高程的计算(见例题2)例题2高程误差配赋表首先:将检查无误的野外观测成果填入计算表,包括:各测段的距离和高差值h i已知数据第一步:高差闭合差的计算第二步:高差闭合差的调整各测段实测高差加改正数,得改正后的高差h i第三步:待定点高程的计算根据改正后的高差h i,由起始点Ⅲ18开始,逐点推算出各点的高程,列入表中最后算得的Ⅲ19点的高程应与已知的高程HⅢ19相等,否则说明闭合水准路线闭合水准路线的成果计算与附合水准路线基本相同,不同之处是检核条件与附合水准路线不同。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
写出单一闭合导线近似平差的步骤与公式,指出附合导线和闭合导线计算中的不同点。
1. 检查并整理外业观测成果;
2. 计算角度闭合差并调整,∑⨯--=180)2(n f ββ
,当满足限差要求后可调整,n f v i /β
β-=,检核:ββf v i -=∑; 3.
4. 坐标方位角推算:180±+=左后前βαα或180±-=右后前βαα,检核已知
边方位角;
5. 坐标增量计算:ij ij ij
s x αcos ⨯=∆,ij ij ij s y αsin ⨯=∆; 6.
7. 坐标增量闭合差的计算与调整:
∑∆=x f x ,∑∆=y f y ,∑+=s f f k y x /22,当满足要求时可调整,∑⨯-=∆s s f v ij x xij /,∑⨯-=∆s s f v ij y yij /,检核:x xij f v -=∑∆,y yij f v -=∑∆;
8.
9.
10.
11. 待定点坐标计算:1,1,1+∆+++∆+=i i x i i i i v x x x ,1
,1,1+∆+++∆+=i i y i i i i v y y y ,检核:计算回已知点。
附和导线与闭合导线计算中的不同点在于:
1.
2.
3.
4.角度闭合差的计算;坐标增量闭合差的计算。