阻容感传感器-哈工大
哈工大测试大作业——传感器综合运用——题目四全解

传感器综合运用一、设计题目如图所示工件,在生产线的30°滑道上自上而下滑落,要求在滑动过程中检测工件厚度,并且计数。
图中4mm尺寸公差带为10μm。
图1.测量工件二、厚度检测传感器的选择电容传感器是把被测的机械量,如位移、压力等转换为电容量变化的传感器。
它的敏感部分就是具有可变参数的电容器。
其最常用的形式是由两个平行电极组成、极间以空气为介质的电容器(见图)。
若忽略边缘效应,平板电容器的电容为εA/δ,式中ε为极间介质的介电常数,A为两电极互相覆盖的有效面积,δ为两电极之间的距离。
δ、A、ε三个参数中任一个的变化都将引起电容量变化,并可用于测量。
因此电容式传感器可分为极距变化型、面积变化型、介质变化型三类。
极距变化型一般用来测量微小的线位移或由于力、压力、振动等引起的极距变化。
面积变化型一般用于测量角位移或较大的线位移。
介质变化型常用于物位测量和各种介质的温度、密度、湿度的测定。
与电阻式或电感式传感器相比,电容传感器具有四大优点:(l)分辨力高,常用于精密测量;(2)动态响应速度快,可以直接用于某些生产线上的动态测量;(3)从信号源取得的能量少,有利于发挥其测量精度;(4)机械结构简单,易于实现非接触式测量。
因此电容传感器在精密测量中占有重要的地位。
此外,电容器传感器还具有结构简单,价格便宜,灵敏度高,零磁滞,真空兼容,过载能力强,动态响应特性好和对高温、辐射、强振等恶劣条件的适应性强等优点。
因此,在本题中选择电容传感器作为厚度检测传感器。
三、电容传感器的检测原理电容式传感器可分为面积变化型、极距变化型、介质变化型三类,下面将分述其检测原理。
1、面积变化型电容传感器这一类传感器输出特性是线性的,灵敏度是常数。
这一类传感器多用于检测直线位移、角位移、尺寸等参量。
测量装置如图2所示。
图2.变面积式电容传感器其电容量计算公式为:002121212()22ln()ln()ln()x l l l l l C C C C r r r r r r lπεπεπε-∆∆∆∆=-=-=-=- 式中 L -外圆筒与内圆柱覆盖部分的长度21,r r -外圆筒内半径与内圆柱外半径 灵敏度0212ln()C C l r r l πε∆=-=-∆2、极距变化型电容传感器极距变化型电容传感器一般用来测量微小的线位移或由于力、压力、振动等引起的极距变化。
基于MEMS技术微电容压力传感器转换电路的设计

XFG1 6
V1 12V
C2 1.5pF R1 1.8M赘 + TL082 U1 4 R2 20M赘
XSC1
3
V2 12V
0
C1 1 1pF 5 C4 100pF
C3 100pF
图5 Fig.5
电容-电压转换电路仿真窗口视图
图6 Fig.6
电容-电压转换电路仿真虚拟示波器输出图
C-V transformation simulation window
: ( 1)
( 2)
式 ( 2 ) 表明 , 输出电压值正比于被测电容值 。 为了使直接反映被测电容的变化量 , 目前常用的是带负反馈 回路的 C / V 转换电路 。 这种电路的特点是抗杂散性好 、 分辨率高 。 由于采用交流放大器 , 所以低漂移 、 高 信噪比 。
收稿日期: 2009 - 12 - 08 基金项目: 黑龙江省自然科学基金资助项目( A200805 ) 作者简介: 何立志( 1966 - ) , 男, 高级工程师, 硕士, 主要研究方向: 传感器技术
[ 7] A od 愈大, 很显然, 相对误差量与杂散电容 C S2 有关, 这时不能消除杂散电容的影响 , 从式 ( 7 ) 中可以看出, | jω( C x + C S2 ) ·Z f | 愈小, 相对误差量愈小。 同时考虑运放的电压放大倍数、 输入阻抗为有限值, 即 A od ≠ ∞
且 r id ≠ ∞ 时, 运算放大器有输入电流, 此时的输出为 A od ·jωC x Z f VO ' = - ·V i A od + 1 + jω( C x + C s1 ) Z f + Z f / r id 则相对误差为 δv = - Zf 1 + jω( C x + C S2 ) Z f + Z f / r id 1 [ 1 + jω( C x + C S2 ) Z f ]- ≈ A od + 1 + jω( C x + C s1 ) Z f + Z f / r id A od A od ·r id
自动控制元件及线路-测量元件概述-哈工大

静特性
变换函数是描述静特性的数学方程(理论的、理想的) 结构和形式是在分析的基础上建立的 参数通过实际标定确定,统计分析、曲线拟合等 大多数测量元件:y=kx
灵敏度
灵敏度:输出量的微小增 量与输入量微小增量的比 值,变换函数的一阶导数 或静特性曲线的斜率。 非线性的,不同的点有不 同的灵敏度。 线性的静特性,灵敏度不 变。
悬停
巡航飞行
高速飞行
无人机控制系统结构
整体结构设计
机载控制系统
主控制单元
姿态控制 高度传感器 风速传感器
无人机控制系统结构
转速传感器 温度传感器 IMU模块 GPS模块 摄像头
涵 道 式 旋 翼 无 人 飞 行 器
飞行控制 抗干扰控制 起降控制
传 感 器 单 元
执 行 器 单 元
发动机油门 伺服舵机1 伺服舵机2 伺服舵机3 伺服舵机4
u
TL
km R Ls
y 1 1 s Js D
y
测量元件组成
把物理量转化 成电路参量
感受或响应被 测量并转化成 另一种物理量
转换特定形式的 电量(调节、转 换、放大、运算、 调制)
测量元件: 检测出一种量并转换成容易处理的另一种量。 功能:检测和转换。 处理:放大、加减、积分、微分、滤波、存储和传送。 容易处理的量:主要指的是电信号。
定义、作用、组成和分类
2
3
元件特性 讨论
4
测量元件在控制系统中的作用
校正元件 输入 控制器 功率元件 功放 执行元件 执行器 被控 对象 输出
测量元件
执行元件:功能是驱动被控对象,控制或改变被控量
放大元件:提供能量,将微弱控制信号放大驱动执行元件。 校正元件:作用是改善系统的性能,使系统能正常可靠地工作并达到 规定的性能指标 测量元件:将一种量按照某种规律转换成容易处理的另一种量的元件。 (将外界输入信号变换为电信号的元件。)
哈工大 机械工程测试大作业二--传感器综合运用
(1)
图 2 内锥计算方法
所以测量如图 1 所示工件的内孔锥度的思路为测量在一段轴线距离上两端点的孔径值,故需要位移测 量传感器,பைடு நூலகம்方案选用压力式气动测量方法(图 3) 。而本方案要求为计算机控制的测试系统,所以还需要 将气压信号转化为电信号,故还需要一个压力传感器。
1
图 3 气动测量圆锥孔示意图
3
表 2 气压传感器型号及规格
传感器 气压传感器
型号 郎恩 PT100
压力范围 0~0.2MPa
精度 ±0.5%F.S
输出信号 0~5V
响应时间 10ms
图 7 郎恩气压传感器 PT100
3.
测量方案
根据要求,本方案为计算机控制的测试系统,即数字化气动测量系统,它包括气动测量、气电转换、 数据采集和计算机处理等部分。 1) 气动测量 差压式气动测量气路原理图如图 4 所示。测量回路又由两个背压回路组成,测量时两个背压回路处于 相同的环境压力和温度下,使外界环境(压力、温度和湿度等)对测量的影响降到最小,测量精度高、稳 定性好。 2) 气电转换 气电转换原理图如图 8 所示。本子系统包含压电传感器、信号放大器以及模数转换器。
气电转换 信号放大
图 8 气电转换原理图
模数转换
3) 数据采集 数字信号的采集采用 PCI-8335B 数采卡。PCI-8335B 卡适用于提供了 PCI 总线插槽的 PC 系列微机, 具有即插即用(PnP)的功能。其操作系统可选用目前流行的 Windows 系列、高稳定性的 Unix 等多种操作 系统以及专业数据采集分析系统 LabVIEW 等软件环境。在硬件的安装上也非常简单,使用时只需将接口 卡插入机内任何一个 PCI 总线插槽中并用螺丝固定,信号电缆从机箱外部直接接入。 PCI-8335B 卡安装使用简便、功能齐全。其 A/D 转换启动方式有程控频率触发、程控单步触发。A/D 转换后的数据结果通过先进先出存储器(FIFO)缓存后由 PCI 总线读出。 4) 计算机处理 基于本方案要求,选择中断方式来完成对数据采集卡编程。中泰 PCI-8335B 数采卡设备驱动程序支持 Visual C++, 可以通过编程实现对本方案测量仪器的控制与监测。
电容式微位移传感器设计及其应用研究_孙立宁
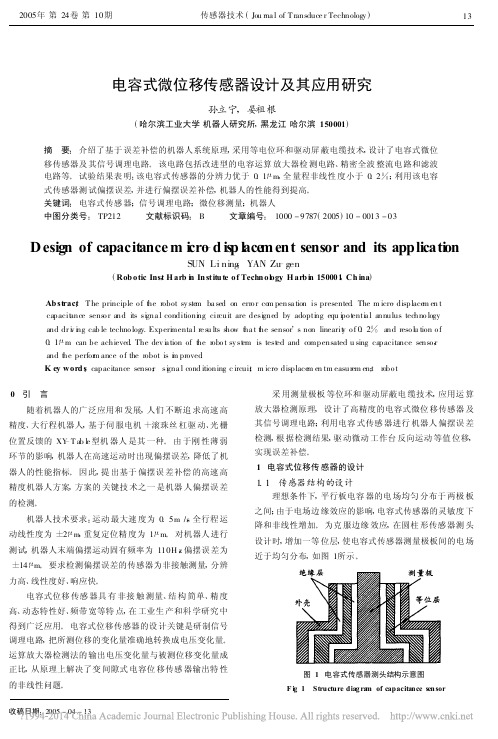
2005年第24卷第10期 传感器技术(Jou rna l of T ransduce r Technology)电容式微位移传感器设计及其应用研究孙立宁,晏祖根(哈尔滨工业大学机器人研究所,黑龙江哈尔滨150001)摘 要:介绍了基于误差补偿的机器人系统原理,采用等电位环和驱动屏蔽电缆技术,设计了电容式微位移传感器及其信号调理电路。
该电路包括改进型的电容运算放大器检测电路、精密全波整流电路和滤波电路等。
试验结果表明:该电容式传感器的分辨力优于0.1μm,全量程非线性度小于0.2%;利用该电容式传感器测试偏摆误差,并进行偏摆误差补偿,机器人的性能得到提高。
关键词:电容式传感器;信号调理电路;微位移测量;机器人中图分类号:TP212 文献标识码:B 文章编号:1000-9787(2005)10-0013-03Design of capacit ance m i cro-d is p l ace m ent sensor and its applicati onSUN Li-ning,YAN Zu-gen(Rob otic Inst,H arb i n In st itu te of Techn ol ogy,H arb i n150001,Ch ina)Ab stract:T he principle o f t he robot sy ste m ba sed on erro r co m pensa tion is presented.The m icro-displace m en tcapacit ance sens o r and its si gna l conditioni ng circuit are desi gned by adopti ng equ i po t enti a l annulus techno logyand dr i v i ng cab le techno logy.Experi menta l re s u lts s how t ha t t he sensor’s non linearit y o f0.2%and reso l u tion o f0.1μm can be achieved.The dev i a tion of t he robo t sy st em is test ed and compensated u sing capacitance senso r,and t he perfor m ance o f the robot is i m proved.K ey word s:capacitance senso r;si gna l cond itioning c ircuit;m icro-displace m en tm easurem en t;robo t0 引 言随着机器人的广泛应用和发展,人们不断追求高速高精度、大行程机器人,基于伺服电机+滚珠丝杠驱动、光栅位置反馈的XY-T ab l e型机器人是其一种。
哈工大-测试与传感技术-文档资料

n (1 n)2
R1
第二章 电阻式传感器 哈尔滨工业大学
Ku
U0 R1
U
n (1 n)2
—— 电桥电压灵敏度
分析可知:
R1
① 电桥电压灵敏度Ku正比于电桥供电电压U
U↑→ Ku↑
但供电电压U的提高受到应变片允许功耗的限制, 所以要作适当选择;
② 电桥电压灵敏度Ku=Ku(n) , 恰当地选择桥臂比n 的值,保证电桥具有较高的电压灵敏度。
5. 光电电位器 是一种非接触式电位器,一光束代替常规的电刷。一般采用氧化铝作
基体,在其上蒸发一条带状电阻薄膜(镍铝合金或镍铁合金)和一条导电 极(鉻合金或银)。
图1是这种电位器的结构图。平时无光照时,电阻体 和导电电极之间由于光电导层电阻很大而呈现绝缘状 态。当光束照射在电阻体和导电电极的间隙上时,由 于光电导层被照射部位的亮电阻很小,使电阻体被照 射部位和导电电极导通,于是光电电位器的输出端就 有电压输出,输出电压的大小与光束位移照射到的位 置有关,从而实现了将光束位移转换为电压信号输 出。 特点:光电电位器最大的优点是非接触型,不存在磨损问题,它不会 对传感器系统带来任何有害的摩擦力矩,从而提高了传感器的精度、寿 命、可靠性及分辨率。光电电位器的缺点是接触电阻大,线性度差。由于 它的输出阻抗较高,需要配接高输入阻抗的放大器。尽管光电电位器有着 不少的缺点,但由于它的优点是其它电位器所无法比拟的,因此在许多重 要场合仍得到应用。
y
P
P
x
y x
l0
纵变向应y 造变成电x 阻造减成少电。阻增加,横向应
图4 放大的栅状电阻应变片及弯角 部分示意图
a r 2b
第二章 电阻式传感器 哈尔滨工业大学
最新课件-哈工大唐文彦版传感器第2020章电容式传感器 推荐
时 , 由 式 (4-1) 可 知 其
初始电容量C0为
极距式电容传感器
c0
0 r A 0
(4-2)
4.2.1 极距式电容传感器
若电容器极板间距离由初始值δ0缩小Δδ,
电容量增大C, 则有
C1 C0 C 0 r A c0 0 1 0
C C0
(4-3)
4.2.1 极距式电容传感器
4.2.1 极距式电容传感器
一般变极板间距离电容式传感器
• 起始电容在 20~100pF之间, • 极板间距离在25~200μm的范围内, • 最大位移应小于间距的1/10,
故在微位移测量中应用最广
4.2.2 变面积型电容式传感器
• 改变极板间覆盖面积的电容式传感器,
常用的有角位移型和线位移型两种。
(4-5)
2
• 其灵敏度为:
d dC 0r 2 常数(4-6) da 2
4.2.2 变面积型电容式传感 器
• 线位移型电容
式传感器
• 平面线位移型
和圆柱线位移 型两种。
4.2.2 变面积型电容式传感器
• 对于平面线位移型电容式传感器,当宽 度为b的动板沿箭头x方向移动时,覆盖
面积变化,电容量也随之变化
式中
x——外圆筒与内圆筒覆盖部分长度;
r1、r2——外圆筒内半径与内圆筒
(或内圆柱)外半径,即它们的工 作半径
其灵敏度为:
d dC
2 0
(4-9)
常数
dx ln( r2 / r1)
4.2.3 变介电常数型电容传感 器
• 变介电常数型电容传感器的结构原
理如图所示
4.2.3 变介电常数型电容传感 器
4.2.1 极距式电容传感器
哈工大模电大作业2

一、实验内容F μ的电容器,阻值尽量接近实际计算值。
电路设计完后,画出频率响应曲线,并采用Multisim 进展仿真分析。
二、原理分析给定电容值0.01uF ,计算得:43R R = = 10ΩK ,选取1R = 2R = 39ΩK 按照滤波器的工作频带,滤波器可分为低通滤波器〔LPF 〕、高通滤波器〔HPF 〕、带通滤波器〔BPF 〕、带阻滤波器〔BEF 〕几种。
按滤波器传递函数的极点数又分为一阶滤波器、二阶滤波器等。
如果滤波器仅由无源元件〔电阻、电容和电感〕组成,那么称之为无源滤波器;假设滤波器含有有源元件〔晶体管、集成运放等〕,那么称之为有源滤波器。
由阻容元件和运算放大器组成的滤波电路称为RC 有源滤波器。
由于集成运放有带宽的限制,目前RC 有源滤波器的工作频率比拟低,一般不超过1MHz 。
1、 有源低通滤波器〔LPF 〕低通滤波器允许输入信号中低于截止频率的低频或直流分量通过,抑制高频分量。
有源低通滤波器是以RC 无源低通滤波器为根底,与集成运放连接而成。
2、 二阶压控型低通滤波器二阶压控型有源低通滤波器如下列图所示。
图 1. 二阶压控型低通滤波器原理图因为电容器C1的接地端改为接运放输出端,引入了正反应,由于在通带内电容器视为“开路〞,因此C1的改接不影响滤波器的通带电压放大倍数,即11up RfA R =+。
为简化计算,令23,12R R R C C C ====,根据“虚短〞和“虚断〞特征及叠加定理可解得传递函数:2()()1(3)(sCR)up o us I up A u s A u s A sCR ==+-+ 令s j ω=,得滤波器的频率响应表达式:21()(3)upu up o oA A f f j A f f =-+-式中12o f RCπ=,令21()(3)H H up o o f f j A f f -+-=解得该滤波器的上限截止频率为 1.272H o o f f f =≈ 定义有源低通滤波器的品质因数Q 为o f f =时电压放大倍数的模与通带电压放大倍数之比,即13upQ A =- 实际应用,Q 的调节范围0100Q ≤≤,一般选取1Q =附近的值。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
电感式传感器的工作基础: 电磁感应 即利用线圈自感或互感的变化来实现非电量的测量
19
12.2 电感式传感器
自感式传感器( 电感式传感器) 电感式传感器 差动变压器 互感式传感器 电涡流式传感器
变压器式传感器具有单独的激磁线圈和单独的磁场检测线圈,自感 式传感器只有一组线圈,既供激磁用,又供检测磁场和电感用。 电感式传感器的主体结构包括以下几个部分: 产生交变磁场的激磁线圈。 可变磁路装置,改变磁阻或磁场。 检测感应电势或磁场的线圈。
& U
圆柱( 筒) 式力传感器 ( a) 柱式 ( b) 筒式 ( c) 圆柱面展开图 ( d) 桥路连线图
16
12.1.2 应变式电阻传感器
柱( 筒) 式力传感器
特点: 结构简单、 可承受很大载荷; 多种截面形状: 实心截面、 空心截面。
17
12.2 电感式传感器
把机械位移转换为感应电势,可以用来测量位移和 振动、 压力、 流量、 重量、 力矩、 应变等。
4
12.1.1 电位器
电位器的结构 1. 线绕电位器 线绕电位器电阻值的变化不连续,一匝一匝突跳,所以有 阶梯误差。
5
12.1.1 电位器
2. 非线绕电位器
v 这种电位器所用的电阻元件包括碳质电阻,金属 陶瓷电阻,金属膜电阻和导电塑料电阻。 v 导电塑料的优点是旋转寿命长。表面特别光滑, 所以分辨率非常高。 v 高性能的伺服系统中经常使用导电塑料电位器。
1
变磁阻式传感器由 线圈、 铁芯和衔铁 三部分组成。铁芯
2 1
铁芯
W
和衔铁由导磁材料 制成。
2
±∆δ
衔铁
22
12.2 电感式传感器
线圈
1
1
铁芯
W
2
2
±∆δ
衔铁
当衔铁移动时,气隙厚度δ 发生改变,引起磁路中磁阻变 化,从而导致电感线圈的电感值变化,因此只要能测出这 种电感量的变化,就能确定衔铁位移量的大小和方向。
上式表明: 当线圈匝数为常数时,电感L仅仅是磁路中磁阻 Rm的函数,改变δ 或A0均可导致电感变化,因此变磁阻式传 感器又可分为变气隙厚度δ 的传感器和变气隙面积A0的传感 器。 目前使用最广泛的是变气隙厚度式电 感传感器。
26
12.2 电感式传感器
输出特性 L与δ之间是非线性关系, 特性曲线如图所示。
W W µ0 A0 = L= Rm 2δ
2 2
变隙式电压传感器的L-δ特性
27
12.2 电感式传感器
灵敏度为
∆L L0 1 = K0 = ∆δ δ 0
可见: 变间隙式电感传感器的测量范围与灵敏度 及线性度相矛盾,因此变隙式电感式传感器适用 于测量微小位移的场合。
28
12.2 电感式传感器
v 衔铁上移 § 切线斜率变大 v 衔铁下移 § 切线斜率变小
dA dr =2 A r
材料力学: 在弹性范围内,金属丝受拉力时,沿轴向伸 长,沿径向缩短,轴向应变和径向应变的关系可表示为
dr dl = −µ r l
μ 为电阻丝材料的泊松比, 负号表示应变方向相反
10
12.1.2 应变式电阻传感器
推得:
dρ dR ρ dl = (1 + 2µ + ) dl l R l
通常气隙磁阻远大于铁芯和衔铁的磁阻, 即
2δ l1 >> µ1 A1 µ 0 A0
2δ l2 >> µ 2 A2 µ0 A0
2δ 则磁路总磁阻可重写为 Rm = µ0 A0
IW ϕ= Rm
ψ Wϕ L= = I I
W 2 W 2 µ0 A0 = L= Rm 2δ
25
12.2 电感式传感器
W 2 W 2 µ0 A0 = L= Rm 2δ
大量实验证明,在电阻丝拉伸极限内,电阻的相对变化与应 变成正比,即K为常数。
12
12.1.2 应变式电阻传感器
二、 应变片的结构
1. 金属电阻应变片 丝式应变片,箔式应变片及薄膜式。
2. 半导体应变片 以半导体基片本身作感受元件,并在其上 扩散成电阻,做成压阻式传感器。
13
12.1.2 应变式电阻传感器
2
12.2 电感式传感器
v 衔铁上移:
∆δ ∆δ ∆L = + +L L0 非线性部分 δ 0 δ 0
v 衔铁下移:
∆L ∆δ = - L0 非线性部分 δ0 ∆δ + -L δ0
3
① 差动式变间隙电感传感器的灵敏度是单线圈式的两倍。 ②
∆δ 差动式的非线性项(忽略高次项): ∆L / L0 = 2 δ0 2 ∆δ 单线圈的非线性项(忽略高次项):∆L / L0 = δ 0
由于Δ δ /δ 0<<1,因此,差动式的线性度得到明显改善。
l― 外圆筒与内圆柱遮盖部分的长度; R 、 r ― 外圆筒内半径和内圆柱( 或圆筒) 外半径
单边圆柱型线位移式元件,当可动极2 位移x 时
43
12.3 电容式传感器
(4) 电容栅型敏感元件
44
12.3 电容式传感器
2.改变极间距离的电容式敏感元件
εS C= d
电容变化和距离是非线性的
45
12.3 电容式传感器
32
12.2.2 电感式传感器的应用
电感式滚柱分选装置
33
12.3 电容式传感器 一、 工作原理 将机械转角或线位移转 换为电容器的电容量, 再通过测量电路把电容 量变换成电信号输出。
由电容式敏感元件和转换电路两部分组成。
34
12.3 电容式传感器
♦电容器:
平板电容器
2πε L C= D ln d
理想输出值 U 0 = Ei β = Kθ i
7
12.1.1 电位器 测量正、 负方向位移
U0 = K RT 1 + (β − β ) RL
2
θi
K是常数,理想输出值
U 0 = Kθ i
RL/RT越大,误差越小。
8
12.1.2 应变式电阻传感器
当电阻丝受到拉力 F作用时, 将伸长Δ l,横截面积相 应减小Δ A,电阻率因材料晶格发生变形等因素影响而改 变了Δ ρ ,从而引起电阻值变化量为 :
3
12.1.1 电位器
v 又称可变电阻器。作为测量元件,将位移转换为 电压信号。 v 优点: 构造简单,性能稳定,精度较高,信号处 理非常简单。位移传感器的首选元件。 v 缺点: 电刷和电阻元件之间存在滑动摩擦接触, 电刷和电阻元件容易磨损。 v 分类: 线绕式和非线绕式、 旋转式电位器( 多圈 和单圈) 和线位移电位器
εS C= d
35
柱形电容器
12.3 电容式传感器
平板电容器
εS C= pF δ
ε ― 极间介质的介电常数,pF/m S ― 极板的遮盖面积( m²) δ ― 两极板间的距离( m)
36
12.3 电容式传感器 一、 工作原理
平板 电容器如图所示
εS C= d
d,S,ε(εr)变化⇒∆C变化⇒U(I)变化 变间隙d、 变面积S、 变介电常数εr型
6
12.1.1 电位器
三、 电位器的输出特性
测量单方向位移输出电压为单极性电压。图中 RT是电位 器总电阻,1、 2端电阻是βRT。θ i是电刷位置角,也是电位器 角位移。 θ A 是电位器的常数,测角范围。 Ei 是电源, U0 是输 出电压,RL是负载电阻。
U0 = Ei β 1 + (β − β 2 ) RT RL
2 3
2
3
v 无论上移或下移,非线性都将增大。
30
12.2 电感式传感器
为了减小非线性误差,实际测量中广泛采用差动变 隙式电感传感器。
1 2
L1
Ro
δ
3
& U s
Ro
& U o
1— 铁芯; 2— 线圈; 3— 衔铁
L2
2
1
31
12.2 电感式传感器
灵敏度K0为
比较单线圈式和差动式:
∆L L0 2 = K0 = ∆δ δ 0
进一步整理得
dR dl dl = (1 + 2 µ + K y E ) =K R l l
K = 1 + 2µ + K y E
Ky为压阻系数( m2/N),E为弹性模量(N/m2)。
11
12.1.2 应变式电阻传感器
K = 1 + 2µ + K y E
1+2μ: 应变片受力后材料几何尺寸的变化 KyE : 应变片受力后材料的电阻率发生的变化 金属材料: 1+2μ > > KyE 半导体材料: KyE> > 1+2μ K=1+2μ =1~2 K≈KyE=60~170
38
12.3 电容式传感器
二、 结构类型 1.改变遮盖面积的电容式敏感元件 (l) 线位移型电容式敏感元件 基本型 当活动极板沿箭头方向 移动时,遮盖面积S发生变化, 则电容也随之改变,其值为
ε bx Cx = δ
灵敏度为
dCx ε b = δ dx
39
12.3 电容式传感器
(2) 差动线位移型电容式敏感元件 活动极板沿x方向移动,遮盖面积 S1减小, S2增大,电容C1和C2随 之改变,向相反方向变化
20
12.2 电感式传感器
优点: 具有结构简单,工作可靠; 测量精度高,零点稳定; 灵敏、 分辨率高( 位移变化可达0.01µm); 输出功率较大等。 缺点: 灵敏度、 线性度和测量范围相互制约; 传感器自身频率响应低,不适用于快速动态测量。