CATIA运动仿真分析生成运动状态表
CATIA_DMU运动分析

CATIA_DMU运动分析CATIA_DMU(数字机械设计合作环境)是达索系统公司开发的一款计算机辅助设计软件,它提供了一系列功能强大的工具,用于进行机械运动分析。
在设计过程中,通过对机械运动进行模拟和分析,可以评估和优化设计方案,提高产品的性能和可靠性。
CATIA_DMU运动分析提供了几个关键功能,包括逆向动力学分析、正向动力学分析、动力学优化、虚拟样机等。
这些功能使得设计师能够模拟和分析机械在运动过程中的各种力和力矩,以及关节、连杆等部件的运动轨迹和速度。
以下是对CATIA_DMU运动分析的详细介绍。
首先,逆向动力学分析是CATIA_DMU运动分析的核心功能之一、它可以通过给定的位移、速度和加速度,计算出机械系统中各个部件所受的力和力矩。
对于复杂的机械系统,逆向动力学分析可以帮助设计师确定各个部件的负载情况,以及评估系统的性能和可靠性。
通过合理选择部件的材料和尺寸,可以降低系统的应力和降低故障的风险。
其次,正向动力学分析是CATIA_DMU运动分析的另一个重要功能。
它可以根据给定的力和力矩,计算出机械系统中各个部件的运动轨迹和速度。
正向动力学分析可以帮助设计师预测机械系统在运行过程中的性能,例如加速度、速度和停止时间等。
通过优化初始条件和设计参数,可以改进系统的运动性能,并取得更好的控制效果。
此外,动力学优化是CATIA_DMU运动分析的又一个重要功能。
它可以根据设计要求和约束条件,通过调整设计参数,优化机械系统的动力学性能。
动力学优化可以帮助设计师找到最优的设计方案,以实现最佳的性能和效益。
通过不断迭代和优化,可以改善机械系统的稳定性、响应时间和能耗水平等。
最后,虚拟样机是CATIA_DMU运动分析的一个特殊功能。
它可以通过模拟和分析机械系统的运动过程,实现在虚拟环境中对系统进行检查和验证。
虚拟样机可以帮助设计师发现和解决潜在的问题,避免在实际制造和测试过程中出现错误和故障。
通过与其他模块的集成,例如CAD、CAE和CAM,虚拟样机可以提供全面的设计和仿真环境。
CATIA装配运动仿真

CATIA装配运动仿真CATIA是一款广泛应用于机械设计领域的三维设计软件,它提供了丰富的功能和工具,可以帮助工程师们进行装配运动仿真分析。
本文将介绍CATIA装配运动仿真的基本原理和步骤,帮助读者了解如何利用CATIA进行装配运动仿真分析。
一、CATIA装配设计基础在进行装配运动仿真之前,首先要进行装配设计。
装配设计是将各个零部件组装在一起,形成一个完整的装配体。
在CATIA中,可以通过创建组合和约束来完成装配设计。
组合是指将零部件拖拽到装配环境中,并进行位置调整,使其符合实际要求。
约束是指通过添加关系和限制条件,确保各个零部件之间具有正确的运动关系。
二、CATIA装配约束设置在进行装配设计的同时,需要对各个零部件之间的运动关系进行约束设置,以确保装配体在仿真过程中符合实际工作要求。
CATIA提供了多种约束关系,如平行、垂直、配合等。
读者需要根据实际情况选择合适的约束关系,并添加到零部件之间。
三、CATIA运动仿真设置在进行装配设计和约束设置之后,就可以进行CATIA装配运动仿真的设置。
首先,需要添加运动学仿真模块,然后选择仿真类型,如运动分析、碰撞检测等。
接着,读者需要对仿真参数进行设置,如仿真时间、时间步长等。
还可以添加各种外部载荷和动力学约束,以模拟实际工况下的运动情况。
四、CATIA装配运动仿真分析设置好仿真参数后,就可以对装配体进行运动仿真分析了。
CATIA 会模拟装配体在仿真时间内的运动情况,并将结果以动画的形式展现出来。
读者可以观察装配体各个零部件之间的运动关系,检查装配是否符合要求。
同时,CATIA还提供了丰富的分析工具和图表,以帮助读者更深入地了解装配体的运动行为。
五、CATIA装配运动仿真优化通过装配运动仿真分析,读者可以获取装配体的运动数据和性能参数。
根据这些数据,可以进行装配设计的优化。
优化可以包括调整零部件的位置和约束关系,以改善装配体的运动性能。
CATIA提供了优化工具和功能,读者可以利用这些工具进行优化,并进行多次仿真分析,逐步改进装配体的运动行为。
CATIA V5 运动仿真分析
第16章 CATIA 运动分析16.1 曲轴连杆运动分析四缸发动机曲轴、连杆和活塞的运动分析是较复杂的机械运动。
曲轴做旋转运动,连杆左做平动,活塞是直线往复运动。
在用CATIA作曲轴、连杆和活塞的运动分析的步骤如下所示。
(1)设置曲轴、连杆、活塞及活塞销的运动连接。
(2)创建简易缸套机座。
(3)设置曲轴与机座、活塞与活塞缸套之间的运动连接。
(4)模拟仿真。
(5)运动分析。
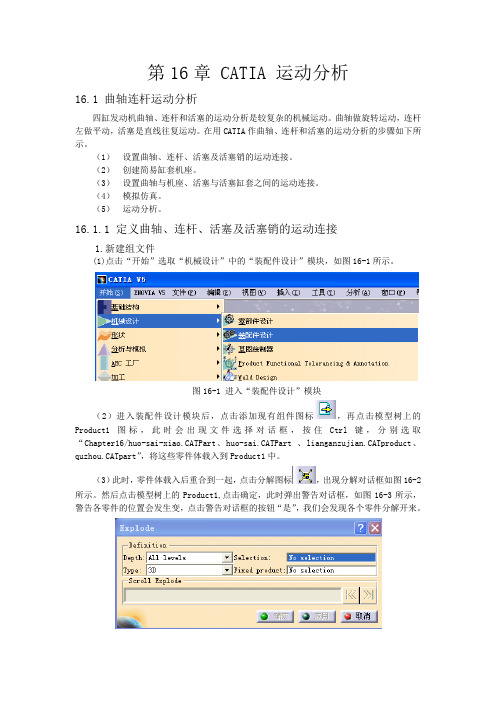
16.1.1 定义曲轴、连杆、活塞及活塞销的运动连接1.新建组文件(1)点击“开始”选取“机械设计”中的“装配件设计”模块,如图16-1所示。
图16-1 进入“装配件设计”模块(2)进入装配件设计模块后,点击添加现有组件图标,再点击模型树上的Product1图标,此时会出现文件选择对话框,按住Ctrl键,分别选取“Chapter16/huo-sai-xiao.CATPart、huo-sai.CATPart 、lianganzujian.CATproduct、quzhou.CATpart”,将这些零件体载入到Product1中。
(3)此时,零件体载入后重合到一起,点击分解图标,出现分解对话框如图16-2所示。
然后点击模型树上的Product1,点击确定,此时弹出警告对话框,如图16-3所示,警告各零件的位置会发生变,点击警告对话框的按钮“是”,我们会发现各个零件分解开来。
图16-2 分解对话框图16-3 警告对话框(3)由于连杆体零件是装配体,各部分之间存在约束,点击“全部更新”按钮,我们会发现连杆体组件恢复装配后的样子。
(4)点击“约束”工具栏中的“相合约束”图标,分别选择活塞销中心线及活塞孔中心线,如图16-4所示。
然后点击“约束”工具栏中的“偏移约束”图标,选择活塞销的一个端面及活塞孔一侧的凹下去细环端面,如图16-5所示,此时出现“约束属性”对话框,如图16-6所示。
将对话框中的“偏移”一栏改为“3.75mm”,点击“确定”按钮,完成活塞销端面和活塞内凹孔细环端面之间的偏移约束关系。
CATIA软件装配中的运动模拟教程

CATIA软件装配中的运动模拟教程CATIA(Computer-Aided Three-dimensional Interactive Application)是一款功能强大的三维建模软件,广泛应用于机械设计、装配与运动仿真等领域。
本教程将为您介绍CATIA软件在装配过程中的运动模拟功能,帮助您更好地理解和应用这一功能。
第一步:打开CATIA软件并创建装配文件在开始之前,首先确保您已经正确安装了CATIA软件。
打开软件后,选择“新建”,然后在弹出的对话框中选择“装配设计”。
第二步:导入零部件文件在装配过程中,我们需要导入零部件文件以进行后续的装配和运动模拟操作。
点击“导入”按钮,选择待导入的零部件文件,并将其添加到装配设计中。
第三步:创建关系在装配文件中,我们需要为不同零部件之间创建适当的关系,以确保它们按照预期方式进行运动。
选择“约束”工具,在零部件之间创建合适的约束关系,例如定位、配合等。
第四步:设置运动学属性在进行运动模拟之前,我们需要为每个零部件设置相应的运动学属性。
选择“属性”工具,为每个零部件设置正确的运动学类型,如旋转、平移等。
第五步:创建运动学关系运动学关系用于定义零部件之间的运动方式,将其连接起来形成一个整体模型。
选择“运动学”工具,在零部件之间创建适当的运动学关系,如齿轮、凸轮等。
第六步:设置运动规则在第五步中创建了运动学关系后,我们需要为整个装配定义运动规则。
选择“运动规则”工具,设置适当的约束和限制条件,以确保装配在运动模拟中的行为符合真实情况。
第七步:进行运动仿真完成以上准备工作后,我们可以开始进行运动仿真了。
选择“运动仿真”工具,在CATIA软件中模拟装配的运动过程,并观察各个零部件的运动轨迹、速度和加速度等参数。
第八步:分析运动仿真结果当运动仿真完成后,我们可以对仿真结果进行分析和评估。
CATIA 软件提供了丰富的可视化和数据分析工具,帮助我们深入了解装配过程中的运动性能和互动关系。
优选CATIA实用DMU运动仿真小教程

一、功能介绍
模块简介
功能键一览表
过程 将装配件导入DMU模块----建立机械装置----分析运动结合类型 ----建立运动结合----约束固定件----设置驱动形式----运动仿真
运动仿真有两种: 1、使用命令进行模拟 (可编辑传感器) 2、模拟 (可生成自动播放动画,也可编辑传感器)----可通 过编译模拟 ,生成重放 。
4. 固定零件
单机
中的 按钮,弹出右图所示窗口
,然后直接左键单击壳体part,这时系统会出现“可以模拟机
械装置”提示,点击确定
5、设置驱动形式
注意此时机械装置自由度=0,若不为0不能仿真 的,此项尤为重要。 修改: 下限改为-65°;上限改为0°
6、使用命令进行模拟
点击
中的 (使用命令
进行模拟)按钮,弹出右图所示窗口,电机“模
(4)其他约束 用旋转指令 将以下几个产品之间互相约束一起来。 ①、“波轮与连杆”;旋转副 ②、“连杆与风门连杆”;旋转副 ③、“风门连杆与壳体”;旋转副
壳体 波轮
连杆 命令在运动机构里面,点击其图标右下方的箭 头,点击后,选择图标
然后点击“风门连杆”跟“风门”
(3)约束 图中直线1、直线2、平面1、平面2,依次 选取壳体轴线、波轮轴线、壳体平面、波 轮平面,并单击“偏移”与“驱动角度”按 钮。单击确定
机械装置:运动机构名称 结合名称:运动副名称 直线1:波轮轴 直线2:壳体轴 平面1:破轮平面 平面2:壳体平面 驱动角度:点选可驱动波轮转动角度. (注意:驱动点选后自由度-1)
拟下的立刻”按钮,便可拖动上面的游标随意旋
转,也可使用“按需要”命令,修改一下右上角数
字框中的数据,就可点击下方的 箭头标示
CATIA 运动实例解析

CATIA钻床运动仿真实例
第一步:打开CATIA 进入“开始”——“机械设计”——“装配设计”
点击“相合约束”选中图示两零件的轴线
让后点击“全部更新”按钮生成装配体
可以通过“操作”命令把零件移动到适当的位置。
第二步:打开“开始”——“数字化装配”——“DMU运动机构”
单击“装配约束转换”得到如下结果
令激活,单击“自动创建”的到如下的模型树
双击模型树中的“圆柱面,1(yaobi,1,dizuo,1)出现图中所示的对话框
选中对话框中的”驱动角度“以及“驱动长度”按钮可以进行数据的修改。
得到两个命令“命令,1”,“命令,2”
单击“固定零件”选中底座点击“确定”后弹出“可以模拟机械装置”
单击“使用命令进行模拟”,””””弹出如下对话框”在点击黑色三角形按钮并在”“命令,1”“命令,2”后面的框中输入需要的值就可以继续点击三角形按钮进行模拟了!!
祝,,学习愉快!。
CATIA航空产品设计与制造课件:运动仿真
运动仿真
1
工程图基础
2
视图的创建
3
三维尺寸标注
CONTENTS
目
录
项目
1
运动机构仿真基础
进入运动机构仿真工作台 运动机构仿真结构树
运动机构仿真基础
1.1 概述
运动机构仿真基础
1.2进入运动机构仿真模块
运动机构仿真基础
用户界面:运动机构仿真
运动机构仿真基础
结构树:运动பைடு நூலகம்构仿真
运动机构仿真 3.1 运动机构仿真
运动机构仿真基础 3.2 定义固定部件
运动机构仿真基础 3.3 机构运动副的添加
运动机构仿真基础
运动机构仿真基础
运动机构仿真基础
运动机构仿真基础 3.4 驱动命令的添加
运动机构仿真基础
运动机构仿真基础 3.5 机制修饰的添加
运动机构仿真基础 3.6 驱动命令添加规则
➢ 点和曲面副
运动副的创建
➢ 滑动曲线副
运动副的创建
➢ 滚动曲线副
运动副的创建
➢ 点、曲面副
运动副的创建
➢ 万向节副
运动副的创建
➢ CV关联副
运动副的创建
➢ 齿轮副
运动副的创建
➢ 齿条副
运动副的创建
01 02 03
➢ 课程导学 ➢ 课程录屏
项目
3
运动机构仿真
运动机构仿真一般步骤 运动机构副的添加 运动机构仿真
运动机构仿真基础
运动机构仿真基础
运动机构仿真基础 3.7 使用命令或者规则进行机构仿真
运动机构仿真基础
运动机构仿真基础
运动机构仿真基础
运动机构仿真基础 3.8 运动机构仿真的记录和回放
CATIA运动分析(DMU)
CATIA运动分析
编制
校对
审核
批准
目 录
1、运动分析模块介绍 2、基础介绍 3、命令介绍 4、注意事项 5、举例
运动分析培训
1、本模块为数字模型运动分析模块
对于可以运动的机构,在数据中做出机构的运动状态分析,是十分基本而且重要 的功能。DMU KINEMATICS单元中,我们可以依照运动学的原理,通过约束自由度 的方式建立机构,并且分析机构的运动状态与移动轨迹。 进入DMU KINEMATICS模块
运动分析培训
3.6 POINT SURFACE JOINT(点-曲面接头)
该命令可以约束1个自由度 通过点-面接头,可以让一个点在一个平面上移动。点与曲面分别位于不同的零件上, 如此零件即顺着曲面的弧度与高低而移动。设置此接头时,点必须位于曲面上,即点与 曲面的距离为零,因此要在assembly design中进行好组装再使用此接头。
3、常用命令介绍
3.1 revolute(实体接头)
该命令可以约束5个自由度 该命令用两零件之间的线和面作为约束条件,两线必须同轴,面可以不重合,选择 即可。两个零件之间的同轴旋转运动,可以用该命令约束。约束完毕添 加角度驱动 即可以实现运动功能。
运动分析培训
3.2 CYLINDER JOINT(圆柱接头)
4.用球头连接雨刮和 雨刮连杆 雨刮part11.1
运动分析培训
雨刮part11.1
雨刮骨架part3.1
5.实体连接连接雨刮 骨架和雨刮
运动分析培训
现在所有约束mechanism中 DOF=2() 红框)还有两个自由度。除去驱动 所需的一个自由度以外还剩余一个 自由度。
运动分析培训
加上驱动去掉一个约束 用点在面上约束掉一个自由度
CATIA 运动模拟操作步骤
8 各参数间的关系曲线
1) 采用另一例。点 ,出现规则运动模拟对话框,如图 17 所示; 2) 点 ,选择模拟时间; 3) 勾选“激活传感器”,出现传感器对话框,如图 18 所示,将选择集中的激活
状态由“否”改为“是”; 4) 点选图 18 中,输出集中的“选项”按钮,出现图 19,图形选项对话框(与
图 23 所示。
图 17 运动模拟对话框
11
图 18 传感器对话框
图 19 图形选项图框 图 20 自定义创建曲线对话框
12
图 21 新建曲线.1 图 22 传感器对话框
13
图 23 曲线.1 图形
14
面
性
接
接
接
接
合
接
接
合
合
合
合
合
合
点
滑
滚
曲
动
动
线
曲
曲
接
线
线
合
接
接
合
合
点通 曲用 面接 接合 合
接 合
CV
齿 轮 接 合
齿
电
基
轮
缆
于
齿
接
轴
条
合
接
接
合
合
2)按连接类型要求选择相应的接合 棱形接合示例操作: a) 点选棱形接合后,出现图 3 棱点确定(注意:如果是驱动约束需勾
所示。点确定,确定完成公式编辑;(注意:对于旋转运动应输入“/1s*20deg”,
表示旋转角速度为 20deg/s)
图 9 选择机械装置.1
7
图 10 公式对话框
图 11 公式编辑器对话框
8
图 12 公式编辑器中输入参数
CATIA_DMU运动分析报告
1产品介绍DMU机构运动分析(Kin)是专门做DMU装配运动仿真的模块。
针对大型产品如整车、飞机、轮船等的机构运动状态进行评价。
2图标功能介绍(基本概念、基本界面介绍)2.1DMU运动仿真(DMU Simulation)工具条命令驱动仿真(Simulating with Commands)规则驱动仿真(Simulating With Laws)机构修饰(Mechanism Dressup)创建固定副(Fixed Part)装配约束转换(Assembly Constraints Conver)测量速度和加速度(Speeds and Accelerations)机构分析(Mechanism Analysis)2.2DMU运动副创建工具条(Kinematics Joints)创建转动副(Creating Revolute Joints)创建滑动副(Creating Prismatic Joints)创建同轴副(Creating Cylindrical Joints)创建球铰连接(Creating Spherical Joints)创建平动副(Creating Planar Joints)创建刚性副(Rigid Joints)点-线副(Point Curve Joints)曲线滑动副(Slide Curve Joints)点-面副(Point Surface Joints)万向节(Universal Joints)CV连接(CV Joints)创建齿轮副(Gear Joints)滑动-转动复合运动副(Rack Joints)滑动-滑动复合运动副(Cable Joints)用坐标系法建立运动副(Creating Joints Using Axis Systems)2.3DMU Generic Animation创建运动仿真记录(Simulation)生成重放文件(Generate Replay)重放(Replay)仿真播放器(Simulation Player)编辑序列(Edit Sequence)包络体(Swept Volume)生成轨迹线(Trace)2.4机构刷新(DMU Kinematics Update)机构位置刷新(Update)输入子机构(Import Sub-Mechanisms)重设位置(Reset Positions)2.5干涉检查模式工具条(Clash Mode)关闭干涉检查(C lash Detection(Off))打开干涉检查(C lash Detection(On))遇到干涉停止(C lash Detection(Stop))2.6DMU 空间分析(DMU Space Analysis)干涉检查(Clash)距离和距离带分析(Distance and band analysis)3功能详细介绍3.1DMU运动仿真(DMU Simulation)工具条3.1.1用命令驱动仿真(Simulating with Commands)是用命令驱动的方式对已创建的机构进行运动仿真,这种方法比较直接、简便,但不能记录下来。