catia v5R21运动仿真步骤
CATIA运动仿真实例

§3 发动机工作部件运动仿真实例
6.添加第2个旋转接合
隐藏
§3 发动机工作部件运动仿真实例
7.添加第1个圆柱接合
§3 发动机工作部件运动仿真实例
8.添加第1个菱形接合
§3 发动机工作部件运动仿真实例
9.添加第5个刚性接合
§3 发动机工作部件运动仿真实例
10.添加第3个旋转接合
§3 发动机工作部件运动仿真实例
三维软件-CATIA
第八章 CATIA V5R20运动仿真分析 §1 DUM技术概述
§2 发动机工作部件运动仿真实例
§1 DUM技术概述
DUM是英文“Digital Mock-Up”的简称,中文 意思为“电子样机”,DUM是使用计算机对产品进 行真实化模拟,以满足产品的各种功能。通过 CATIA,建立完整的产品数字化样机模型,为产品 和流程开发以及从产品概念设计到产品维护整个产 品生命周期的信息交流和决策提供一个平台。
11.添加第2个圆柱接合
§3 发动机工作部件运动仿真实例
12.添加第2个菱形接合
§3 发动机工作部件运动仿真实例
4.添加驱动
双击
§3 发动机工作部件运动仿真实例
§3 发动机工作部件运动仿真实例
5.运动模拟
单击观察运动
§3 发动机工作部件运动仿真实例
6.定义速度和加速度
§3 发动机工作部件运动仿真实例
7.创建速度和加速度分析曲线
观察运动
见下页
§3 发动机工作部件运动仿真实例
7.创建速度和加速度分析曲线
§3 发动机工作部件运动仿真实例
8.创建活塞速度/加速度与时间关系的表格
DUM 提供了强大的可视化手段,具备各种功 能检测手段,如安装/拆除 、机构运动、干涉检查等, 具备产品的结构配置和信息交流功能。
CATIA软件装配中的运动模拟教程

CATIA软件装配中的运动模拟教程CATIA(Computer-Aided Three-dimensional Interactive Application)是一款功能强大的三维建模软件,广泛应用于机械设计、装配与运动仿真等领域。
本教程将为您介绍CATIA软件在装配过程中的运动模拟功能,帮助您更好地理解和应用这一功能。
第一步:打开CATIA软件并创建装配文件在开始之前,首先确保您已经正确安装了CATIA软件。
打开软件后,选择“新建”,然后在弹出的对话框中选择“装配设计”。
第二步:导入零部件文件在装配过程中,我们需要导入零部件文件以进行后续的装配和运动模拟操作。
点击“导入”按钮,选择待导入的零部件文件,并将其添加到装配设计中。
第三步:创建关系在装配文件中,我们需要为不同零部件之间创建适当的关系,以确保它们按照预期方式进行运动。
选择“约束”工具,在零部件之间创建合适的约束关系,例如定位、配合等。
第四步:设置运动学属性在进行运动模拟之前,我们需要为每个零部件设置相应的运动学属性。
选择“属性”工具,为每个零部件设置正确的运动学类型,如旋转、平移等。
第五步:创建运动学关系运动学关系用于定义零部件之间的运动方式,将其连接起来形成一个整体模型。
选择“运动学”工具,在零部件之间创建适当的运动学关系,如齿轮、凸轮等。
第六步:设置运动规则在第五步中创建了运动学关系后,我们需要为整个装配定义运动规则。
选择“运动规则”工具,设置适当的约束和限制条件,以确保装配在运动模拟中的行为符合真实情况。
第七步:进行运动仿真完成以上准备工作后,我们可以开始进行运动仿真了。
选择“运动仿真”工具,在CATIA软件中模拟装配的运动过程,并观察各个零部件的运动轨迹、速度和加速度等参数。
第八步:分析运动仿真结果当运动仿真完成后,我们可以对仿真结果进行分析和评估。
CATIA 软件提供了丰富的可视化和数据分析工具,帮助我们深入了解装配过程中的运动性能和互动关系。
CATIA V5 R20运动仿真

运动仿真学习情况1——旋转副;可以单独驱动,驱动的是旋转角度;只能实现绕自身的轴旋转;√2——棱形副;可以单独驱动,驱动是滑动长度;只能实现沿着公共线滑动;√3——圆柱副;可以单独驱动,可以同时驱动是滑动长度和旋转角度,这两个驱动添加后就可以运动了;只能实现绕轴旋转并沿轴线滑动;√4——螺钉副;可以单独驱动,实现实体每转动1圈,就前进多少mm。
不一定非要是螺杆和螺母,其他的旋转前进仿真也可以使用该命令。
6——平面副;不可以单独驱动,约束一公共平面,具有除沿平面法向移动及绕平面坐标轴转动外的3个运动自由度√7——点曲线副;不可以单独驱动,只能由其他运动副带动起来;点必须在曲线的上面,不在就是不行,实现点在曲线,也就是点在轨迹线上走动。
√8——滑动曲线;不可以单独驱动,只能由其他运动副带动起来;约束两轨迹线相切,实现线在线上滑动;√9——滚动曲线;不可以单独驱动,只能由其他运动副带动起来;约束两轨迹线相切,实现线在线上滑动;√10——点曲面;√不知道他与点曲线有何区别?11——U形结合;√3条轴线相交且位于同一平面内,且输入、输出端轴线与中间轴轴线夹角相同时,可以使用该命令13——齿轮接合;注意齿轮接合的对象不一定是齿轮,只要是一个旋转体带动另一个旋转体的话,就可以使用齿轮接合。
14——齿轮齿条:对旋转副和棱形副进行约束,有个比率15——电缆;√16——刚性结合;√17——使用命令进行模拟√18——使用法则曲线进行模拟√19——机械装置修饰20——装配约束转换√22——分析机械装置23——模拟24——编辑模拟25——重放26——模拟播放器27——编辑序列28——扫略包络体29——轨迹30——重置位置:√仿真的注意点如下:1——驱动对象的选择是有原则的;不可以随便选择,必须符合实际的运动情况;当定义驱动对象时,驱动对象也是有原则的,比如我们在定义旋转副的驱动对象时,如果要求我们的驱动对象进行360度全周旋转的话,那么的我们的对象在实际情况中必须能够或者说可以旋转360度,在整个运动机构当中并不是所有的旋转副都可以旋转360度,有的只能旋转几度,,因此一定要搞清楚哪个对象可以旋转360度,搞清楚这个事情后在去将他定义为驱动对象,如果对象本身不可能旋转360度,而你要把他定义为驱动,还要他旋转360度的话,这样的运动仿真是不成功的。
优选CATIA实用DMU运动仿真小教程

一、功能介绍
模块简介
功能键一览表
过程 将装配件导入DMU模块----建立机械装置----分析运动结合类型 ----建立运动结合----约束固定件----设置驱动形式----运动仿真
运动仿真有两种: 1、使用命令进行模拟 (可编辑传感器) 2、模拟 (可生成自动播放动画,也可编辑传感器)----可通 过编译模拟 ,生成重放 。
4. 固定零件
单机
中的 按钮,弹出右图所示窗口
,然后直接左键单击壳体part,这时系统会出现“可以模拟机
械装置”提示,点击确定
5、设置驱动形式
注意此时机械装置自由度=0,若不为0不能仿真 的,此项尤为重要。 修改: 下限改为-65°;上限改为0°
6、使用命令进行模拟
点击
中的 (使用命令
进行模拟)按钮,弹出右图所示窗口,电机“模
(4)其他约束 用旋转指令 将以下几个产品之间互相约束一起来。 ①、“波轮与连杆”;旋转副 ②、“连杆与风门连杆”;旋转副 ③、“风门连杆与壳体”;旋转副
壳体 波轮
连杆 命令在运动机构里面,点击其图标右下方的箭 头,点击后,选择图标
然后点击“风门连杆”跟“风门”
(3)约束 图中直线1、直线2、平面1、平面2,依次 选取壳体轴线、波轮轴线、壳体平面、波 轮平面,并单击“偏移”与“驱动角度”按 钮。单击确定
机械装置:运动机构名称 结合名称:运动副名称 直线1:波轮轴 直线2:壳体轴 平面1:破轮平面 平面2:壳体平面 驱动角度:点选可驱动波轮转动角度. (注意:驱动点选后自由度-1)
拟下的立刻”按钮,便可拖动上面的游标随意旋
转,也可使用“按需要”命令,修改一下右上角数
字框中的数据,就可点击下方的 箭头标示
CATIA-V5-运动仿真分析
第16章 CATIA 运动分析16.1 曲轴连杆运动分析四缸发动机曲轴、连杆和活塞的运动分析是较复杂的机械运动。
曲轴做旋转运动,连杆左做平动,活塞是直线往复运动。
在用CATIA作曲轴、连杆和活塞的运动分析的步骤如下所示。
(1)设置曲轴、连杆、活塞及活塞销的运动连接。
(2)创建简易缸套机座。
(3)设置曲轴与机座、活塞与活塞缸套之间的运动连接。
(4)模拟仿真。
(5)运动分析。
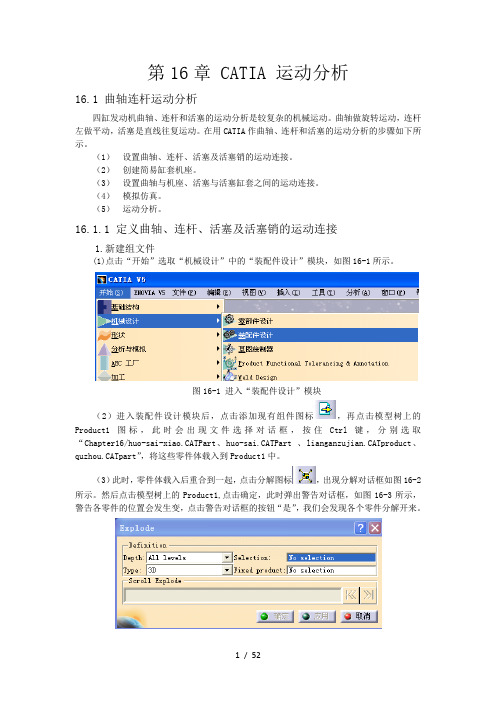
16.1.1 定义曲轴、连杆、活塞及活塞销的运动连接1.新建组文件(1)点击“开始”选取“机械设计”中的“装配件设计”模块,如图16-1所示。
图16-1 进入“装配件设计”模块(2)进入装配件设计模块后,点击添加现有组件图标,再点击模型树上的Product1图标,此时会出现文件选择对话框,按住Ctrl键,分别选取“Chapter16/huo-sai-xiao.CATPart、huo-sai.CATPart 、lianganzujian.CATproduct、quzhou.CATpart”,将这些零件体载入到Product1中。
(3)此时,零件体载入后重合到一起,点击分解图标,出现分解对话框如图16-2所示。
然后点击模型树上的Product1,点击确定,此时弹出警告对话框,如图16-3所示,警告各零件的位置会发生变,点击警告对话框的按钮“是”,我们会发现各个零件分解开来。
图16-2 分解对话框图16-3 警告对话框(3)由于连杆体零件是装配体,各部分之间存在约束,点击“全部更新”按钮,我们会发现连杆体组件恢复装配后的样子。
(4)点击“约束”工具栏中的“相合约束”图标,分别选择活塞销中心线及活塞孔中心线,如图16-4所示。
然后点击“约束”工具栏中的“偏移约束”图标,选择活塞销的一个端面及活塞孔一侧的凹下去细环端面,如图16-5所示,此时出现“约束属性”对话框,如图16-6所示。
将对话框中的“偏移”一栏改为“3.75mm”,点击“确定”按钮,完成活塞销端面和活塞内凹孔细环端面之间的偏移约束关系。
CATIA 运动模拟操作步骤
5 定义驱动元件的参数关系
1) 选择“机械装置.1”,如图 9 所示;
2) 点 ,出现公式对话框,如图 10 所示;
3) 选择长度,点“编辑公式”,出现公式编辑器对话框,如图 11 所示;在词典
中选择“参数”,参数成员中选择“时间”,时间成员中选择“
”,
双击该关系值进入公式等号后的文本框中;
4) 在其后输入“/1s*20mm”;其意义表示滑块的移动速度为 20mm/s;如图 12
10
8 各参数间的关系曲线
1) 采用另一例。点 ,出现规则运动模拟对话框,如图 17 所示; 2) 点 ,选择模拟时间; 3) 勾选“激活传感器”,出现传感器对话框,如图 18 所示,将选择集中的激活
状态由“否”改为“是”; 4) 点选图 18 中,输出集中的“选项”按钮,出现图 19,图形选项对话框(与
图 4 棱形接对话窗口选项
4
图 5 棱形连接
图 6 选择固定零件
4 运动模拟
点 出现运动模拟对话框,如图 7 所示,用鼠标左键移动命令后的滑条即可 对机构进行运动模拟了。点 ,出现“滑块:命令.1”对话框,可以对最大、
5
最小值,增量值进行调整,如图 8 所示;
图 7 运动模拟对话框
图 8 滑块命令对话框
所示。点确定,确定完成公式编辑;(注意:对于旋转运动应输入“/1s*20deg”,
表示旋转角速度为 20deg/s)
图 9 选择机械装置.1
7
图 10 公式对话框
图 11 公式编辑器对话框
8
图 12 公式编辑器中输入参数
6 使用规则曲线进行模拟
1) 点 ,出现规则运动模拟对话框,如图 13 所示; 2) 选择合适的步骤数,按“向前”、“向后”等运动模拟按钮即可实现规则运动
CATIA运动仿真教程
Crankslider Mechanism TutorialProblem StatementThe purpose of this exercise is to use the IntelliMotion Builder to demonstrate the procedure for configuring the mechanism and to then check for interference.Arm Link1Link2CardanCollarThe mechanism comprises of a crank connected via link1 and a universal joint (cardan component) to the Arm component to provide an oscillatory motion. This in turn is connected via another link to a collar that slides back and forth on a shaft.Step 1 Open Model & Set WorkbenchYou will need to run the DDMV5R7 or DDMV5R8 profile shortcut to enable the Dynamic Designer Workbench.Open the product file crankslider_tutorial.CATProduct located in the crankslider sub-folder in the tutorials directory of the installation.If your workbench is not already set to Dynamic Designer (look at the Workbench icon at the top right hand side of the toolbar), then activate the Dynamic Designer Workbench under START – DIGITAL_MOCKUP – DYNAMIC DESIGNER.The Dynamic Designer commands can be accessed via the toolbar icons or the pull down menu (see below)Step 2 Create Mechanism from AssemblyTo auto create the mechanism from the assembly, click on the Convert Mechanism Icon . This will bring up a dialog box asking if you want to convert the assembly constraints when the mechanism is created. Make sure this option is selected before proceeding.The Screen should now look like that below where there are motion entity icons on the graphics screen.Expand the treeview to show the APPLICATIONS – DYNAMIC DESIGNER branches. You should see the following mechanism data:Note that the assembly constraints have been mapped to Dynamic Designer joints and that the grounded parts in the assembly have been automatically made grounded in Dynamic Designer.Step 2 Default Simulation SettingsThe Dynamic Designer Settings can be accessed from two locations.Global settings can be found in the Catia OPTIONS dialog (TOOLS – OPTIONS menu selection)These setting are applied to future mechanisms in different assemblies. We will not be changing these for this exercise, but this is useful to be aware of.Model specific settings can be found by expanding the APPLICATIONS BRANCH of the Catia Treeview, and under the Dynamic Designer Branch, right clicking on the MOTION MODEL branch and selecting the PROPERTIES option. This option can only be done once a mechanism has been started (i.e. a moving or ground part exist). You can also access mechanism settings from the MOTION – MECHANISM settings.We need to change the direction of gravity to match the orientation the model was built in. In this case gravity must act in the –X axis direction. To change this, click on the direction pull down list and select the Standard –X option.STEP 3 Define MotionThe complete mechanism is not designed to operate under gravity, so we need to provide input motion representing a motor connected to the system. Because the joints define how the parts move with respect to one another, we apply motion to the joints as it is clear in which directions the parts can move.To drive the crankslider, we are going to put a motion on the cylindrical joint connecting the Crank to the Crank Housing. In the image shown below, this is joint 4. Please expand the branch under the joint to verify the joint selected is the correct one.Do add a motion, double click on this joint (i.e. Joint.4 in above images) in either the treeview or in the graphics window.Change the MOTION ON from TRANSLATE Z to ROTATE ZChange the MOTION TYPE from FREE to VELOCITYSpecify a CONSTANT velocity of 360 DEG/SECMake sure you click on the RED tick to accept the value change.Press OK to accept the motion definition. You should now see an arrow on the joint in the graphics window.STEP 4 Run SimulationWe are ready to run the simulation. From the MOTION menu select the SIMULATE option to set the simulation settings and to run the solver. Alternatively, you can click on the toolbar icon.Leave the simulation time at 1 seconds and the number of frames at 60. Click on the START button to run the simulations.Once the simulation completes, the analysis dialog will close automatically.STEP 5 Review AnimationWe can now review the results. As part of the simulation, a replay object is automatically generated. You can view the replay by expanding the REPLAY branch at the bottom of the treeview, or by clicking on the toolbar icon.Once the Replay dialog appears, you can review the motion and do all the standard option available in replay like save the animation to file, add an interference analysis, or check for clearances.STEP 6 Interference DetectionInterference checking is done using the DMU utilities in Catia. The first step is to define a DMU Clash Analysis.From the MOTION menu, select the CLASH option. This will bring up the DMU Check Clash dialog.Leave Clash Type as Contact + Clash, but change the selection option to Between Two Selections.Select LINK1 for the Selection1, change focus to Selection 2 and select the ARM componentPress OK to accept and keep this.Arm – Selection 2Link1 –Selection 1To run the analysis, display the REPLAY object . You can view the replay by expanding the REPLAY branch at the bottom of the treeview, or by clicking on the toolbar icon.Click on the EDIT ANALYSIS optionClick on the ADD button to add an analysis to the replay object.Select the Interference.1 analysis to add and press OK. Press OK again to complete adding analyses. On the Replay dialog, change the Interference option from OFF to ON.Press the PLAY button to replay the motion and check for interference while animating (You may notice the parts highlighting while this is happening. This means that clash exists between the parts at that result frame). Once the animation has finished, you will find a new branch under the Replay object called Interference Results.1.You can Double click on this object to review the interference results.NOTE: In some versions of Catia, the interference is not being detected where the lugs are cutting into the side of the arm, even though these parts are highlighted while the analysis is being done.STEP 10 Change Geometry and Re-simulateTo correct the problem, we need to change the geometry of the arm. We will place fillets on the vertical edges of the arm between the two lugs.Double click on the arm to go into part edit mode.From the toolbar select the Edge Fillet icon.Specify a Fillet radius of 0.375 inches (or 9.525 mm)Pick on the 2 vertical edges shown below (you will see the proposed face edges in pink)Press OK to accept the fillets. The geometry should now look like:Return to the Dynamic Designer Workbench by double clicking on the PRODUCT level of the treeview. Repeat the interference check and you should now find that no interference occurs.This concludes the tutorial。
CATIA模型仿真
CATIA模型仿真CATIA是一种专业的三维设计软件,广泛应用于航空、汽车、机械等行业。
在设计过程中,模型仿真是不可或缺的一环,它可以帮助工程师评估设计的性能和可行性。
本文将介绍CATIA模型仿真的原理和应用,以及如何进行模型仿真。
一、CATIA模型仿真的原理CATIA模型仿真是基于有限元分析原理的,有限元分析通过将复杂的物体划分成许多个小单元,通过求解各个小单元的力学方程得到整体的力学响应。
CATIA模型仿真主要包括以下步骤:1. 几何建模:在CATIA中,首先需要进行几何建模,即创建物体的几何模型。
这可以通过绘制、拉伸、旋转等操作完成。
2. 材料属性定义:在进行模型仿真前,需要定义材料的力学性质,比如弹性模量、密度等。
CATIA提供了丰富的材料数据库,可以选择合适的材料属性。
3. 网格划分:将几何模型划分成小单元网格,即有限元网格。
网格划分的精细程度决定了计算的准确性和计算速度。
4. 载荷和边界条件定义:在模型仿真前,需要定义载荷和边界条件,即作用在模型上的力、压力、约束等。
这些载荷和边界条件可以通过计算得到,也可以通过实验测量得到。
5. 求解计算:通过有限元分析方法求解模型的力学响应。
CATIA会自动计算每个小单元的应力、应变等参数,并将结果转化为整体的力学响应。
6. 结果分析:CATIA提供了丰富的结果分析工具,可以对仿真结果进行查看、分析和后处理。
比如通过云图、剖面图、动画等方式直观地展示模型的力学响应。
二、CATIA模型仿真的应用CATIA模型仿真在各个领域都有广泛的应用,包括航空航天、汽车、机械等。
以下是几个典型的应用案例:1. 航空航天领域:在飞机结构设计中,CATIA模型仿真可以帮助工程师评估飞机在各种载荷条件下的强度和刚度。
通过对机翼、机身等部件进行仿真分析,可以优化结构设计,提高飞机的安全性和性能。
2. 汽车领域:CATIA模型仿真可以应用于汽车的碰撞仿真、结构强度仿真、疲劳寿命仿真等方面。
CATIA实用DMU运动仿真小教程 PPT
4、 固定零件
单机
中的 按钮,弹出右图所示窗口,
然后直截了当左键单击壳体part,这时系统会出现“能够模拟
机械装置”提示,点击确定
5、设置驱动形式
注意此时机械装置自由度=0,若不为0不能仿确实, 此项尤为重要。 修改: 下限改为-65°;上限改为0°
6、使用命令进行模拟
点击
中的 (使用命令进
行模拟)按钮,弹出右图所示窗口,电机“模拟下的
(4)其他约束
用旋转指令
将以下几个产品之间互相约束一起来。
①、“波轮与连杆”;旋转副
②、“连杆与风门连杆”;旋转副
③、“风门连杆与壳体”;旋转副
壳体 波轮
连杆 风门连杆 风门
(5)刚性结合“风门与风门连杆” 命令在运动机构里面,点击其图标右下方的箭 头,点击后,选择图标
然后点击“风门连杆”跟“风门”
2、 打开模块 通过“开始(S)”——“数字化装配”——“DMU 运动机构”
3. 约束(旋转副) 进入到运动仿真的模式下,开始进行仿真设置: (1)对装配部件进行约束设置,命令在运动机构里面,点击 其图标右下方的箭头,点击后,选择图标
(2)旋转结合—创建机械装置 ①、点击 按钮,弹出右图1窗口; ②、点击右上角“新机械装置”,弹出图2窗口; ③、单击“确定”按钮,弹出图3窗口;
点击上面的黑色开始键。
8、过程分析
在仿真运动过程中,点击
中
的 按钮,下拉碰撞模式列表
;
便可选择干涉来检查运动机构。
9、视频制作 用第三方软件录制视频
干涉显示
三、作业
要求: 可使波轮机构进行模拟运转。 方法二选一:1、使用命令进行模拟 2、动画模拟
下载地址:
catia运动仿真步骤
1.仿真之前的准备将要仿真的模型所需的部件在装配模式下按照技术要求进行装配。
装配时请注意,在能满足合理装配的前提下,尽量少用约束,以免造成约束之间互相干涉,影响下一步运动仿真。
2.运动仿真通过“开始(S)”——“数字模拟”——“DMU Kinematics”进入到运动仿真的模式下,开始进行仿真设置:(1)先建立一个新机制(New Mechanism);命令在“插入(I)”菜单下,(2)对装配部件进行约束设置,命令在旋转铰里面,点击其图标右下方的箭头,点击后,出现所有铰定义图标按顺序分别是:旋转铰(Revolute joint),棱镜铰(prismatic joint),圆柱铰(Cylinderical joint),螺纹铰(Screw joint),球铰(Spherical joint),平面滑动铰(Planner joint),刚性连接(Rigid joint),点-线铰,滑动曲线铰,滚动曲线铰,点-曲面铰,万向节铰,双万向节铰,齿轮铰,齿轮-齿条铰,缆绳铰,坐标系铰。
各个铰接的的方法见文献《CATIA 机械运动分析与模拟实例》,上有很详细的介绍。
(3)设置固定件,点击固定零件图标,点击后出现New Fixed Part(新固定零件)对话框,不用理它,在图形区选择要固定的零件即可。
各种铰链设置合理,系统会自动提示:,也就是说,机制可以仿真了。
(a.)仿真使用“命令模拟”时,点击,就会出现运动模拟对话框,在对话框内拖动鼠标,由大到小或有小到大改变角和实数的范围,然后点击下面的黑色开始键,就可以看到仿真运动了。
对话框示例如下(b.)仿真采用“模拟”时,点击,即可进入和将动画视点和自动插入都选上后,用鼠标拖动command 后的命令块由大到小或由小到大改变角和实数的范围,然后点击下面的黑色开始键,就可以看到仿真运动了下面以齿轮运动仿真为例说明:装配过程不多说了,直接进入仿真模块下。
分析:构成:主动齿轮,从动齿轮,侧板使两齿轮运动起来,要用到一个新机制,新机制里有一个齿轮铰,两个旋转铰,一个固定铰,一个驱动。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
1.仿真之前的准备
将要仿真的模型所需的部件在装配模式下按照技术要求进行装配。
装配时请注意,在能满足合理装配的前提下,尽量少用约束,以免造成约束之间互相干涉,影响下一步运动仿真。
2.运动仿真
通过“开始(S)”——“数字模拟”——“DMU Kinematics”
进入到运动仿真的模式下,开始进行仿真设置:
(1)先建立一个新机制(New Mechanism);命令在“插入(I)”
菜单下,
(2)对装配部件进行约束设置,命令在旋转铰里面,点击其图标右下方的箭头,点击后,出现所有铰定义图标
按顺序分别是:旋转铰(Revolute joint),棱镜铰(prismatic joint),圆柱铰(Cylinderical joint),螺纹铰(Screw joint),球铰(Spherical joint),平面滑动铰(Planner joint),
刚性连接(Rigid joint),点-线铰,滑动曲线铰,滚动曲线
铰,点-曲面铰,万向节铰,双万向节铰,齿轮铰,齿轮-齿条
铰,缆绳铰,坐标系铰。
各个铰接的的方法见文献《CATIA 机械运动分析与模拟实例》,上有很详细的介绍。
(3)设置固定件,点击固定零件图标,点击后出现New Fixed Part(新固定零件)对话框
,不用理它,在图形区选择要固定的零件即可。
各种铰链设置合理,系统会自动提示:
,也就是说,机制可以仿真了。
(a.)仿真使用“命令模拟”时,点击,就会出现运动模拟对话框,在对话框内拖动鼠标,由大到小或有小到大改变角和实数的范围,然后点击下面的黑色开始键,就可以看到仿真运动了。
对话框示例如下
(b.)仿真采用“模拟”时,点击,即可进入
和
将动画视点和自动插入都选上后,用鼠标拖动command 后的命令块由大到小或由小到大改变角和实数的范围,然后点击下面的黑色开始键,就可以看到仿真运动了
下面以齿轮运动仿真为例说明:
装配过程不多说了,直接进入仿真模块下。
分析:
构成:主动齿轮,从动齿轮,侧板
使两齿轮运动起来,要用到一个新机制,新机制里有一个齿轮铰,两个旋转铰,一个固定铰,一个驱动。
1.在“插入(I)”下,点击新机制命令,可以看到左侧目录树
Application下添加了Mechanisms——Mechanism.1.
2.添加两个旋转铰;点击,出现下面对话框
在Line 1后的空格选择主动齿轮的轴线,
在Line 2后的空格选择侧板孔(安装z z zz 主动齿轮的那个孔)的轴线,
在Plane 1后的空格选择主动齿轮(与侧板相合的那面)的端面,
在Plane 2后的空格选择侧板(与主动齿轮相合的那面)的端面,
点选Angle driven,然后确定即可。
重复上面步骤给从动齿轮添加旋转铰,这里注意:从动齿轮不能点选Angle driven,因为它要被主动齿轮带动。
3. 添加齿轮铰:点击,出现下面命令框
,在这里点选齿轮铰,出现齿轮铰的对话框如下:
在Revolute Joint 1后的框里点选刚刚创建的主动齿轮旋转铰Revolute Joint 1;
在Revolute Joint 2后的框里点选刚刚创建的从动齿轮旋转铰Revolute Joint 2;
Ratio定义为-1,以为主从齿轮转向相反;
点选Angle driven for revolute 1.就是主动轮驱动。
4.添加固定铰:点击,然后用鼠标选中侧板即可。
这时,系统会提示,可以进行仿真了。
5.运动仿真:点击或者都可以。
分别阐述
点击时,出现下面的对话框
这时,系统一般默认命令角度范围是:-360—— 360,点击角度后的可以修改范围,我修改为0——360.
在框的下部,要点选On request,否则你拖动游标时,系统无法记录运动过程。
这些完成后,拖动游标,仿真就开始了。
至于Number of steps,是步数,越大回放时越慢,您可以自己设定不同的值试一试。
点击仿真时,出现
选择机制才能进行仿真,如图,确定。
确定后出现
和
按照图示点选后,即可拖动游标,仿真开始,编辑模拟框将会自动记录下运动过程,拖完以后,可看到编辑模拟框的灰键变黑,表示可以点击回放了。
回放结束后,按确定键,系统将会记录下这次仿真,待以后回放。
在
模型树可以看到
祝你好运,身体健康!。